G. X. LI ET AL.
Copyright © 2011 SciRes. OJMI
47
Taitnes on liveing sam
C RPre-t PostImpent
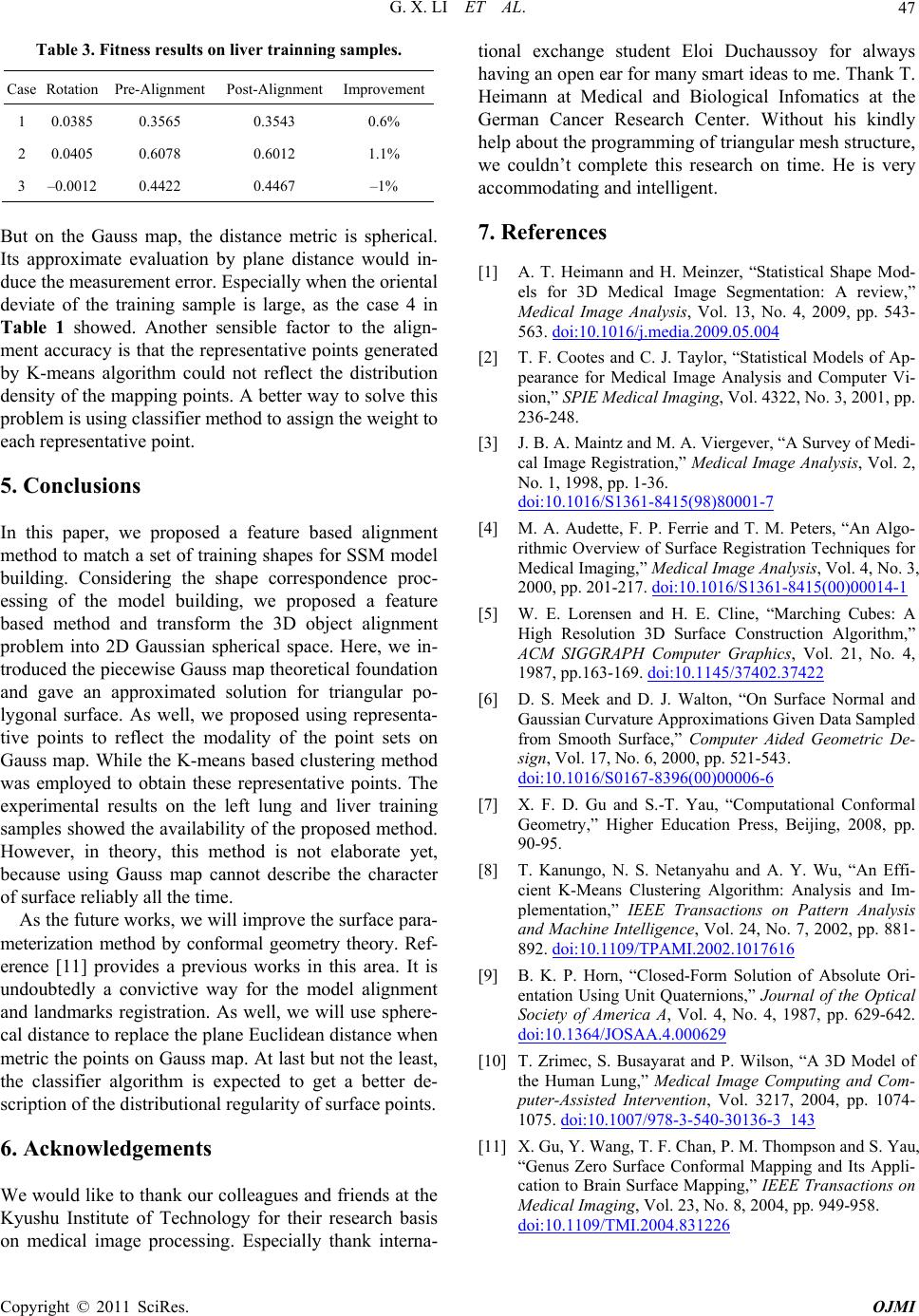
ble 3. Fs resultsr trainnples.
aseotation Alignmen-Alignment rovem
1 0.0385 0.3565 0.3543 0.6%
2 0.0405 0.6078 0.6012 1.1%
3 –0.0012 0.4422 0.4467 –1%
Buss me distance metric is spherical.
te evaluation by plane distance w in-
proposed a feature based alignment
set of training shapes for SSM model
olleagues and friends at the
ogy for their research
on medical image processing. Especially thank interna-
, “Statistical Shape Mod-
edical Image Segmentation: A review,”
Analysis, Vol. 13, No. 4, 2009, pp. 543-
t on the Gau
proxima
ap, th
Its ap
d
ould
uce the measurement error. Especially when the oriental
deviate of the training sample is large, as the case 4 in
Table 1 showed. Another sensible factor to the align-
ment accuracy is that the representative points generated
by K-means algorithm could not reflect the distribution
density of the mapping points. A better way to solve this
problem is using classifier method to assign the weight to
each representative point.
5. Conclusions
In this paper, we
method to match a
building. Considering the shape correspondence proc-
essing of the model building, we proposed a feature
based method and transform the 3D object alignment
problem into 2D Gaussian spherical space. Here, we in-
troduced the piecewise Gauss map theoretical foundation
and gave an approximated solution for triangular po-
lygonal surface. As well, we proposed using representa-
tive points to reflect the modality of the point sets on
Gauss map. While the K-means based clustering method
was employed to obtain these representative points. The
experimental results on the left lung and liver training
samples showed the availability of the proposed method.
However, in theory, this method is not elaborate yet,
because using Gauss map cannot describe the character
of surface reliably all the time.
As the future works, we will improve the surface para-
meterization method by conformal geometry theory. Ref-
erence [11] provides a previous works in this area. It is
undoubtedly a convictive way for the model alignment
and landmarks registration. As well, we will use sphere-
cal distance to replace the plane Euclidean distance when
metric the points on Gauss map. At last but not the least,
the classifier algorithm is expected to get a better de-
scription of the distributional regularity of surface points.
6. Acknowledgements
We would like to thank our c
Kyushu Institute of Technolbasis
tional exchange student Eloi Duchaussoy for always
having an open ear for many smart ideas to me. Thank T.
Heimann at Medical and Biological Infomatics at the
German Cancer Research Center. Without his kindly
help about the programming of triangular mesh structure,
we couldn’t complete this research on time. He is very
accommodating and intelligent.
7. References
[1] A. T. Heimann and H. Meinzer
els for 3D M
Medical Image
563. doi:10.1016/j.media.2009.05.004
[2] T. F. Cootes and C. J. Taylor, “Statistical Models of Ap-
pearance for Medical Image Analysis and Computer Vi-
sion,” SPIE Medical Imaging, Vol. 4322, No. 3, 2001, pp.
pp. 1-36.
236-248.
[3] J. B. A. Maintz and M. A. Viergever, “A Survey of Medi-
cal Image Registration,” Medical Image Analysis, Vol. 2,
No. 1, 1998,
doi:10.1016/S1361-8415(98)80001-7
[4] M. A. Audette, F. P. Ferrie and T. M. Peters, “An Algo-
rithmic Overview of Su
Medical Imaging,” Medical Image Ana
rface Registration Techniques for
lysis, Vol. 4, No. 3,
2000, pp. 201-217. doi:10.1016/S1361-8415(00)00014-1
[5] W. E. Lorensen and H. E. Cline, “Marching Cubes: A
High Resolution 3D Surface Construction Algorithm,”
ACM SIGGRAPH Computer Graphics, Vol. 21, No. 4,
1987, pp.163-169. doi:10.1145/37402.37422
[6] D. S. Meek and D. J. Walton, “On Surface Normal and
Gaussian Curvature Approximations Given Data Sampled
from Smooth Surface,” Computer Aided Geometric De-
sign, Vol. 17, No. 6, 2000, pp. 521-543.
doi:10.1016/S0167-8396(00)00006-6
[7] X. F. D. Gu and S.-T. Yau, “Computational Conformal
Geometry,” Higher Education Press, Be
90-95.
ijing, 2008, pp.
ation,” IEEE Transactions on Pattern Analysis
[8] T. Kanungo, N. S. Netanyahu and A. Y. Wu, “An Effi-
cient K-Means Clustering Algorithm: Analysis and Im-
plement
and Machine Intelligence, Vol. 24, No. 7, 2002, pp. 881-
892. doi:10.1109/TPAMI.2002.1017616
[9] B. K. P. Horn, “Closed-Form Solution of Absolute Ori-
entation Using Unit Quaternions,” Journal of the Optical
Society of America A, Vol. 4, No. 4, 1987, pp. 629-642.
doi:10.1364/JOSAA.4.000629
[10] T. Zrimec, S. Busayarat and P. Wilson, “A 3D Model of
the Human Lung,” Medical Image Computing and Com-
puter-Assisted Intervention, Vol. 3217, 2004, pp. 1074-
1075. doi:10.1007/978-3-540-30136-3_143
[11] X. Gu, Y. Wang, T. F. Chan, P. M. Thompson and S. Yau,
“Genus Zero Surface Conformal Mapping and Its Appli-
cation to Brain Surface Mapping,” IEEE Transactions on
Medical Imaging, Vol. 23, No. 8, 2004, pp. 949-958.
doi:10.1109/TMI.2004.831226



