Communications and Network
Vol.5 No.3(2013), Article ID:35662,8 pages DOI:10.4236/cn.2013.53029
Topology Control for Ad-Hoc Networks: A Comprehensive Review for Table Driven and On-Demand Routing Protocols
School of Electrical and Computer Engineering State University of Campinas—UNICAMP, Campinas, Brazil
Email: jeferson,lee@decom.fee.unicamp.br
Copyright © 2013 Jeferson Wilian de Godoy Stênico, Lee Luan Ling. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received April 10, 2013; revised May 10, 2013; accepted June 10, 2013
Keywords: Ad-Hoc; Distributed Protocols; On-Demand Protocols; Routing Tables
ABSTRACT
Routing on ad-hoc network has become a major research issue among the networking communities due to its increasing complexity and the surge of challenging problems. One major factor contributing to this tendency is that every terminal of an ad-hoc network is also functioning as a network router. In this paper we provide a comprehensive review about the principles and mechanisms of routing protocols used in ad-hoc networks. For comparison purposes, we discuss some relevant technical issues of two well-known routing strategies, namely On-Demand (Proactive routing) and Table-Driven (Reactive routing). In particular, focus our attention on two major and well-known routing protocols: AODV (Ad-hoc On-Demand Distance Vector Protocol) and OLSR (Optimized Link State Routing Protocol). Our study has no intention to suggest any definite solution for any ad-hoc network, because it is the case depending on dictated by the nature and varying factors of networks. Instead, we demonstrate our major perception and describe general models that may assist us while modeling a given network.
1. Introduction
A routing algorithm can be viewed as a part of the set of software or programs executed by the network layer and is responsible for transporting traffic packets from their sources to their destinations. Routing algorithms on Ad-hoc networks have become a never-ending developing issue. IETF (Internet Engineering Task Force) [1] has created a specific working group to address the problems and standards of routing algorithms on mobile ad-hoc networks.
One of the major challenges of routing on ad-hoc networks is the loss of communication. The phenomenon happens either when terminals are turned off or when they move out of covered regions. Losses of communication cause serious problems on networks. Suitable solution to this kind of problem should be considered as early as during network design on the architecture level [2].
Network performance depends directly on the quality of routing algorithms [3,4]. Routing problems and strategies have been widely investigated in recent years. Many routing protocols and algorithms have proposed implemented and used to solve routing problems [5-7]. In practice, those protocols were designed to deal with network operational constraints such as energy consumption of mobile nodes, limited bandwidth and high bit error rates.
There is no consensus about the best routing strategy for ad-hoc networks. Each protocol presents some advantages as well as disadvantages, which are connected to a specific scenario [8]. Therefore, from a network designer’s point of view, the search of routing protocol should focus on the one better suiting the scenario, instead of the best one under certain criteria. In this paper we provide a close comparison between two major routing perceptions for networks under ad-hoc network environment: table-driven and on-demand protocols. A table-driven protocol constantly scans the network in order to maintain and update optimal routing paths between every pair of terminals. An on-demand protocol, on the other hand, literally generates some routing directions on-demand not necessarily optimal ones.
In literature there are many research works illustrate different aspects of routing over ad-hoc networks [3,8- 10]. The most popular table-driven ones include: OLSR (Optimized Link State Routing), DSDV (Destination-Sequenced Distance-Vector Routing), WRP (Wireless Routing Protocol) and CGSR (Cluster-head Gateway Switch Routing). For on-demand categories, we cite: AODV (Ad-hoc On-demand Distance Vector Routing), DSR (Dynamic Source Routing), LMR (Lightweight Mobile Routing), TORA (Temporally Ordered Routing Algorithm), ABR (Associatively-Based Routing) and SSR (Signal Stabile Routing).
In this paper, a brief survey regarding different routing mechanisms by considering basic features and functionalities within their classifications is given. In addition, we focus on a comparison between two major routing protocols: OLSR (Optimized Link State Routing) and AODV (Ad-hoc On-demand Distance Vector), estimating their performances under various scenarios through simulation.
This paper is organized as follows. In Section 2 we present and describe the characteristics of the routing mechanism for each above mentioned routing protocol, starting with one belonging to the on-demand category and then the table-driven ones. In Section 3, we define a complexity measure of OLSR and AODV protocols and provide a comparison analysis based on the defined measures. In Section 4, we present and compare networking simulation results for AODV and OLSR protocols, In Section 5 we present our comments and conclusions. Finally in Section 6 we provide some clues regarding possible future work.
2. Routing Mechanisms
Today, with a tremendous number of routing techniques and protocols, as wireless communication technology is increasing on daily basis, there not exists a single optimal solution for routing. Technologically speaking, a routing algorithm has the goal of mapping the network topology onto a routing table. Construction, upgrade and maintenance costs vary according to the routing method chosen. Given the dynamic nature of an ad-hoc network, protocols developed for wired networks are considered efficient. Also, routing has shown great a challenge with the consumption of energy and bandwidth, and achieves a good level of quality service. We distinguish between proactive and reactive protocols (on-demand and tabledriven respectively). On this section will list some of these protocols, emphasizing the AODV and OLSR protocols.
2.1. On-Demand Protocols
2.1.1. AODV
AODV protocol was originally designed as an adaptive routing protocol for scenarios where there are terminals with high mobility. The protocol intends to avoid waste by bandwidth caused by traffic control messages (used for routing table information updating). Instead of usingthe traditional routing table approach, this protocol discovers routes “on-demand”. Whenever two terminals intend to establish a connection, this routing protocol is invoked to initiate a Route Discovery process which is a flooding mechanism used to learn the current network routing environment. Once a route between two terminals is established, the route and routing information is saved at two terminal nodes for a determined period of time so that the same route can be used by new data as long as it is necessary. As a result, there is a considerable reduction in transmitting overhead information.
An important aspect of AODV routing is the maintenance of existing routes. Since the nodes are mobile, their movement may cause rupture of the established route links, therefore making the route no longer valid. To validate the integrity of already established routes can be done by sending hello packets [11]. Whenever a terminal fails to receive hello messages, the source node removes the corresponding route and updated its cache information.
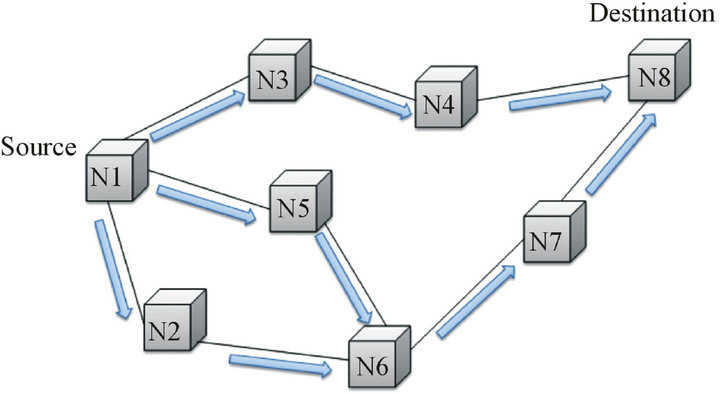
Figure 1(a) illustrates the propagation of the broadcast RREQs (route request packets) across the network. AODV utilizes sequence numbers to determine an up-to-date path to a destination, i.e. every entry in the routing table is associated with a sequence number. The sequence number act as a route timestamp, ensuring freshness of
 (a)
(a)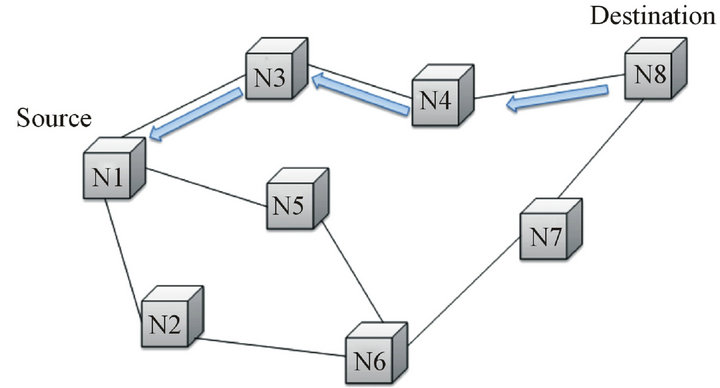 (b)
(b)
Figure 1. AODV route discovery. (a) Propagation of the RREQ; (b) Path of the RREP to the source.
the route.
Each node maintains its own sequence number, as well as a broadcast ID. The broadcast ID is incremented for every RREQ that the node initiates, and together with the node’s IP address, uniquely identifies the origin of the RREQ. Along with its own sequence number and the broadcast ID, the source node includes in the RREQ the most recent sequence number it has for the destination. Intermediate nodes can reply to the RREQ only if they have a route to the destination with corresponding destination sequence number is greater than or equal to that contained in the RREQ.
During the process of forwarding the RREQ, intermediate nodes record in their routing tables the address of the neighbor from which the first copy of the broadcast packet is received, thereby establishing the next link of the path. If additional copies of the same RREQ are later received, these packets are discarded. Once a RREQ arrives the destination or an intermediate node with a fresh enough route, the destination/intermediate node responds by unicasting a route reply (RREP) packet back to the neighbor from which the first RREQ was received (see Figure 1(b)). As the RREP is routed back along the reverse path, nodes along this path set up forward route entries in their routing tables which point to the node from which the RREP came. These forward route entries indicate the active forward route. There is a route timer which is associated with each route entry, measuring the time period on which the entry has not been used. When the time is longer than a specified lifetime value, the entry is deleted. Notice that AODV can only support the use of symmetric links, since the RREP is forwarded along the path established by the RREQ in the reverse direction.
2.1.2. Dynamic Source Routing (DSR)
Dynamic Source Routing is an on-demand routing protocol similar to AODV. However, the protocol is a source routing based one instead of using the routing table information provided by intermediate nodes. In other word, each node along the path receives directly from the source node all necessary routing instruction. There many improved versions of DSR, including DSRFLOW [12].
2.1.3. Lightweight Mobile Routing Algorithm (LMR)
Lightweight Mobile Routing Algorithm [5], an on-demand routing protocol belongs to the class of link reversal algorithms. The LMR algorithm was developed for routing in highly dynamic mobile networks. If the mobility is extremely high, the only possible routing strategy is flooding the network with a message and hoping that the message will eventually reach the destination.
On the other hand, if mobility is low, shortest path based algorithms are more appropriate as shortest path computations converge before the nodes move. The LMR algorithm is suitable in an intermediate domain when mobility is not so low that shortest path algorithms can converge, and mobility is not so high that flooding is the only possibility.
The LMR algorithm is loosely based on the link-reversal strategy of the Gafni-Bertsek as algorithm [6].
2.1.4. Temporally-Ordered Routing Algorithm (TORA)
Temporally-Ordered Routing Algorithm [13] attempts to achieve a high degree of scalability using a “flat”, nonhierarchical routing mechanism. During its operation, the protocol avoids the generation of far-reaching control message propagation. For this end, the protocol builds and maintains a Directed Acyclic Graph (DAG) rooted at a destination. This is an unusual routing approach in comparison to the traditional shortest path solution.
This protocol performs the following three basic functions, namely route creation, route maintenance and route erasure. During the route creation and maintenance phases, nodes use a height metric to establish a directed acyclic graph (DAG). Therefore, links are selected on base of best relative metric to its neighbor nodes. With movement of terminals, the current DAG can no longer valid. Therefore, the route maintenance module is activated to update DAG route to its destination. Timing is an important parameter of TORA because the used metric measure is in function of logical time of link failure. TORA’s route erasure phase essentially consists of generating and transmitting broadcast clear packets (CLR) throughout the network to eliminate invalid routes.
2.1.5. Associativity-Base Routing (ABR)
Associatively-Base Routing (ABR) was invented and developed by C.K. Toh at the Cambridge University in1996 [14]. It is a source-initiated routing protocol, that is, itdoes not need periodic route updating. ABR selects a route based on the temporal stability of links between nodes. ABR is beacon-based: each node generates periodic beacons (hello messages) to notify its existence to its neighbors. These beacons are used to update the associated routing table on each node. Nodes on the network use temporal stability and associated routing tables to check the stability status of each link (stable or unstable). A fundamental objective of ABR is to find longer-lived routes. ABR consists of 3 operational phases: Route Discovery, Route Repair/Reconstruction and Route Delete. A detailed description of these operations is given in [14].
2.1.6. Signal Stability Routing (SSR)
Signal Stability Routing algorithm [15] can be viewed as a logical descendant of ABR. A new technique of route selection based on the signal strength and location stability of nodes along the path is used. As in ABR, the selects paths may not be necessarily optimal. Instead, more stable and longer-lived routes are selected. This algorithm has a major weakness, unlike in AODV and DSR, that intermediate nodes cannot reply to route requests sent toward the destination. Therefore, potentially SSR exhibits longer delays before routes are indeed discovered. Additionally, when a link failure occurs along a path, the route discovery algorithm must be re-invoked by the source. No attempt will be made to use partial route recovery (unlike ABR); that is, to allow intermediate nodes to rebuild the route by themselves.
2.2. Table Driven
2.2.1. OLSR (Optimal Link State Routing)
OLSR (Optimal Link State Routing) protocol provides a more organized and efficient way to manage traffic control packets between two nodes based on a shortest path strategy [10]. As a proactive protocol, OLSR periodically exchange information among nodes in order to acquaint itself the network status. Consequently the routing tables of network nodes are maintained constantly updated with link state messages. However, the protocol limits the number of nodes that are allowed to forward link state messages in order help to preserve high network throughput. The technique employed for this limitation is called MPR (Multi-Point Relay), by which a link state message is sent by piggyback over hello messages as far as 2 hops from the source MPR node and therefore preventing network flooding. Note that through MRP the number of nodes allowed to retransmit control packets is limited.
MPR nodes are those selected from all network nodes by a distribute algorithm, using a consensus among their one hop environment. Hence, when a MPR nodes updates link state (control messages), this information is sent only to their close neighbors. Thus, each node only receives this information once.
2.2.2. Destination-Sequenced Distance-Vector Routing (DSDV)
Destination-Sequenced Distance-Vector Routing is a table-driven routing scheme for mobile ad-hoc networks based on the Bellman-Ford algorithm. The DSDV was developed by Perkins and Bhagwat in 1994 [2]. The main feature of DSDV is its ability of solving problems of loops within the network. The mechanism of this protocol is the following: each entry of the routing table contains a sequence number, those numbers are generally even when a link is present; else, an odd number is used. Each sequence number is generated by the destination, and the emitter needs to send out the next update with this number. Routing information is being distributed between nodes by sending full dumps infrequently and smaller incremental updates more frequently.
2.2.3. Wireless Routing Protocol (WRP)
Wireless Routing Protocol is a proactive unicast routing mechanism for mobile ad-hoc networks (MANETs). WRP [16] uses an enhanced version of the distancevector routing protocol. It uses as well the Bellman-ford algorithm to determine routing tables; therefore, it is capable of reducing route loops and ensuring reliable message exchange. Because of the mobile nature of the nodes within the MANET, the protocol introduces mechanisms which reduce route loops and ensure reliable message exchange.
The wireless routing protocol, similar to DSDV, inherits the properties of the distributed Bellman-Ford algorithm. To solve the count-to-infinity problem and to enable faster convergence, it employs a unique method of maintaining information regarding the shortest path to every destination node and the penultimate hop node on the path to every destination node in the network.
2.2.4. Clusterhead Gateway Switch Routing (CGSR)
Clusterhead Gateway Switch Routing [17] uses DSDV as an underlying protocol. Mobile nodes are partitioned into clusters. A cluster-head is elected using a distributed algorithm. All nodes within the communication range of a cluster-head belong to the cluster. A node that is covered within communication range of two or more clusterheads is called a gateway node. CGSR runs a Least Cluster Change (LCC) clustering algorithm to form cluster. Change of a cluster-head occurs either when two clusterheads are united or when a node moves out of the range of all the cluster-heads. A cluster-head controls a group of ad-hoc hosts and is in charge of broadcasting within the cluster, forwarding messages and dynamic channel scheduling.
3. Theoretical Analysis of Routing Protocols
A mobile ad-hoc network (MANET) consists of a set of wireless mobile nodes that communicate with each other without an established infrastructure (e.g. absence of base stations). Hence, communications on such networks are motivated by the protocol which is found within each terminal. In this section we compare proactive and reactive protocols form theoretical points of view and analysis. Royer [7] suggest an average analysis based on simulations for those two types of protocols. However we will try to make a more general analysis in order to compare, numerically, between those two types of protocols:
Proactive or Table-Driven Protocols always maintain and update routing information so that the updated structure of the entire network is always known. The information is maintained on the routing table of each terminal and instructseach terminal how to deliver packets to other network terminals. Therefore, proactive protocols always handle large numbers of control messages for routing table updating. As described in the previous section, control messages can be implemented in many different ways. But, as illustrated before, most of them rely on the Bellman-Ford algorithm. Accordingly, each terminal has to send its link state across all edges of the network. Therefore, the cost of maintaining proactive networks (apart from routing purposes) depends on the complexity of the algorithm, which is O(n2) [7]. This cost of algorithmic complexity is generated every time interval, which is proportional to the network characteristics (mobility and specific network characteristic). In addition, we need also to add session cost (cost of sending a data packet to other terminal). Notice that this session cost actually varies between that of optimal case (via the shortest path) and that of the worst case (when nodes are connected in sequence—a string form—therefore, O(n) [7]).
Reactive or On–Demand Protocols were designed to avoid heavy control overhead [2]. This protocol type doesn’t rely on control messages to build routing tables. Instead, they establish paths between terminals “on-demand”. Hence, reactive protocols reduce the amount of bandwidth consumed by control messages. However, the burden of using a reactive protocol is the increasing in route cost since the path may not be optimal ones. The cost needed to maintain established paths varies largely. The worst situation is when search thoroughly cover all network nodes. Therefore, the cost in this case is O(n2) for a single packet delivery.
In conclusion, we suggest the following formulas for accumulated cost up to time instance t for proactive and reactive protocol, respectively:
 (1)
(1)
and
 (2)
(2)
where
• n : Network density (number of nodes);
• t : Periodic time for updating;
• Traf: Traffic factor Traffic factor represents the number of packets to be delivered. This parameter depends on both n as and the involved network application. Generally this parameter is proportional to the arrival rate (for each node); therefore, it holds O (λ·n) complexity.
Using the two cost measure formulas, we determine the expression of t when two approaches have the same cost value (i.e.  ):
):
 (3)
(3)
Equation (3) shows that t depends on the amount of generated network traffic. If the network topology changes * (due to high terminal mobility) faster than the rate of data generation, the use of an “on-demand” protocol is preferable. On the other hand, when the rate of data generation is low, a table-driven protocol is much more desirable.
Notice that, at a very first glance, our cost analysis suggests a simple, interesting alternative approach for protocol selection. Unfortunately, this protocol cost analysis is clear superficial without taking into account specific details of each routing algorithm. For example, a cost analysis of AODV should distinguish between packets that use discovered paths or new paths. Clearly the cost of using new paths is higher. Moreover, there is a high probability that packets would use existing paths (sending large files for example).
4. Protocol Comparison
For network design, a good protocol is the one that best suitable to network scenario. For example, Perkins [18] compared two routing protocols: DSR and AODV. They have similar routing mechanisms because both belong to the on-demand routing category. However, according to the study, AODV shows better performances when the network density is high while DSR present outstanding performances for relatively small networks.
In the literature, there is lot of research work focusing on comparison between pro-active and re-active routing protocols. Here we make use of the cost analysis developed in Section 3 to study and analyze some simulation results reported in the literature. We follow the similar procedure adopted by most research work, using AODV and OLSR representing “on-demand” and “table-driven” protocols, respectively. We will also introduce an interesting compartment between two packet distribution types (CBR and VBR). The comparisons between two routing protocols were performed in terms of following metrics:
1) Network density—number of terminals;
2) Routing overhead—number of control packets needed to be sent for normal operation of the protocol;
3) Routing overhead—ration between control and data packets;
4) Burst time—the average time between two packet traffic bursts on observe in a determined simulation experiment;
5) End to end delay—average time for a packet arriveing at the destination from the source node;
6) Delivery ratio—percentage of packets that indeed arrived at the destination;
Herri et al. [19] studied a vehicular ad-hoc network composed of high mobility terminals. Interesting enough, the observed simulation results for AODV and OLSR routing protocol are similar to the results derived from our theoretical cost analysis (Section 3) in terms of routing overhead. In other words, the simulation results also show a balance point (where both proactive and reactive protocols present the same efficiency (routing overhead) in terms of two metric measures: CBR data generation rate (Figure 2) and nodes density (Figure 3).
Routing Overhead vs. Data Generation. This graph describes the amount of control packets sent by the routing algorithm. We can see that OLSR protocol is much more stable than AODV. AODV grows logarithmically with data traffic. Notice that a balance point occurs around 10−0.5 Mb (30 kB). We can say that for data rate lower than 30 kB—the AODV (on-demand) protocol is more efficient than the OLSR (table driven). For higher bit rates the use of OLSR is preferable because AODV becomes less competitive due to the fast growing of number of control packages. This phenomenon is also
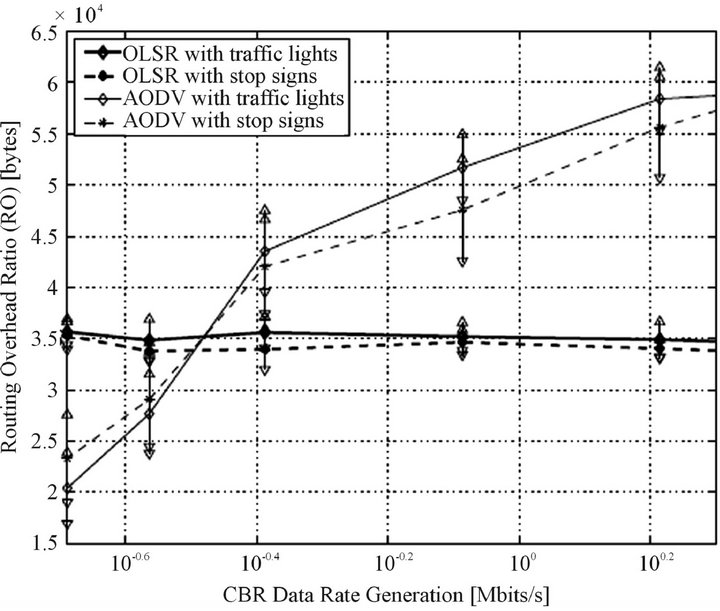
Figure 2. CBR data rate generation x routing overhead ratio [19].
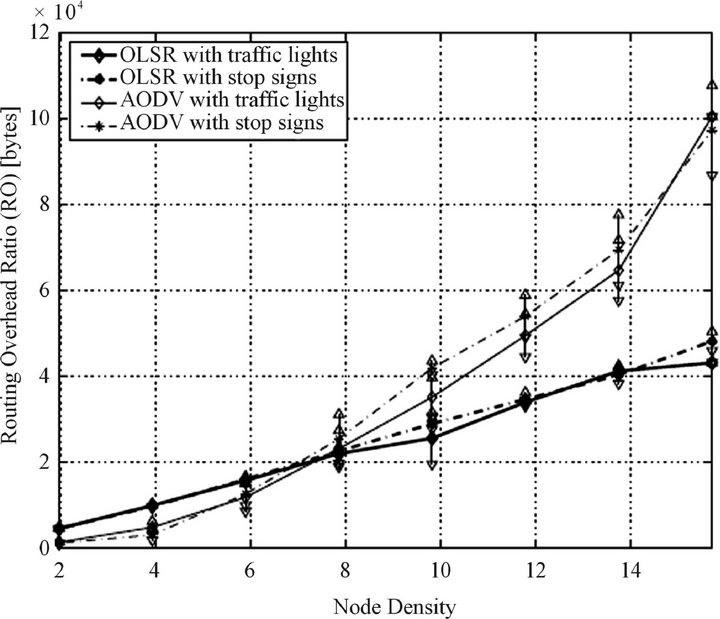
Figure 3. Node density x routing overhead ratio [19].
observed by theoretical cost analysis in Section 3.
Routing Overhead vs. Node Density. Similarly, according to Figure 3, the graph also presents a balance point (around node density of 7 nodes). Beyond this point the efficiency of the protocols diverges. In other words, OLSR becomes more efficient than AODV Notice that the routing overhead of AODV grows exponentially in terms of node density while that of OLSR varies linearly.
There search results reported by [19] clearly suggest the possibility of plausible application of balance points for protocol type selection. For instance, up to 30 Kbps data rate and network density of 7 nodes, “on-demand” protocols should be selected. Beyond these two quantity (more than 30 Kbps and more than 7 nodes), a tabledriven protocol become a better candidate.
VBR and CBR
In this section we compile and compare the study results and performances of AODV and OLSR routing protocols under different profiles of data traffic flows. Our work is based on two research papers: 1) Gowrishankar et al. [20] studies two routing protocols for CBR (Constant Bit Rate) data traffic flows over the links, and 2) Kumer et al. carried out the investigation for VBR (Variable Bit Rate) data traffic flows [21]. Under CBR encoding, the bit rate is kept constant across the entire data file, as well as for any other application source.
Figure 4 shows the performance of AODV and OLSR routing protocols in terms of percentage of success delivery observed for different network densities. Accordingly, both routing protocols exhibit superior performances with CBR traffic in comparison with VBR data traffic. Two types of traffic, for the two types of protocols, we observed that the CBR traffic show better result both for OLSR and AODV, in relation the VBR traffic. This result is intuitively plausible because networks is less
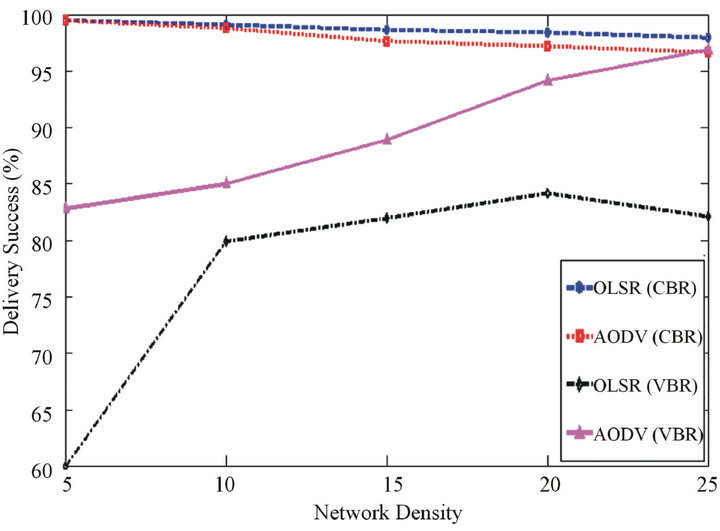
Figure 4. Network density x delivery success (%).
disturbed with CBR data traffic than burst nature of VBR flow and consequently paths under CBR flows have low change frequency and less message packets are needed for path maintenance.
For CBR traffic, Figure 4 also shows that OLSR routing protocol reacts better as network density grows. This result is by no mean surprising due to the real virtue of routing tables. We find that CBR traffic is less productive on AODV (we see that AODV curve is lower than OLSR). We explain this performance due to the calm behavior of the CBR—since data is generally sent on the same rate, we have links that are not in use for a long time. Therefore, according to AODV protocol, those routes are deleted from the routing tables. This observation causes new packets to be sent on a route discovery mode which increase control messages. Finally, that causes delivery failure.
For VBR traffic we find that AODV perform is much better than OLSR. The on-demand property of AODV attenuates easily the burst nature of VBR. When traffic arrives in bursts—AODV would operate route discovery for the first packet. Hence, the rest of the load (of the same burst) would follow the same path. Consequentlythere is non-increasing of control load (no new route discovery is needed). On the other hand, OLSR continuesinsist in keeping the same routing tables even when only few routes (burst routes) are in fact used for transmission.
We find that OLSR under VBR traffic providethe poorest performance. Currently we do not have good arguments to explain this result.
Figure 5 shows the relationship between network density vs. end-to-end delay. We can see that the performance of the routing protocols is superior for CBR traffic. For VBR traffic, there is no evidence about the superiority of any routing protocol. But, we network size grows large, OLSR offer less end-to-end delay.
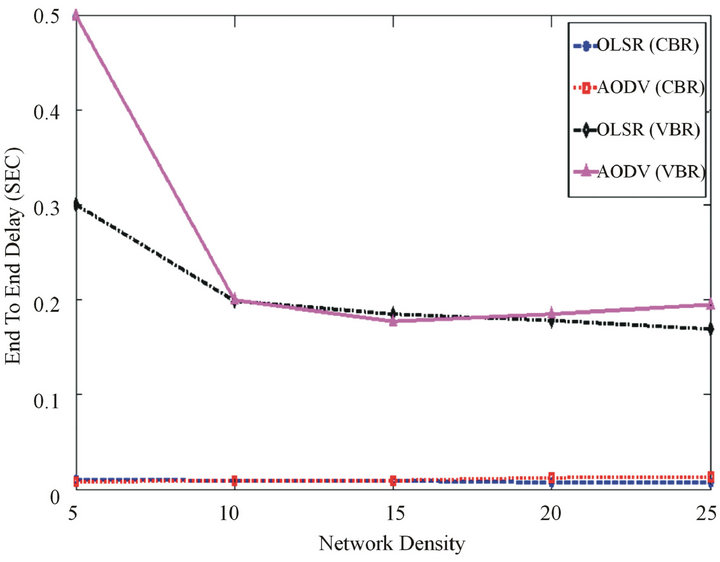
Figure 5. Network densities x end to end (sec).
5. Conclusions
One of the advantages of proactive protocols on adhoc—networks (OLSR, for example) is no need for central management to handle the routing process, in contrast to regular and almost permanent routing tables required by those table driven protocols.
Because of its distributed protocol management and using flooding mechanism to update its routing table, the protocols consume a part of link or network bandwidth for controlling message delivery (decreasing of throughput).
Although we discuss and compare advantages and disadvantages of different protocol types. There is no final word about the selection of protocols. However, we do show that the performance of protocols depends on many parameters like: Networks density, Nodes mobility, Burst time, Link types (VBR/CBR). These parameters need to be taken into account in order to develop a more accurate evaluation formula better than those given by Equations (1) and (2). We also realize that network performance is closely related to its use, that is, the kind of network applications. At least here we can conclude is the following: On-demand protocols can be highly interesting if a network is mainly broadcasting one. In this case, on-demand protocols can provide higher throughput.
6. Future Work
As presented in Section 3, our approach can be viewed as a first step towards more comprehensive performance evaluation of table-driven protocols vs. on-demand. We intend to precede our analysis involving more network parameters (in addition to those used in this work: network density, burst time, end to end delay, routing overhead, delivery ration) such as:
1) Hot links—pairs of terminals that constantly transfer data rate throughout the simulation. Data could be delivered on the same route or on parallel routes (e.g. when terminals are lost).
2) Generation rate—becomes a variable according to the formula we presented on Section 3. Moreover, as mentioned before, new parameters needed to be taken into account in order to develop a more accurate evaluation formula better than those given by Equations (1) and (2).
3) Rates for using hot-links or sporadic transmission.
REFERENCES
- http://www.ietf.org/
- C. E. Perkins and P. Bhagwat, “Highly Dynamic Destination-Sequenced Distance-Vector Routing (DSDV) for Mobile Computers,” Proceedings of the Conference on Communications Architectures, Protocols and Applications, Vol. 24, No. 4, 1994, pp. 234-244. doi:10.1145/190314.190336
- C. Maihofer, “A Survey of Geocast Routing Protocols,” IEEE Communications Surveys & Tutorials, Research & Technology (RIC/TC), Vol. 6, No. 2, 2004, pp. 32-42.
- S. Ratnasamy, “Capturing Complexity in Networked Systems Design: The Case for Improved Metrics,” 2006.
- M. S. Corson and A. Ephremides, “A Distributed Routing Algorithm for Mobile Wireless Networks,” Wireless Networks, Vol. 1, No. 1, 1995, pp. 61-81. doi:10.1007/BF01196259
- E. M. Gafni and D. P. Bertsekas, “Distributed Algorithms for Generating Loop-Free Routes in Networks with Frequently Changing Topology,” IEEE Transactions on Communications, Vol. 29, No. 1, 1981, pp. 11-18. doi:10.1109/TCOM.1981.1094876
- E. M. Royer and C. K. Toh, “A Review of Current Routing Protocols for Ad Hoc Mobile Wireless Networks,” IEEE Personal Communications, Vol. 6, No. 2, 1999, pp 46-55. doi:10.1109/98.760423
- G. Jayakumar and G. Ganapathy, “Performance Comparison of Mobile Ad-hoc Network Routing Protocol,” International Journal of Computer Science and Network Security, Vol. 7 No. 11, 2007, pp. 77-84.
- J. Raju and J. J. Garcia-Luna-Aceves, “A Comparison of On-Demand and Table-Driven Routing for Ad-Hoc Wireless Networks,” IEEE International Conference on Communications, Vol. 3, New Orleans, 18-22 June 2000, pp. 1072-1706.
- A. Huhtonen, “Comparing AODV and OLSR Routing Protocols,” Heleniski University of Technology, Espoo, 2004.
- C. E. Perkins and E. M. Royer, “Ad-Hoc On-Demand Distance Vector Routing,” Proceeding of the 2nd IEEE Workshop on Mobile Computing Systems and Applications, New Orleans, 25-26 February 1999, pp. 90-100. doi:10.1109/MCSA.1999.749281
- Y. C. Hu and D. B. Johnson, “Implicit Source Routes for On-Demand Ad Hoc Network Routing,” Proceedings of the 2001 ACM International Symposium on Mobile Ad Hoc Networking & Computing (MobiHoc 2001), Long Beach, May 2001, pp. 1-10.
- V. D. Park and M. S. Corson, “A Highty Adaptative Distributed Routing Algorithm for Mobile Wireless Network,” Proceeding of IEEE INFOCOM’97, 6th Annual Joint Conference of the IEEE Computer and Communications Societies. Driving the Information Revolution, April 1997, p. 1405.
- C. K. Toh, “A Novel Distributed Routing Protocol to Support Ad hoc Mobile Computing,” IEEE 15th Annual International Phoenix Conference on Computers and Communications, Phoenix, 27-29 March 1996, pp. 480- 486.
- R. Dube, C. D. Rais, K. Y. Wang and S. K. Tripathi, “Signal Stability-Based Adaptive Routing (SSA) for Ad-Hoc Mobile Networks,” IEEE Personal Communications, Vol. 4, No. 1, 1997, pp. 36-45. doi:10.1109/98.575990
- S. Murthy and J. J. Garcia-Luna-Aceves, “An Efficient Routing Protocol for Wireless Networks,” Journal of Mobile Networks and Applications. Routing in Mobile Communications Networks, Vol. 1, No. 2, 1996, pp 183- 197. doi:10.1007/BF01193336
- C. C. Chiang, H. K. Wu, W. Liu and M. Gerla, “Routing in Clustered Multihop, Mobile Wireless Networks with Fading Channel,” IEEE Singapore International Conference on Networks, October 1997, pp. 197-211.
- C. Perkins, E. B. Royer and S. Das, “Ad-Hoc On-Demand Distance Vector (AODV) Routing,” RFC 3561 IETF Network Working Group, 2003.
- J. Haerri, F. Filali and C. Bonnet, “Performance Comparison of AODV and OLSR in VANETs Urban Environments under Realistic Mobility Patterns,” The 5th IFIP Mediterranean Ad Hoc Networking Workshop, June 2006, pp. 14-17.
- S. Gowrishankar, T. G. Basavaraju, M. Singh and S. K. Sarkar, “Scenario Based Preformance Analysis of AODV and OLSR in Mobile and Ad-hoc Networks,” The 24th South East Asia Regional Computer Conference, November 2007, pp. 8.1-8.6.
- A. B. R. Kumer, L. C. Reddy and P. S. Hiremath, “Performance Comparison of Wireless Mobile Ad-Hoc Network Routing Protocol,” International Journal of Computer Science and Network Security, Vol. 8 No. 6, 2008, pp. 337-343.