 Applied Mathematics, 2011, 2, 1339-1345 doi:10.4236/am.2011.211187 Published Online November 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM New Approach of Stability for Time-Delay Takagi-Sugeno Fuzzy System Based on Fuzzy Weighting-Dependent Lyapunov Functionals Yassine Manai, Mohamed Benrejeb, Pierre Borne L.A.R.A. Automatique, Ecole Nationale d’Ingénieurs de Tunis, Le Belvédère, Tunis, Tunisie E-mail: yacine.manai@gmail.com, mohamed.benrejeb@enit.rnu.tn, p.borne@ec-lille.fr Received February 19, 2011; revised May 25, 2011; accepted June 3, 2011 Abstract This paper deals with the stability of Takagi-Sugeno fuzzy models with time delay. Using fuzzy weighting- dependent Lyapunov-Krasovskii functionals, new sufficient stability criteria are established in terms of Lin- ear Matrix Inequality; hence the stability bound of upper bound delay time can be easily estimated. Finally, numeric simulations are given to validate the developed approach. Keywords: Takagi-Sugeno Fuzzy Models, Linear Matrix Inequalities LMIs, Fuzzy Weighting-Dependent Lyapunov-Krasovskii Functionals 1. Introduction Fuzzy control systems have experienced a big growth of industrial applications in the recent decades, because of their reliability and effectiveness. Many researches are investigated on the Takagi-Sugeno fuzzy models [1-17] which can associate the flexible fuzzy logic theory and rigorous mathematical theory into a unified framework. Thus, it becomes a powerful tool in approximating a complex nonlinear system. Recently, Takagi-Sugeno fuzzy model approach has been used to examine nonlinear systems with time-delay, and different methodologies have been proposed for ana- lysis and synthesis of this type of systems [1,2]. Time de- lay often occurs in many dynamical systems such as bio- logical systems, chemical system, metallurgical process- ing system and network system. Their existences are frequently a cause of infeasibility and poor performan- ces. The developed stability approaches can be classified into two types. The first one is called as the delay inde- pendent stability criteria which do not include any in- formation about the size of the time delay, whereas the second is called as the delay dependent stability criteria, in which the size of the time delay is taken explicitly in the formulation. It is generally recognized that delay de- pendent results are usually less conservative than delay independent ones, especially when the size of delay is small. Two classes of Lyapunov-Krasovskii functionals are used to analysis these systems: quadratic Lyapunov- Krasovskii functionals and non-quadratic Lyapunov- Krasovskii ones. The use of first class brings much con- servativeness in the stability test. In order to reduce the conservatism entailed in the previous results using quad- ratic functionals, a fuzzy weighting dependent approach is presented recently in [3] for fuzzy systems with fuzzy weighting functions. In this paper, a new stability conditions for time-delay Takagi-Sugeno fuzzy systems by using fuzzy weighting- dependent Lyapunov-Krasovskii functionals are pre- sented. We derive delay-dependent stability conditions using recent technique called free-weighting matrix me- thod [4]. This criterion is expressed in terms of Linear Matrix Inequalities (LMIs) which can be efficiently sol- ved by using various convex optimization algorithms [6,15]. The proposed approach improves existing ones in [4]. The organization of the paper is as follows. In Section 2, we present the system description and problem for- mulation and we give some preliminaries which are needed to derive results. Section 3 will be concerned to stability analysis for time-delay T-S fuzzy systems. Illus- trative example is given in Section 4 for a comparison of previous results to demonstrate the advantage of pro- posed method. Finally Section 5 makes conclusion.  Y. MANAI ET AL. 1340 Notation: Throughout this paper, a real symmetric ma- trix denotes being a positive definite matrix. The superscript “T” is used for the transpose of a matrix. And where an ellipsis “” denotes a block induced eas- ily by symmetry. 0SS 2. System Description and Preliminaries Consider a T-S fuzzy continuous model with time-delay for a nonlinear system as follows: 11 0 If is andand is Then ,,0 ip ii zt Mzt M xtAxt A t ip t xtt t (1) where 1, 2,,,1, 2,, ij irj m ut p is the fuzzy set and r is the number of model rules; is the state vector, is the input vector, n xt i Ann , are constant real matrices, and are known premise variables, nn ,, p z t i A 1 zt t is a continuous vector-valued initial function on 0,0 ; the time-delay may be unknown but is assumed to be smooth function of time. t 0 0, ttd 1, where 00 and are two scalars. d The final outputs of the fuzzy systems are: 1 r iii i xth ztAxtAt t (2) 0 , ,0 ,xtt t where 12 ,, p ztz tztzt 1 r ii i i hzt wztwzt , for all t. 1 p iij j wztMz t j The term 1ij zt 1i is the grade of membership of in j zt Since 1 0 0, 1,2,, i i i wzt wzti r r we have 1 1 0, 1,2,, r i i i hzt hzti r for all t. (3) The time derivative of premise membership functions is given by: 1 dd dd s i ii l zt xtxt h hzt zt xttt lil (4) We have the following property: 1 0. r k k hzt (5) Assumption 1 The time derivative of the premises membership func- tion is upper bounded such that k hk , for 1, ,kr , where, ,1,, kkr are given positive constants. Lemma 1[4] Under assumption 1, the time-delay Takagi-Sugeno fuzzy system is stable if there exist positive definite symmetric matrices 0, j P0,Q0,Z Y and , T 1, 2,,,jr such that the following LMIs hold. ,1,, kr PP kr 1 (6) 0, , ij jiij (7) where 1 1 00 00 0 0 1 0 ij r kk r k TTT iijjijjij T jj TT ji PP PAA PPAYTAZY YYQ TTdQ AZT Z j Lemma 2[4] Under assumption1, system (2) with is asym- ptotically stable if there exist matrices 0 d 0, j P , 0, j W 0, j S0,Q,U0,R0,Z Y T and , N 1, 2,,j,r such that the following LMIs hold: , 1,2,,1, kk rr kr PW PW kr SS 0, QU R 0, , ij jiij where 11 12 00 22 00 0 0 0 , 00 i ij TT ijijij jj TT ijj jj j ARZW NY ARZS N UT RZ RN Copyright © 2011 SciRes. AM  Y. MANAI ET AL.1341 1 11 1 r ijk krji k TT T ij jj PP PUA PUY YQ 1 12 1i rTT ijkkrji jjj k WWPUA AWYY 1 22 1 . ii rTT T ijk krjjjj k SSTTWAAWQ 3. Main Results Consider the open-loop system (2). The aim of this sec- tion is to find conditions for the stability of the unforced time-delay T-S fuzzy system by using the Lyapunov- Krasovskii theory. Theorem 1 Under assumption 1, the time-delay Takagi-Sugeno fuzzy system is stable if there exist positive definite symmetric matrices 0, j P0,Q0,Z, T X Y and Tj such that the following LMIs hold. 1, 2,j, ,r 0,1, , k PX k r (8) 0, , ij jiij (9) where 1 00 00 0 0 1 0 ij r kk k TTT iijjijjij T jj TT ji PX PAA PPAYTAZY YY Q TTdQ AZT Z j 3 Proof Let consider the fuzzy weighting-dependent Lyapunov– Krasovskii functional as 12t VxV VV (10) where ,, t xxt 0 , and 1 1 r T jj j Vxt htPxt (11) 2d t T tt VxsQxs s (12) 0 0 3dd. tT t VxsZxss (13) The Newton-Leibniz formula gives d d t tt which yields 2 d0 T T t tt xt YtxttTt xtxttxss (14) where 1 r j j Yth tY and 1 r j j Tth tT and where and j YT r are arbitrary matrices with appro- priate dimensions, 1,2,,j . With (14), the time de- rivative of t Vx with respect to t along solutions to (2) is given by: 0 11 0 11 0 2 1 d 2 1 d t rr TT jj jj jj T T t TT t rr TT kk jj kj T T TT t Vx th tPxtxthtPxt tQxt txttQxtt xtZxtxsZxs s htxtPxtxthtPxt tQtxtdxt tQxt t xtZxtxsZxs s 0 2 d t T T t tt xt YtxttTt xtxttxs s (15) where the inequality is caused only by 0 and .td t Based on (5), it follows that 10, r k khX X where symmetric matrix of proper dimension. Adding to (15), and by substitution of t with state Equation (2), we have 0 1 0 1 d 2 d rT tk k k T TTTT T T t TT t T T t tt VxhtxtPXxt xtPtAtxtAtxtt xtA txttAtPtxt tQtxtdxt tQxt t xtZxtxsZxs s xt YtxttTt xtxttxs s d, ttxtxs Then, based on assumption 1 and if (8) holds, (15) yields to s Copyright © 2011 SciRes. AM 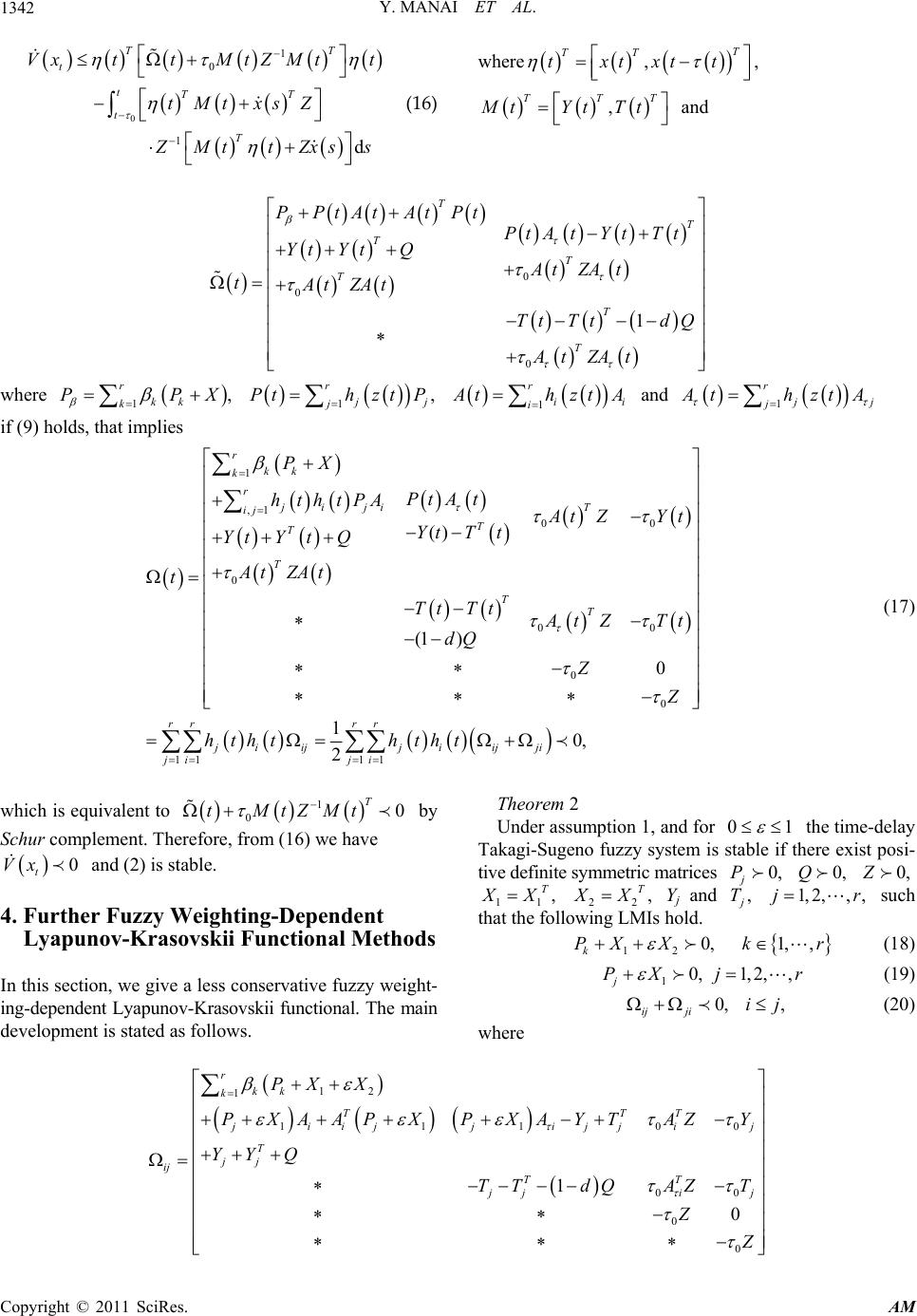 Y. MANAI ET AL. Copyright © 2011 SciRes. AM 1342 0 1 0 1 d TT t tTT t T VxttMtZMtt tMt xsZ Mtt Zxss where ,T TT txtxtt , TTT , tYtTt and (16) 0 0 0 1 T T T T T T T PPtAtAtPt PtA tYtTt Yt YtQ AtZA t tAtZAt Tt TtdQ At ZAt where 1, r kk k PX 1, r j j Pth ztP 1 r ii i thzt A and 1 r j j thztA if (9) holds, that implies 1 ,1 00 0 00 0 0 11 11 () (1 ) 0 10, 2 r kk k r T ji ji ij T T T T T rr rr ji ijjiijji ji ji PX Pt At hthtPA tZ Yt YtTt YtY tQ At ZAt t Tt Tt tZ Tt dQ Z htht htht 1 (17) Theorem 2 which is equivalent to by Schur complement. Therefore, from (16) we have and (2) is stable. 1 00 T tMtZMt 0 t Vx Under assumption 1, and for 0 0, j P the time-delay Takagi-Sugeno fuzzy system is stable if there exist posi- tive definite symmetric matrices 11 0,Q0,Z , T X 22 , T X Yj and , T such that the following LMIs hold. 1, 2,,jr, 4. Further Fuzzy Weighting-Dependent Lyapunov-Krasovskii Functional Methods 12 0,1,, k PX Xkr r (18) 10, 1,2,, j PX j (19) In this section, we give a less conservative fuzzy weight- ing-dependent Lyapunov-Krasovskii functional. The main development is stated as follows. 0, , ij jiij (20) where 12 1 1110 00 0 0 1 0 r kk k TT 0 T iijjijjij T jj ij TT ji PX X PXAAPX PXAYTAZY YY Q TTdQAZ T Z j  Y. MANAI ET AL. Copyright © 2011 SciRes. AM 1343 Proof Let consider the fuzzy weighting-dependent Lyapunov- Krasovskii functional as 12t VxV VV 3 (21) where ,, t xxt 0 , and 11 1 r T jj j VxthtP Xxt (22) 2d t T tt VxsQxs s (23) 0 0 3dd. tT t VxsZxss (24) The Newton-Leibniz formula gives d, t tdt tdt xtxss which yields 2 d0 T T t tt xt YtxttTt xtxttxss (25) where 1 r j j Yth tY and 1 r j j Tth tT and where and j YT 1, 2,j are arbitrary matrices with appro- priate dimensions, . With (14), the time de- rivative of ,r t Vx with respect to t along solutions to (2) is given by: 0 1 1 1 1 0 1 1 1 1 2 1 d 2 r T tjj j r T jj j T T t TT t rT kk k r T jj j T Vxxth tPXxt xthtPXxt tQxttxttQxtt xtZxtxsZxs s htxtPXxt xthtPXxt xtQtxt 0 0 1 d 2 d T t TT t T T t tt dxttQxtt xtZxtxsZxs s xt YtxttTt xtxttxs s (26) where the inequality is caused only by 0 and .td t Based on (5), it follows that 11 110, r k khXX and 22 10, r k khX X where 12 and X symmetric matrices of proper dimen- sion. Adding 12 and X to (15), and by substitution of t with state Equation (2), we have 0 12 1 0 1 d 2 d rT tk k k T TTTT T T t TT t T T t tt Vxh txtPXX xtPtAt xtAtxtt xtA txttAtPtxt tQtxtdxttQxtt xtZxtxsZxs s xt YtxttTt xtxttxs s where 1 1, r kk k Pth ztPX 1, r ii i thztA 1. r and j j thztA Then, based on assumption 1 and if (8) holds, (15) yields to 0 1 0 1 d TT t tTT t T VxttMtZMtt tMt xsZ Mtt Zxss (27) where ,T TT txtxtt , , TTT tYtTt and 0 0 0 1 T T T T T T T t PPtAtAtPt PtAtYtTt Yt YtQ AtZA t At ZAt Tt TtdQ At ZAt where 12 1 r kk k PPX X if (9) holds, that implies  Y. MANAI ET AL. Copyright © 2011 SciRes. AM 1344 1 ,1 00 0 00 0 0 11 11 () (1 ) 0 1 2 0, r ji jiT ij T T T T T rr ji ij ji rr j iijji ji PhthtPXA Pt At tZ Yt YtT t YtY tQAtZAt Tt Tt t tZ Tt dQ Z htht htht (28) which is equivalent to by 1 00 T tMtZMt Schur complement. Therefore, from (16) we have and (2) is stable. 0 t Vx 7. Numerical Examples In order to show the improvements of proposed approa- ches over some existing results, in this section, we pre- sent two numerical examples, which concern the feasi- bility of a time delay T-S fuzzy system. Indeed, we com- pare our fuzzy weighting-dependent Lyapunov-Krasov- skii approach (Theorem 1 and Theorem 2) with the Lemma 1 in [2]. Example 1. Consider the following T-S fuzzy system with time-delay: 1 0 , ,0, r iii i xth ztAxtAt t xtt t (29) with: 2r 1 3.2 0.6 02.1 A 2 0.9 0 11.6 A ,, , . 2 10 13 A 1 10.9 02 A The purpose is to compute the maximum value of 0 such that the fuzzy system is stable. Table 1 lists the computation results using delay-dependent conditions in Theorem1, and in Theorem 2 (0.1 ) compared with the existing delay-dependent method in Lemma1 in [2], for different values of d. It is seen from Table 1 that the largest values of 0 are obtain by using our methods. Example 2. Consider the time delay T-S fuzzy system (29). with: 2r 1 54 12 A ,2 24 20 2 A , , 1 0.5 0.6 10.4 A 2 0.3 0 0.5 0 A .4 . This example shows that the stability cannot be tested by quadratic methods while can be verified by our fuzzy weighting-dependent methods in Theorems. The purpose is to compute the maximum value of 0 such that the fuzzy system is asymptotically stable. Table 2 lists the computation results for different val- ues of d under the same upper bound 0.8 i . It reveals from Table 2 that Theorem 1 and Theorem 2 with 0.1 produces better results than Lemma 1 and Lemma 2. 8. Conclusions This paper provided new conditions for Delay-dependent Table 1. Comparison results of maximum τ0 for Example 1. Methods d = 0 d = 0.02 d = 0.1d = 0.9 Lemma 10.61850.5618 0.48090.4513 Theorem 10.61850.5618 0.48100.4530 β = 1 Theorem 2+∞ +∞ 0.55000.4689 Lemma 10.62480.5630 0.48140.4537 Theorem 10.62480.5630 0.48170.4562 β = 0.5 Theorem 2+∞ +∞ 0.55000.4695 Table 2. Comparison results of maximum τ0 for Example 2. Methods d = 0 d = 0 .5 d = 0.9 Lemma 1 0.3883 0.3225 0.2518 Lemma 2 +∞ 0.5221 0.2844 Theorem 1 +∞ 0.6933 0.3058 β = 0.8 Theorem 2 +∞ +∞ 0.8133  Y. MANAI ET AL.1345 stability problems of time-delay Takagi-Sugeno fuzzy systems in terms of a combination of the LMI approach and the use of fuzzy weighting-dependent Lyapunov- Krasovskii functionals. The stability conditions proposed in this note are less conservative than some of those in the literature, which has been illustrated via examples. 9. References [1] Y. Y. Cao and P. M. Frank, “Stability Analysis and Syn- thesis of Nonlinear Time-Delay Systems via Takagi- Sugeno Fuzzy Models,” Fuzzy Sets and Systems, Vol. 124 No. 2, 2001, pp. 213-229. doi:10.1016/S0165-0114(00)00120-2 [2] C. Lin, Q. G. Wang and T. H. Lee, “Delay-Dependent LMI Conditions for Stability and Stabilization of T-S Fuzzy Systems with Bounded Time-Delay,” Fuzzy Sets and Systems, Vol. 157 No. 9, 2006, pp. 1229-1247. doi:10.1016/j.fss.2005.10.001 [3] C. Lin, Q. G. Wang and T. H. Lee, “Fuzzy Weighting- Dependent Approach to H∞ Filter Design for Time-Delay Fuzzy Systems,” IEEE Transactions on Signal Process- ing, Vol. 55 No. 6, 2007, pp. 2746-2751. doi:10.1109/TSP.2007.893761 [4] C. Lin, Q. G. Wang and T. H. Lee, “LMI Approach to Analysis and Control of Takagi-Sugeno Fuzzy Systems with Time Delay,” Springer-Verlag, Berlin, 2007. [5] Y. Y. Cao and P. M. Frank. “Analysis and Synthesis of Nonlinear Time-Delay Systems via Fuzzy Control Ap- proach,” IEEE Transactions on Fuzzy Systems, Vol. 8, No. 2, 2000, pp. 200-211. doi:10.1109/91.842153 [6] K. Tanaka, T. Hori, and H. O. Wang, “A multiple Lya- punov Function Approach to Stabilization of Fuzzy Con- trol Systems,” IEEE Transactions on Fuzzy Systems, Vol. 11 No. 4, 2003, pp. 582-589. doi:10.1109/TFUZZ.2003.814861 [7] K. Tanaka and H. O. Wang, “Fuzzy Control Systems De- sign and Analysis: A Linear Matrix Inequality Appro- ach,” John Wiley and Sons, Hoboken, 2001. [8] L. A. Mozelli, R. M. Palhares, F. O. Souza and E. M. Mendes, “Reducing Conservativeness in Recent Stability Conditions of TS Fuzzy Systems,” Automatica, Vol. 45, No. 6, 2009, pp. 1580-1583. doi:10.1016/j.automatica.2009.02.023 [9] T. Takagi and M. Sugeno, “Fuzzy Identification of Sys- tems and Its Application to Modeling and Control,” IEEE Transactions on System, Man and Cybernetics, Vol. 15 No. 1, 1985, pp. 116-132. [10] L. K. Wong, F. H. F. Leung and P. K. S. Tam, “Stability Design of TS Model Based Fuzzy Systems,” Proceedings of the 6th IEEE International Conference on Fuzzy Sys- tems, Barcelona, 1-5 July 1997, pp. 83-86. doi:10.1109/FUZZY.1997.616349 [11] C. H. Fang, Y. S. Liu, S. W. Kau, L. Hong and C. H. Lee, “A New LMI-Based Approach to Relaxed Quadratic Sta- bilization of T-S Fuzzy Control Systems,” IEEE Transac- tions on Fuzzy Systems, Vol. 14, No. 3, 2006, pp. 386- 397. [12] H. O. Wang, K. Tanaka and M. F. Griffin, “An Approach to Fuzzy Control of Nonlinear Systems: Stability and De- sign Issues,” IEEE Transactions on Fuzzy Systems, Vol. 4, No. 1, 1996, pp. 14-23. doi:10.1109/91.481841 [13] K. Tanaka, T. Hori and H. O. Wang, “A Fuzzy Lyapunov Approach to Fuzzy Control System Design,” Proceedings of the 2001 American Control Conference, Arlington, 25-27 June 2001, pp. 4790-4795. [14] M. A. L. Thathachar and P. Viswanah, “On the Stability of Fuzzy Systems,” IEEE Transactions on Fuzzy Systems, Vol. 5, No. 1, 1997, pp. 145-151. doi:10.1109/91.554461 [15] C. W. Chen, “Stability Conditions of Fuzzy Systems and Its Application to Structural and Mechanical Systems,” Advances in Engineering Software, Vol. 37, No. 9, 2006, pp. 624-629. doi:10.1016/j.advengsoft.2005.12.002 [16] S. Boyd, L. Ghaoui, E. Feron and V. Balakrishnan, “Lin- ear Matrix Inequalities in Systems and Control Theory,” SIAM, Philadelphia, 1994. doi:10.1137/1.9781611970777 [17] Y. Manai and M. Benrejeb, “Stability for Continuous Takagi-Sugeno Fuzzy System Based on Fuzzy Lyapunov Function,” 2011 International Conference on Communi- cations, Computing and Control Applications, Hamma- met, 3-5 March 2011. doi:10.1109/CCCA.2011.6031521 Copyright © 2011 SciRes. AM
|