Paper Menu >>
Journal Menu >>
 American Journal of Computational Mathematics, 2011, 1, 303-317 doi:10.4236/ajcm.2011.14037 Published Online December 2011 (http://www.SciRP.org/journal/ajcm) Copyright © 2011 SciRes. AJCM A Gas Dynamics Method Based on the Spectral Deferred Corrections (SDC) Time Integration Technique and the Piecewise Parabolic Method (PPM) Samet Y. Kadioglu Fuels Modeling and Simulation Department, Idaho National Laboratory, Idaho Falls, USA E-mail: samet.kadioglu@inl.gov Received September 8, 2011; revised November 1, 2011; accepted November 8, 2011 Abstract We present a computational gas dynamics method based on the Spectral Deferred Corrections (SDC) time integration technique and the Piecewise Parabolic Method (PPM) finite volume method. The PPM frame- work is used to define edge-averaged quantities, which are then used to evaluate numerical flux functions. The SDC technique is used to integrate solution in time. This kind of approach was first taken by Anita et al in [1]. However, [1] is problematic when it is implemented to certain shock problems. Here we propose sig- nificant improvements to [1]. The method is fourth order (both in space and time) for smooth flows, and pro- vides highly resolved discontinuous solutions. We tested the method by solving variety of problems. Results indicate that the fourth order of accuracy in both space and time has been achieved when the flow is smooth. Results also demonstrate the shock capturing ability of the method. Keywords: Gas Dynamics, Conservation Laws, Spectral Deferred Corrections (SDC) Methods, Piecewise Parabolic Method (PPM), Godunov Methods, High Resolution Schemes 1. Introduction In this paper, we present a conservative scheme based on the SDC and PPM methods. The integration of the SDC method to the PPM method was first carried out by Anita et al in [1]. However, [1] is problematic in the sense that it is oscillatory when it is applied to certain shock prob- lems unless complicated extra repair steps are introduced. The oscillations are developed around the shocks at ear- lier times, then spread into entire computational region. These oscillations are neutral oscillations (extraneous wiggles) that pollute the solution and never disappear. The main reason for having such wiggles is that the PPM fluxes (without the time averaging in SDC framework) are evaluated in a way to obtain sharper discontinuous profiles, therefore lack of necessary numerical diffusion mechanism. Here, we introduce a strategy that eliminates the oscillatory behavior of [1]. The SDC-PPM method falls in to the class of higher -order high-resolution-schemes. Here, we shall provide a short historical perspective to higher-order high-resolu- tion-schemes. High resolution schemes are designed to solve gas dynamics equations (Gas dynamics equations are also referred to as the inviscid Euler equations or the conservation laws. Hereafter, we will use all of three terminologies interchangeably). In the last several dec- ades, many numerical schemes were introduced for this purpose. Godunov [2] initiated a novel approach that is now accepted as one of the main building blocks for construction of a high resolution scheme. Godunov sup- posed that the initial data could be replaced by a piece- wise constant set of states (i.e, cell averages of the initial solution) with discontinuities located at computational cell edges (cell faces in 3-D). He then found exact solu- tions to this simplified problem by locally performing the well-known Riemann solution theory. Finally, he re- placed exact solutions by a set of piecewise constant ap- proximations (i.e, exact solutions are averaged down to the local cells). Godunov’s method revolutionized the field of computational gas dynamics, by overcoming many of the difficulties that have been persistent for many years. However, Godunov’s method was only first order accurate. The first major improvement to Godunov’s work was made by van Leer [3] who approximated the initial data and solutions at each subsequent time level by piecewise linear segments allowing discontinuities be- 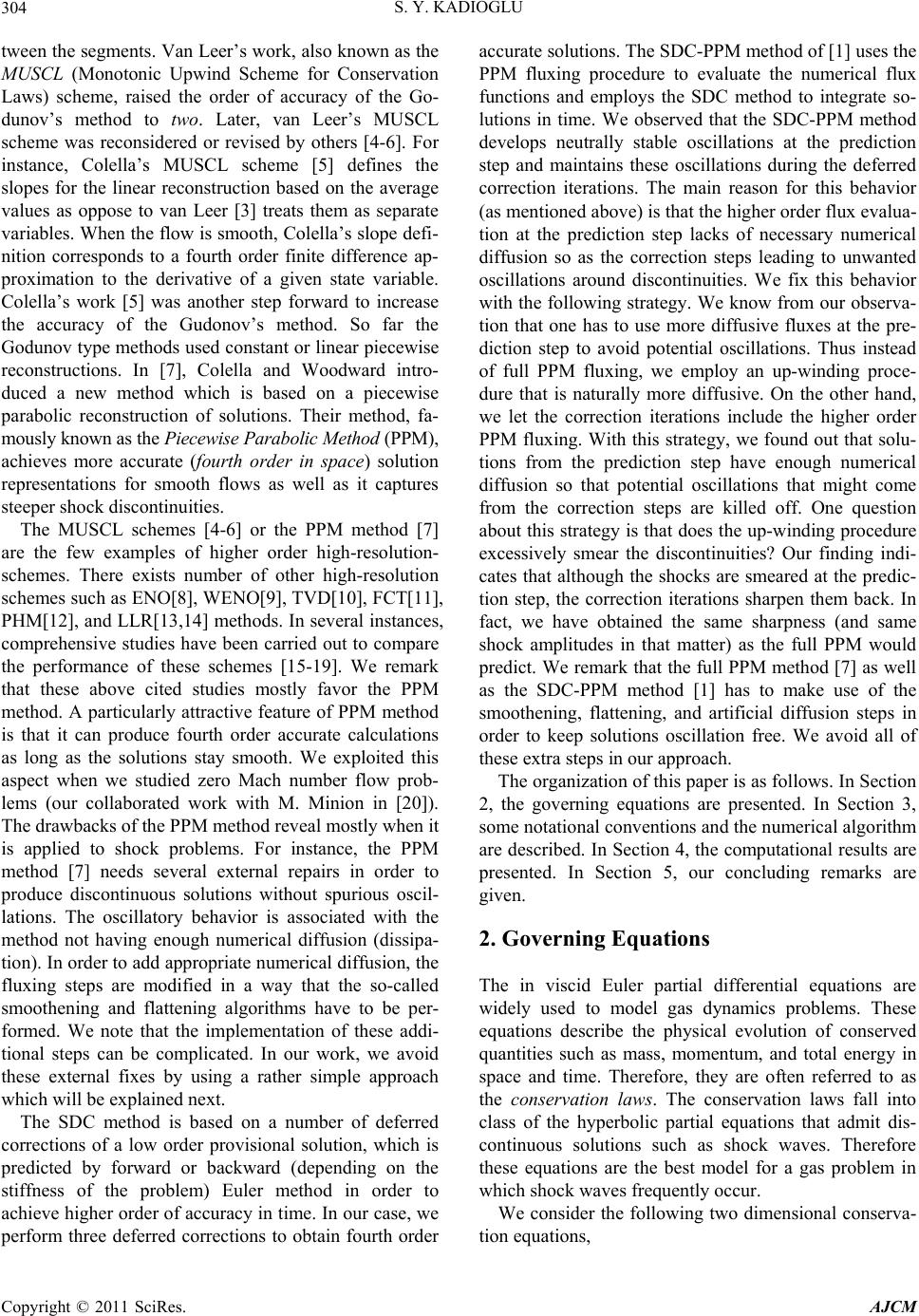 S. Y. KADIOGLU 304 tween the segments. Van Leer’s work, also known as the MUSCL (Monotonic Upwind Scheme for Conservation Laws) scheme, raised the order of accuracy of the Go- dunov’s method to two. Later, van Leer’s MUSCL scheme was reconsidered or revised by others [4-6]. For instance, Colella’s MUSCL scheme [5] defines the slopes for the linear reconstruction based on the average values as oppose to van Leer [3] treats them as separate variables. When the flow is smooth, Colella’s slope defi- nition corresponds to a fourth order finite difference ap- proximation to the derivative of a given state variable. Colella’s work [5] was another step forward to increase the accuracy of the Gudonov’s method. So far the Godunov type methods used constant or linear piecewise reconstructions. In [7], Colella and Woodward intro- duced a new method which is based on a piecewise parabolic reconstruction of solutions. Their method, fa- mously known as the Piecewise Parabolic Method (PPM), achieves more accurate (fourth order in space) solution representations for smooth flows as well as it captures steeper shock discontinuities. The MUSCL schemes [4-6] or the PPM method [7] are the few examples of higher order high-resolution- schemes. There exists number of other high-resolution schemes such as ENO[8], WENO[9], TVD[10], FCT[11], PHM[12], and LLR[13,14] methods. In several instances, comprehensive studies have been carried out to compare the performance of these schemes [15-19]. We remark that these above cited studies mostly favor the PPM method. A particularly attractive feature of PPM method is that it can produce fourth order accurate calculations as long as the solutions stay smooth. We exploited this aspect when we studied zero Mach number flow prob- lems (our collaborated work with M. Minion in [20]). The drawbacks of the PPM method reveal mostly when it is applied to shock problems. For instance, the PPM method [7] needs several external repairs in order to produce discontinuous solutions without spurious oscil- lations. The oscillatory behavior is associated with the method not having enough numerical diffusion (dissipa- tion). In order to add appropriate numerical diffusion, the fluxing steps are modified in a way that the so-called smoothening and flattening algorithms have to be per- formed. We note that the implementation of these addi- tional steps can be complicated. In our work, we avoid these external fixes by using a rather simple approach which will be explained next. The SDC method is based on a number of deferred corrections of a low order provisional solution, which is predicted by forward or backward (depending on the stiffness of the problem) Euler method in order to achieve higher order of accuracy in time. In our case, we perform three deferred corrections to obtain fourth order accurate solutions. The SDC-PPM method of [1] uses the PPM fluxing procedure to evaluate the numerical flux functions and employs the SDC method to integrate so- lutions in time. We observed that the SDC-PPM method develops neutrally stable oscillations at the prediction step and maintains these oscillations during the deferred correction iterations. The main reason for this behavior (as mentioned above) is that the higher order flux evalua- tion at the prediction step lacks of necessary numerical diffusion so as the correction steps leading to unwanted oscillations around discontinuities. We fix this behavior with the following strategy. We know from our observa- tion that one has to use more diffusive fluxes at the pre- diction step to avoid potential oscillations. Thus instead of full PPM fluxing, we employ an up-winding proce- dure that is naturally more diffusive. On the other hand, we let the correction iterations include the higher order PPM fluxing. With this strategy, we found out that solu- tions from the prediction step have enough numerical diffusion so that potential oscillations that might come from the correction steps are killed off. One question about this strategy is that does the up-winding procedure excessively smear the discontinuities? Our finding indi- cates that although the shocks are smeared at the predic- tion step, the correction iterations sharpen them back. In fact, we have obtained the same sharpness (and same shock amplitudes in that matter) as the full PPM would predict. We remark that the full PPM method [7] as well as the SDC-PPM method [1] has to make use of the smoothening, flattening, and artificial diffusion steps in order to keep solutions oscillation free. We avoid all of these extra steps in our approach. The organization of this paper is as follows. In Section 2, the governing equations are presented. In Section 3, some notational conventions and the numerical algorithm are described. In Section 4, the computational results are presented. In Section 5, our concluding remarks are given. 2. Governing Equations The in viscid Euler partial differential equations are widely used to model gas dynamics problems. These equations describe the physical evolution of conserved quantities such as mass, momentum, and total energy in space and time. Therefore, they are often referred to as the conservation laws. The conservation laws fall into class of the hyperbolic partial equations that admit dis- continuous solutions such as shock waves. Therefore these equations are the best model for a gas problem in which shock waves frequently occur. We consider the following two dimensional conserva- tion equations, Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU305 0, FU GU U tx y (1) where U is the vector of conserved quantities, and F(U) and G(U) are the flux functions in x- and y-directions. For instance, , u Uv E 2 , u up FU uv Epu and 2, v uv GU vp Epv where and E denote density, velocity, pres- sure, and the total energy. E satisfies ,,,uv p 22 1. 12 p Eu v (2) This equation is called the equation of state for an ideal polytropic gas. An ideal gas obeying (2) is also referred to as the gamma-law gas with denoting the specific heat ratio. Under ordinary circumstances air is composed primarily of 2 and 2, so N O1.4 . We will use 1.4 in all of our computations. 3. Numerical Algorithm 3.1. Notations and Formulation In this section, we briefly review several notational con- ventions that we have introduced in [20]. For ease of presentation, we assume that the physical domain is two-dimensional and divided into a uniform array of cells of width and height h. Let the cell with center at , ij x ybe denoted by the pair (i, j), and let the half integer subscripts i+ 1/2 and j + 1/2 denote a shift by distance h/2 in the x- and y-direction respectively. The extension to rectangular cells and three dimensions is straightforward. The PPM method or many other high resolution schemes rely on the so called finite-volume approach. The finite-volume approach is based on the evolution of cell averages. A cell average for some quantity ,, x yt is defined by 12 12 12 12 2 1 ,, ,,dd. ij ij xy ij xy x ytxyt yx h (3) Similarly, cell edge averages of a quantity ,, x yt are defined as 12 12 12 12 1 ,, ,,d, j j y ij i y x ytxyt y h (4) and 12 12 12 12 1 ,, ,,d. i i x ij j x x yt xytx h (5) Figure 1 gives a graphical illustration of the above definitions. To specify the finite volume formulation of the conservation law . t UFU0 (6) where ,,Uxyt is the vector of conserved quantities and F(U) = , F UGU is the flux function (notice that Equation (6) is equivalent to Equation (1)), we inte- grate Equation (6) over the computational cells and use the divergence theorem to attain 2 , 1 ,,,, 0 t ij Uxyt FUxyt h (7) where the flux integral above is defined as 12 12 12 12 12 12 , 12 12 ,,,, d ,,,,d j j i i y ii ij y x jj x F UFUxytFUxyt GU xytGU xytx y (8) Using the definitions of the edge average in Equation (4)-(5) ,12ij 12,ij ,ij Figure 1. Cell and cell-edge averaged representation of a quantity . Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU 306 , 12 12 12 12 ,, ,, ,, ,, ., ij ij ij ij ij FU xyt hFUxy tFUxy t hGU x ytGU xyt . (9) Therefore, 12 12 12 12 ,, ,, ,, ,, ,, 0. tij ij ij ij ij Uxyt FUxytFUxy t h GU xytGU x yt h (10) Furthermore, if we let ,, iji j UUxyt, 12, 12 ,, iji j F FU xyt and ,12 12 ,, iji j GGUxyt , then we arrive at 12,12,, 12, 120. ij ijijij ijt FFGF Uhh (11) 3.2. The Fourth Order Spectral Deferred Corrections (SDC) Time Integration Algorithm The construction of stable and accurate numerical meth- ods for solving initial value problems is a well studied subject [21-23]. Runga-Kutta methods or linear multi-step methods are highorder discretization schemes by con- struction. On the other hand, Richardson extrapolation or deferred correction methods are based on increasing the accuracy of a low order method through iterations. The second group is also known as the predictor-corrector techniques. High order direct discretization schemes can be expensive due to the stability constraint. In this case, most practitioners recommend the predictor-corrector techniques. In this paper, we consider the spectral deferred correc- tions method. The spectral deferred corrections (SDC) method, introduced in [24], is a known stable numerical technique with, in principle, arbitrarily high order of ac- curacy. The SDC method proceeds by first using a simple low order numerical method to compute a provisional (predicted) solution at a set of sub-steps within a given time step. Then, an equation for the correction to this provisional solution is constructed and also approximated on the sub-steps with the same numerical scheme. Each iteration at the correction step increases the accuracy of the provisional solution by one. We briefly describe the SDC procedure here, for details see [24-26]. Consider the initial value problem, ,tF tt ,tab, (12) a a (13) The SDC method is based on the observations con- cerning the integral form of the solution to Equations (12)-(13) ,d. t a a tF (14) ,,d t a a Et Ft (15) Since tt t t, Equation (14) is simply ,d a a tt F , (16) which then can be combined with Equation (15) to give (),,d ,. t a tF F Et (17) This equation is referred to as the correction equation. Now given Equations (12) and (13) and time interval 1 , nn tt in which the solution is desired, the SDC method proceeds by first di viding 1 , nn tt into p subin- tervals by choosi points 0m ng forp , with 1pn m t.. 012n tttt tt (18) Here, the interval 1 , nn tt will be referred to as a time step while a subinterval 1 ,, mmmm m tt t tt will be referred to as sub step. Then an approximate solution 0 m t is computed for using a standard forward Euler method. Next, a sequence of corrections 0mp k m t is computed by approximating Equation (17) to provide an increasingly accurate approximation to the solution 1kkk . To achieve this, the function ,t k Et in Equation (17) must be calculated with spectral accuracy, i.e, by a Gaussian quadrature. Our choice of quadrature nodes is the Gauss-Lobatto nodes. This is because the Gauss-Lobatto nodes already include the end points, therefore, one does not have to do ex- trapolations of the final solution to those points. See [25] for different choices of quadrature nodes. A discretization for Equation (17) based on the forward Euler method is given by 1 1 ,, , kkkk k mmm mmmmm kk mm tFt Ft EE (19) where kk mm t , kk m t m and , kk mm EEt . m Each iteration for Equation (19) Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU Copyright © 2011 SciRes. AJCM 307 raises the formal temporal order of accuracy of the scheme by one, therefore for a fourth order method, three iterations (e.g, k = 3) of the correction equation are needed. Also, for a fourth order method, four Gauss- Lobatto points are necessary, i.e, p = 3 in Equation (18). Now reconsider Equation (11) in the following form , ijt ij UfUt (20) where 12,12,, 12, 12 ,. ij ijijij ij FFGF fUthh Here we skipped the bar convention, but ij Uill al- ways represent cell averages. Let , k ij m Uresent the nu- merical solution of Equation (20) at th ms step and th k ate. Then the SDC algorithm can be summarized as: B w rep ub iter asic structure of the SDC algorithm: e Lints, in While tt final Define thobatto po01 3 ,, ,tt t 1 , nn tt , Define 1 ,0ij n UUt ij on step: Predicti Compute the provisional solutions using the forward Eu for orrection sp: onal solutions by solving the cor- re 1 ,1 , ,, , ,,1, ,, ,d m m kk ij mij m kkk mij mij mmij mm t kkk ij mij mij m t tfUtfUt fUUU 1 ,1,1 ,1 , kkk ij mij mij m UU for 0,, 2m end Copy 4 1,ni ij Ut U 3j End 3.3. The Fourth Order PPM Oriented Flux Calculations In this section, we define the cell edge averaged quantities that will be used to calculate the numerical flux functions, i.e, 12,ij and F ,12ij G in (11) or in (20). The procedure is based on Colella and Woodward [7]. In [7], cell edge averages are calculated by interpolating quartic polyno- mials which are constructed through cell averages. For- mulae, in [7], are given for one dimensional non-equally spaced mesh. The formulae below are the two dimen- sional versions of [7] in a uniformly spaced mesh. Below, we systematically describe the steps to calculation of 12,ij and ler method, i.e, 1 U 1 1 ,1 ,, ,, ijmijmmijm m UtfUt 0,, 2m C teF ,12ij G . First, evaluating the interpolation functions ( the construction of interpolation functions and more detail can be found in [7]) at the 12, th ij Correct the provisi ction equation for three iterations, for k = 1, 3 and ,12 th ij edges of cell gives the following edge formulae: ,th ij set ,00 k ij 12,1, ,,1, 11 ˆ 26 xx iji jijijij UUU UU x (21) ,12,1,,,1 11 ˆ 26 yy ijij ijijij UUU UU y (22) where 1, 1,1,,,1, , 1 sgn if0 2 0otherwise x ijij ijij ij ij ij x ij UU UUUU U , (23) 1, 1,1,,, 1, 1 min, 2, 2, 2 x iji jiji jijijij UU UUUU (24) ,1 ,1,1 ,,,1 , 1 sgn if0 2 0otherwise y ijij ijijijijij y ij UU UUUU U , (25) ,1 ,1,1 ,,,1 1 min, 2, 2. 2 y ijij ijijijijij UU UUUU (26) 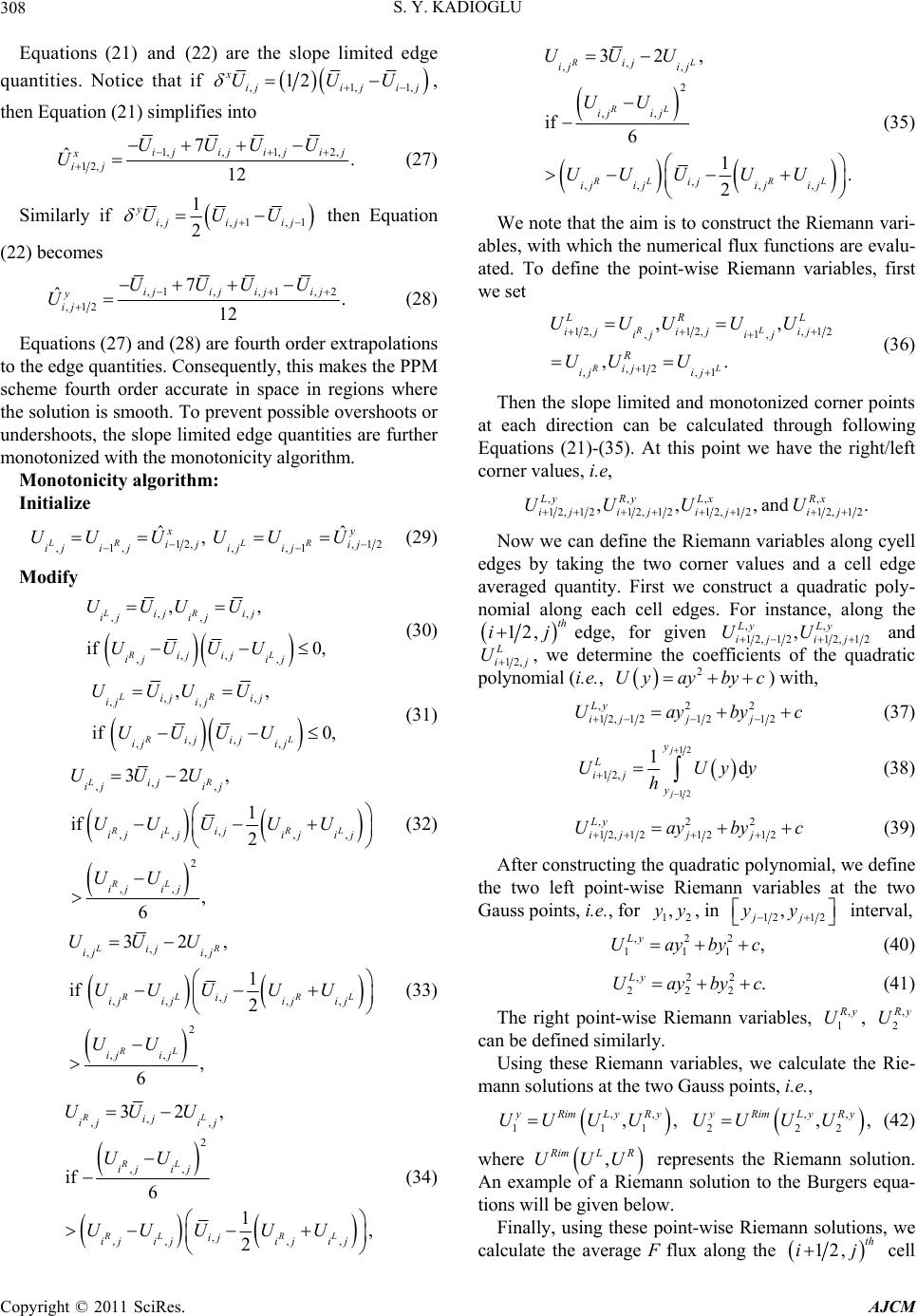 S. Y. KADIOGLU 308 Equations (21) and (22) are the slope limited edge quantities. Notice that if ,1, 12 x iji jij UUU 1, , then Equation (21) simplifies into 1, 7 ˆij xUU U ) ,1,2, . ijiji j UU (27 Similarly if 12 ,12 ij ,,1, 1 2 y ijij ij UUU 1 then (22) becomes Equation ,1,,1, 2 ,12 ˆ. j y ij U (28) 7 12 ijij iji UUUU Equations (27) and (28) are fourth order extrapolations to the edge quantities. Consequently, this mak scheme fourth order accurate in space in regions where th es the PPM e solution is smooth. To prevent possible overshoots or undershoots, the slope limited edge quantities are further monotonized with the monotonicity algorithm. Monotonicity algorithm: Initialize 12, ,1, LR ij ij i j ˆ, x UU U ,12 ,,1 ˆ LR y ij UU U ij ij (29) Modify ,, ,, ,, ,, ,, if 0, LR RL ij ij ij ij ij ij ij ij UUUU UUUU (30) ,, ,, ,, ,, ,, if 0, LR RL ij ij ij ij ijij ij ij UUUU UUUU (31) , ,, , ,, ,, 2 ,, 32, 1 if 2 , 6 LR RL RL RL ij ij ij ij ij ijij ij ij ij UUU UUU UU UU (32) , ,, , ,, ,, 2 ,, 32, 1 if 2 , 6 LR RL RL RL ij ij ij ij ij ijij ij ij ij UUU UUU UU UU (33) , ,, 2 ,, , ,, ,, 32, if 6 1, 2 RL RL RL RL ij ij ij ij ij ij ij ijij ij UUU UU UUUUU , ,, 2 ,, , ,, ,, 32, if 6 1. 2 RL RL RL RL ij ij ij ij ij ij ij ijij ij UUU UU UUU UU (35) We note that the aim is to construct the Riemann vari- ables, with which the numerical flux functions are evalu- ated. To define the point-wise Riemann variables, first we set 12,12,, 12 ,1, ,12 ,,1 ,, ,. RL RL LR ij ijij ijij R ij ij ij UUUUU UU U L (36) Then the slope limited and monotonized corner points at each direction can be calculated through following Equ ations (21)-(35). At this point we have the right/left corner values, i.e, ,,,, 12,1212,1212,1212,12 ,,,and. LyRy LxRx ij ij ijij UUU U Now we can define the Riemann variables along cyell edges by taking the two corner values and a cell edge averaged quantity. First we construct a quad nomial along each cell edges. For instance, along the ratic poly- 12,jedge, for given th i,, 12,1212, 12 , Ly Ly ij ij UU and 12, L ij U, we determine the coefficients of the quadratic polynomial (i.e., 2 Uyayby c ) with, , 12, Ly ij U 22 1212 12 j j aybyc (37) 12 12 12,d j ij y UUyy h (38) 1j y L ,22 12,121212 Ly ijj j Uaybyc (39) structing the quadratefine o left point-wise Riemann variables at the two Gauss points, i.e., After conic polynomial, we d the tw for , in 12 ,yy 12 12 , interval, jj yy c ,22 111 , Ly Uayby c (40) ,22 222 . Ly Uayby (41) The right point-wise Riemann variables, , 1 R y U, , 2 R y U can be defined similarly. Using these Riemann variables, we calc mann solutions at the two Gauss points, i.e. ulate the Rie- , ,, 111 ,, yRimLyRy UU UU ,, 222 ,, yRimLyRy UU UU (42) where , R imL R UUU sents solution. repre the Riemann An exann solution to tions will be given below. Finally, using these point-wise Rie calculate the average F flux along the (34) ample of a Riem the Burgers equa- mann solutions, we 12, th ij cell Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU309 edge as, 12 12,. 2 ij FU FU F (43) yy Similarly we calculate Gfluxes along the ,12 th ij cell edges usg Equations (37)-(42) with d by x, i.e., in y replace 12 . (44) g the SDC t the numerical variables representing cell av- erages and cell edge fluxes are always computed at the same time level (i.e. there is no time-ce as in most second-order Godunov type schemes). A Riemann ,1 22 ij Remark: One observation about usinstrat- egy is tha xx GUGU G ntering of fluxes Solution to the Burgers Equation Consider, 22 11 0. (45) 22 t xy uu u Characteristics speed in both x and y directions is u, i.e., d d xu t and d d yu t. Thus we have to consider the following four cases in both coordinate directions. x-direction: Case 1: If L u and , then the wave (either shock herefore n solution becomes . 0 R u or rare-faction wave) moves from left to right. T the Rieman , R imL RL uuuu (46) Case 2: If L u and 0 R u, then the wave (either ock or rare-factioe) moves from right to left. shn wav efore thann soThere Riemlution becomes ,. R imL RR uuuu (47) Case 3: If0 L R uu, t 0. hen we have a rare-faction wave. Therefore the Riemann solution becomes , RimL R uuu (48) Case 4: If 0 L R uu is then we Th b have a shock wave. e shock speed calculated y . 2 LR L R LR Fu Fuuu suu (49) Then the Riemann solution is giv The Riemann solution in y-dir milarly. e employ a words, we define the left and right values in (36) by using the left and right state of the solution vector, e.g., en by if 0 ,if0, L Rim R us uuuus (50) L R ection is calculated si- Remark: Wn up-winding flux procedure at the SDC’s prediction step. In other 12,, , ij U L ij U 12,1, R ij ij x evaluation for Equations (43) and (44). UU . This provides more diffusive numerical flu 4. Numerical Results 4.1. Solving the Linear Advection Equation We consider, 0, txy uu u 01,01xy (51) As a first test, we use a smooth initial solution; ,,0 sin2π2cos 2π.xyx y (52) In this test, the solution stays smooth i u n time. We monstrate the fourth order of periodic boundary otice sim- ) and (28). Also one doesn’t have to apply ity algorithmr this specific test case. Figure 2 shows the orm of the absolu die indi- cating the stability of the de- creases by the factor ofen for a finer me in solve this test problem to de accuracy of our method. We apply conditions in both x and y-coordinate directions. N that the edge average formulae for the state variable plifies into (27 the monotonic fo nte error for 2 L sixte fferent meshes. The error grows linearly in tim numerical scheme, and sh indicat- g the fourth order convergence. Tables 1-3 show the convergence rates with different norms. The convergence rate is estimated using the two finest grids according to the following formula error 1ln . ln 2error2 x x (53) Figure 2. Demonstrating the fourth order of accuracy of the method with the L2-norm when solving Problem (4.1). Copyright © 2011 SciRes. AJCM 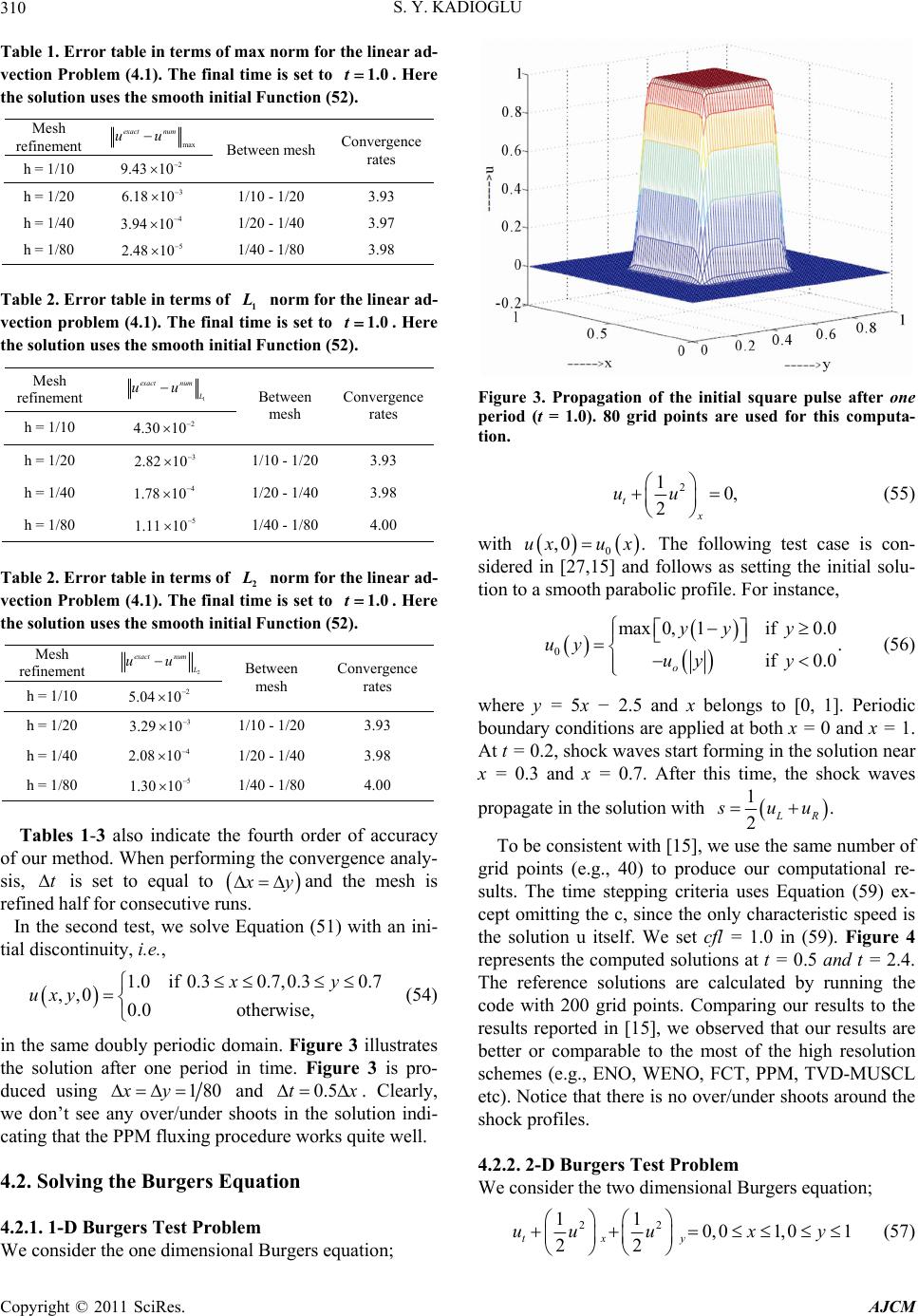 S. Y. KADIOGLU 310 Table 1. Error table in terms of max norm for the linear ad- vection Problem (4.1). The final time is set to. Here the solution uses the smooth initial Function (52). Mesh refinement 1.0t max exact num uu h = 1/10 9.43 Between mesh Convergence rates 2 10 h = 1/20 6.18 1/10 - 1/20 3.93 3 10 h = 1/40 3.94 1/20 - 1/40 3.97 h = 1/80 2.48 1/40 - 1/80 3.98 4 10 5 10 Table 2. Error table in terms of norm for the linear ad- vection problem (4.1). The final is set to. Here the solution uses the smooth initial Function (52). Mesh 1 L time 1.0t refinement 1 exact num L uu h = 1/10 4.30 2 10 Between mesh Convergence rates h = 1/20 2.82 3 10 1/10 - 1/20 3 3.9 h = 1/40 1.78 4 10 1/20 - 1/40 3.98 1.11 1/40 - 1/80 h = 1/80 5 10 4.00 Tabr ta terms of the - veblem ). The final time is set toHere the usessmooh initn (52). refinement le 2. Erro ction Proble in (4.12 L norm forlinear ad 1.0 . t solution the tial Functio Mesh 2 exact num L uu h = 1/10 5.04 2 10 mesh rates Between Convergence h = 1/20 3.293 10 1/10 - 1/20 3.93 h = 1/40 2.08 1/20 - 1/40 3.98 1.30 1/4 4 10 h = 1/80 5 10 0 - 1/80 4.00 Ta -3 also indicate the fourth order of accuracy of od. When performingergenaly- sis set to equal to bles 1 our meth the convce an , t is x y and thes refinehalf for consecutive r Iond te slve E1) wi ini- al discontinuity, i.e., in th doubly period domain. Figure 3 illustrates the solution after one perod iig duc g mesh i d uns. n the secest, woquation (5th an ti 1.0if 0.30.7,0.30.7 ,,0 0.0 otherwise, xy uxy (54) e sameic in time. Fure 3 is pro- ed usin 180xy and early, wee aner/under sindi- cating thPPMuxing proceorks qu 4.2. Solving the Burgers E 4. 0.5tx e solu . Cl don’t sey ovhoots in thtion at the fldure wite well. quation 2.1. 1-D Burgers Test Problem We consider the one dimensional Burgers equation; Figure 3. Propagation of the initial square pulse after one uta- period (t = 1.0). 80 grid points are used for this comp tion. 2 10, 2 t x uu (55) with 0 ,0 .uxu x sidered in [27,15] and follows The following test case is con- as setting the initial solu- tion to a smooth parabolic profile. For instance, 0 max 0,1if0.0. if 0.0 o yy y uy uy y (56) where y = 5x − 2.5 and x belongs to [0, 1]. Periodic boundary conditions are applied at both x = 0 and x = 1. At t = 0.2, shock waves start forming in the solution nea x = x = r 0.3 and 0.7. After this time, the shock waves propagate in the solution with 1. 2LR s uu To be consistent with [15], we use the same number of grid points (e.g., 40) to produce o sults. The time stepping criteria cept omitting the c, since the only characteristic speed is lution u itself. W ning the code with 200 grid points. Comparing our results to the results reported in [15], we observed that our r better or comparable to the most of the high res schemes (e.g., ENO, WENO, FCT, PPM, TVD-MUSCL urgers equation; ur computational re- uses Equation (59) ex- the soe set cfl = 1.0 in (59). Figure 4 represents the computed solutions at t = 0.5 and t = 2.4. The reference solutions are calculated by run esults are olution etc). Notice that there is no over/under shoots around the shock profiles. 4.2.2. 2-D Burgers Test Problem We consider the two dimensional B 22 0, 01, 01 22 txy uuuxy 11 (57) Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU Copyright © 2011 SciRes. AJCM 311 We solve (57) with 1 ,,0 sin2π. 2 uxyxy We apply periodic boundary conditions in both coor- dinate directions. Again the time steps are calculated by (59) with cfl = 0.8. The smooth initial solution turns into a diagonally propagating shock wave around t = 0.05. Figure 5 shows the time history of the numerical solu- tions. The solutions are calculated with 80 grid points in each coordinate directions. From Figure 5, we observe that the shock discontinuities are captured sharply with- out excessive oscillations. The long time run (e.g. t = 3.0 in Figure 5) ind data, 1, 0,1if0.5 ,0 ,,0 ,,00.125,0,0.1 if0.5 x xux pxx This problem is well studied over the years, i.e., in some cases an exact solution can be constructed. Thus it became a benchmark problem in scientific community to test new numerical schemes. We solve this problem in [0,1] interval with inflow boundary conditions. Our com- putational results are produced using 400 grid points. The time step is calculated by , max x tcfl uc (59) icates the stability of our scheme. Tables the solution is still hen cate the fourth order convergence of our scheme. 4.3. Solving the Euler Equations 4.3. 4-6 are created at t = 0.05 while smooth. We note that the limiting procedure was off w producing the Tables 4-6. These tables clearly indiwhere c represents the sound speed and cfl = 0.3. Figure 6 shows the numerical solution at t = 0.15. Figure 6 clearly indicates highly resolved discontinuous solutions (e.g, sharp shock and contact discontinuities) with cor- rect shock locations. 1. Sod’s Shock Tube Problem The shock tube problem considers a long, thin, cylindri- cal tube containing a gas separated by a thin membrane. The gas is assumed to be at rest on both sides of the membrane, but it has different constant pressures an 4.3.2. Interaction of Shock-Acoustic Waves This problem is first studied in [8] and describes the in- teraction of a shock wave with a smooth acoustic entropy wave. The problem solves the one dimensional Euler equations with d densities on each side. At time t = 0, the membrane is ruptured, and the problem is to determine the ensuing motion of the gas. The solution to this problem consists of a shock wave moving into the low pressure region, a rare-faction wave that expands into the high pressure region, and a contact discontinuity which represents the interface. The shock tube problem of Sod [28] solves the one dimensional Euler equations with the following initial ,0 ,,0 ,,0 3.857143,2.629369,10.333333 if0.1 10.2sin5105,0,1 if0.1. xux px x xx (60) The shock wave interacts with the acoustic wave. As a result, the post-shock acoustic profile is amplified (Fig- ure 7). We solve this problem in [0, 1] interval with in- flow boundary conditions. We used 400 grid points and Figure 4. Solution to the one dimensionalBurgers equationst = 0.5 for the left figure and t = 2.4 for the right figure. Numerical solutions are produced with 40 grid points. Solid lines represent reference solutions. ,  S. Y. KADIOGLU 312 Figure 5. The time evolution of the solution to the 2-D Burgers equation. t = 0.0 for the top, t = 1.0 for the middle, anf t = 3.0 for the bottom figures. Figures on the right are the diagonal cuts of the left ones. 80 × 80 mesh is used to produce these re- sults. Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU Copyright © 2011 SciRes. AJCM 313 Table 4. Error table in terms of norm for Problem (4.2.2). The final time is set to 1 L 0.05t . Table 6. Error table in terms of max norm for Problem (4.2.2). The final time is set to . Mesh refinement 0.05t Mesh refinement 1 2hh L uu 2max hh uu 2h = 1/20 1.60 Between mesh Convergence rates Between mesh Convergence rates 2h = 1/20 7.20 3 10 3 10 2h = 1/40 1.25 1/20 - 1/40 3.67 2h = 1/40 1.60 1/20 - 1/40 2.16 4 10 3 10 2h = 1/80 9.01 1/40 - 1/80 3.79 2h = 1/160 6.31 1/80 - 1/160 3.83 2h = 1/80 1.75 6 10 7 10 4 10 1/40 - 1/80 3.19 2h = 1/1601.47 5 10 1/80 - 1/160 3.57 Table 5. Error table in terms of norm for Problem (4.2.2). The final time is set to 2 L 0.05t . Mesh refinement 2 2hh L uu 2h = 1/20 2.50 Between mesh Convergence rates 3 10 2h = 1/40 3.58 1/20 - 1/40 2.80 4 10 2h = 1/80 2.85 1/40 - 1/80 3.65 2h = 1/160 2.11 1/80 - 1/160 3.75 5 10 6 10 cfl = 0.3 in (59) to generate our results. The reference solution is produced with 1600 grid points. Figure 7 shows our computational result. We obtained highly re- solved solution comparable to [8] and [12,14]. This is an important problem to study, since the solution has some structure in the smooth region. As noted in [8], higher order methods perform better in such regions. Our results confirm this. In other words, our results are comparable to higher order ENO [8], higher order PHM (Piecewise Hyperbolic Methods) [12], or higher order LLR (Local Figure 6. Sod’s shock problem.  S. Y. KADIOGLU Copyright © 2011 SciRes. AJCM 314 Figure 7. Shock-acoustic wave pro b le m . t = 0.18. Logarithmic Reconstructions Method) yet better than the second order MUSCL-type schemes. 4.3.3. Interaction of Blast Waves This problem is introduced by Woodward and Colella [17] and is often referred to as the Woodward-Colella blast-wave problem. The problem solves the one dimen- sional Euler equations with (61) The two discontinuities in the initial data each have the form of a shock-tube problem and yield strong shock waves and contact discontinuities going inwards and rare-faction waves going outwards. The boundary condi- tions at x = 0 and x = 1 are reflective solid wall condi- tions, i.e., ,r (62) 1 , (63) We used 400 grid points in the [0, 1] interval and cfl = 0.3 in (59) to generate our results. The reference solution is produced with 1600 grid points. Figure 8 shows the numerical results at t = 0.38. It is clear from Figure 8 that we obtained sharp discontinuities without spurious oscillations. 4.3.4. Smoo th E ul er Solution We solve this problem to verify the fourth order conver- gence of our scheme for the Euler equations. The prob- lem consists of an initial value problem with a smooth solution [29]. The problem considers the gas initially at rest and 3 2 2 ,0 ,,0 ,,0 1,0,10 if00.1 1,0,10 if0.10.9 1,0,10 if0.91 xux px x x x 111 ,,,for1, nnnnnn iiiiii uuppi 11 ,, for1, , nnn nnn Mi MiMiMiMi Mi uupp ir 2 30 12 1 ,,,0,, ,010.1e, r xyzE xyz (64) where 222 .r xyz The solution of this problem  S. Y. KADIOGLU315 Figure 8. Colella’s double blast wave pr oblem. t = 0.38. remains spherically symmetric. Therefore, the three di- mensional Euler equations reduce to the one dimensional conservation laws with a source term [29]. The problem is solved in a [0, 1] domain. On the left end, the reflective wall boundary conditions are used as in Section 4.3.3. On the right end, the outflow boundary conditions are imposed. The numerical solution in Fig- ure 9, produced at t = 0.15 with 160 mesh points, is su- perimposed on a reference solution produced with 1280 points. Table 7 shows convergence rates for the density field. Clearly, it is fourth order. Sin xact solution for this problem, the convergence analysis , again no limiting procedure is performed. rred Correction (SDC) time integration technique and the Piecewise Parabolic Method (PPM) finite volume method. Our method introduces significant improvements to [1] such as the removal of unphysical oscillations due to flux treatment of these oscillations is that [1] uses the same higher order less diffusive fluxes at all SDC steps (prediction plus deferred correction steps). In order to cure the oscillatory be ce we don’t have an e is done similar to the one described in Section 4. We also note that since the solution is smooth 5. Conclusions We have presented an improved gas dynamics method based on the Spectral Defe s. The source havior, [1] has to employ couple of external fixes such as the smoothening, flattening, and artificial diffusion algorithms which are not straightforward to implement in a computer code. We avoid all of these extra steps by making use of an up-winding flux procedure at the pre- diction step. This brings sufficient amount of numerical dif- s t = 0.15. Figure 9. A smooth solution of the Euler equation Table 7. Error table in terms of 2 L norm the smooth Eu- ler solution. The final time is set to 0.15t. Mesh refinement 2 2hh L uu 2h = 1/80 8.87 5 10 Between mesh Convergence rates 2h = 1/160 1/80 - 1/160 3.81 6.33 6 10 2h = 1/320 4.29 7 10 1/160 - 1/320 3.89 2h = 1/640 2.74 8 10 1/320 - 1/640 3.97 fusion so that the deferred correction steps can use less diffusive higher order flux evaluations. With this strategy, we have obtained oscillation-free discontinuous solutions with the quality comparable to the original PPM have also demonstrated the fourth order of accurac [7]. We y of this method in both space and time for smooth flow problems. Copyright © 2011 SciRes. AJCM  S. Y. KADIOGLU 6. References Copyright © 2011 SciRes. AJCM 316 [1] A. T. Layton and M. L. Minion, “Conservative Multi- Implicit Spectral Deferred Correction Methods for Re- acting Gas Dynamics,” Journal of Computational Physics, Vol. 194, No. 2, 2004, pp. 697-714. doi:10.1016/j.jcp.2003.09.010 [2] S. K. Godunov, “Finite Difference Methods for Numeri- cal Computations of Discontinuous Solutions of Equa- tions of Fluid Dynamics,” Math Sbornik, Vol. 47, 1959, pp. 271-306. [3] B. van Leer, “Toward the Ultimate Conservative Differ- ence Scheme. II. Monotonicity and Conservation Com- bined in a Second Order Scheme,” Journal of Computa- tional Physics, Vol. 14, No. 4, 1974, pp. 361-370. doi:10.1016/0021-9991(74)90019-9 [4] J. B. Goodman and R. J. LeVeque, “A Geometric Ap- proach to High Resolution TVD Schemes,” SIAM Jour- nal of Numerical Analysis, Vol. 25, No. 2, 1988, pp. 268- 284. doi:10.1137/0725019 ] P. Colella, “A Direct Eulerian [5 MUSCL Scheme for Gas Dynamics,” SIAM Journal on Scientific Computing, Vol. 6, No. 1, 1985, pp. 104-117. doi:10.1137/0906009 [6] S. F. Davis, “Simplified Second-Order Godunov-Type Me- thods,” SIAM Journal on Scientific Computing, Vol. 9, No. 3, 1988, pp. 445-473. doi:10.1137/0909030 [7] P. Colella and P. R. Woodward, “The Piecewise Para- bolic Method (PPM) for Gas-Dynamics Simulations,” Journal of Computational Physics, Vol. 54, No. 1, 1984, pp. 174-201. doi:10.1016/0021-9991(84)90143-8 [8] C. Shu and S. Osher, “Efficient Implementation of Essen- tially Non-Oscillatory Shock Capturing Schemes II,” Jour- nal of Computational Physics, Vol. 83, No. 1, 1989, pp. 32-78. doi:10.1016/0021-9991(89)90222-2 [9] X. Liu, S. Osher, and T. Chan, “Weighted Essentially Non- Oscillatory Schemes,” Journal on Scientific Computing, Vol. 115, No. 1, 1994, pp. 200-212. doi:10.1006/jcph.1994.1187 Resolution Schemes for Hyperbolic Con- ” Journal of Computational Physics, Vol. [10] A. Harten, “High servation Laws, 49, No. 3, 1983, pp. 357-393. doi:10.1016/0021-9991(83)90136-5 [11] J. Boris and D. Book, “Flux Corrected Transport 1: SHASTA, a Fluid Transport Algorithm That Works,” Journal of Computational Physics, Vol. 11, No. 1, 1973, pp. 38-69. doi:10.1016/0021-9991(73)90147-2 [12] S. Serna, “A Class of Extended Limiters Applied to Pie- cewise Hyperbolic Methods,” SIAM Journal on Scientific Computing, Vol. 28, No. 1, 2006, pp. 123-140. doi:10.1137/040611811 [13] R. Artebrant and H. J. Schroll, “Conservative Logarith- mic Reconstructions and Finite Volume Methods,” SIAM Journal on Scientific Computing, Vol. 27, No. 1, 2005, pp. 294-314. doi:10.1137/03060240X [14] R. Artebrant and H. J. Schroll, “Limiter-Free Third Order Logarithmic Reconstruction.” SIAM Journal on Scientific Computing, Vol. 28, No. 1, 2006, pp. 359-381. doi:10.1137/040620187 [15] H. Q. Yang and A. J. Przekwas, “A Comparative Study of Advanced Shock-Capturing Schemes Applied to Burgers’ Equation,” Journal on Scientific Computing, Vol. 102, No. 1, 1992, pp. 139-159. doi:10.1016/S0021-9991(05)80012-9 [16] R. Liska and B. Wendroff, “Comparison of Several Dif- ference Schemes on 1D and 2D Test Problems for the Euler Equations,” Technical Report, Los Alamos Labo- ratory, 22 November 2001. [17] P. Woodward and P. Colella, “The Numerical Simulation of Two-Dimensional Fluid Flow with Strong Shocks,” Journal on Scientific Computing, Vol. 54, No. 1, 1984, pp. 115-173. doi:10.1016/0021-9991(84)90142-6 [18] R. J. Leveque, “Finite Volume Methods for Hyperbolic Pro- blems,” Cambridge University Press, Cambridge, 2003. [19] R. Hannappel, T. Hauser and R. Friedrich, “A Compari- son of ENO and TVD Schemes for the Computation of Shock-Turbulence Interaction,” Journal of Computationa Physics, Vol. 121, No. 1, 1995, pp. 176-184. .1187 l doi:10.1006/jcph.1995 [20] S. Y. Kadioglu, R. Klein and M. L. Minion, “A Fourth- Order Auxiliary Variable Projection Methods for Zero Mach-Number Gas Dynamics,” Journal on Scientific Com- puting, Vol. 227, No. 3, 2008, pp. 2012-2043. doi:10.1016/j.jcp.2007.10.008 [21] C. Gear, “Numerical Initial Value Problems in Ordinary Differential Equations,” Printice-Hall, Delhi, 1971. [22] E. Hairer, S. P. Norsett, and G. Wanner, “Solving Ordi- nary Differential Equations I, Non-Stiff Problems,” Sprin- ger-Verlag, New York, 1993. [23] J. D. Lambert, “Numerical Methods for Ordinary Differ- ential Equations,” Wiley, Hoboken, 1991. [24] A. Dutt, L. Greengard, and V. Rokhlin, “Spectral Defer- red Correction Methods for Ordinary Differential Equa- tions,” Bit Numerical Mathematics, Vol. 40, No. 2, 2000, pp. 241-266. doi:10.1023/A:1022338906936 compressible Flow Based on Spectral Deferred Correc- the [25] M. L. Minion, “Semi-Implicit Projection Methods for In- tions,” Applied Numerical Mamatics, Vol. 48, No. 3-4, 2004, pp. 369-387. doi:10.1016/j.apnum.2003.11.005 [26] ton and M. L. Minion, “Implications of the of Quadrature Nodes for Picard Int ons Methods for fe- Bit Nematics, Vol. 45, N005, . A. T. Lay Choice Correcti egral Deferred rential Equa o. 2, 2 Ordinary Dif tions,” umerical Math pp. 341-373doi:10.1007/s10543-005-0016-1 [27] Donand J. Am ux Ction ethobolic rva- Journal on Scientific , Vol. 56, No. . 60. i:10991(8 06-2 B. E. Mcld abrosiano, “High-Order Up- wind FlorrecMds For HyperConse tion Laws,” 3, 1984, pp Computing .1016/0021-9448-4do4)901 8] G. Sod, “A Survey of Several Finite Difference Methods [2 for Systems of Nonlinear Conservation Laws,” Journal on Scientific Computing, Vol. 27, No. 1, 1978, pp. 1-31. doi:10.1016/0021-9991(78)90023-2 [29] J. O. Langseth and R. J. LeVeque, “A Wave Propagation Method for Three-Dimensional Hyperbolic Conservation Laws,” Journal on Scientific Computing, Vol. 165, No. 1, 2000, pp. 126-166. doi:10.1006/jcph.2000.6606  S. Y. KADIOGLU Copyright © 2011 SciRes. AJCM 317 s that an av- ct of the averaged values plus a co Appendix Here we define stencils for multiplication and division of the cell averaged (also cell edge averaged in 2-D) quanti- ties in order to compute higher-order accurate numerical flux functions. The primary reason for this i eraged value of a product (or quotient) is not equal to the product (or quotient) of averaged values. The goal here is to express averaged values of quotients or products as the quotient or produrrec- tion term which must be computed by applying a stencil to neighboring averaged values. If we were to derive formula for an averaged value of a product, i.e., i u on the th i cell, we first con the following local series expansions sider 2 iixi i xx , i 2 x xxx x xx (65) x , 2 2 iixi uxuxxx ux i xx i xx ux Recalling that (66) 12 12 1d i i x i x x x x . (67) Evaluating this integral with (65) 2 4. 24 i ii xx xOx (68) Now consider 12 1d i x i uxux x 12 i x .x ( Evaluating this integral with (65), (66), and using (68) we obtain 69) 4. 2 x 24 ii iix x i uu uOx (70) To derive a stencil for i x , we consider 2 22 2 xx x 3 , (71) 226 ii i ii xxxxxx 23 1, 2 ii i ii xxxxxx xx x (72) 6 23 1, 26 ii i ii xxxxxx xx x (73) 23 22xx 22, 26 ii i i ixxxxxx x (74) Summing the above four expressions we get 3 571 34723473574482 ii x xxx xx or 2 2112 534345 . 48 24 i i iiii x xxx x x (75) Using (68) in (75) we obtain 2112 2 48 i iiii xx 53434 5 2112 2 53 4345 24 48 ii ii xx xxxx xx x x (76) . 24 i xxx x Considering series expansions (71), (72), (73), and (74) for x x terms in (76) and carrying out the similar alge- bra, we arrive the following fourth order expression 4 2112 534345 48 i iiii xOx x (77) Derivation of an averaged value for a quotient and several more details can be found in [20]. |