Least Squares Matrix Algorithm for State-Space Modelling of Dynamic Systems
290
sample number
sample number
millivolt smillivolt s
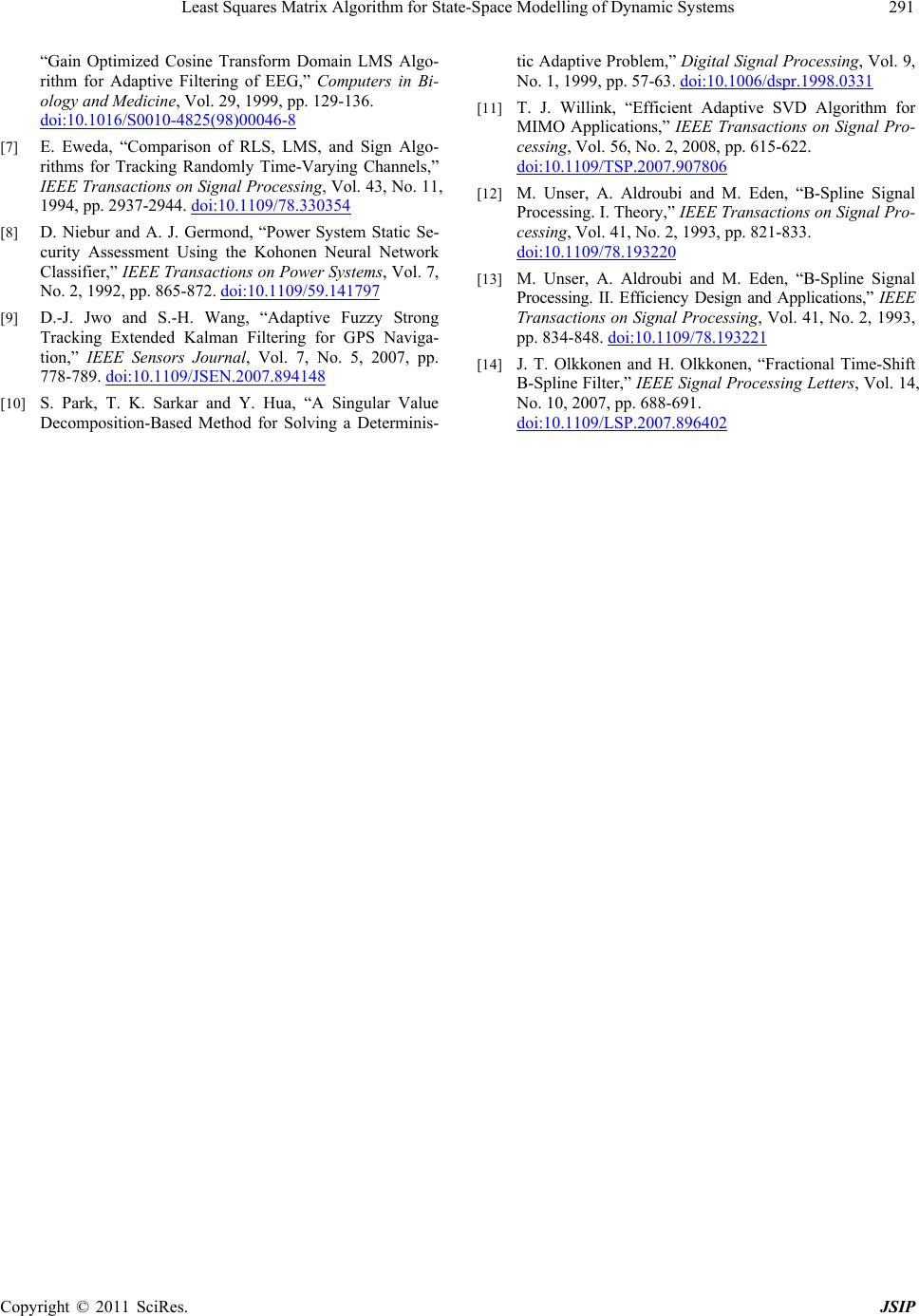
Figure 2. The original neuroelectric signal (top) and the
outcome of the LMS algorithm (below). The x-axes denote
the sample number. The y-axes denote the signal voltage in
millivolts.
5. Conclusions
In this work we describe the least squares matrix (LSM)
algorithm for the estimation of the dynamic state-space
models. In conventional recursive least squares (RLS)
algorithms uptake is based on the use of the forgetting
factor, which weights the data vectors by an exponent-
tially descending function. In the present algorithm the
rectangular weighting function is used, where the Hankel
data matrix includes M vectors (4). The uptake of the
data matrix consists of the addition of the most recent
data vector 1n and subtraction of the latest vector
1. This leads to a novel uptake mechanism (7) via
and n matrices, which are dimensioned as
and
Y
nM
Y
n
U
n
U
V
2N2
n
V
V. Due to the reduced dimen-
sions of the n
U and n matrices, the computations
needed in the uptake have computational complexity,
which is of the same order than in the conventional RLS
algorithm, which is usually referred as.
2
ON
The RLS algorithm is known to be only marginally
stable in the analysis of the fastly time varying systems.
In the present algorithm the estimation of the state transi-
tion matrix is based on the LS solution of the Hankel
structured data matrix, which consists of M data vectors.
The method is inherently robust, since any adaptive fil-
tering criteria are not used. The computation time does
not depend on the number of data vectors M. The length
of the data vectors N matches the system order. For noise
free measurements M may be only slightly higher than N.
In analysis of systems corrupted with noise the increase
of M makes the algorithm more noise tolerant. On the
other hand the overdeterministic solution masks the rapid
changes in system parameters.
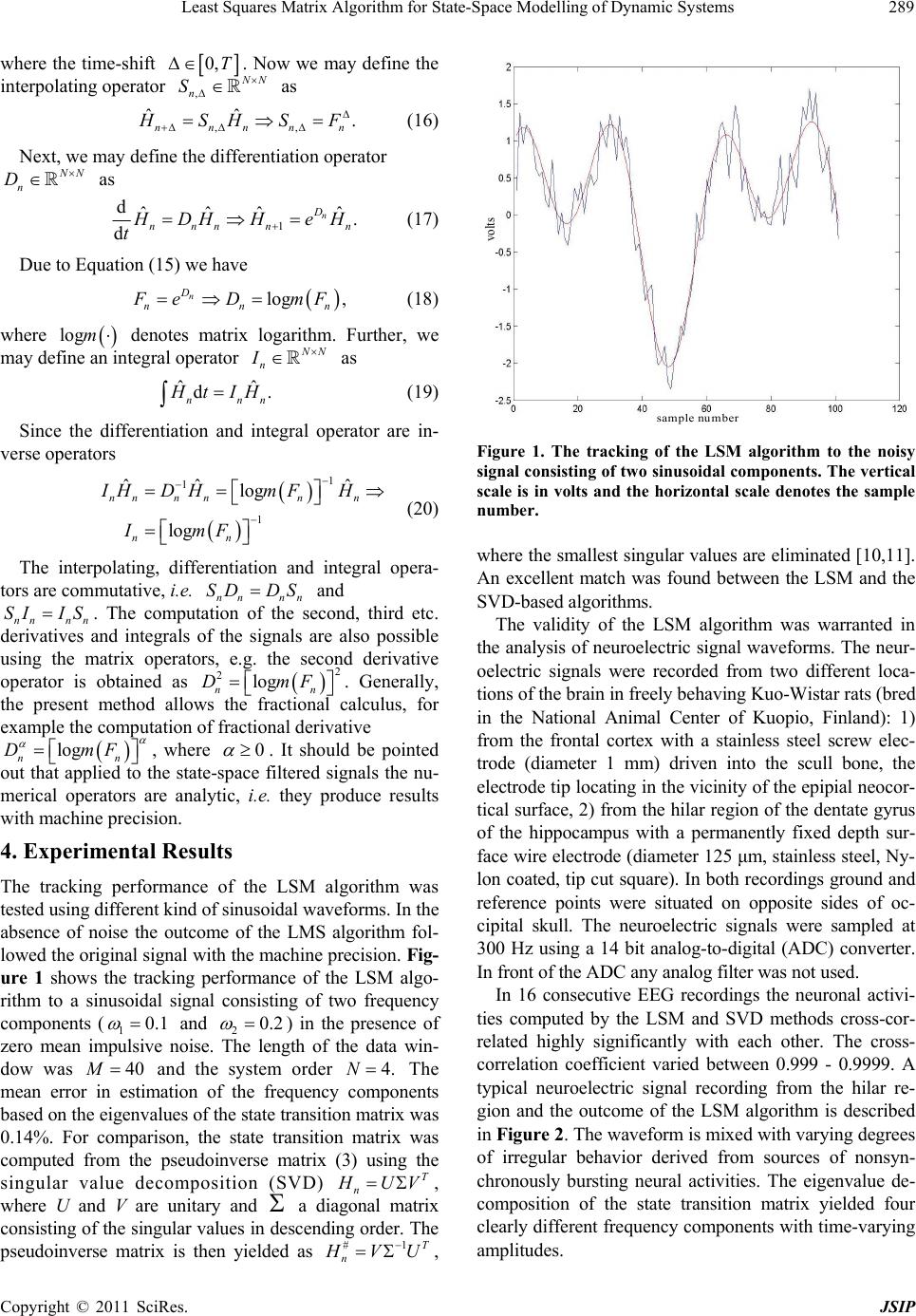
The good tracking performance of the LSM algorithm
was warranted in the state-space modelling of the sinu-
soidal signals (Figure 1) and the neuroelectric signal
waveforms (Figure 2). The outcome of the LSM alg-
orithm correlated well with the results yielded by SVD
method. The small differences are probably due to the
fact that in the SVD method the smallest singular values
must be eliminated before the computation of the pseu-
doinverse matrix. This reduces the system order in the
SVD method. In the LSM algorithm the system order can
be higher and the state-space modelling is more tolerant
to variations in system parameters. The distinct differ-
ence between the present algorithm and the SVD based
methods is that the present algorithm updates the state
transition matrix n
at every time interval, while the
SVD based algorithms [10,11] compute the state transi-
tion matrix in data blocks. Our algorithm is more feasible
in the analysis of the fastly changing dynamic systems
and especially for real-time applications, where the ei-
genvalues of the state transition matrix give actual in-
formation on the system functioning.
The knowledge of the state transition matrix yields a
plenty of numerical signal processing tools, such as in-
terpolation (16), differentiation (18) and integration op-
erators (20), which compete for example with the conven-
tional B-spline signal processing algorithms [12-14].
6. Acknowledgements
We are indebted to the anonymous reviewer, whose com-
ments improved the manuscript significantly.
REFERENCES
[1] F. Daum, “Nonlinear Filters: Beyond the Kalman Filter,”
IEEE A&E Systems Magazine, Vol. 20, No. 8, 2005, pp.
57-69.
[2] A. Moghaddamjoo and R. L. Kirlin, “Robust Adaptive
Kalman Filtering with Unknown Inputs,” IEEE Transac-
tions on Acoustics, Speech and Signal Processing, Vol.
37, No. 8, 1989, pp. 1166-1175. doi:10.1109/29.31265
[3] J. L. Maryak, J. C. Spall and B. D. Heydon, “Use of the
Kalman Filter for Interference in State-Space Models
with Unknown Noise Distributions,” IEEE Transactions
on Automatic Control, Vol. 49, No. 1, 2005, pp. 87-90.
[4] R. Diversi, R. Guidorzi and U. Soverini, “Kalman Filter-
ing in Extended Noise Environments,” IEEE Transac-
tions on Automatic Control, Vol. 50, No. 9, 2005, pp.
1396-1402. doi:10.1109/TAC.2005.854627
[5] S. Attallah, “The Wavelet Transform-Domain LMS
Adaptive Filter with Partial Subband-Coefficient Updat-
ing,” IEEE Transactions on Circuits and Systems II: Ex-
press Briefs, Vol. 53, No. 1, 2006, pp. 8-12.
doi:10.1109/TCSII.2005.855042
[6] H. Olkkonen, P. Pesola, A. Valjakka and L. Tuomisto,
Copyright © 2011 SciRes. JSIP