Y. P. ZENG ET AL.
254
0,10 ,or1,00
.
When the parameters satisfy 11
, we can obtain
the following corollary from Theorem 2.3.
Corollary 2.4. Let 11
. Then the matrix 1
A
has one eigenvalue which given by λ = 1 with algebraic
multiplicity n + r. The remaining m − r eigenvalues lie in
the interval (0, 1).
3. Numerical Experiments
We consider the following finite element discretization
of the time-harmonic Maxwell equations (k2 = 0) [5,8].
The following two-dimensional Model problem is con-
sidered: find u and p that satisfy
in
0in
0on
0on
upf
u
u
p
n
(7)
Here is a simply connected polyhedron do-
main with a connected boundary ∂Ω, and ~n denotes the
outward unit normal on ∂Ω. The datum
2
R
is a given
source (not necessarily divergence free). Using the low-
est order N’ed’elec elements of first kind [9,10] for the
approximation of the vector field and standard nodal
elements for multiplier yields the following saddle-point
linear system
.
0
0
Tug
FB
x
p
B
b
Experiments were done in a square domain (0 ≤ x ≤ 1;
0 ≤ y ≤ 1). And we set the right-hand side function so
that the exact solution is given by
,1,1
T
uxyyyxx .
In our numerical experiments the matrix W in the
augmentation block preconditioner is taken as W = I.
We consider three meshes with different values of n
and m in Table 1. Table 2 shows iteration counts for
different η and meshes, applying BiCGSTAB of
block-triangular preconditioner, and 11
. We ob-
Table 1. Values of n and m and size of the linear systems for
three meshes.
h n m n + m
1
8 176 49 225
1
16 225 736 961
1
32 961 3008 3969
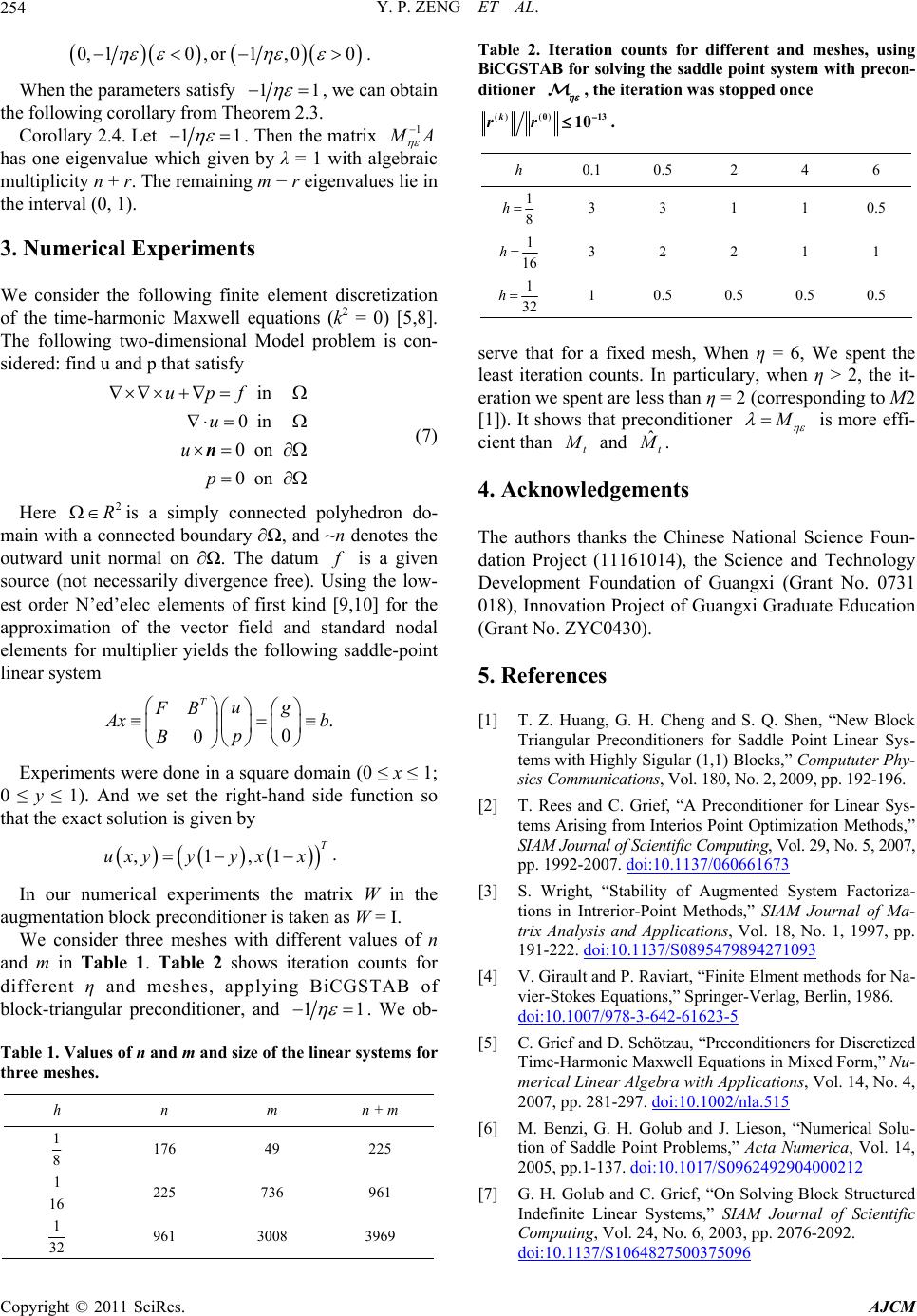
Table 2. Iteration counts for different and meshes, using
BiCGSTAB for solving the saddle point system with precon-
ditioner
, the iteration was stopped once
() 013k
rr
()10
.
h 0.1 0.5 2 4 6
1
8
h
3 3 1 1 0.5
1
16
h3 2 2 1 1
1
32
h1 0.5 0.5 0.5 0.5
serve that for a fixed mesh, When η = 6, We spent the
least iteration counts. In particulary, when η > 2, the it-
eration we spent are less than η = 2 (corresponding to M2
[1]). It shows that preconditioner
is more effi-
cient than t
and ˆt
.
4. Acknowledgements
The authors thanks the Chinese National Science Foun-
dation Project (11161014), the Science and Technology
Development Foundation of Guangxi (Grant No. 0731
018), Innovation Project of Guangxi Graduate Education
(Grant No. ZYC0430).
5. References
[1] T. Z. Huang, G. H. Cheng and S. Q. Shen, “New Block
Triangular Preconditioners for Saddle Point Linear Sys-
tems with Highly Sigular (1,1) Blocks,” Compututer Phy-
sics Communications, Vol. 180, No. 2, 2009, pp. 192-196.
[2] T. Rees and C. Grief, “A Preconditioner for Linear Sys-
tems Arising from Interios Point Optimization Methods,”
SIAM Journal of Scientific Computing, Vol. 29, No. 5, 2007,
pp. 1992-2007. doi:10.1137/060661673
[3] S. Wright, “Stability of Augmented System Factoriza-
tions in Intrerior-Point Methods,” SIAM Journal of Ma-
trix Analysis and Applications, Vol. 18, No. 1, 1997, pp.
191-222. doi:10.1137/S0895479894271093
[4] V. Girault and P. Raviart, “Finite Elment methods for Na-
vier-Stokes Equations,” Springer-Verlag, Berlin, 1986.
doi:10.1007/978-3-642-61623-5
[5] C. Grief and D. Schötzau, “Preconditioners for Discretized
Time-Harmonic Maxwell Equations in Mixed Form,” Nu-
merical Linear Algebra with Applications, Vol. 14, No. 4,
2007, pp. 281-297. doi:10.1002/nla.515
[6] M. Benzi, G. H. Golub and J. Lieson, “Numerical Solu-
tion of Saddle Point Problems,” Acta Numerica, Vol. 14,
2005, pp.1-137. doi:10.1017/S0962492904000212
[7] G. H. Golub and C. Grief, “On Solving Block Structured
Indefinite Linear Systems,” SIAM Journal of Scientific
Computing, Vol. 24, No. 6, 2003, pp. 2076-2092.
doi:10.1137/S1064827500375096
Copyright © 2011 SciRes. AJCM


