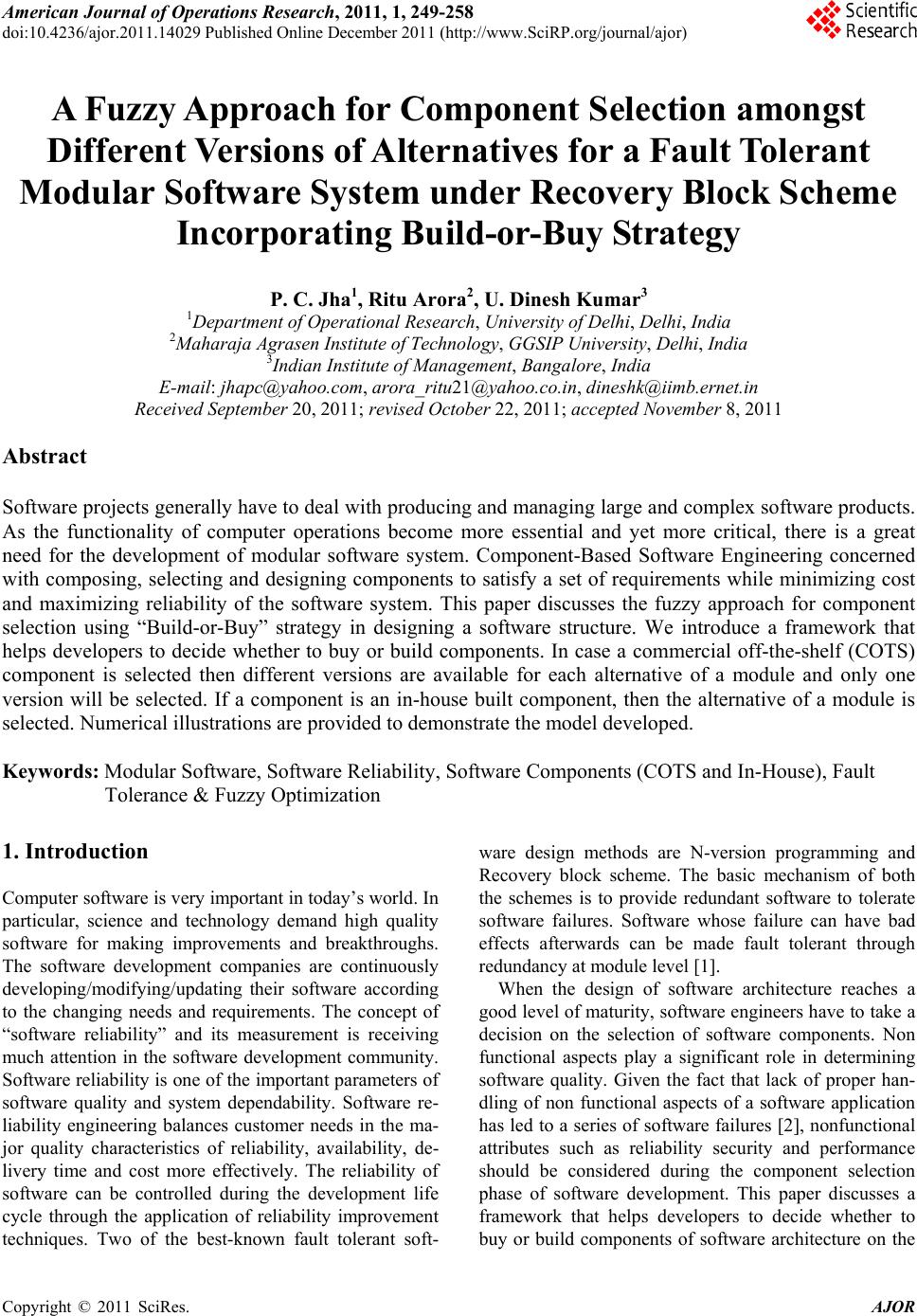
 American Journal of Operations Research, 2011, 1, 249-258 doi:10.4236/ajor.2011.14029 Published Online December 2011 (http://www.SciRP.org/journal/ajor) Copyright © 2011 SciRes. AJOR 249 A Fuzzy Approach for Component Selection amongst Different Versions of Alternatives for a Fault Tolerant Modular Software System under Recovery Block Scheme Incorporating Build-or-Buy Strategy P. C. Jha1, Ritu Arora2, U. Dinesh Kumar3 1Department of Operational Research, University of Delhi, Delhi, India 2Maharaja Agrasen Institute of Technology, GGSIP University, Delhi, India 3Indian Institute of Management, Bangalore, India E-mail: jhapc@yahoo.com, arora_ritu21@yahoo.co.in, dineshk@iimb.ernet.in Received September 20, 2011; revised October 22, 2011; accepted November 8, 2011 Abstract Software projects generally have to deal with producing and managing large and complex software products. As the functionality of computer operations become more essential and yet more critical, there is a great need for the development of modular software system. Component-Based Software Engineering concerned with composing, selecting and designing components to satisfy a set of requirements while minimizing cost and maximizing reliability of the software system. This paper discusses the fuzzy approach for component selection using “Build-or-Buy” strategy in designing a software structure. We introduce a framework that helps developers to decide whether to buy or build components. In case a commercial off-the-shelf (COTS) component is selected then different versions are available for each alternative of a module and only one version will be selected. If a component is an in-house built component, then the alternative of a module is selected. Numerical illustrations are provided to demonstrate the model developed. Keywords: Modular Software, Software Reliability, Software Components (COTS and In-House), Fault Tolerance & Fuzzy Optimization 1. Introduction Computer software is very important in today’s world. In particular, science and technology demand high quality software for making improvements and breakthroughs. The software development companies are continuously developing/modifying/updating their software according to the changing needs and requirements. The concept of “software reliability” and its measurement is receiving much attention in the software development community. Software reliability is one of the important parameters of software quality and system dependability. Software re- liability engineering balances customer needs in the ma- jor quality characteristics of reliability, availability, de- livery time and cost more effectively. The reliability of software can be controlled during the development life cycle through the application of reliability improvement techniques. Two of the best-known fault tolerant soft- ware design methods are N-version programming and Recovery block scheme. The basic mechanism of both the schemes is to provide redundant software to tolerate software failures. Software whose failure can have bad effects afterwards can be made fault tolerant through redundancy at module level [1]. When the design of software architecture reaches a good level of maturity, software engineers have to take a decision on the selection of software components. Non functional aspects play a significant role in determining software quality. Given the fact that lack of proper han- dling of non functional aspects of a software application has led to a series of software failures [2], nonfunctional attributes such as reliability security and performance should be considered during the component selection phase of software development. This paper discusses a framework that helps developers to decide whether to buy or build components of software architecture on the 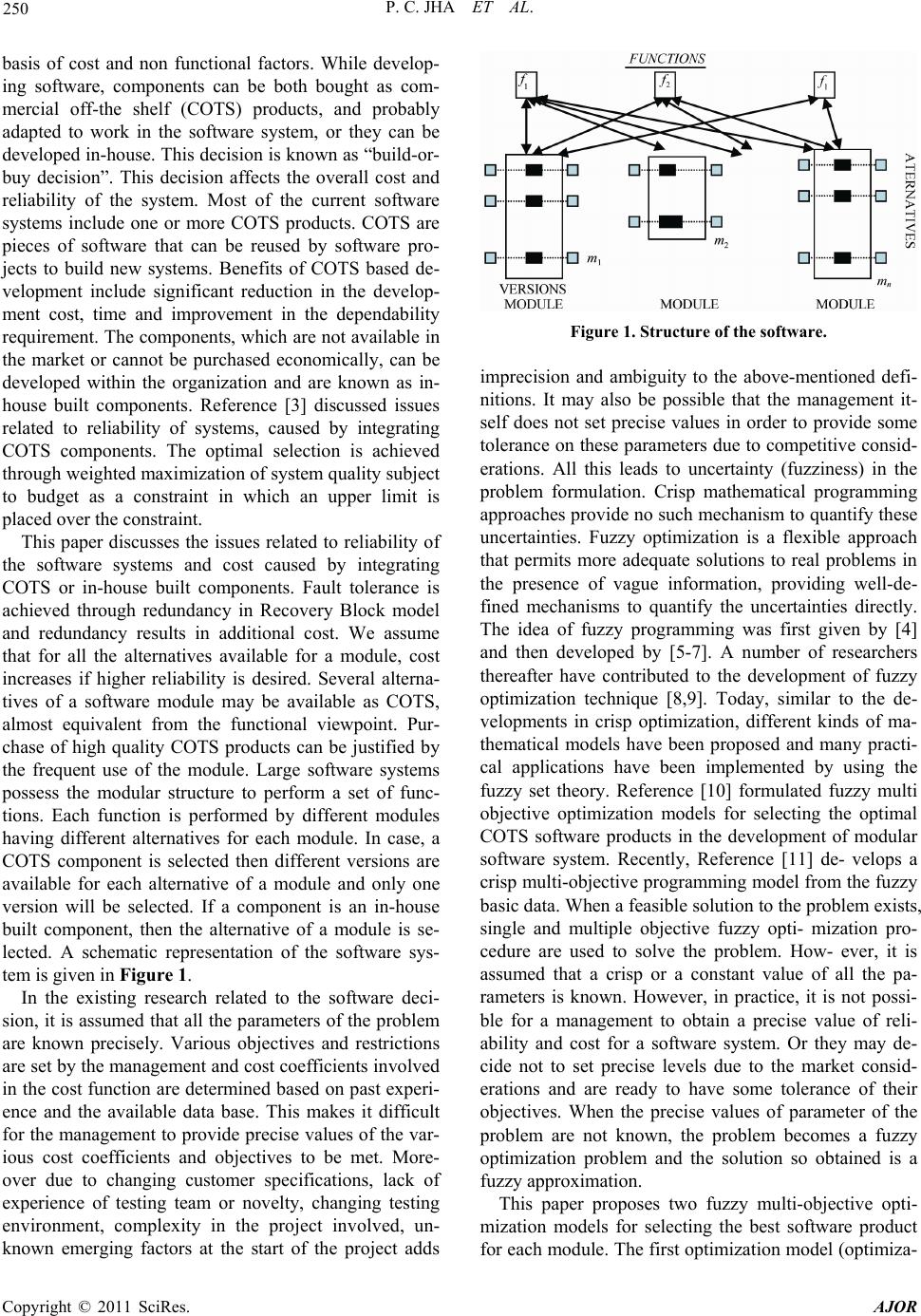 P. C. JHA ET AL. 250 basis of cost and non functional factors. While develop- ing software, components can be both bought as com- mercial off-the shelf (COTS) products, and probably adapted to work in the software system, or they can be developed in-house. This decision is known as “build-or- buy decision”. This decision affects the overall cost and reliability of the system. Most of the current software systems include one or more COTS products. COTS are pieces of software that can be reused by software pro- jects to build new systems. Benefits of COTS based de- velopment include significant reduction in the develop- ment cost, time and improvement in the dependability requirement. The components, which are not available in the market or cannot be purchased economically, can be developed within the organization and are known as in- house built components. Reference [3] discussed issues related to reliability of systems, caused by integrating COTS components. The optimal selection is achieved through weighted maximization of system quality subject to budget as a constraint in which an upper limit is placed over the constraint. This paper discusses the issues related to reliability of the software systems and cost caused by integrating COTS or in-house built components. Fault tolerance is achieved through redundancy in Recovery Block model and redundancy results in additional cost. We assume that for all the alternatives available for a module, cost increases if higher reliability is desired. Several alterna- tives of a software module may be available as COTS, almost equivalent from the functional viewpoint. Pur- chase of high quality COTS products can be justified by the frequent use of the module. Large software systems possess the modular structure to perform a set of func- tions. Each function is performed by different modules having different alternatives for each module. In case, a COTS component is selected then different versions are available for each alternative of a module and only one version will be selected. If a component is an in-house built component, then the alternative of a module is se- lected. A schematic representation of the software sys- tem is given in Figure 1. In the existing research related to the software deci- sion, it is assumed that all the parameters of the problem are known precisely. Various objectives and restrictions are set by the management and cost coefficients involved in the cost function are determined based on past experi- ence and the available data base. This makes it difficult for the management to provide precise values of the var- ious cost coefficients and objectives to be met. More- over due to changing customer specifications, lack of experience of testing team or novelty, changing testing environment, complexity in the project involved, un- known emerging factors at the start of the project adds Figure 1. Structure of the software. imprecision and ambiguity to the above-mentioned defi- nitions. It may also be possible that the management it- self does not set precise values in order to provide some tolerance on these parameters due to competitive consid- erations. All this leads to uncertainty (fuzziness) in the problem formulation. Crisp mathematical programming approaches provide no such mechanism to quantify these uncertainties. Fuzzy optimization is a flexible approach that permits more adequate solutions to real problems in the presence of vague information, providing well-de- fined mechanisms to quantify the uncertainties directly. The idea of fuzzy programming was first given by [4] and then developed by [5-7]. A number of researchers thereafter have contributed to the development of fuzzy optimization technique [8,9]. Today, similar to the de- velopments in crisp optimization, different kinds of ma- thematical models have been proposed and many practi- cal applications have been implemented by using the fuzzy set theory. Reference [10] formulated fuzzy multi objective optimization models for selecting the optimal COTS software products in the development of modular software system. Recently, Reference [11] de- velops a crisp multi-objective programming model from the fuzzy basic data. When a feasible solution to the problem exists, single and multiple objective fuzzy opti- mization pro- cedure are used to solve the problem. How- ever, it is assumed that a crisp or a constant value of all the pa- rameters is known. However, in practice, it is not possi- ble for a management to obtain a precise value of reli- ability and cost for a software system. Or they may de- cide not to set precise levels due to the market consid- erations and are ready to have some tolerance of their objectives. When the precise values of parameter of the problem are not known, the problem becomes a fuzzy optimization problem and the solution so obtained is a fuzzy approximation. This paper proposes two fuzzy multi-objective opti- mization models for selecting the best software product for each module. The first optimization model (optimiza- Copyright © 2011 SciRes. AJOR  251 P. C. JHA ET AL. tion model-I) of this paper is a joint optimization prob- lem that maximizes the system reliability with simulta- neous minimization of the cost. The second optimization model (optimization model-II) considers the issue of compatibility between different alternatives of modules as it is observed that some COTS components cannot integrate with all the alternatives of another module. We apply fuzzy optimization procedure to solve the problem, when a feasible solution of the problem exists, but in case we reach the infeasibility case, then we apply fuzzy goal programming optimization technique to provide a compromised solution for the same. The rest of this pa- per is organized as follows. Section 2 consists of pro- posed notations. In Section 3, we discuss the assump- tions of optimization models and we develop a crisp model for reliability and cost and in Section 4, we de- scribe Fuzzy Multi-Objective Optimization Model for software products selection. In Section 5, Fuzzy optimi- zation technique is discussed to solve the problem with numerical illustration. In Section 6, we furnish our con- cluding observations. 2. Notations R: System quality measure l : Frequency of use, of function l l : Set of modules required for function l i L R: Reliability of module i : Number of functions, the software is required to perform n: Number of modules in the software i m V: Number of alternatives available for module i ij : Number of versions available for alternative of module j i tot ij : Total number of tests performed on the in-house developed instance (i.e. alternative of module ) Ni uc ij : Number of successful (i.e. failure free) test per- formed on the in-house developed instance (i.e. alterna- tive of module ) N j i 1: Probability that next alternative is not invoked upon failure of the current alternative t 2 t t: Probability that the correct result is judged wrong. 3: Probability that an incorrect result is accepted as correct. ij : Event that output of alternative of module is rejected. j i ij Yi: Event that correct result of alternative of mod- ule is accepted. j ij : Reliability of alternative of module j ji ij C r: Reliability of alternative for module i ijk : Cost of version of alternative for module k j i ijk r: Reliability of version k of alternative for module j i i i ijk : Delivery time of version of alternative for module dk j i ij : Unitary development cost for alternative of module c j ij : Estimated development time for alternative of module t j ij : Average time required to perform a test case for alternative of module i j πij: Probability that a single execution of software fails on a test case chosen from a certain input distribu- tion t y: 0, 1, 1 if constraint is active if constraint is inactive th th t t : if the alternative of module is in-house develoep. 0otherwise th th ji ij y ijk : 1, 0, 1 if the version of COTS alternative of the module is chosen ot h e r w i s e th th th kj i ij z: Binary variable taking value 0 or 1 if alternative is present in module 0otherwise ji 3. Optimization Models The first optimization model is developed for the fol- lowing situations, which also holds good for the second model, but with additional assumptions related to com- patibility among alternatives of a module. The following assumptions are common for optimiza- tion models: 1) Software system consists of a finite number of mod- ules. 2) Software system is required to perform a known number of functions. The program written for a function can call a series of modules . A failure occurs if a module fails to carry out an intended operation. n 3) Codes written for integration of modules do not contain any bug. 4) Several alternatives are available for each module. Fault tolerant architecture is desired in the modules (it has to be within the specified budget). Independently developed alternatives (primarily COTS/In-House com- ponents) are attached in the modules and work similar to the recovery block scheme discussed in [12,13]. 5) The cost of an alternative is the development cost, if developed in house; otherwise it is the buying price for the COTS product. Copyright © 2011 SciRes. AJOR  P. C. JHA ET AL. 252 6) Different In-house alternatives with respect to uni- tary development cost, estimated development time, av- erage time and testability of a module are available. 7) Cost and reliability of an in-house component can be specified by using basic parameters of the develop- ment process, e.g., a component cost may depend on a measure of developer skills, or the component reliability depends on the amount of testing. 8) Different versions with respect to cost, reliability and delivery time of a module are available. 9) Other than available cost-reliability versions of an alternative, we assume the existence of virtual versions, which has a negligible reliability of 0.001, zero cost and zero delivery time. These components are denoted by index one in the third subscript of ijk , and ijk . for example 1 denotes the reliability of first version of alternatives for module . Cijk r ij r j i 3.1. Model Formulation Let be a software architecture made of modules, with a maximum number of i alternatives available for each module and each COTS alternatives has differ- ent versions. Sn m 3.1.1. Build versus Buy Decision For each module , if an alternative is bought (i.e. some ) then there is no in-house development (i.e. ) and vice versa. i 1 ijk x 0 ij y 1 =1 ij V ij ijk k yx ; and 1, 2,,in1, 2,,i jm 3.1.2. Redundancy Constrai nt The equation stated below guarantees that redundancy is allowed for the components. 2 ij V ijijk ij k yx 11 ij ij xz 1 i m j z1, 2,,in 1, 2,,in 1 ij 1, 2 ; and ; and ; 1, 2,,i jm 1, 2,,i jm z, ,in 3.1.3. Probability of Failure Free In-House Developed Components The possibility of reducing the probability that the alternative of module fails by means of a certain amount of test cases (represented by the variable ). Reference [14] define the probability of failure on de- mand of an in-house developed alternative of module, under the assumption that the on-field users’ operational profile is the same as the one adopted for testing [15]. th j tot ij th i th iN th j Basing on the testability definition, we can assume that the number uc ij Nth j of successful (i.e. failure free) tests performed on alternative of same module. 1π uc tot ijij ij NN ; 1, 2,,in and 1, 2,,i jm Let A be the event “ uc ij N failure-free test cases have been performed ” and B be the event “ the alternative is failure free during a single run”. If ij is the probability that the in-house developed alternative is failure free during a single run given that uc ij N test cases have been successfully performed, from the Bayes theorem we get the following. ij PABPB PBA PABPB PABPB The following equalities come straightforwardly: •1 •1π •1π •π uc ij ij N ij ij PAB PB PAB PB therefore, we have 1π 1ππ1π uc ij ij ij N ij ijij ; 1, 2,,in and 1, 2,,i jm 3.1.4. Reliability Equation of Both In-House and COTS Components The reliability (ij ) of alternative of module of the software. th jth i ijij ijij yr ; 1,2,,in and 1, 2,,i jm where 1 ij V ijijk ijk k rrx ; 1, 2,,in and 1, 2,,i jm 3.1.5. Delivery Time Constraint The maximum threshold has been given on the de- livery time of the whole system. In case of a COTS components the delivery time is simply given by ijk , whereas for an in- house developed alternative the deliv- ery time shall be expressed as . T d tot ijij ij tN ij V 11 1 i m ntot ij ijijijijk ijk ij k tN dx T Copyright © 2011 SciRes. AJOR  253 P. C. JHA ET AL. 3.2. Objective Function 3.2.1. Reliability Objective Function Reliability objective function maximizes the system quality (in terms of reliability) through a weighted func- tion of module reliabilities. Reliability of modules that are invoked more frequently during use is given higher weights. Analytic Hierarchy Process (AHP) can be effec- tively used to calculate these weights. 1 Maximize l L li lis RXf R where i is the reliability of module of the system under Recovery Block stated as follows. R i 1 11 iij ij mj z iijik ij jk RzPXPY 13 111 ij ij PXt s ; 1, 2,,in 2ij st t 2 1 ij ij PYs t 3.2.2. Cost Objective Function Cost objective function minimizes the overall cost of the system. The sum of the cost of all the modules is selected from “build- or -buy” strategy. The in-house develop- ment cost of the alternative of module can be expressed as j i ij V tot ijijij ij ct N m n 11 1 Minimize itot ij ijijijijijk ijk ij k CXc tNyCx 3.3. Optimization Model I In the optimization model it is assumed that the alterna- tives of a module are in a Recovery Block. In a Recovery block, more than one alternative of a program exist. For COTS based software, multiple alternatives of a module can be purchased from different vendors. Each module works under a recovery block. Upon invocation of a module the first alternative is executed and the result is submitted for acceptance test. If it is rejected, the second alternative is executed with the original inputs. The same process continues through attached alternative until a result is accepted or the whole recovery block (module) fails. Fault tolerance in a recovery block is achieved by increasing the number of redundancies. Problem (P1) 1 Maximize l L l lis RXf R i (1) 11 1 Minimize ij iV m ntot ijijijijijijk ijk ij k CXctNyCx (2) subject to and are binary variable ijk ij XS xy 1 11 iij ij mj z iijik ij jk RzPXPY ; (3) 1, 2,,in 13 111 ijij ij PXtstst 2 2 1 ij ij PYst 1π uc tot ijij ij NN; 1,2,,in and (4) 1, 2,,i jm 1π ; 1ππ1π 1,2,, and 1,2,, suc ij ij ij N ij ijij i inj m (5) ijij ijij yr ; 1, 2,,in and (6) 1, 2,,i jm 1 1 ij V ij ijk k yx ; 1,2,,in 1, 2,,jm z and (7) i 2 ij V ijijk ij k yx ; 1, 2,,in1, 2,,jm and (8) i 11 ij ij xz ; 1, 2,,in and (9) 1, 2,,i jm 1 1 i m ij j z ; (10) 1, 2,,in 11 1 ij iV m ntot ijijijijijk ijk ij k ytNdx T (11) where is a vector of component ijk and ; ij y 1, 2in, , ; 1, 2,,i jm ; . 1, ij kV2, , 3.4. Optimization Model II As explained in the introduction, it is observed that some alternatives of a module may not be compatible with alternatives of another module [16]. The next optimiza- tion model II addresses this problem. It is done, incorpo- rating additional constraints in the optimization models. This constraint can be represented as t sqhu c x, which means that if alternative for module is chosen, then alternative , t u1, ,tz have to be chosen for module . We also assume that if two alternatives are compatible, then their versions are also compatible. h t sqhu ct xMy 2, , s qV , 2,,t hu cV, 1, , m (12) Copyright © 2011 SciRes. AJOR  P. C. JHA ET AL. 254 2 t thu yzV (13) Constraint (12) and (13) make use subject to of binary variable t y fer to choose one pair of alternatives from among dif- ent alternative pairs of modules. Finally, model can be re-written as Problem (P2) 1 ximize l li lis RXf R 11 = i m ntot ij ijij ijij ij CXctNy Ma L 1 Minimize ij V ijk ijk k Cx S t sqthu c xMy 2, , s, t hu , qV2, ,cV1, , m, 2 atible co u t th yzV If more than one alternative compmponent is to be c 4. Fuzzy Multi-Objective Optimization ris the concept sed on va tion model for software roducts selection based on maximizing the fuzzifier x subject to hosen for redundancy, constraint (13) can be re- laxed as follows. 2 t thu yzV Model for Software Products inciple to multi-objective optimization P of an “efficient solution”, where any improvement of one objective can only be achieved at the expense of another. The fuzzy approach can be used as an effective tool for quickly obtaining a good compromise solution. Conven- tional optimization methods assume that all parameters and goals of an optimization model are precisely known. However, for many practical problems there are incom- pleteness and unreliability of input information. This has resulted in use of fuzzy multi-objective optimization method with fuzzy parameters. For instance, a designer is required to minimize the system cost while simultane- ously maximizing the system reliability. Therefore mul- tiple objective functions become an important aspect in the reliability design of the engineering systems. In general reliability optimization problem is solved with the assumption that the coefficients or cost of com- ponents is specified in a precise way. In real life, there are many diverse situations due to uncertainty in judg- ments, lack of evidence, etc. Sometimes it is not possible to get relevant precise data for the reliability system. This type of imprecise data is not always well repre- sented by random variable selected from a probability distribution. Fuzzy number may represent this data, so fuzzy optimization method with fuzzy parameters is needed for a fuzzy reliability optimization model. Therefore, we formulate fuzzy multi-objective opti- mization model for software products selection ba gue aspiration levels, the decision maker may decide his aspiration levels on the basis of past experience and knowledge possessed by him. To express vague aspira- tion levels of the decision, various membership functions have been proposed [6,7]. A fuzzy mathematical pro- gramming problem with non linear membership function results in a non linear programming problem. Usually, a linear membership function is employed to avoid non- linearrity. Further, if membership function is interpreted as the fuzzy utility of the decision maker, which describes the behavior of indifference, preference or aversion to- wards uncertainty, a non linear membership function is a better representation than a linear membership function. 4.1. Problem Formulation Fuzzy multi-objective optimiza p reliability function and minimizing the fuzzifier cost function subject to crisp constraints are stated as follows. Problem (P3) L 1 ximize () l li lis RXf R Ma 111 Minimize(X) = ij iV m ntot ijijijijijijk ijk ij k CctNyC S Here, we have defined the two objective functions, the and cost that are considered to be vague and un tion sed to solve the fuzzy mathe- atical programming problem. function. Same defuzzi- fic reliability certain (i.e. fuzzy in nature) and the constraints are of crisp nature. Cut-throat competition in the existing mar- ket, system complexity, and intended flexibility makes it difficult for the management to precisely define their goals and constraints. Moreover a slight shift on bounds can provide a more efficient solution. Hence, we have used fuzzy optimization technique (fuzzy mathematical programming) to solve the fuzzy multi-objective opti- mization problem. 4.2. Problem Solu The following steps are u mStep 1. Compute the crisp equivalent of the fuzzy pa- rameters using a defuzzification ation function is to be used for each of the parameters. Copyright © 2011 SciRes. AJOR  255 P. C. JHA ET AL. Here we use the defuzzification function of the type 2 123 24FAaa a where are the triangular fuzzy numbers. Step Ie the objective function of the fuzzi- n (maxn (a 1 a, 2. 2 a, ncor 3 a porat fier mi) as a fuzzy constraint with a restrictio spiration) level. The above problem (P3) can be re- written as Problem (P4) Find subject to 0 1l L li lis RXfR R 0 11 1 ij V tot ijijijijijijk ijk ij k CXc tNyCxC i m n S Step 3. Define appropriate membership functions for each fuzzy inequalities as well constraint correspond- in as g to the objective function. The membership function for the fuzzy less than or equal to and greater than or equal to type are given as 0 * 0* 00 * 00 * 0 1; RX R ; 0; R RX R RRXR RR RX R where is the aspiration level and is the toler- fuzzy reliability objfunction con- 0 R ance level to the * 0 R ective straint. 0 * 0* 00 * 00 * 0 1; CXC ; 0;( ) C CC X CCXC CC CX C where is the restriction level and is the toler- he fuzzy budget constraint. 4. to mathematical pr 0 C ance level to t * 0 C Step Extension principle is used identify the fuzzy decision, which results in a crisp ogramming problem given by Problem (P5) Maximize subject to X R , CX , S can be solved by the standard crisp mathem gramming algorithms. onstraint. Each constraint is co atical pro- Step 5. While solving the problem, the objective of the problem is also treated as a c nsidered to be an objective for the decision maker and the problem can be looked as a fuzzy multiple objective mathematical programming problem. Further each objec- tive can have a different level of importance and can be assigned weights according to their relative importance. The resulting problem can be solved by the weighted minmax approach. The crisp formulation of the weighted problem is given as Problem (P6) Maximize subject to 1R w , C 2 w , S where, 12 ww,0, 12 1ww represents the gree up to which the aspira- tion of the decision maker is met. If thnstraints are de e co fuzzy as well as crisp, then in the equivalent crisp ma- thematical programming problem, there will be no change in the original crisp constraints since their toler- ances are zero except for those constraints which are fuzzy in nature. The problem (P6) can be solved using standard mathematical programming approach. Step 6. On substituting the values for R and C the problem becomes Problem (P7) mize Maxi subject to * 10 wR R 0 1R RX0 * 020 1CXCwC C 0 S 0, 1 12 ,0ww, 12 1ww Step 7. If a feasible solution is not otainable for the problem (P7) then we can use fuzzy googramming ap aving two modules with ore than one alternative for each module. The data sets b al pr proach to obtain a compromised solution [9]. The me- thod is discussed in detail in the numerical illustration. 5. Illustrative Examples Consider a software system h m for COTS and in-house developed components are given in Table 1 and Table 2, respectively. Let 3L , 11, 2, 3s, 21, 3s, 32s, 10.5f , 20.3f , 30.2f . It is also assumed that 1 t0.01 , 2 t0.05 and ent of weig 3 t is based on the expert’s 0.01. tsThe assignmh judgment for the reliability and the cost criteria. Weights as nimum and Maximum Level of Reliability and Cost First liability and cost values are omputed using fuzzied values of these parameters and signed for reliability and cost are 0.7 and 0.3 respec- tively. 5.1. Mi ly, the triangular fuzzy re c Copyright © 2011 SciRes. AJOR  P. C. JHA ET AL. 256 Table 1. Data set for COTS components. Version 1 Modules Alternatives Cost Reliability Delivery Time 1 0 0.00 01 2 0 0.001 0 1 3 0 0.001 0 1 0 0.001 0 2 0 0.001 0 2 3 0 0.001 0 1 0 0.001 0 2 0 0.001 0 3 3 0 0.001 0 Version 2 Modules Alternatives Cost Reliability Delivery Time 1 14 0.90 3 2 12.5 0.86 4 1 3 17 0.90 2 1 13 0.87 4 2 11 0.91 5 2 3 18 0.89 2 1 13 0.86 4 2 16 0.85 3 3 3 16 0.89 3 Version 3 Modules Alternatives Cost Reliability Delivery Time 1 11 0.88 4 2 18 0.92 2 1 3 15 0.88 3 1 17.5 0.86 2 2 12 0.89 4 2 3 15 0.86 3 1 14 0.88 3 2 18 0.90 2 3 3 17 0.87 2 Table 2. Data set n-h omponen Mo for iouse cts. dule i Alternatives i t i i ci 1 8 0.005 5 0.002 2 60.005 4 0.00 2 3 21 3 7 0.005 4 0.002 1 9 0.005 5 0.002 2 5 0.005 2 0.002 3 6 0.005 4 0.002 4 5 0.005 3 0.002 1 6 0.005 4 0.002 2 5 0.005 3 0.002 then defuzzied using Hn’ s f thil- ble reliability and cost are specified as TFN (triangular The aspiration level of reliability is and the restriction on cost is eilper deuzzier.If e ava a fuzzy number) given as follows 00.93,0.95,0.97R ; C . 070,75,80 00.95R 075C . The tolerance * 085C. level fo ming (P7) not feasible; hence the management goal cannot be r reliability and cost is * 00.85R and 5.2. Fuzzy Goal Program Approach On solving the problem, we found that the problem is achieved for a feasible value of 0,1 . Now we use fuzzy goal programming technique to obtain a compro- mised solution. The approach is the goal pro- gramming technique for solving crisp goal programming problem (Mohamed, 1997). The maximum value of any membership function can be 1; maximization of based on 0,1 is equivalent to making it as close to 1 as best as possible. This can be achieved by minimizi deviational variables of goal programming (i.e. ) from 1. The fuzzy goal programming formulation for the given problem (P7) introducing the negative and pos- itive deviational variables ng the negative and is given as Minimize u subject to 11R1X 22 1 CX j uw ; 0 jj ; ,0 jj 1, 2j S ; 0, 1 ; 12 1ww 12 ,0ww; ; 1u 5.3. Optimization Model I for optimization model I. he problem is solved using software package LINGO l for compatibility, we se previous results. ond alternative of first module is co econd m Table 3 presents the solution T [17]. The solution to the model gives the optimal com- ponent selection for the software system along with the corresponding cost and reliability of the overall system. The sensitivity analysis to the delivery time constraint has been performed. It is clearly seen from the table that in case 1, when the delivery time was 15 units then one in-house and other COTS components were selected while in all other cases when the delivery time increases along with in-house components there will be a corre- sponding change in reliability and cost. In case 2, when the delivery time was 18 units, our system reliability and cost also increases and in case 3 as compared to case 2, when delivery time was 20 units, system reliability in- creases and cost decreases. Therefore, if the customer is ready to wait then case 3 is an optimal solution. Redun- dancy is also present in all the three cases. 5.4. Optimization Model II To illustrate optimization mode uCase 1. Delivery time is assumed to be 15 units. We assume that sec mpatible with second and third alternative of s odule. Following solution was obtained using LINGO. Copyright © 2011 SciRes. AJOR  P. C. JHA ET AL. Copyright © 2011 SciRes. AJOR 257 Case No. Delivery Time In-House ty Overall System Cost α Value Table 3. Solution for optimization model I. COTS System Reliabili 1 15 y32 = 1 x111 = = 1 x21 0.92 75 0.84 x123 = x132 1 = x223 = x232 = x241 = 1 x311 = 1 2 18 y24 = y32 = 1 111 2 0.93 77.5 0.86 3 20 y24 = y32 = 1 111 2 0.94 76 0.90 x = x123 = x13 = 1 x211 = x223 = x232 = 1 x311 = 1 x = x123 = x13 = 1 x211 = x223 = x232 = 1 x311 = 1 It is observed that due to the comatibility condition, th 32 1y 223 x 111123132 1xxx 233241 1xxx 311 x 211 1 p ird alternative of second module is chosen as it is compatible with second alternative of first module. The system reliability for the above solution is 0.86 and cost is 85 units. The achievement level of the membership function is 0.40 . Case 2. Delieme is assumed to be 20 units. vry ti odule is We assume that second alternative of second m compatible with second and third alternative of first module. Following solution was obtained using LINGO. 2432 1yy 111123133 1xxx 211 222 xx 231 1x 311 1x It is observed that due to the compatibility condition, third alternative of first module is chosen as it is com- patible with second alternative of second module. The system reliability for the above solution is 0.93 and cost is 77 units. The achievement level of the membership function is 0.90 . . Conclusions ptimization models that supports the and cost. This developed approach can effectively deal efully acknowledges nt of Maharaja Agrasen In- ir permission to publish this adrzejowicz, “An Approach to Reliability oftware with Redundancy,” IEEE Transac- re Engineering, Vol. 17, No. 3, 1991, pp. 310-312. 6 e have presented oW decision whether to buy software components for soft- ware architecture or to build them in-house. We have formulated bi-criteria optimization models based on de- cision variables indicating the set of structural compo- nents “to buy” and “to build” in order to minimize the software cost with simultaneous maximization of system reliability. The problem is formulated for Recovery Block fault-tolerant software system. It may be appreci- ated that when different alternatives of the same module are available with variations in the attributes of reliability and cost, then it involves multi-objective decision mak- ing environment that befits more of fuzzy approximation than deterministic formulation. Therefore, we have drawn on fuzzy methodology for the estimation of reliability with the vagueness and subjectivity of expert’s informa- tion. Fuzzy predictions of the triangular fuzzy statistical data have been defuzzified using Heipern’s defuzzifier and a crisp multi-objective model has been developed using the defuzzified values. The component selection problem is formulated as a multi-objective programming problem and fuzzy goal programming technique is used to provide a feasible solution. 7. Acknowledgements ne of the authors, Ritu Arora, gratO the Director and Manageme titute of Technology for thes research work. 8. References ] F. Belli and P. J[1 Optimization S tion of Softwa [2] L. M. Cysneiros and J. C. S. Leite, “Nonfunctional Re- Quirements: From Elicitation to Conceptual Models,” IEEE Transactions on Software Engineering, Vol. 30, No. 5, 2004, pp. 328-350. doi:10.1109/TSE.2004.10 [3] P. K. Kapur, A. K. Bardhan and P. C. Jha, “Optimal Reli- ability Allocation Problem for a Modular Software Sys- tem,” OPSEARCH, Vol. 40, No. 2, 2003, pp. 138-148. [4] R. E. Bellman and L. A. Zadeh, “Decision-Making in a Fuzzy Environment,” Management Science, Vol. 17, No. 4, 1970, pp. B141-B164. doi:10.1287/mnsc.17.4.B141 [5] H. Tanaka, T. Okuda and K. Asai, “On Fuzzy Mathe- matical Programming,” Journal of Cybernetics, Vol. 3, No. 4, 1974, pp. 37-46. doi:10.1080/01969727308545912 [6] H. J. Zimmermann, “Description and Optimization of Fuzzy Systems,” International Journal of General Sys- tems, Vol. 2, No. 4, 1976, pp. 209-215. doi:10.1080/03081077608547470 [7] H. J. Zimmermann, “Fuzzy Set Theory and Its Applica-  P. C. JHA ET AL. 258 and Its Applica- cht, 1991. Sys- tions,” Kluwer Academic Publishers, Boston, 1985. [8] H. J. Zimmermann, “Fuzzy Set Theory tions,” Academic Publisher, Dordre [9] R. H. Mohamed, “The Relationship between Goal Pro- gramming and Fuzzy Programming,” Fuzzy Sets and tems, Vol. 89, No. 2, 1997. pp. 215-222. doi:10.1016/S0165-0114(96)00100-5 [10] P. Gupta, M. K. Mehlawat, G. Mittal and S. Verma, “A Hybrid Approach for Selecting Optimal COTS Products,” Computational Science and Its Applicat ringer Publication, Berlin, 2009, pp. 94 ion-ICCSA, Sp- 9-962. [11] B. P. Gladish, I. Gonzalez; A. B. Terol and M. A. Parra, “Planning a TV Advertising Campaign: A Crisp Multi objective Programming Model from Fuzzy Basic Data,” Omega, Vol. 38, No. 1-2, 2010, pp. 84-94. doi:10.1016/j.omega.2009.04.004 [12] O. Berman and U. D. Kumar, “Optimization Models for Reliability of Modular Software System,” IEEE Transac- tion of Software Engineering, Vol. 19, No. 11, 1993, pp ar, “Reliability Analysis of Fault Tolerant essa, F. Marinelli and P. Potena, “An Optimiza- . 1119-1123. [13] U. D. Kum Recovery Block,” OPSEARCH, Vol. 35, No. 4, 1998, pp. 281-294. [14] V. Cortell tion Framework for ‘Build-Or-Buy’ Decisions in Soft- ware Architecture,” Computers and Operations Research, Vol. 35, No. 10, 2008, pp. 3090-3106. doi:10.1016/j.cor.2007.01.011 [15] A. Bertolino and L. Strigini, “On the Use of Testability Measures for Dependability Assessment,” IEEE Transac- tions on Software Engineering, Vol. 22, No. 2, 1996, pp. 97-108. doi:10.1109/32.485220 [16] H. W. Jung and B. Choi, “Optimization Models for Qual- ity and Cost of Modular Software System,” European Journal of Operations Research, Vol. 112, No. 3, 1999, pp. 613-619. doi:10.1016/S0377-2217(98)00169-6 [17] H. Thiriez “OR Software LINGO,” European Journal of Operational Research, Vol. 12, 2000, pp. 655-656. Copyright © 2011 SciRes. AJOR
|