 Modern Mechanical Engineering, 2011, 1, 93-103 doi:10.4236/mme.2011.12012 Published Online November 2011 (http://www.SciRP.org/journal/mme) Copyright © 2011 SciRes. MME The Effect of Mass Ratio and Air Damper Characteristics on the Resonant Response of an Air Damped Dynamic Vibration Absorber Ranjit G. Todkar1, Shridhar G. Joshi2 1 Department of Mechanical Engineering, P.V.P. Institute of Technology, Budhagaon, Sangli, India 2Department of Mechanical Engineering, Walchand College of Engineering, Sangli, India E-mail: rgtodkar@gmail.com Received October 21, 2011; revised November 25, 2011; accepted November 12, 2011 Abstract In this paper, it is shown that, a road vehicle 2DOF air damped quarter-car suspension system can conven- iently be transformed into a 2DOF air damped vibrating system representing an air damped dynamic vibra- tion absorber (DVA) with an appropriate change in the ratio µ of the main mass and the absorber mass i.e. when mass ratio µ >> 1. Also the effect of variation of the mass ratio, air damping ratio and air spring rate ratio, on the motion transmissibility at the resonant frequency of the main mass of the DVA has been dis- cussed. It is shown that, as the air damping ratio in the absorber system increases, there is a substantial de- crease in the motion transmissibility of the main mass system where the air damper has been modeled as a Maxwell type. Optimal value of the air damping ratio for the minimum motion transmissibility of the main mass of the system has been determined. An experimental setup has been designed and developed with a control system to vary air pressure in the damper in the absorber system. The motion transmissibility charac- teristics of the main mass system have been obtained, and the optimal value of the air damping ratio has been determined for minimum motion transmissibility of the main mass of the system Keywords: Air Damped Dynamic Vibration Absorber, Motion Transmissibility, Effect of Mass Ratio, Air Damper, Optimization 1. Introduction Many real engineering systems such as, a road vehicle suspension system, a dynamic vibration absorber system, a vibration isolation system of machinery (where the floor supporting the machine is sufficiently flexible), a double centrifugal pendulum system etc., can be adequately re- presented as 2DOF vibrating systems [1]. As such, in this paper, a 2DOF air damped vibrating system representing a 2DOF air damped dynamic vibration absorber has been studied. In this case, the mass ratio µ i.e., ratio of the main mass m2 to the auxiliary mass m1 is greater than unity (µ >> 1) and is in the range of 2.5 to 5.0. Also the effect of variation of the mass ratio, air spring rate ratio and air damping ratio on the motion transmissibility of main mass has been discussed. It has been shown that, as the air damping ratio in the absorber system increases, there is a substantial decrease in the motion transmissi- bility of the main mass system in the neighborhood of resonant frequency for the case where the air damper is modeled as a Maxwell type [2,3]. Optimal value of the air damping ratio for the minimum transmissibility of the main mass system has been determined. An experimental setup has been designed with an air pressure control sys- tem for setting the appropriate value of air damping ratio in the system.The motion transmissibility characteristics of the main mass m2 of the dynamic vibration absorber model have been obtained. 2. Equations of Motion Equations of motion have been derived and are given respectively in Tables 1, 2 and 3 for the following [2], 1) A 2DOF dynamic vibration absorber system with system damping only and without air damper (Refer Fi- gure 1 in Table 1), here after referred as Case 1. 2) A 2DOF air damped dynamic vibration absorber system with system damping and, Vogit type model for 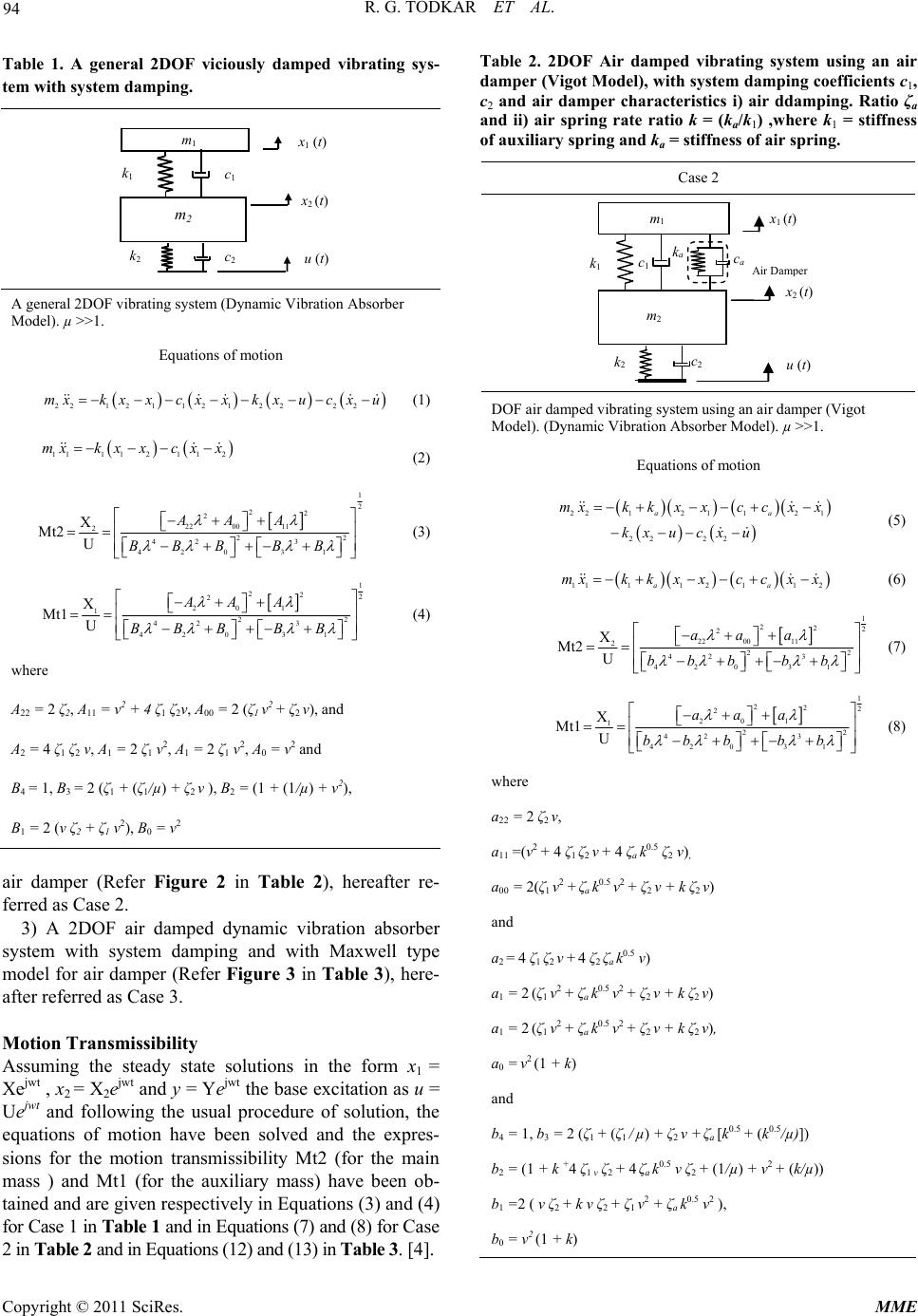 R. G. TODKAR ET AL. 94 Table 1. A general 2DOF viciously damped vibrating sys- tem with system damping. m 2 m 1 x 1 (t) x 2 (t) u (t) c 2 k 2 c 1 k 1 A general 2DOF vibrating system (Dynamic Vibration Absorber Model). µ >>1. Equations of motion 2212 112 12222 mxkxxcxxkx ucxu (1) 111 121 12 mxkxxcxx (2) 1 2 22 2 22 0011 2 22 42 3 420 31 X Mt2U AA A BBB BB (3) 1 222 2 20 1 1 22 42 3 420 31 X Mt1 U AA A BBB BB (4) where A22 = 2 ζ2, A11 = v2 + 4 ζ1 ζ2v, A00 = 2 (ζ1 v2 + ζ2 v), and A2 = 4 ζ1 ζ2 v, A1 = 2 ζ1 v2, A1 = 2 ζ1 v2, A0 = v2 and B4 = 1, B3 = 2 (ζ1 + (ζ1/µ) + ζ2 v ), B2 = (1 + (1/µ) + v2), B1 = 2 (v ζ2 + ζ1 v2), B0 = v2 air damper (Refer Figure 2 in Table 2), hereafter re- ferred as Case 2. 3) A 2DOF air damped dynamic vibration absorber system with system damping and with Maxwell type model for air damper (Refer Figure 3 in Table 3), here- after referred as Case 3. Motion Transmissibility Assuming the steady state solutions in the form x1 = Xejwt , x2 = X2ejwt and y = Yejwt the base excitation as u = Uejwt and following the usual procedure of solution, the equations of motion have been solved and the expres- sions for the motion transmissibility Mt2 (for the main mass ) and Mt1 (for the auxiliary mass) have been ob- tained and are given respectively in Equations (3) and (4) for Case 1 in Table 1 and in Equations (7) and (8) for Case 2 in Table 2 and in Equations (12) and (13) in Table 3. [4]. Table 2. 2DOF Air damped vibrating system using an air damper (Vigot Model), with system damping coefficients c1, c2 and air damper characteristics i) air ddamping. Ratio ζa and ii) air spring rate ratio k = (ka/k1) ,where k1 = stiffness of auxiliary spring and ka = stiffness of air spring. Case 2 m 1 c 1 x 1 (t) x 2 (t u (t) k 1 k a c a k 2 c 2 m 2 Air Dam e DOF air damped vibrating system using an air damper (Vigot Model). (Dynamic Vibration Absorber Model). µ >>1. Equations of motion 2212 112 1 22 22 aa mxkkxx ccxx kx ucx u (5) 1111 211 2aa mxkkxx ccxx (6) 1 222 2 22 0011 2 22 42 3 420 31 X Mt2 U aa a bbb bb (7) 1 222 2 20 1 1 22 42 3 420 31 X Mt1 U aa a bbb bb (8) where a22 = 2 ζ2 v, a11 =(v2 + 4 ζ1 ζ2 v + 4 ζa k0.5 ζ2 v), a00 = 2(ζ1 v2 + ζa k0.5 v2 + ζ2 v + k ζ2 v) and a2 = 4 ζ1 ζ2 v + 4 ζ2 ζa k0.5 v) a1 = 2 (ζ1 v2 + ζa k0.5 v2 + ζ2 v + k ζ2 v) a1 = 2 (ζ1 v2 + ζa k0.5 v2 + ζ2 v + k ζ2 v), a0 = v2 (1 + k) and b4 = 1, b3 = 2 (ζ1 + (ζ1 / µ) + ζ2 v + ζa [k0.5 + (k0.5/µ)]) b2 = (1 + k +4 ζ1 v ζ2 + 4 ζa k0.5 v ζ2 + (1/µ) + v2 + (k/µ)) b1 =2 ( v ζ2 + k v ζ2 + ζ1 v2 + ζa k0.5 v2 ), b0 = v2 (1 + k) Copyright © 2011 SciRes. MME 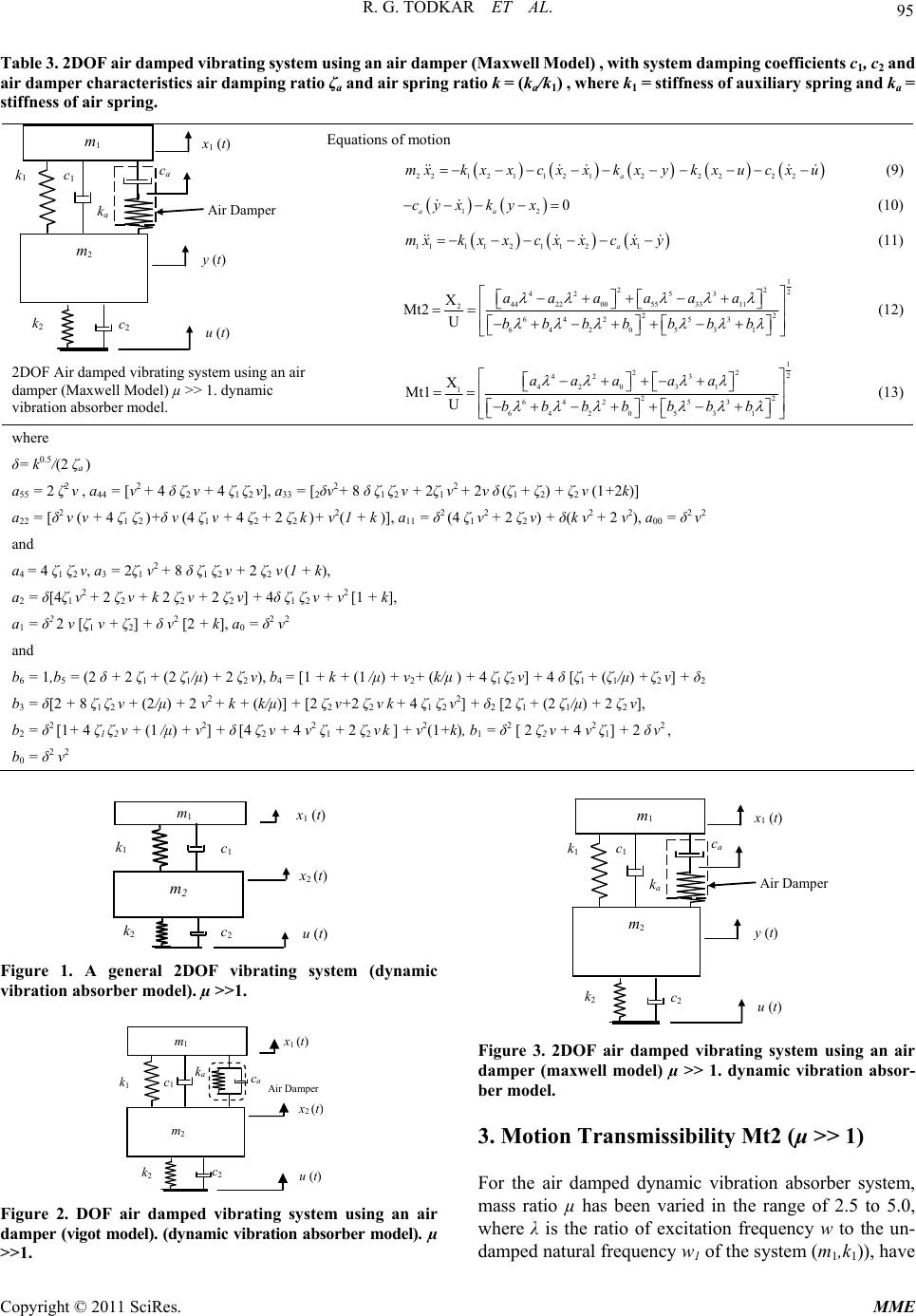 R. G. TODKAR ET AL. Copyright © 2011 SciRes. MME 95 Table 3. 2DOF air damped vibrating system using an air damper (Maxwell Model) , with system damping coefficients c1, c2 and air damper characteristics air damping ratio ζa and air spring ratio k = (ka/k1) , where k1 = stiffness of auxiliary spring and ka = stiffness of air spring. Equations of motion 2212112122 22 2a mxkxxcxxkxykx ucx u (9) 12 0 aa cyx kyx (10) 111 121121a mxkx xcxxcxy (11) m 2 m 1 k a y (t) Air Damper x 1 (t) c 1 k 1 u (t) c a c 2 k 2 1 22 2 42 53 44220055 33 11 2 2 642 53 6420 531 X Mt2 U aaa aaa bbbb bbb 2 (12) 2DOF Air damped vibrating system using an air damper (Maxwell Model) µ >> 1. dynamic vibration absorber model. 1 22 2 42 3 420 31 1 2 642 53 6420 531 X Mt1 U aaa aa bbbb bbb 2 (13) where δ= k0.5/(2 ζa ) a55 = 2 ζ2 v , a44 = [v2 + 4 δ ζ2 v + 4 ζ1 ζ2 v], a33 = [2δv2+ 8 δ ζ1 ζ2 v + 2ζ1 v2 + 2v δ (ζ1 + ζ2) + ζ2 v (1+2k)] a22 = [δ2 v (v + 4 ζ1 ζ2 )+δ v (4 ζ1 v + 4 ζ2 + 2 ζ2 k )+ v2(1 + k )], a11 = δ2 (4 ζ1 v2 + 2 ζ2 v) + δ(k v2 + 2 v2), a00 = δ2 v2 and a4 = 4 ζ1 ζ2 v, a3 = 2ζ1 v2 + 8 δ ζ1 ζ2 v + 2 ζ2 v (1 + k), a2 = δ[4ζ1 v2 + 2 ζ2 v + k 2 ζ2 v + 2 ζ2 v] + 4δ ζ1 ζ2 v + v2 [1 + k], a1 = δ2 2 v [ζ1 v + ζ2] + δ v2 [2 + k], a0 = δ2 v2 and b6 = 1,b5 = (2 δ + 2 ζ1 + (2 ζ1/μ) + 2 ζ2 v), b4 = [1 + k + (1 /μ) + v2+ (k/μ ) + 4 ζ1 ζ2 v] + 4 δ [ζ1 + (ζ1/μ) + ζ2 v] + δ2 b3 = δ[2 + 8 ζ1 ζ2 v + (2/μ) + 2 v2 + k + (k/μ)] + [2 ζ2 v+2 ζ2 v k + 4 ζ1 ζ2 v2] + δ2 [2 ζ1 + (2 ζ1/μ) + 2 ζ2 v], b2 = δ2 [1+ 4 ζ1 ζ2 v + (1 /μ) + v2] + δ [4 ζ2 v + 4 v2 ζ1 + 2 ζ2 v k ] + v2(1+k), b1 = δ2 [ 2 ζ2 v + 4 v2 ζ1] + 2 δ v2 , b0 = δ2 v2 m 2 m 1 k a y (t) Air Damper x 1 (t) c 1 k 1 u (t) c a c 2 k 2 m 2 m 1 x 1 (t) x 2 (t) u (t) c 2 k 2 c 1 k 1 Figure 1. A general 2DOF vibrating system (dynamic vibration absorber model). µ >>1. m 1 c 1 x 1 (t) x 2 (t u (t) Figure 3. 2DOF air damped vibrating system using an air damper (maxwell model) µ >> 1. dynamic vibration absor- ber model. k 1 k a c a k 2 c 2 m 2 Air Dam er 3. Motion Transmissibility Mt2 (μ >> 1) For the air damped dynamic vibration absorber system, mass ratio µ has been varied in the range of 2.5 to 5.0, where λ is the ratio of excitation frequency w to the un- damped natural frequency w1 of the system (m1,k1)), have Figure 2. DOF air damped vibrating system using an air damper (vigot model). (dynamic vibration absorber model). µ >>1. 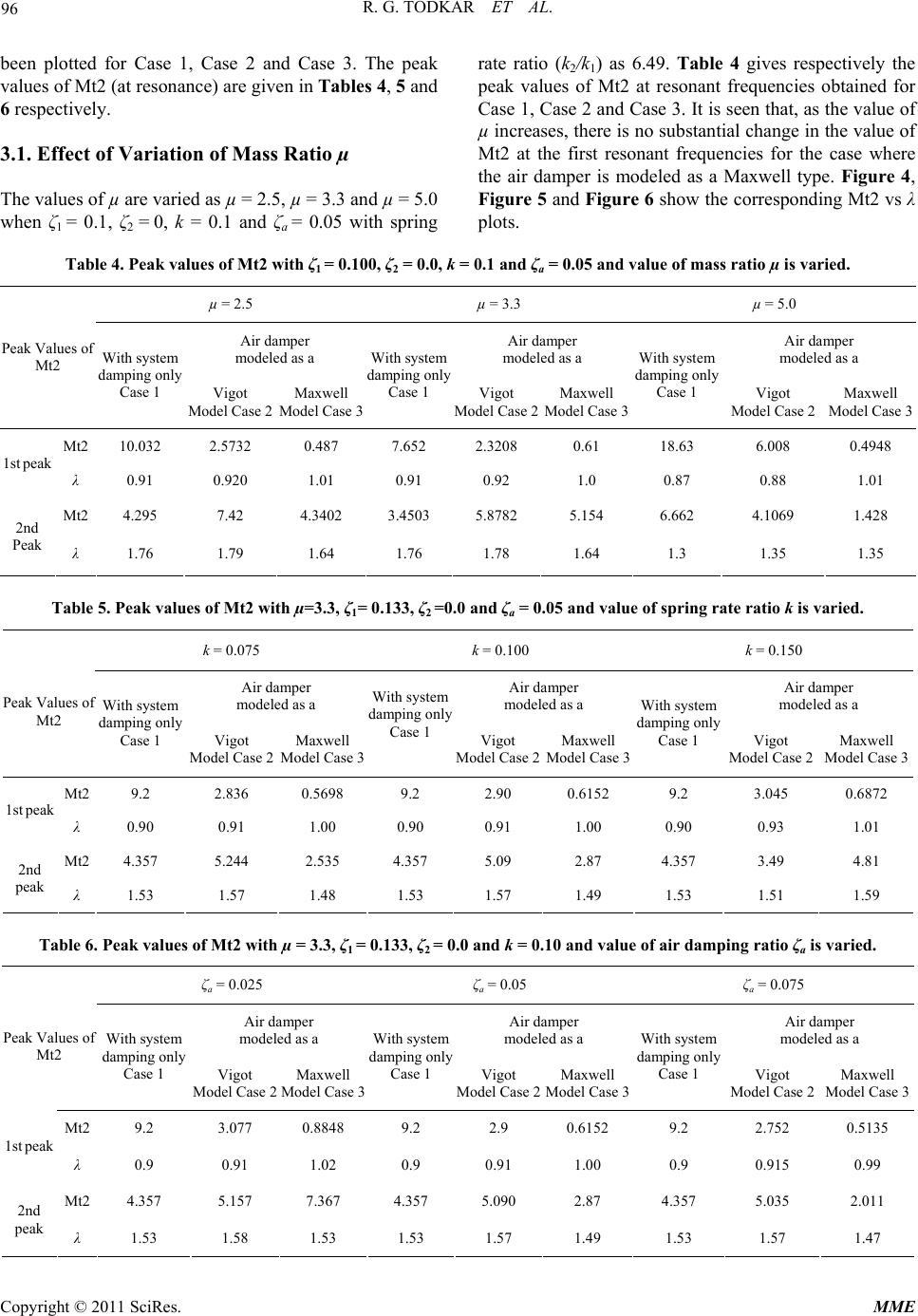 R. G. TODKAR ET AL. 96 been plotted for Case 1, Case 2 and Case 3. The peak values of Mt2 (at resonance) are given in Tables 4, 5 and 6 respectively. 3.1. Effect of Variation of Mass Ratio µ The values of µ are varied as µ = 2.5, µ = 3.3 and µ = 5.0 when ζ1 = 0.1, ζ2 = 0, k = 0.1 and ζa = 0.05 with spring rate ratio (k2/k1) as 6.49. Table 4 gives respectively the peak values of Mt2 at resonant frequencies obtained for Case 1, Case 2 and Case 3. It is seen that, as the value of µ increases, there is no substantial change in the value of Mt2 at the first resonant frequencies for the case where the air damper is modeled as a Maxwell type. Figure 4, Figure 5 and Figure 6 show the corresponding Mt2 vs λ plots. Table 4. Peak values of Mt2 with ζ1 = 0.100, ζ2 = 0.0, k = 0.1 and ζa = 0.05 and value of mass ratio µ is varied. µ = 2.5 µ = 3.3 µ = 5.0 Air damper modeled as a Air damper modeled as a Air damper modeled as a Peak Values of Mt2 With system damping only Case 1 Maxwell Model Case 3 With system damping only Case 1 Vigot Vigot Model Case 2 Model Case 2 Maxwell Model Case 3 With system damping only Case 1 Vigot Model Case 2 Maxwell Model Case 3 Mt2 10.032 2.5732 0.487 7.652 2.3208 0.61 18.63 6.008 0.4948 1st peak λ 0.91 0.920 1.01 0.91 0.92 1.0 0.87 0.88 1.01 Mt2 4.295 7.42 4.3402 3.4503 5.8782 5.154 6.662 4.1069 1.428 2nd Peak λ 1.76 1.79 1.64 1.76 1.78 1.64 1.3 1.35 1.35 Table 5. Peak values of Mt2 with µ=3.3, ζ1= 0.133, ζ2 =0.0 and ζa = 0.05 and value of spring rate ratio k is varied. k = 0.075 k = 0.100 k = 0.150 Air damper modeled as a Air damper modeled as a Air damper modeled as a Peak Values o Mt2 With system damping only Case 1 Maxwell Model Case 3 With system damping only Case 1 Vigot Vigot Model Case 2 Model Case 2 Maxwell Model Case 3 With system damping only Case 1 Vigot Model Case 2 Maxwell Model Case 3 Mt2 9.2 2.836 0.5698 9.2 2.90 0.6152 9.2 3.045 0.6872 1st peak λ 0.90 0.91 1.00 0.90 0.91 1.00 0.90 0.93 1.01 Mt2 4.357 5.244 2.535 4.357 5.09 2.87 4.357 3.49 4.81 2nd peak λ 1.53 1.57 1.48 1.53 1.57 1.49 1.53 1.51 1.59 Table 6. Peak values of Mt2 with µ = 3.3, ζ1 = 0.133, ζ2 = 0.0 and k = 0.10 and value of air damping ratio ζa is varied. ζa = 0.025 ζa = 0.05 ζa = 0.075 Air damper modeled as a Air damper modeled as a Air damper modeled as a Peak Values of Mt2 With system damping only Case 1 Maxwell Model Case 3 With system damping only Case 1 Vigot Vigot Model Case 2 Model Case 2 Maxwell Model Case 3 With system damping only Case 1 Vigot Model Case 2 Maxwell Model Case 3 Mt2 9.2 3.077 0.8848 9.2 2.9 0.6152 9.2 2.752 0.5135 1st peak λ 0.9 0.91 1.02 0.9 0.91 1.00 0.9 0.915 0.99 Mt2 4.357 5.157 7.367 4.357 5.090 2.87 4.357 5.035 2.011 2nd peak λ 1.53 1.58 1.53 1.53 1.57 1.49 1.53 1.57 1.47 Copyright © 2011 SciRes. MME 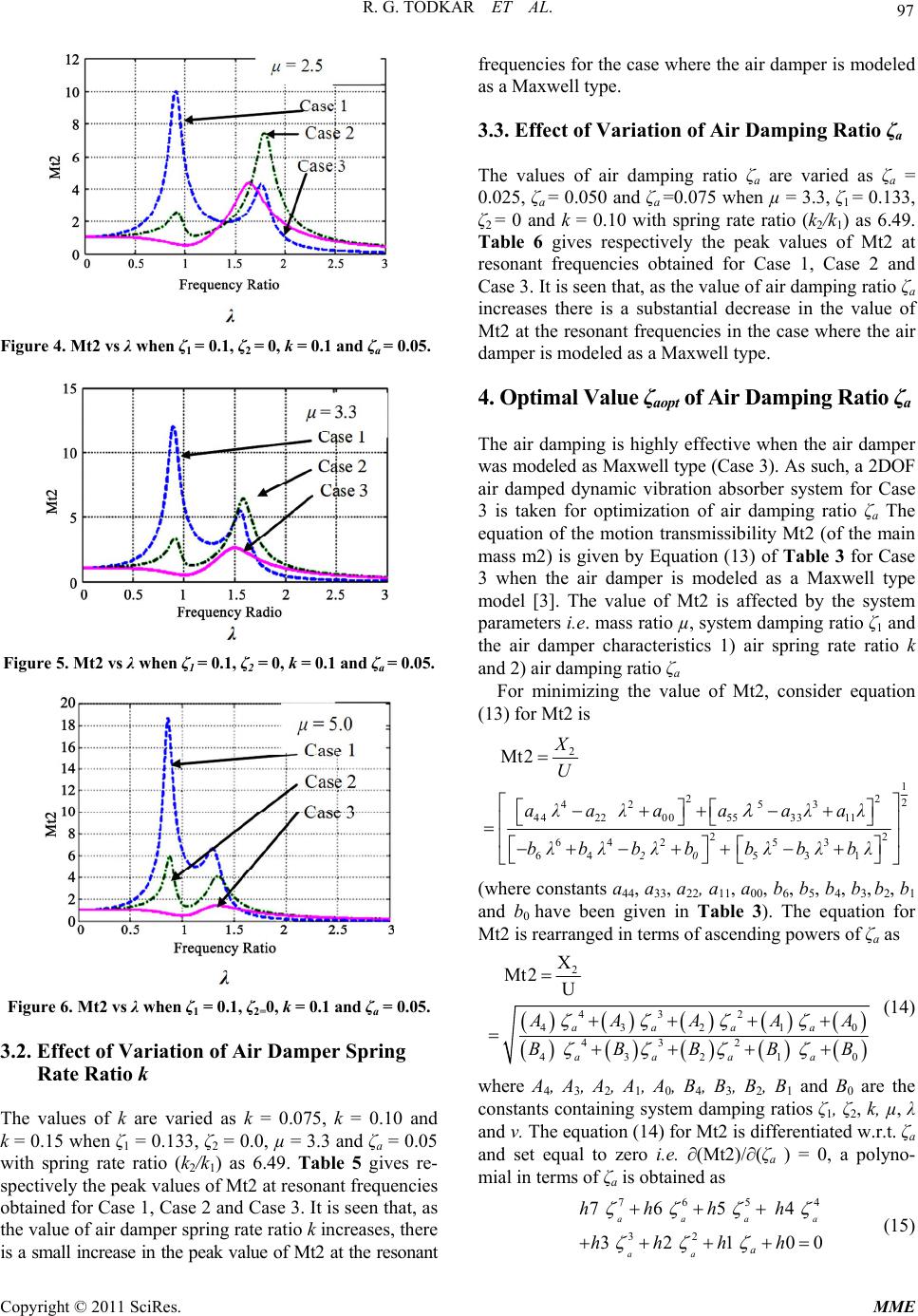 97 R. G. TODKAR ET AL. Figure 4. Mt2 vs λ when ζ1 = 0.1, ζ2 = 0, k = 0.1 and ζa = 0.05. Figure 5. Mt2 vs λ when ζ1 = 0.1, ζ2 = 0, k = 0.1 and ζa = 0.05. Figure 6. Mt2 vs λ when ζ1 = 0.1, ζ2=0, k = 0.1 and ζa = 0.05. 3.2. Effect of Variation of Air Damper Spring Rate Ratio k The values of k are varied as k = 0.075, k = 0.10 and k = 0.15 when ζ1 = 0.133, ζ2 = 0.0, µ = 3.3 and ζa = 0.05 with spring rate ratio (k2/k1) as 6.49. Table 5 gives re- spectively the peak values of Mt2 at resonant frequencies obtained for Case 1, Case 2 and Case 3. It is seen that, as the value of air damper spring rate ratio k increases, there is a small increase in the peak value of Mt2 at the resonant frequencies for the case where the air damper is modeled as a Maxwell type. 3.3. Effect of Variation of Air Damping Ratio ζa The values of air damping ratio ζa are varied as ζa = 0.025, ζa = 0.050 and ζa =0.075 when µ = 3.3, ζ1 = 0.133, ζ2 = 0 and k = 0.10 with spring rate ratio (k2/k1) as 6.49. Table 6 gives respectively the peak values of Mt2 at resonant frequencies obtained for Case 1, Case 2 and Case 3. It is seen that, as the value of air damping ratio ζa increases there is a substantial decrease in the value of Mt2 at the resonant frequencies in the case where the air damper is modeled as a Maxwell type. 4. Optimal Value ζaopt of Air Damping Ratio ζa The air damping is highly effective when the air damper was modeled as Maxwell type (Case 3). As such, a 2DOF air damped dynamic vibration absorber system for Case 3 is taken for optimization of air damping ratio ζa The equation of the motion transmissibility Mt2 (of the main mass m2) is given by Equation (13) of Table 3 for Case 3 when the air damper is modeled as a Maxwell type model [3]. The value of Mt2 is affected by the system parameters i.e. mass ratio µ, system damping ratio ζ1 and the air damper characteristics 1) air spring rate ratio k and 2) air damping ratio ζa For minimizing the value of Mt2, consider equation (13) for Mt2 is 2 1 22 2 42 53 4 4220 0553311 22 64 253 64 531 Mt2 20 X U aλaλaaaλaλ bλbλbλbbλbλbλ (where constants a44, a33, a22, a11, a00, b6, b5, b4, b3, b2, b1 and b0 have been given in Table 3). The equation for Mt2 is rearranged in terms of ascending powers of ζa as 2 432 4321 432 4321 X Mt2 U aaaa aaaa 0 0 AA A BBBB A B 4 a (14) where A4, A3, A2, A1, A0, B4, B3, B2, B1 and B0 are the constants containing system damping ratios ζ1, ζ2, k, µ, λ and v. The equation (14) for Mt2 is differentiated w.r.t. ζa and set equal to zero i.e. ∂(Mt2)/∂(ζa ) = 0, a polyno- mial in terms of ζa is obtained as 765 32 7 6 5 4 3 2 1 00 aaa aa a hhhh hhhh (15) Copyright © 2011 SciRes. MME 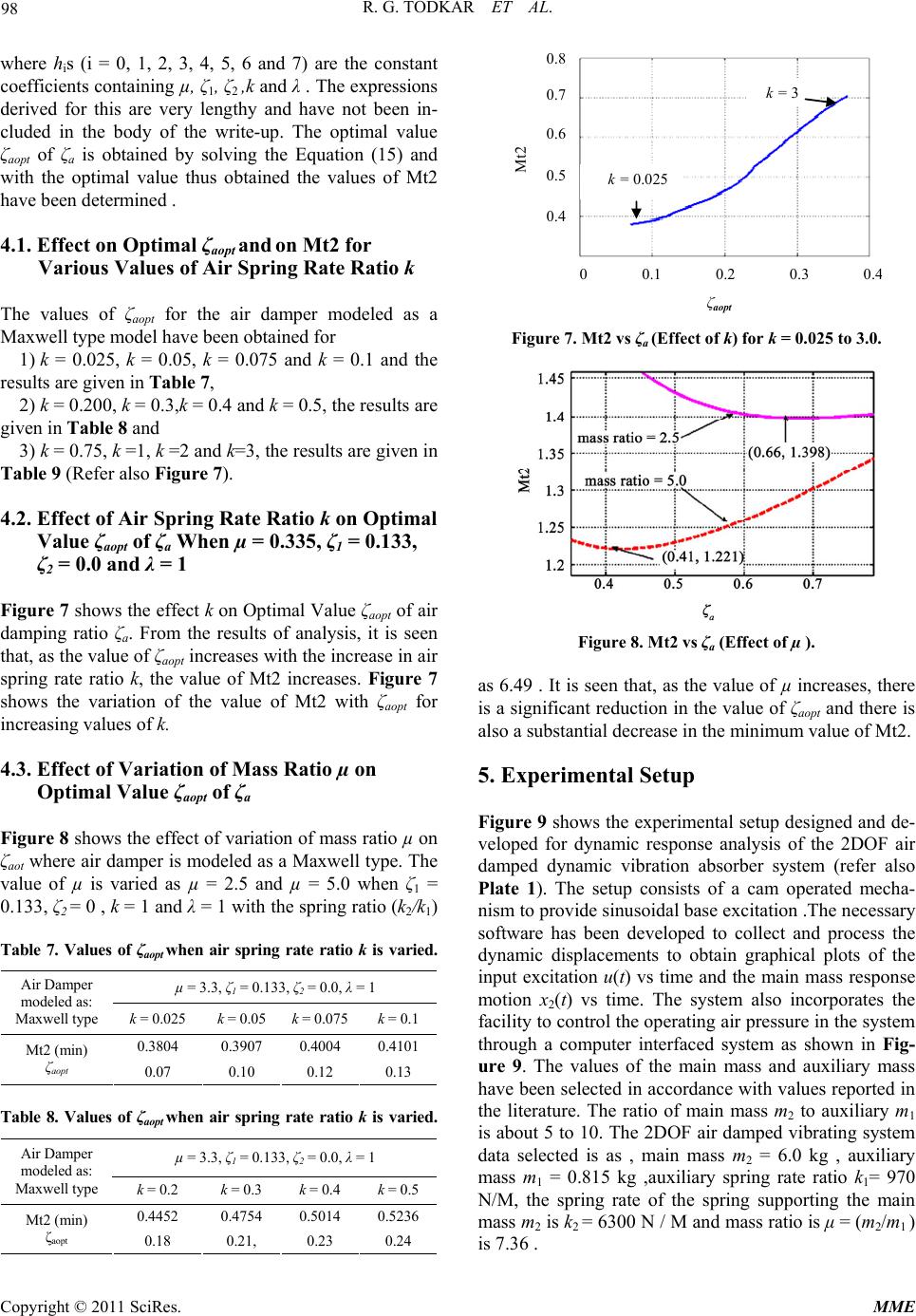 R. G. TODKAR ET AL. 98 where his (i = 0, 1, 2, 3, 4, 5, 6 and 7) are the constant coefficients containing µ, ζ1, ζ2 ,k and λ . The expressions derived for this are very lengthy and have not been in- cluded in the body of the write-up. The optimal value ζaopt of ζa is obtained by solving the Equation (15) and with the optimal value thus obtained the values of Mt2 have been determined . 4.1. Effect on Optimal ζaopt and on Mt2 for Various Values of Air Spring Rate Ratio k The values of ζaopt for the air damper modeled as a Maxwell type model have been obtained for 1) k = 0.025, k = 0.05, k = 0.075 and k = 0.1 and the results are given in Table 7, 2) k = 0.200, k = 0.3,k = 0.4 and k = 0.5, the results are given in Table 8 and 3) k = 0.75, k =1, k =2 and k=3, the results are given in Table 9 (Refer also Figure 7). 4.2. Effect of Air Spring Rate Ratio k on Optimal Value ζaopt of ζa When µ = 0.335, ζ1 = 0.133, ζ2 = 0.0 and λ = 1 Figure 7 shows the effect k on Optimal Value ζaopt of air damping ratio ζa. From the results of analysis, it is seen that, as the value of ζaopt increases with the increase in air spring rate ratio k, the value of Mt2 increases. Figure 7 shows the variation of the value of Mt2 with ζaopt for increasing values of k. 4.3. Effect of Variation of Mass Ratio µ on Optimal Value ζaopt of ζa Figure 8 shows the effect of variation of mass ratio µ on ζaot where air damper is modeled as a Maxwell type. The value of µ is varied as µ = 2.5 and µ = 5.0 when ζ1 = 0.133, ζ2 = 0 , k = 1 and λ = 1 with the spring ratio (k2/k1) Table 7. Values of ζaopt when air spring rate ratio k is varied. µ = 3.3, ζ1 = 0.133, ζ2 = 0.0, λ = 1 Air Damper modeled as: Maxwell type k = 0.025 k = 0.05 k = 0.075 k = 0.1 0.3804 0.3907 0.4004 0.4101 Mt2 (min) ζaopt 0.07 0.10 0.12 0.13 Table 8. Values of ζaopt when air spring rate ratio k is varied. µ = 3.3, ζ1 = 0.133, ζ2 = 0.0, λ = 1 Air Damper modeled as: Maxwell type k = 0.2 k = 0.3 k = 0.4 k = 0.5 0.4452 0.4754 0.5014 0.5236 Mt2 (min) ζaopt 0.18 0.21, 0.23 0.24 k = 3 k = 0.025 ζ aopt 0.8 0.7 0.6 0.5 0.4 0 0.1 0.2 0.3 0. Mt2 Figure 7. Mt2 vs ζa (Effect of k) for k = 0.025 to 3.0. Figure 8. Mt2 vs ζa (Effect of µ ). as 6.49 . It is seen that, as the value of µ increases, there is a significant reduction in the value of ζaopt and there is also a substantial decrease in the minimum value of Mt2. 5. Experimental Setup Figure 9 shows the experimental setup designed and de- veloped for dynamic response analysis of the 2DOF air damped dynamic vibration absorber system (refer also Plate 1). The setup consists of a cam operated mecha- nism to provide sinusoidal base excitation .The necessary software has been developed to collect and process the dynamic displacements to obtain graphical plots of the input excitation u(t) vs time and the main mass response motion x2(t) vs time. The system also incorporates the facility to control the operating air pressure in the system through a computer interfaced system as shown in Fig- ure 9. The values of the main mass and auxiliary mass have been selected in accordance with values reported in the literature. The ratio of main mass m2 to auxiliary m1 is about 5 to 10. The 2DOF air damped vibrating system data selected is as , main mass m2 = 6.0 kg , auxiliary mass m1 = 0.815 kg ,auxiliary spring rate ratio k1= 970 N/M, the spring rate of the spring supporting the main mass m2 is k2 = 6300 N / M and mass ratio is μ = (m2/m1 ) is 7.36 . Copyright © 2011 SciRes. MME  R. G. TODKAR ET AL. Copyright © 2011 SciRes. MME 99 Figure 9. Experimental setup for 2DOF dynamic vibration absorber system (µ >> 1 ). Plate 1. Experimental detup for an air damped 2DOF vibration absorber system.  R. G. TODKAR ET AL. 100 5.1. Specifications of the Air Damper Using the approach of R.D.Cavanaugh [3] for the design of air damper, following relations have been developed [4,5]. 1) 2 2s ac knvpiN t (15) 2) 0.5 4 0.5 1e Q apipe tpip lpiNd where 1 Q128 sπ2 oc vnm 1 (16) Using these relations, a cylinder-piston and air-tank type air damper has been developed [3]. The specifica- tions of the developed air damper are : piston diameter dp = 29.85 mm cylinder bore dc = 30.00 mm., piston rod diameter dr = 10.00 mm, piston length lp = 13.0mm. and height of piston bottom from the cylinder bottom hp = 15.00 mm In the experimental investigation, the first step was to select the value of the air damping ratio ζa associ- ated with the air spring rate ratio k to be set and the cor- responding set of capillary pipe dimensions like pipe diameter dpipe and pipe length lpipe. The ratio (pi/Nt), where pi is the operating air pressure and Nt is the ratio (v.t/vc) is the basis for the selection of the air damping ratio ζa (also refer Figure 10 and Figure 11).The para- meters dpipe, lpipe and the ratio (pi/Nt) have been varied to change the value of damping ratio ζa in the system. (pi / Nt) d. - - - .... c = 10 mm d c = 20 mm. ___ d c = 30 mm. Figure 10. k vs (pi/Nt). (pi / Nt ) ζ a .... d. d. ___ d pipe = 2.5 mm - - - pipe = 2.0 mm pipe = 1.5 mm for l pipe = 3.0 m Figure 11. ζa vs (pi/Nt). 5.2. Air Pressure Control A computer interfacing system containing the closed loop air pressure control system with a set of two LVDTs to sense the main mass displacement x2(t) and base exci- tation u(t) has been developed .The ratio (pi/Nt) plays an important role in controlling the air damping ratio ζa in the system. The appropriate value of the ratio (pi/Nt), depending on the value of ζa desired in the system can be set by controlling the value of operating air pressure pi for a given value of the ratio Nt= (vt/vc) or keeping the air pressure in the system at atmospheric pressure and adjusting the value of Nt by adjusting the tank volume vt. 6. Experimental Analyses 6.1. Experimental Curves for Motion Transmissibility Mt2 vs Frequency Ratio λ Using the experimental setup (shown in Figure 9 and Plate 1) and by setting the appropriate values of the air spring rate ratio k and the air damping ratio ζa, the ex- perimental plots of Mt2 vs λ have been obtained for the following cases 1) With µ = 1.5, ζ1 = 0.133, ζ2 = 0 and without air damper.(Refer Figure 12 and Table 10 ). 2) With µ = 1.0, ζ1 = 0.133, ζ2 = 0 and air damper, with k = 0.423 and ζa = 0.1326 (Refer Figure 13 and Table 11) 3) With µ = 1.5, ζ1 = 0.133, ζ2 = 0 and air damper, with k = 0.423 and ζa = 0.1326 (Refer Figure 14 and Table 11). 6.2. Experimental Curves Mt2 vs λ for Using Optimal Values of Air Damping Ratio ζaopt Table 12 shows the theoretical and experimental peak values of motion transmissibility Mt2 at resonant fre- quency with the air damper set for the optimal air damp- ing ratio ζaopt: k = 0.1 with ζaopt = 0.53 and k = 0.4 with ζaopt = 0.68. The experimental results have been shown in Figure 15 and Figure 16. Figure 12. Mt1 vs λ for Case 6.1 (i). Copyright © 2011 SciRes. MME  101 R. G. TODKAR ET AL. Table 10. Peak values of Mt2 for Case 6.1 (i). Peak Values of Mt2 Theoretical Results Experimental Results Mt2 6.235 5.50 1st peak λ 0.92 1.179 Figure No. 12 Figure 13. Mt2 vs λ for 6.1 (ii), µ = 1.0, k = 0.423 and ζa = 0.1326. Table 11. Peak values of Mt2 for the Case 6.1 (ii) and for the Case 6.1 (iii) with ζ1 = 0.133, ζ2 = 0.0. µ = 1.0, k = 0.423 and ζa = 0.1326 µ = 1.5, k = 0.423 and ζa = 0.1326 Peak Values of Mt2 Theoretical Values Experimental Values Theoretical Values Experimental Values Mt2 5.689 3.33 6.13 3.33 1st peak λ 0.92 1.35 0.92 1.32 Figure No. 13 14 Figure 14. Mt2 vs λ for 6.1 (iii), µ = 1.5, k = 0.423 and ζa = 0.1326. Table 12. Peak values of Mt2 with optimal valve of optimal air damping ratio ζaopt with µ = 1.5, ζ1= 0.133, ζ2 = 0.0. Theoretical Values Experimental Values Theoretical Values Experimental Values Peak Values of Mt2 k =0.1, ζaopt = 0.53 k = 0.4, ζaopt=0.68 Mt22.535 1.74 1.623 1.5 1st peak λ 1.03 1.0 1.19 1.48 Figure No.15 16 Figure 15. Mt2 vs λ. For µ = 1.5, ζ1 = 0.133, k = 0.1, ζaopt = 0.53. Figure 16. Mt2 vs λ. µ = 1.5, ζ1 = 0.133, k = 0.4, ζaopt = 0.68. 7. Conclusions In this paper, the effect of mass ratio and the air damper characteristics on the resonant response of an air damped 2DOF vibrating system representing an air damped dy- namic vibration absorber model have been studied with the air damper modeled as a Maxwell type . There is no substantial change in the value of Mt2 with the increase Copyright © 2011 SciRes. MME  R. G. TODKAR ET AL. Copyright © 2011 SciRes. MME 102 in the value of mass ratio µ. However, with the increase in the value of the air spring rate ratio k there is a con- siderable increase in the value of the Mt2 at the resonant frequency where the air damper is modeled as a Maxwell type. It is seen that, with the increase in the value of the air damping ratio ζa there is a considerable decrease in the value of the Mt2 at the resonant frequency where the air damper is modeled as a Maxwell type. Further it is seen that as the value of the air spring rate ratio k in- creases , the value of the optimum value ζaopt of the air damping ratio ζa increases with increase in the value of motion transmissibility Mt2. It is also observed that there is a considerable reduction in the value of ζaopt with the increase in the value of the mass ratio µ, in the range µ = 2.5 to µ = 5.0. An experimental setup has been devel- oped with an appropriate air pressure control system. A cylinder-piston and air-tank type air damper has been designed and developed to obtain the desired value of the air damping ratio ζa from the air damper. From the re- sults of the experimental analysis shown in Figure 13 and Figure 14, it is seen that the experimental peak val- ues of Mt2 are close to the corresponding theoretical peak values of Mt2 obtained from the theoretical analysis where the air damper is modeled as a Maxwell type. From the Figure 15 and Figure 16, it is seen that the theoretical and experimental values of Mt2 for ζaopt = 0.53 with k = 0.1 and ζaopt = 0.68 with k = 0.40 are in good agreement. From the theoretical and experimental investigations carried out, it is seen that the addition of the air damping in the absorber system (m1,k1) improves substantially the motion transmissibility characteristics of the main mass of the 2DOF dynamic vibration absorber model over a range of excitation frequencies in the region of reso- nance. 8. Acknowledgements The first author Prof. R.G.Todkar acknowledges with thanks the authorities of P.V.P.Institute of Technology, Budhgaon, Dist. SANGLI (Maharashtra) INDIA 416 304 for their support and encouragement during the period of this work. 9. References [1] R. A. Williams, “Electronically Controlled Automotive Suspension Systems,” Computing and Control Engineer- ing Journal, Vol. 5, No. 3, 1994, pp. 143-148. doi:10.1049/cce:19940310 [2] T. Asami and Nishihara, “Analytical and Experimental Evaluation of an Air Damped Dynamic Vibration Ab- sorber: Design Optimizations of the Three-Element Type Model,” Transaction of the ASME, Vol. 121, 1999, pp. 334-342. [3] R. D. Cavanaugh, “Hand Book of Shock and Vibration,” Air Suspension Systems and Servo-controlled Isolation Systems, Chapter 33, pp. 1-26. [4] R. G. Todkar and S. G. Joshi, “Some Studies on Trans- missibility Characteristics of a 2DOF Pneumatic Semi- active Suspension System”, Proceedings of International Conference on Recent Trends in Mechanical Engineering, Ujjain Engineering College, Ujjain, 4-6 October 2007, pp. 19-28. [5] P. Srinivasan, “Mechanical Vibration Analysis,” Tata Mc-Hill Publishing Co., New Delhi, 1990.  103 R. G. TODKAR ET AL. Nomenclature k1 stiffness of spring for absorber mass k2 stiffness of spring for main mass m1 absorber mass m2 main mass µ mass ratio = (m2/m1) w1 (k1/m1)1/2 w2 (k2/m2)1/2 v natural frequency ratio = (w2/w1) ζ1 system damping ratio for main mass system ζ2 system damping ratio for auxikary mass system w applied frequency λ frequency ratio = (w/w1) dp piston diameter dc cylinder bore lp length of the piston hp height of piston from bottom of the cylinder dpipe inside diameter of the capillary pipe lpipe length of the capillary pipe µo viscosity of air n index of expansion of the air ka stiffness of air spring k spring rate ratio = (ka/k1) wa (ka/m1 )1/2 ca coefficient of viscous damping of the air damper ζa damping ratio provided by the air spring ζaopt optimal value of air damping ratio u(t) base excitation x1(t)dynamic displacement response auxiliary mass m1 x2(t)dynamic displacement response of main mass m2 Mt1 motion transmissibility of the auxiliary mass m1 Mt2 motion transmissibility of the main mass m2 Copyright © 2011 SciRes. MME
|