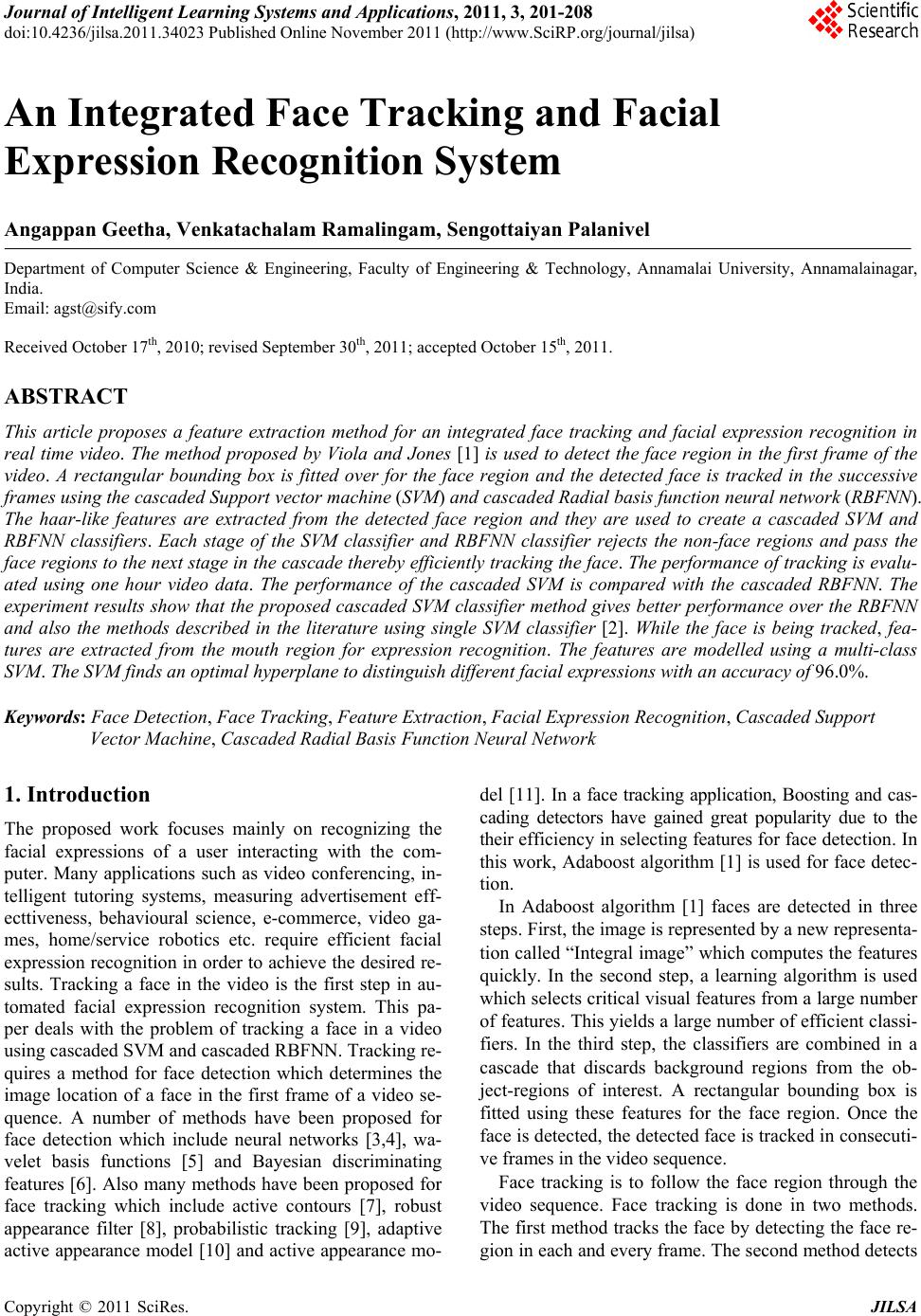
 Journal of Intelligent Learning Systems and Applications, 2011, 3, 201-208 doi:10.4236/jilsa.2011.34023 Published Online November 2011 (http://www.SciRP.org/journal/jilsa) Copyright © 2011 SciRes. JILSA 201 An Integrated Face Tracking and Facial Expression Recognition System Angappan Geetha, Venkatachalam Ramalingam, Sengottaiyan Palanivel Department of Computer Science & Engineering, Faculty of Engineering & Technology, Annamalai University, Annamalainagar, India. Email: agst@sify.com Received October 17th, 2010; revised September 30th, 2011; accepted October 15th, 2011. ABSTRACT This article proposes a feature extraction method for an integrated face tracking and facial expression recognition in real time video. The method proposed by Viola and Jones [1] is used to detect the face region in the first frame of the video. A rectangular bounding box is fitted over for the face region and the detected face is tracked in the successive frames using the cascaded Support vector machine (SVM) and cascaded Radial basis function neural network (RBFNN). The haar-like features are extracted from the detected face region and they are used to create a cascaded SVM and RBFNN classifiers. Each stage of the SVM classifier and RBFNN classifier rejects the non-face regions and pass the face regions to the next stage in the cascade thereby efficiently tracking the face. The performance of tracking is evalu- ated using one hour video data. The performance of the cascaded SVM is compared with the cascaded RBFNN. The experiment results show that the proposed cascaded SVM classifier method gives better performance over the RBFNN and also the methods described in the literature using single SVM classifier [2]. While the face is being tracked, fea- tures are extracted from the mouth region for expression recognition. The features are modelled using a multi-class SVM. The SVM finds an optimal hyperplane to distinguish different facial expressions with an accuracy of 96.0%. Keywords: Face Detection, Face Tracking, Feature Extraction, Facial Expression Recognition, Cascaded Support Vector Machine, Cascaded Radial Basis Function Neural Network 1. Introduction The proposed work focuses mainly on recognizing the facial expressions of a user interacting with the com- puter. Many applications such as video conferencing, in- telligent tutoring systems, measuring advertisement eff- ecttiveness, behavioural science, e-commerce, video ga- mes, home/service robotics etc. require efficient facial expression recognition in order to achieve the desired re- sults. Tracking a face in the video is the first step in au- tomated facial expression recognition system. This pa- per deals with the problem of tracking a face in a video using cascaded SVM and cascaded RBFNN. Tracking re- quires a method for face detection which determines the image location of a face in the first frame of a video se- quence. A number of methods have been proposed for face detection which include neural networks [3,4], wa- velet basis functions [5] and Bayesian discriminating features [6]. Also many methods have been proposed for face tracking which include active contours [7], robust appearance filter [8], probabilistic tracking [9], adaptive active appearance model [10] and active appearance mo- del [11]. In a face tracking application, Boosting and cas- cading detectors have gained great popularity due to the their efficiency in selecting features for face detection. In this work, Adaboost algorithm [1] is used for face detec- tion. In Adaboost algorithm [1] faces are detected in three steps. First, the image is represented by a new representa- tion called “Integral image” which computes the features quickly. In the second step, a learning algorithm is used which selects critical visual features from a large number of features. This yields a large number of efficient classi- fiers. In the third step, the classifiers are combined in a cascade that discards background regions from the ob- ject-regions of interest. A rectangular bounding box is fitted using these features for the face region. Once the face is detected, the detected face is tracked in consecuti- ve frames in the video sequence. Face tracking is to follow the face region through the video sequence. Face tracking is done in two methods. The first method tracks the face by detecting the face re- gion in each and every frame. The second method detects  An Integrated Face Tracking and Facial Expression Recognition System 202 the face region in the first frame and the detected face region is tracked in the consecutive frames by classifying the face region from non face regions. Many models have been proposed for classification. Support vector machines (SVM) and Radial basis function neural network (RBFNN) models are popular due to their good capacity of generalization and possibility to build non-linear classifiers. In this work, a method is proposed using haar-like fea- tures for feature selection and a cascade of SVMs and a cascade of RBFNNs for classification. The detected face and non face regions are modelled using cascaded SVMs and cascaded RBFNNs. The trained models are used to track the face region in the video sequence. While the face is being tracked the mouth region is al- so tracked. Since the mouth plays an eminent role in ex- pressing emotions, the mouth features are used for classi- fying expressions. Many methods have been proposed in the literature which include Active appearance model [12], Adoboost classifier [1,13], hidden markov models [14], neural networks [15], Bayesian networks [16,17], fuzzy systems [18], Support vector machines [19-21]. In this work a multi-class SVM is used for modelling mouth features and to classify the facial expressions. Section 2 explains the face detection process. Facial feature extraction and face and non face modelling using cascaded SVM and cascaded RBFNN are presented in Section 3. Section 4 describes the modelling of mouth re- gion for expression classification. Experimental results are given in Section 5. Section 6 concludes the paper. 2. Face Detection Detecting faces automatically from the intensity or col- our image is an essential task for many applications like person authentication and video indexing. Face detection is done in three steps. In step 1 simple rectangle features as shown in Figure 1 are used. These features are reminiscent of Haar basis functions [19]. The rectangle features are computed quickly using an intermediate representation by the sum of the pixels above and to the left of x, y inclusive: '' xxyy ii xyi xy (1) where ii(x, y) is the integral image and i(x', y') is the original image. The following pair of recurrences can be used to compute the integral image in one pass over the original image. 1 xys xyi xy (2) Figure 1. Rectangle features. 1iix yiixysx y (3) where s(x, y) is the cumulative row sum, s(x, –1) = 0, and ii(–1, y) = 0. The set of rectangle features used provide rich image representation which supports effective lear- ning. In the second step, Adaboost learning algorithm is used to select a small set of features to train the classifier. About 180,000 rectangle features are associated with ea- ch image sub-window. Out of these large numbers of fea- tures, a very small number of features are combined to form an effective classifier. In the third step, a cascade of classifiers as shown in Figure 2 is constructed which increases the detection performance thereby reducing the computation time. A positive result from the first classifier triggers the evaluation of the second classifier and a positive result from the second classifier triggers the third classifier and so on. A negative result from any stage is rejected. The stages in the cascade are constructed using Adaboost al- gorithm and the threshold is adjusted to minimize the fal- se negatives. Stages are added until the target for false positive and detection rate is achieved. A rectangle boun- ding box is placed over the face region. The detected face region is shown in Figure 3. 3. Modelling of Face and Nonface Regions for Face Tracking 3.1. Facial Feature Extraction One of the main issues in constructing a face tracker is to extract the facial features that are invariant to the size of the face. The three types of haar-like features shown in Figure 4 are used to extract the facial features. The haar-like features are calculated as the sum of gray values in the black area subtracted from the sum of Figure 2. Detection cascade. Figure 3. Detected face region. Copyright © 2011 SciRes. JILSA 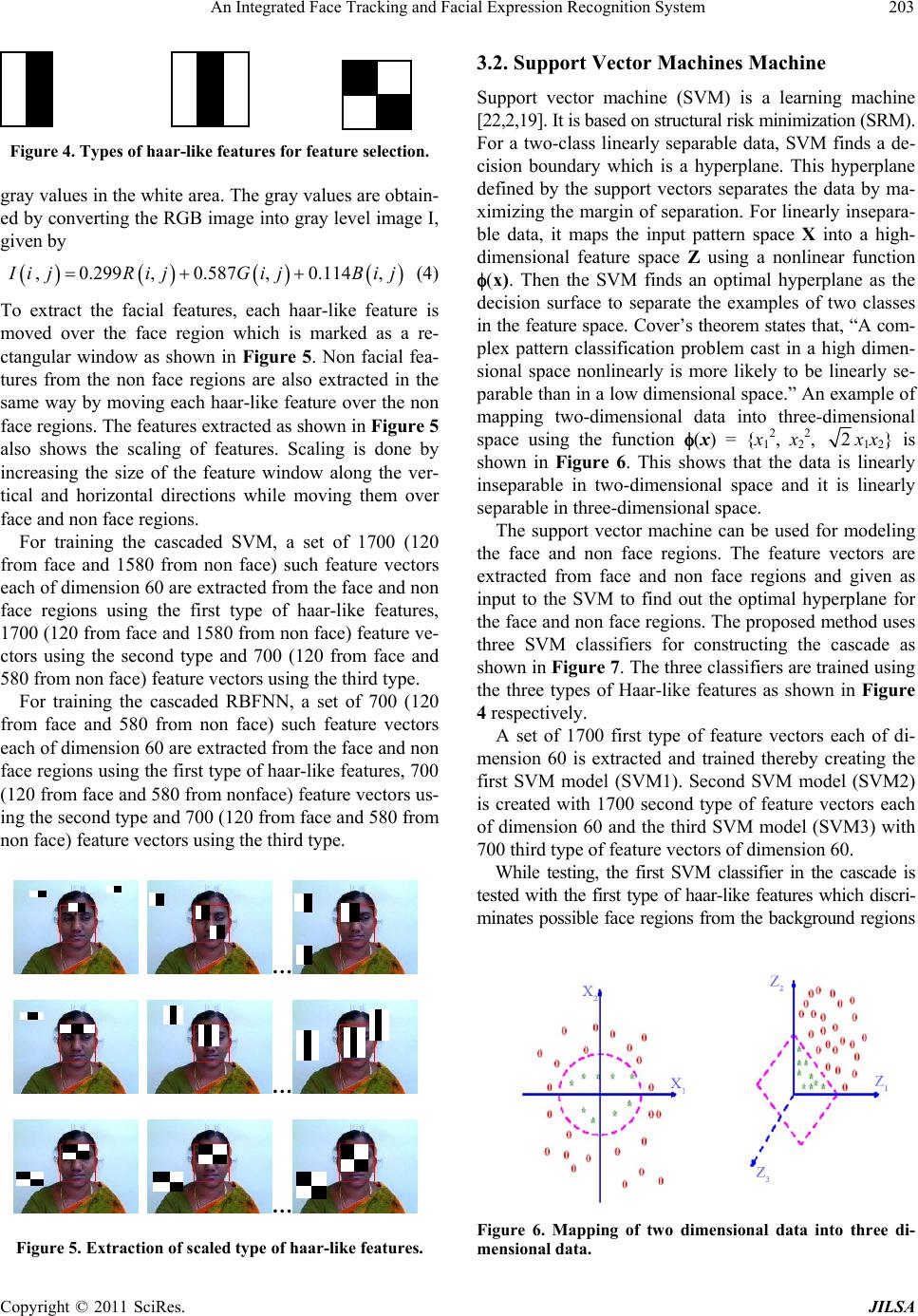 An Integrated Face Tracking and Facial Expression Recognition System203 Figure 4. Types of haar-like features for feature selection. gray values in the white area. The gray values are obtain- ed by converting the RGB image into gray level image I, given by 0.299 0.587 0.114 ijRij GijBij (4) To extract the facial features, each haar-like feature is moved over the face region which is marked as a re- ctangular window as shown in Figure 5. Non facial fea- tures from the non face regions are also extracted in the same way by moving each haar-like feature over the non face regions. The features extracted as shown in Figure 5 also shows the scaling of features. Scaling is done by increasing the size of the feature window along the ver- tical and horizontal directions while moving them over face and non face regions. For training the cascaded SVM, a set of 1700 (120 from face and 1580 from non face) such feature vectors each of dimension 60 are extracted from the face and non face regions using the first type of haar-like features, 1700 (120 from face and 1580 from non face) feature ve- ctors using the second type and 700 (120 from face and 580 from non face) feature vectors using the third type. For training the cascaded RBFNN, a set of 700 (120 from face and 580 from non face) such feature vectors each of dimension 60 are extracted from the face and non face regions using the first type of haar-like features, 700 (120 from face and 580 from nonface) feature vectors us- ing the second type and 700 (120 from face and 580 from non face) feature vectors using the third type. Figure 5. Extraction of scaled type of haar-like features. 3.2. Support Vector Machines Machine Support vector machine (SVM) is a learning machine [22,2,19]. It is based on structural risk minimization (SRM). For a two-class linearly separable data, SVM finds a de- cision boundary which is a hyperplane. This hyperplane defined by the support vectors separates the data by ma- ximizing the margin of separation. For linearly insepara- ble data, it maps the input pattern space X into a high- dimensional feature space Z using a nonlinear function (x). Then the SVM finds an optimal hyperplane as the decision surface to separate the examples of two classes in the feature space. Cover’s theorem states that, “A com- plex pattern classification problem cast in a high dimen- sional space nonlinearly is more likely to be linearly se- parable than in a low dimensional space.” An example of mapping two-dimensional data into three-dimensional space using the function (x) = {x1 2, x2 2, 2x1x2} is shown in Figure 6. This shows that the data is linearly inseparable in two-dimensional space and it is linearly separable in three-dimensional space. The support vector machine can be used for modeling the face and non face regions. The feature vectors are extracted from face and non face regions and given as input to the SVM to find out the optimal hyperplane for the face and non face regions. The proposed method uses three SVM classifiers for constructing the cascade as shown in Figure 7. The three classifiers are trained using the three types of Haar-like features as shown in Figure 4 respectively. A set of 1700 first type of feature vectors each of di- mension 60 is extracted and trained thereby creating the first SVM model (SVM1). Second SVM model (SVM2) is created with 1700 second type of feature vectors each of dimension 60 and the third SVM model (SVM3) with 700 third type of feature vectors of dimension 60. While testing, the first SVM classifier in the cascade is tested with the first type of haar-like features which discri- minates possible face regions from the background regions … Figure 6. Mapping of two dimensional data into three di- mensional data. … … Copyright © 2011 SciRes. JILSA  An Integrated Face Tracking and Facial Expression Recognition System 204 Figure 7. Cascaded SVM. and passes them to the second classifier. The second clas- sifier is tested with the second type which in turn discri- minates most possible regions and passes them to the third one. Finally, the third classifier tested with the third type, detects the exact face region in the image. Since the cascade of classifiers rejects the non face regions in each stage so that the face region is efficiently detected at the final stage, the proposed method performs better than the single SVM classifier. 3.3. Radial Basis Function Neural Networks Radial basis function neural network is a variant of Arti- ficial Neural Network (ANN). It has a feedforward archi- cture [23-25] with an input layer, a hidden layer, and an output layer. It is applied to the problems of supervised learning and associated with radial basis functions. RBF- NN trains faster than multilayer perceptron. It can be ap- plied to the fields such as control engineering, time-series prediction, electronic device parameter modelling, spee- ch recognition, image restoration, motion estimation, da- ta fusion etc. The architecture of RBFNN is shown in Figure 8. Radial basis functions are embedded into a two-layer feed forward neural network. Such a network is characterized by a set of inputs and a set of outputs. In between the inputs and outputs there is a layer of proc- essing units called hidden units. Each of them imple- ments a radial basis function. The input layer of this net- work has ni units for a ni dimensional input vector. The input units are fully connected to the nh hidden layer units, which are in turn fully connected to the nc output layer Figure 8. Structure of Radial basis function neural network. ere cho- se units, where nc is the number of output classes. SVM1 SVM 2 SVM 3 All sub- windows (Face & Nonface) Detected Face Window The activation functions of the hidden layer w n to be Gaussians, and are characterized by their mean vectors (centers) μi, and covariance matrices Ci, i = 1, 2, ···, nh. For simplicity, it is assumed that the covariance matrices are of the form Ci = σi 2I, i = 1, 2, ···, nh. Then the activation function of the ith hidden unit for an input vec- tor xj is given by Reject sub-windows (Nonface) 2 exp 2 iji ji gx x (5) The μ and σ2 are calculated by using suitable cluster- in les to k means (clus- te samples according to nearest μk. 2 and 3 until no change in μk. and th i i g algorithm. Here the k-means clustering algorithm is employed to determine the centers. The algorithm is composed of the following steps: 1) Randomly initialize the samp rs), μ1, ···, μk. 2) Classify n 3) Recompute μk. 4) Repeat the steps A number of activation functions in the network eir spread influence the smoothness of the mapping. The assumption σi 2 = σ2 is made and σ2 is given in (6) to ensure that the activation functions are not too peaked or too flat. 22 2d (6) In the above equation d is the m tw aximum distance be- een the chosen centers, and η is an empirical scale factor which serves to control the smoothness of the mapping function. Therefore, The Equation (5) is written as 2 exp iji j xxd (7) The hidden layer units are fully connected to the nc ou (8) where g0(x) = 1. Given n feature vectors from nc classes, ally, the un- su tput layer units through weights wik. The output units are linear, and the response of the kth output unit for an input xj is given by 0 , 1,2,.... h i kj ikijc n yxwgx kn j t training the RBFNN involves estimating μi, i = 1, 2, ···, nh, η, d2, and wik, i = 0, 1, 2, ···, nh, k = 1, 2, ···, nc. The pro- cedure for training RBFNN is given below: Determination of μi and d2: Convention X1 Y1 X2 Y2 pervised k-means clustering algorithm, can be applied to find nh clusters from nt training vectors. However, the training vectors of a class may not fall into a single clus- ter. In order to obtain clusters only according to class, the k-means clustering may be used in a supervised manner. Training feature vectors belonging to the same class are clustered to nh/nc clusters using the k-means clustering X3 Output layer Input layer Hidden layer Copyright © 2011 SciRes. JILSA  An Integrated Face Tracking and Facial Expression Recognition System205 hidden an (9) where Y is a n × nc matrix w 10) To solve W from (8), G is completely specified by cl algorithm. This is repeated for each class yielding nh cluster for nc classes.These cluster means are used as the centers μi of the Gaussian activation functions in the RBFNN. The parameter d was then computed by finding the maximum distance between nh cluster means. Determining the weights wik between the d output layer: Given that the Gaussian function cen- ters and widths are computed from nt training vectors, (7) may be written in matrix form as YGW tj i a nt × (nh + 1) matrix with elements Gij = gj(xi), and W is a (nh+1) × nc matrix of unknown weights. W is obtained from the standard least squares solution as given by TT WGGGY ( ith elements Yij = y(x), G is the ustering results, and the elements of Y are specified as if class otherwise i ij j Y (11) The Radial basis function neural networks can be used fo × 60 (120 × 60 from face region and 580 × BFNN1) in r modelling the face and non face regions. The feature vectors are extracted from face and non face regions and given as input to the RBFNN to find out the face and non face regions. The proposed method uses three RBFNN classifiers for constructing the cascade as shown in Fig- ure 9. The three classifiers are trained using the three different types of Haar-like features as shown in Figure 4 respectively. A set of 700 60 from non-face region) first type of feature vectors is extracted and trained thereby creating the first RBFNN model (RBFNN1). Second RBFNN model (RBFNN2) is created with 700 × 60 (120 × 60 from face region and 580 × 60 from non-face region) second type of feature vectors. Third RBFNN model (RBFNN3) is created with 700 × 60 (120 × 60 from face region and 580 × 60 from non-face region) second type of feature vectors. While testing, the first RBFNN classifier (R the cascade is tested with the first type of haar-like Detected Face RBFNN1 RBFNN2 RBFNN 3 All sub-windows Reject sub-wi ndows (Nonface) Detected Face Window All sub-windows (Face & Nonface ) Figure 9. Cascaded RBFNN. features which regions from ize 10 × gion for Expression Th a face plays an efficient role in cla- f 100 × 16 feature vectors from 100 frames in th discriminates possible face the background regions and passes them to the second classifier. The second classifier (RBFNN2) is tested with the second type which in turn discriminates most possi- ble regions and passes them to the third one. Finally, the third classifier (RBFNN3) which is tested with the third type, detects the exact face region in the image. Since the cascade of classifiers rejects the non face regions in each stage so that the face region is efficiently detected at the final stage, the proposed method with cascaded RBFNN performs better than the single RBFNN classifier. The hidden layer nodes are assigned weights of s 2 where 10 clusters (2 clusters for face and 8 clusters for non face) are formed. In this work, the output layer consists of 2 nodes where the patterns are classified as belonging to face or non face. 4. Modelling of Mouth Re Classification e mouth region in ssifying the basic facial expressions. The basic facial ex- pressions are shown in Figure 10. To extract the features from the mouth region, it is first located in the face re- gion. Mouth location is determined relative to the coor- dinates of the face detection window. This is shown in Figure 11. Once the mouth is located, it is divided into sixteen regions. The average of the gray values in each of the sixteen regions is extracted to model the facial expre- ssions. A set o e video are extracted for each of the expressions sepa- rately. In this proposed work, four facial expressions such as normal, smile, anger and fear are considered and hence a total of 400 × 16 feature vectors are extracted Figure 10. Different facial expressions . Figure 11. Location of mouth region. Copyright © 2011 SciRes. JILSA  An Integrated Face Tracking and Facial Expression Recognition System 206 from the fracked. A to be tracked are cap- acial region while the face is being t multiclass SVM is used to model these features. It is trained initially with 400 × 16 feature vectors. While tes- ting, the mouth region is tracked in a video and the fea- tures are extracted and given as input to the multiclass SVM models for classification. 5. Experimental Results The images from which faces are tured at the rate of 10 frames/sec using Logitech Quick- cam Pro5000 web camera in a PC with 2.00 GHz Intel Core 2 Duo processor. The performance is evaluated by tracking the face in a video of one hour duration using SVM and RBFNN. Once the face is detected in the first frame, it is tracked in consecutive frames. The tracked face region in consecutive frames is shown by means of drawing a rectangle over the face region as shown in Figures 12 and 13. While tracking the face region, the mouth region is also tracked to classify the facial expres- sions. Figure 12. Face tracking using polynomial kerne l . Figure 13. Face tracking using RBFNN. Table ace trac- ki 1 shows the performance of proposed f ng method wusing the measures, Precision and Recall. The terms Precision and Recall are defined as No..of True Positives Precision o..of True Positives + False Positives (12) No..of True Positives Recall = o..of True Positives + False Negatives (13) The percentage of Precision and Recall are measured w hows the performance of the proposed me- th Table 1. Face tracking performance using cascaded SVM Models Precision Recall ith different SVM kernel functions and RBFNN. It is understood that the SVM with polynomial kernel per- forms better than the Linear kernel, Radial basis function kernel and RBFNN. While the face is being tracked, mouth features are extracted from about 100 frames for each of the four expressions separately. Hence a total of 400 × 16 feature vectors are trained using a multiclass SVM. While testing, the SVM is tested for 400 frames (100 consecutive frames for each of the four expressions separately). Table 2 s od in recognizing facial expressions. Table 3 shows the confusion matrix for the test examples. The accuracy rates of facial expression recognition measured with dif- ferent number of consecutive frames is shown in Figure 14. From the Table 2, it is observed that the Fear expre- ssion is recognized well than the other expressions. and cascaded RBFNN. SVM w kernel ith Linear72.0% 80.5% SV SVM nel M with Polynomial kernel 91.4% 95.0% with Radial basis function ker85.0% 99.0% RBFNN 89.5% 87.6% able 2. Recognition accuracy of facial expression recogni- Facial Expression Recognition accuracy T tion. Smile 90.0% Fear 96.0% Anger 82.0% Normal 72.0% able 3. Confusion matrix for the test examples. Expression Smile Fear Anger Normal T Smile 90 5 0 5 Fear 0 96 0 4 Anger 8 7 82 3 Normal 13 5 10 72 Copyright © 2011 SciRes. JILSA  An Integrated Face Tracking and Facial Expression Recognition System207 Figure 14. Accuracy rates for facial expression recognition The confusion matrix given in Table 3 shows that out of acking and fa- ci also compared with a m st xpressions, the proposed sys- te number of expressions. s, “Rapid Object Detection Using a Boosted Casc,” Proceedings of IEEE Computn Computer Vision Vol. 20, No.1, 1998, Int using multi-class SVM. 100 frames with fear expressions, 96 frames have been correctly classified and 4 frames have been misclassified. 6. Conclusions and Future Work This paper proposes a method for face tr al expression recognition using cascaded SVM and cascaded RBFNN classifiers. A face is detected in the first frame of the video using face detection process pro- posed in [12]. The face is then tracked in consecutive frames by classifying the face and non face regions using the cascaded SVM and cascaded RBFNN. Since the non face regions are rejected in each stage, the face region is effectively tracked in the final stage even under varying illumination, scale and pose. The RBFNN classifier is trained with the maximum of 700 feature vectors where- as SVM is trained with the maximum of 1700 feature vectors. It is the drawback of RBFNN that its perform- ance gets reduced with large number of data. Hence it is found that the system tracks the face with greater perfor- mance using SVM polynomial kernel than the RBFNN. The system using a cascaded SVM is found to be better with the precision performance of 91.4% than the system using a single SVM classifier [2] in the literature with the maximum Precision performance of 72.8% using the same polynomial kernel. The proposed method isulti- age face tracker [26] where ratio template algorithm had been used. The ratio template algorithm was modifi- ed with the inclusion of better spatial template for facial features. This hybrid face tracker was able to locate only 89% of images in the sequence which performs lower than the proposed method. Among the four facial e m is able to recognize the fear expression with the high- est accuracy of 96.0%. The system can be extended to track multiple faces in the video sequence with more REFERENCES [1] P. Viola and M. Jone ade of Simple Features er So Ciety Conference o and Pat Tern Recognition, Kauai, 8-14 December 2001, Vol. 1, p. 511. [2] L. Carminati, J. Benois-Pineau and C. Jennewein, “Know- ledge-Based Super Vised Learning Methods in a Classical Problem of Video Object Tracking,” Proceedings of IEEE ernational Conference on Image Processing, Atlanta, 8-11 October 2006, pp. 2385-2389. [3] H. A. Rowley, S. Baluj and T. Kanade, “Neural Network- Based Face Detection,” IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 23-38. doi:10.1109/34.655647 [4] R. Feraud, O. J. Bernier, J. Vialle and M. Collobert, “A Fast and Accurate Face Detector Based on Neural Net- works,” IEEE Transactions on Pat Tern Analysis and Machine Intelligence, Vol. 23, No. 1, 2001, pp. 42-53. doi:10.1109/34.899945 [5] C. Papageorgiou, M. Oren and T. Poggio, “A General Famework for Object Detection,” Proceedings of Inter national Conference on Computer Vision, Bombay, 4-7 - ol. 25, No. 6, 2003, pp. 725- January 1998, pp. 555-562. [6] C. Liu, “A Bayesian Discriminating Features Method for Face Detection,” IEEE Transactions on Pattern Analysis and Machine Intelligence, V 740. doi:10.1109/TPAMI.2003.1201822 [7] D. Freedman, “Active Contours for Tracking Distributions,” IEEE Transactions on Image Processing, Vol. 13, No. 4, 2004, pp. 518-526. doi:10.1109/TIP.2003.821445 Intelli- ition, Wash- [8] H. T. Nguyen and A. W. M. Smeulders, “Fast Occluded Object Tracking by a Robust Appearance Filter,” IEEE Transactions on Pattern Analysis and Machine gence, Vol. 26, No. 8, 2004, pp. 1099-1104. [9] H.-T. Chen, T.-L. Liu and C.-S. Fuh, “Probabilistic Trac- king with Adaptive Feature Selection,” Proceedings of International Conference on Pattern Recogn ington DC, Vol. 2, 2004, pp. 736-739. doi:10.1109/TPAMI.2004.45 [10] A. U. Batur and M. H. Hayes, “Adaptive Active Appear- ance Models,” IEEE Transactions on Im Vol. 14, No. 11, 2005, pp. 170 age Processing, 7-1721. doi:10.1109/TIP.2005.854473 [11] P. Corcoran, M. C. Ionita and I. Bacivarov, “Next Gen- eration Face Tracking Technology Usin ques,” Proceedings of Interna g AAM Techni- tional Symposium on Sig- nals, Systems and Circuits, Vol. 1, 2007, pp. 1-4. doi:10.1109/ISSCS.2007.4292639 [12] K.-S. Cho, Y.-G. Kim and Y.-B. Lee, “Real-Time Ex- pression Recognition System Using Active Appe Model and EFM,” Proceedings of arance International Confer- pression Recognition,” Proceedings of IEEE Conference ence on Computational Intelligence and Security, Guang- zhou, Vol. 1, November 2006, pp. 747-750. [13] P. Yang, Q.-S. Liu and D. N. Metaxas, “Boosting Coded Dynamic Features for Facial Action Units and Facial Ex- Copyright © 2011 SciRes. JILSA  An Integrated Face Tracking and Facial Expression Recognition System Copyright © 2011 SciRes. JILSA 208 ing, Minnea- nsics and Security, Vol. 1, 2006 on Computer Vision and Image Understand polis, 18-23 June 2007. [14] S Petar, S. Aleksic and A. K. Katsaggelos, “Automatic Facial Expression Recognition Using facial Animation Parameters and Multi-Stream HMMs,” IEEE Transac- tions on Information Fore, pp. 3-11. doi:10.1109/TIFS.2005.863510 [15] L. Ma and K. Khorasani, “Facial Expression Recognition Using Constructive Feed forward Neural Networks,” IEEE Transactions on Systems, Man and Cybernetics, Vol. 34, No. 3, 2004, pp. 1588-1595. doi:10.1109/TSMCB.2004.825930 [16] N. Friedman, D. Geiger and M. Goldszmidt, “Bayesian Network Classifiers,” Machine Learning, Vol. 29, No. 2, 1997, pp. 131-163. doi:10.1023/A:1007465528199 and T. Huang, “Emo- p. 17- erence, London, 2007. 2009, pp. 303-308. [17] N. Sebe, I. Cohen, A. Garg, M. Lew tion Recognition Using a Cauchy Naïve Bayes Classi- fier,” Proceedings of International Conference on Pattern Recognition, Quebec City, Vol. 1, August 2002, p 20. [18] N. Esau, E. Wetzel, L. Kleinjohann and B. Kleinjohann, “Real-Time Facial Expression Recognition Using a Fuzzy Emotion Model,” IEEE Proceedings of Fuzzy Systems Conf [19] A. Geetha, V. Ramalingam, S. Palanivel and B. Palani- appan, “Facial Expression Recognition—A Real Time Approach,” International Journal of Expert Systems with Applications, Vol. 36, No. 1, doi:10.1016/j.eswa.2007.09.002 [20] I. Kotsia, N. Nikolaidis and I. Pitas, “Facial Expres Recognition in Videos Using a sion Novel Multi-Class Sup- , Vol. Data Mining and Know- ace port Vector Machines Variant,” Proceedings of Interna- tional Conference on Acoustics, Speech and Signal Proc- essing, Honolulu, 15-20 April 2007, pp. 585-588. [21] S. Avidan, “Support Vector Tracking,” IEEE Transac- tions on Pattern Analysis and Machine Intelligence 26, No. 8, 2004, pp. 1064-1072. [22] J. C. B. Christopher, “A Tutorial on Support Vector Ma- chines for Pattern Recognition,” ledge Discovery, Vol. 2, No. 2, 1998, pp. 121-167. [23] F. Yang and M. Paindavoine, “Implementation of an RBF Neural Network on Embedded Systems: Real-Time F Tracking and Identity Verification,” IEEE Transactions on Neural Networks, Vol. 14, No. 5, 2003, pp. 1162-1175. doi:10.1109/TNN.2003.816035 [24] S. Haykins, “Neural Networks: A Comprehensive Foun- dation,” Pearson Publication 2001, Asia. Basis Function nments,” Computer Vision [25] M. T. Musavi, W. Ahmed, K. H. Chan, K. B. Faris and D. M. Hummels, “On the Training of Radial Classifiers,” IEEE Transactions on Neural Networks, Vol. 5, No. 4, 1992, pp. 595-603. [26] K. Anderson and P. W. McOwan, “Robust Real-Time Face Tracker for Cluttered Enviro and Image Understanding, Vol. 95, No. 2, 2004, pp. 184- 200. doi:10.1016/j.cviu.2004.01.001
|