Paper Menu >>
Journal Menu >>
 Intelligent Information Management, 2009, 1, 73-80 doi:10.4236/iim.2009.12012 Published Online November 2009 (http://www.scirp.org/journal/iim) Copyright © 2009 SciRes IIM Solving Linear Systems via Composition of their Clans Dmitry A. ZAITSEV Odessa National Telecommunication Academy, Kuznechnaya, Odessa, Ukraine Email: zaitsev_dmitry@mail.ru Abstract: The decomposition technique for linear system solution is proposed. This technique may be com- bined with any known method of linear system solution. An essential acceleration of computations is ob- tained. Methods of linear system solution depend on the set of numbers used. For integer and especially for natural numbers all the known methods are hard enough. In this case the decomposition technique described allows the exponential acceleration of computations. Keywords: linear system, decomposition, clans, acceleration of computation 1. Introduction The task of linear system solution is a classical task of linear algebra [10]. There are a variety of known meth- ods for linear system solution. It should be noted that the choice of the method depends essentially on the set of numbers used. More precise it depends on the algebraic structure of the variables and coefficients. The solution of system in fields and bodies, for example, in rational or real numbers is the most studied. These algebraic struc- tures allow the everywhere defined operation of division. It is convenient to develop the simple and powerful methods. Precise and approximate methods are distin- guished. The most popular is Gauss method consisting in consequent elimination of variables and obtaining the triangular form of the matrix. Ring algebraic structures such as integer numbers re- quire special methods, as the division is not the every- where-defined operation in a ring. There is known the universal method using unimodular transformations of matrix to obtain Smith normal form [10]. Result matrix has diagonal form and allow the simple representation of solutions. Unfortunately this method is exponential. Up to present time were suggested a few more complex but polynomial methods [3,7,8]. The most interesting is founded on consequent solution of system in the classes’ fields of deductions modulo of prime numbers to con- struct a target general integer solution of the system [3]. The development of such areas of computer science as Petri net theory [6,13], logic programming [5], artificial intellect [1] require to solve integer systems over the set of nonnegative integer numbers. Notice that nonnegative integer numbers form algebraic structure of monoid. In monoid even the operation of subtraction is not every- where defined. All the known methods of integer system solution in nonnegative integer numbers are exponential [2,4,9,12]. It makes significant difficulties in the applica- tion of these methods to real-life systems analysis. For example, if the complexity of method is about 2 q , where q is the dimension of the system, then to solve the system with dimension 100 it is required about 30 10 operations. A computer with the performance 9 10 op- erations per second will have executed this job in 21 10 seconds or in about 13 10 years. Therefore, the task of the effective methods develop- ment for linear system solution, especially in nonnega- tive numbers, is enough significant. The goal of present paper is to introduce the decomposition technique of linear system solution. Application of this technique al- lows an essential acceleration of computations. In the case the exponential complexity of the source method of system solution the acceleration is exponential too. 2. Basic Concepts Let us consider a homogeneous linear system 0 Ax ⋅= (1) where A is the matrix of coefficients with dimension of mn × and x is the vector-column of variables with dimension of n . So we have the system of m equa- tions with n unknowns. We do not define now more precisely the sets of variables and coefficients. We sup- pose only that there is a method to solve a system (1) and to represent the general solution in the form xyG =⋅ (2) where matrix G is the matrix of basis solutions and y  D. A. ZAITSEV Copyright © 2009 SciRes IIM 74 is the vector-row of independent variables. Each row of matrix G is a basis solution. To generate a particular solution of system the values of components of vector y may be chosen arbitrarily with respect to the set of values of variables x . It should be noted that system (1) has always at least the trivial zero solution. For the brev- ity we shall name further homogeneous system an incon- sistent in the case it has only the trivial solution. Let us consider a nonhomogeneous system Axb ⋅= (3) where b is the vector-column of free elements with dimension of m . We suppose also that there is a method to solve the system (3) and to represent the general solu- tion in the form xxyG ′ =+⋅ (4) where yG ⋅ is the general solution of corresponding homogenous system (1) and x ′ is the minimal particu- lar solution of the nonhomogeneous system (3). According to classical algebra [10], results represented above are true for arbitrary fields and rings. Moreover, according to [4], they are true also for monoid solutions with a ring structure of matrix A and vector b . In this case the set of minimal solutions x ′ of nonhomogene- ous system should be used. 3. Decomposition of System Let us decompose the system (1) of homogeneous equa- tions 0 Ax ⋅= Above system may be considered as the predicate 12 ()()()...() m LxLxLxLx =∧∧∧ (5) where () i Lx are the equations of the system: ()(0) i i Lxax =⋅= and i a is the i-th row of the matrix A . We imply that i a is a nonzero vector so at least one component of i a is nonzero. Moreover, we shall denote as X the set of variables of system. Let us consider the set of equations {} i L ℑ= of sys- tem L . We shall introduce relations over the set ℑ . Definition 3.1. Near relation: two equations , ij LL ∈ℑ are near and denoted as ij LL o if and only if k xX ∃∈ : ,, ,0 ikjk aa ≠ , ,, ()() ikjk signasigna=. Lemma 3.1. Near relation is reflexive and symmetric. Proof. a) Reflexivity: ii LL o . As i a is a nonzero vector so there exists k xX ∈ : , 0 ik a ≠ . Then it is trivial that ,, ()() ikik signasigna =. b) Symmetry: ijji LLLL ⇒ oo . It is symmetric ac- cording to symmetry of equality sign: ,,,, ()()()() ikjkjkik signasignasignasigna =⇒=. For each equation chosen we may construct the set of near equations. It is useful to consider the transitive clo- sure of near relation. We introduce the special notation for this transitive closure. Definition 3.2. Clan relation: two equations , ij LL ∈ℑ belong to the same clan and are denoted as ij LL o if and only if there exists a sequence (may be empty) of equations 12 ,,..., k lll LLL such that: 1... k illj LLLL oooo . Theorem 3.1. Clan relation is the equivalence rela- tion. Proof. We have to prove that relation above is reflex- ive, symmetric and transitive. We shall implement this in a constructive way. a) Reflexivity: ii LL o . As Definition 3.2 allows the empty sequence and near relation is reflexive ac- cording to Lemma 3.1, so clan relation is reflexive. b) Symmetry: ijji LLLL ⇒ oo . As ij LL o , so, according to Definition 3.2, we may construct the se- quence 12 ,,..., k lll LLL such as 1... k illj LLLL oooo . Since near relation is symmetry according to Lemma 3.1, we may construct the reversed sequence 11 ,,..., kk lll LLL −such as 1 ... k jlli LLLL oooo , then ji LL o . c) Transitivity: , ijjlil LLLLLL ⇒ ooo . As ij LL o , jl LL o , so, according to Definition 3.2, we may construct two sequences 12 ,,..., k iii LLL σ=and 12 ,,..., r lll LLL ς=such that 1...k iiij LLLL oooo and 1... r jlll LLLL oooo . Let us consider the concatenation j L σς . This sequence connects the elements i L and l L with the chain of elements satisfying the near relation. Thus il LL o . Corollary. Clan relation defines the partition of the set ℑ : j j C ℑ= U , ij CC =∅ I , ij ≠ . Definition 3.3. Clan: element of the partition {, } ℑ o will be named a clan and denoted j C . The variables , (){,:0} jjj iikki XXCxxXLCa ==∈∃∈≠ will be named variables of clan j C . Definition 3.4. Internal variable: variable () j i xXC ∈ is an internal variable of the clan j C if and only if for  D. A. ZAITSEV Copyright © 2009 SciRes IIM 75 all the other clans l C , lj ≠ it is true l i xX ∉. The set of internal variables of clan j C we shall denote as j X ) . Definition 3.5. Contact variable: variable i xX ∈ is a contact variable if and only if clans j C and l C exist such as j i xX ∈, l i xX ∈. The set of all the contact variables we shall denote as 0 X . We shall also denote the set of contact variables of clan j C as j X ( so jjj XXX = )( U and jj XX =∅ )( I . Lemma 3.3. An arbitrary contact variable 0 i xX ∈ cannot appear in different clans with the same sign. Proof. We shall assume the contrary. Let variable * i xX ∈ appears in different clans 12 ,,..., k j jj CCC with the same sign, where 1 k > . Thus, according to Defini- tion 3.3, equations 1 1 j l LC ∈, 2 2 j l LC ∈,… , k k j l LC ∈ exist such as 1, 0 li a ≠ , 2, 0 li a ≠ ,…, , 0 k li a ≠ and 12 ,,, ()()...() k liliii signasignasigna=== . Then, according to Definitions 3.2 and 3.3, equations 12 ,,..., k lll LLL be- long to the same clan. So we have obtained the contra- diction. Lemma 3.4. An arbitrary contact variable 0 i xX ∈ belongs to two clans exactly. Proof. We shall implement the proof from the contrary. Let us assume that a contact variable i xX ∈ belongs to q different clans and 2 q ≠ . We shall consider sepa- rately two cases: a) 2 q < . Than, according to Definition 3.5, variable i x is not a contact variable. b) 2 q > We have contradiction with Lemma 3.3 so there are only two signs: plus and minus. Corollary. An arbitrary contact variable 0 i xX ∈ is contained in different clans with opposite signs. Definition 3.6. Clan j C will be named an input clan of the contact variable 0 i xX ∈ and denoted as () i Ix if and only if it contains this variable with the sign plus. Definition 3.7. Clan j C will be named an output clan of the contact variable 0 i xX ∈ and denoted as () i Ox if and only if it contains this variable with the sign mi- nus. It should be noted that analogous classification into input and output might be introduced for the contact variables of the clan. Thus we have obtained on the one hand the partition of equations into clans and on the other hand the parti- tion of variables into internal and contact. Let us make a new enumeration of equations and variables. The enu- meration of equations we start from the equations of the first clan and so on up to the last clan. The enumeration of variables we start from the contact variables and than continue with internal variables of clans in ascending order. Then we order sets X and ℑ according to the new enumeration. As a result we obtain a block form of matrix A : 0,11 0,22 0, 000 000 000 kk AA AA A AA = ) ) MMMMM ) With respect to clans and subsets of variables it may be more convenient to represent the matrix in Table 1. Let us consider more detailed the structure of matrixes for the contact variables. According to Definition 3.5, j X ( denotes the contact variables of the clan j C . Then we have 0 j j XX = ( U but this is not a partition of the set 0 X as each contact variable 0 i xX ∈, according to Lemma 3.4, belongs to two clans exactly. Further we shall use matrixes j A ( also. Notice that unlike of 0, j A that contains values for all contact places 0 X the ma- trix j A ( contains values only for contact variables j X ( of the clan j C . In other words the matrix j A ( contains only nonzero columns of the matrix 0, j A . As a result of Lemma 3.4 application to matrix A we conclude that each contact variable 0 i xX ∈ appears in Table 1. The block structure of the system matrix Clan/Variables 0 X 1 X ) 2 X ) . . . k X ) 1 C 0,1 A 1 A ) 0 . . . 0 2 C 0,2 A 0 2 A ) . . . 0 . . . . . . . . . . . . . . . . . . k C 0, k A 0 0 . . . k A )  D. A. ZAITSEV Copyright © 2009 SciRes IIM 76 two of matrixes 0, j A , 1, jk = exactly and besides, it appears in one matrix with positive coefficients and in another matrix with negative coefficients. 4. Solution of Decomposed System At first we shall solve the system separately for each clan. If we consider only variables of the clan we have the system 0 jj Ax ⋅= (6) where , j jjjj j x AAAx x == ( () ) . System (6) will be denoted also as () j C Lx . Notice that values of variables \ j XX may be chosen arbitrar- ily. More detailed ()() & j j l C l LC LxLx ∈ = Theorem 4.1. If system (1) has a nontrivial solution then each system (6) has a nontrivial solution. Proof. Let us consider the representation (5) of the system (1). As, according to Theorem 3.1, clan relation defines a partition of the set of equations, so representa- tion (5) may be written in the form 12 ()()()...() k CCC LxLxLxLx =∧∧∧ (7) Thus, an arbitrary solution of (1) is the solution of each system (6). Corollary. If at least one of systems (6) is inconsistent then the entire system (1) is inconsistent. Let us the general solution of the system (6), accord- ing to (2), has the form jjj xyG =⋅ As each j i xX ∈ ) is contained exactly in one system (6), so for all the internal variables of clans we have jjj xyG =⋅ ) ) Each contact variable, according to Lemma 3.4, be- longs to two systems exactly. Thus, its values have to be equal or jljjll iiii xxyGyG =⋅=⋅ , where j i G denotes the column of matrix j G corre- sponding to variable i x . Therefore, we obtain the system 0 ,1,, ,,(),(). jjj jjlljl iiiii xyGjk yGyGxXCOxCIx =⋅= ⋅=⋅∈== (8) Theorem 4.2. System (8) is equivalent to the system (1). Proof. As Expression (7) is the equivalent representa- tion of the source system (1) and there is a partition of the set of variables X into contact and internal, so above reasoning proves the theorem. Let us consider more detailed the equations of system (8) for the contact variables. Equation jjll ii yGyG ⋅=⋅ may be represented in a block form as 0 j jl i l i G yy G ⋅= − We enumerate all the variables j y in such a manner to obtain the joint vector 12 ... k yyyy = and assemble j i G , l i G into the joint matrix F . Thus, we obtain the system 0 yF ⋅= or 0 TT Fy ⋅= .(9) System obtained has the form (1) so the general solu- tion of system has the form (2): yzR =⋅ (10) Let us compose the joint matrix G of systems’ (6) solutions for all the clans in such a manner that xyG =⋅ (11) This matrix has a block structure as follows 11 22 000 000 000 kk SG SG G SG = ) ) MMMMM ) The structure of the first column of above block rep- resentation that corresponds to contact variables is com- plex enough. For each contact variable 0 i xX ∈ we cre- ate the column so that either block j S or l S contain nonzero elements according to j G ( or l G ( where () j i COx =, () l i CIx =. Really, as a contact variable belong to two clans, so its value may be calculated either according to general solution of input clan or according to general solution of output clan. Let us substitute (10) into (11): xzRG =⋅⋅ Therefore xzH =⋅ , HRG =⋅ , (12) Theorem 4.3. Expressions (12) represent the general 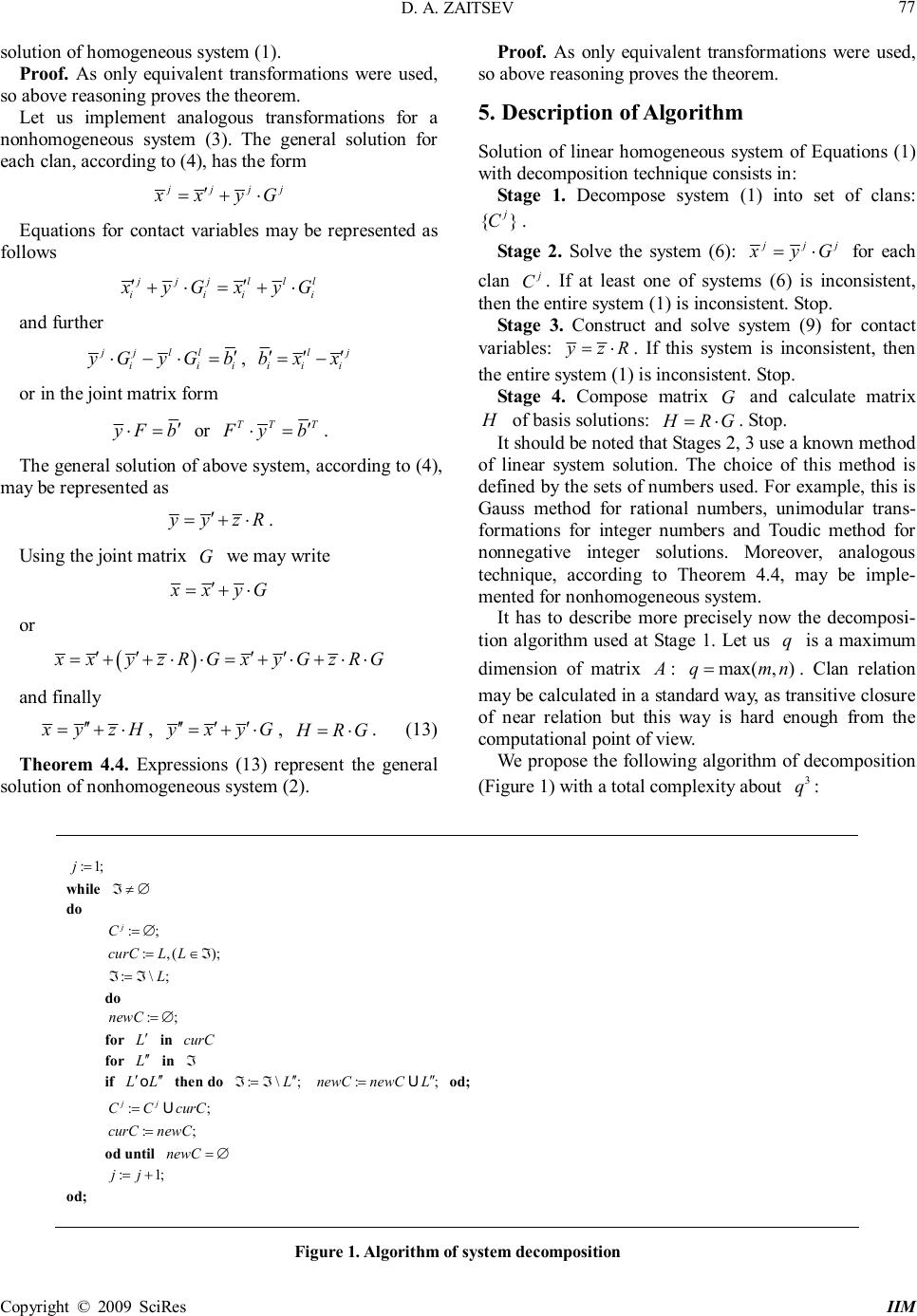 D. A. ZAITSEV Copyright © 2009 SciRes IIM 77 solution of homogeneous system (1). Proof. As only equivalent transformations were used, so above reasoning proves the theorem. Let us implement analogous transformations for a nonhomogeneous system (3). The general solution for each clan, according to (4), has the form jjjj xxyG ′ =+⋅ Equations for contact variables may be represented as follows jjjlll iiii xyGxyG ′′ +⋅=+⋅ and further jjll iii yGyGb ′ ⋅−⋅= , lj iii bxx ′′′ =− or in the joint matrix form yFb ′ ⋅= or TTT Fyb ′ ⋅=. The general solution of above system, according to (4), may be represented as yyzR ′ =+⋅ . Using the joint matrix G we may write xxyG ′ =+⋅ or ( ) xxyzRGxyGzRG ′′′′ =++⋅⋅=+⋅+⋅⋅ and finally xyzH ′′ =+⋅ , yxyG ′′′′ =+⋅ , HRG =⋅ . (13) Theorem 4.4. Expressions (13) represent the general solution of nonhomogeneous system (2). Proof. As only equivalent transformations were used, so above reasoning proves the theorem. 5. Description of Algorithm Solution of linear homogeneous system of Equations (1) with decomposition technique consists in: Stage 1. Decompose system (1) into set of clans: {} j C . Stage 2. Solve the system (6): jjj xyG =⋅ for each clan j C . If at least one of systems (6) is inconsistent, then the entire system (1) is inconsistent. Stop. Stage 3. Construct and solve system (9) for contact variables: yzR =⋅ . If this system is inconsistent, then the entire system (1) is inconsistent. Stop. Stage 4. Compose matrix G and calculate matrix H of basis solutions: HRG =⋅ . Stop. It should be noted that Stages 2, 3 use a known method of linear system solution. The choice of this method is defined by the sets of numbers used. For example, this is Gauss method for rational numbers, unimodular trans- formations for integer numbers and Toudic method for nonnegative integer solutions. Moreover, analogous technique, according to Theorem 4.4, may be imple- mented for nonhomogeneous system. It has to describe more precisely now the decomposi- tion algorithm used at Stage 1. Let us q is a maximum dimension of matrix A : max(,) qmn =. Clan relation may be calculated in a standard way, as transitive closure of near relation but this way is hard enough from the computational point of view. We propose the following algorithm of decomposition (Figure 1) with a total complexity about 3 q : :1; j = while ℑ≠∅ do :; j C =∅ :,(); curCLL =∈ℑ :\; L ℑ=ℑ do :; newC =∅ for L ′ in curC for L ′′ in ℑ if LL ′′′ o then do :\; L ′′ ℑ=ℑ :; newCnewCL ′′ = U od; :; jj CCcurC = U :; curCnewC = od until newC =∅ :1; jj =+ od; Figure 1. Algorithm of system decomposition  D. A. ZAITSEV Copyright © 2009 SciRes IIM 78 It creates clans j C out of the source set of equations ℑ of the system. To create the transitive closure the algorithm compares each equation of the set curC with each equation of ℑ . Equations included into current clan are extracted from the set ℑ . The usage of two auxiliary subsets curC and newC allow the once comparison of each pair of equations. As the calculation of near relation is linear, so the total complexity of the algorithm is about 3 q . Let us () Mq is the time complexity of solution for linear system of size q . We shall estimate the total complexity of linear system solution with decomposition technique. Let us the source system (1) is decomposed in k clans and p is the maximal number of either con- tact or clans’ internal variables. Thus (1) qkp ≤+⋅ . The following expression estimates the complexity of system solution with decomposition technique: 33 ()((1))()()((1)) VqkpkMpMpkp ≤+⋅+⋅+++⋅ . Each of four addends of this expression estimates the complexity of the corresponding stage. In more simplified form it is represented as 3333 ()2(1)(1)()() VqkpkMpkpkMp ≈⋅+⋅++⋅≈⋅+⋅ . Let us estimate the acceleration of computations under the decomposition technique usage. The target expres- sion is 33 () () () Mq Accq kpkMp =⋅+⋅ It is enough clear that even for polynomial methods of system solution with a degree higher than 3 we obtain acceleration greater than one. Now we estimate the ac- celeration for exponential methods with complexity ()2 q Mq = such, for example, as Toudic method [9,12]. 33 22 ()2 22 qq qp pp AccEq kpk − =≈= ⋅+⋅ . The acceleration obtained is exponential. It is good enough result. 6. Example Let us solve the homogeneous system (1) of 9 equations with 10 variables. The matrix of the system is as follows 1020011000 1000011000 0011020010 0011000010 0100001100 0100001102 0000100211 0000100011 0001100000 A −− −− −− −− =−− −− −− −− − Stage 1. Decomposition. Above system is decomposed into two clans 1 1256 {,,,} CLLLL =, 2 34789 {,,,,} CLLLLL =. It has the following subsets of clans’ variables 1 36810127 {,,,,,,} Xxxxxxxx =, 2 36810459 {,,,,,,} Xxxxxxxx =, contact variables 012 36810 {,,,} XXXxxxx === (( and internal variables 1 127 {,,} Xxxx = ) , 2 459 {,,} Xxxx = ) . According to new enumeration of variables ( ) 36810127459 nx = and new enumeration of equations ( ) 125634789 nL = the matrix A has the form 2100101000 0100101000 0010011000 0012011000 1200000101 1000000101 0021000011 0001000011 0000000110 A −− −− −− −− = −− −− −− −− − Stage 2. Solution of systems for clans. Application of Toudic method gives us the following matrixes of basis solutions for clans: 1 1100011 0011010 0000111 G=,  D. A. ZAITSEV Copyright © 2009 SciRes IIM 79 2 1111001 0000111 G= with respect to vectors of free variables 1111 123 (,,) yyyy = and 222 12 (,) yyy = correspondingly. Stage 3. Solution of system for contact variables. The system for contact variables has the form: 12 11 12 11 12 21 12 21 0, 0, 0, 0. yy yy yy yy −= −= −= −= It should be noted that equations correspond to contact variables 36810 ,,, xxxx and first and second equations coincide as well as third and fourth. The general solution of this system is 11010 00100 00001 R= Stage 4. Composition of target solution. As it was mentioned in section 4, matrix G may be composed in different ways. Two variants of this matrix are repre- sented as follows 1100011000 0011010000 0000111000 0000000001 0000000111 G= or 0000011000 0000010000 0000111000 1111000001 0000000111 G= . And finally the result matrix of basis solutions of the system (1) has the form 1111021001 0000111000 0000000111 HRG=⋅= . The result obtained coincides with the basis solutions calculated in usual manner with Toudic method. 7. Conclusions Present paper introduced new technique of linear system solution with decomposition into clans. It is efficient in the combination with methods of system solution more hard than a polynomial of third degree and in the case the system may be decomposed in more than one clan. As a result of this technique application to various matrixes it may be concluded that a good opportunity to decomposition have sparse matrixes. This is realistic enough situation as large-scale real-life models contain well-localized interconnections of elements. It should be noted also the relationship of technique proposed with the decomposition of Petri nets [11]. We may construct the matrix of directions D for an arbi- trary matrix A of linear system as () DsignA =. Ma- trix D may be considered further as incidence matrix of Petri net. The most significant acceleration of computations was obtained for Diophantine (integer) systems especially solving over the set of nonnegative numbers. There are only exponential methods for solution of such systems. In this case the acceleration of computation obtained is exponential. REFERENCES [1] F. Baader and J. Ziekmann, “Unification theory,” Hand- book of logic in artificial intelligence and logic pro- gramming, Oxford: Univ. Press, pp. 1–85, 1994. [2] E. Contejan and F. Ajili, “Avoiding slack variables in solv- ing linear Diophantine equations and inequations,” Theo- retical Computer Science, Vol. 173, pp. 183–208, 1997. [3] M. A. Frumkin, “Algorithm of system of linear equations solution in integer numbers,” Research on Discrete Opti- misation, Moskow, Nauka, pp. 97–127, 1976. [4] S. L. Kryviy, “Methods of solution and criteria of com- patibility of systems of linear Diophantine equations over the set of natural numbers,” Cybernetics and Systems Analysis, Vol. 4, pp. 12–36, 1999. [5] J. Lloyd, “Foundation of logic programming,” Berlin, Springer-Verlag, 1987. [6] T. Murata, “Petri nets: Properties, analysis and applica- tions,” Proceedings of IEEE, Vol. 77, No. 4, pp. 541–580 1989. [7] L. Pottier, “Minimal solutions of linear diophantine sys- tems: bounds and algorithms,” Proceedings of the Fourth Intern. Conference on Rewriting Technique and Applica- tion, Como, Italy, pp. 162–173, 1991. [8] J. F. Romeuf, “A polynomial algorithm for solving sys- tems of two linear Diophantine equations,” Theoretical Computer Science, Vol. 74, No. 3, pp. 329–340, 1990. [9] J. M. Toudic, “Linear algebra algorithms for the structural analysis of petri nets,” Rev. Tech. Thomson CSF, Vol. 14, No. 1, pp. 136–156, 1982. [10] B. L. Van Der Warden, Algebra, Berlin, Heidelberg,  D. A. ZAITSEV Copyright © 2009 SciRes IIM 80 Springer-Verlag, 1971. [11] D. A. Zaitsev, “Subnets with input and output places,” Petri Net Newsletter, Vol. 64, pp. 3–6, 2003. [12] D. A. Zaitsev, “Formal grounding of toudic mmethod,” Proceedings of the 10th Workshop “Algorithms and Tools for Petri Nets”, Eichstaett, Germany, pp. 184–190, Sep- tember 26-27, 2003. [13] D. A. Zaitsev and A. I. Sleptsov, “State equations and equi- valent transformations of timed petri nets,” Cybernetics and System Analysis, Vol. 33, No. 5, pp. 659– 672, 1997. |