 Int. J. Communications, Network and System Sciences, 2011, 4, 727-734 doi:10.4236/ijcns.2011.411089 Published Online November 2011 (http ://www.SciRP.org/journal/ijcns) Copyright © 2011 SciRes. IJCNS Distributed Frequency Assignment Using Hierarchical Cooperative Multi-Agent System* Jamal Elhachmi, Zouhair Guenoun Laborat ory o f Electronics an d Tele communi c at i on s , Mohammadia School of Engineers (EMI), Rabat, Morocco E-mail: Jamal_elhachimi@hotmail.com, zouhair@emi.ac.ma Received June 21, 201 1; revised July 20, 2011; accepted August 11, 2011 Abstract Recent demand for wireless communication continues to grow rapidly as a result of the increasing number of users, the emergence of new user requirements, and the trend to new access technologies. At the same time, the electromagnetic spectrum or frequencies allocated for this purpose are still limited. This makes solving the frequency assignment problem more and more critical. In this paper, a new approach is proposed using self-organizing multi-agent systems to solve distributed dynamic channel-assignment; it concerns distribu- tion among agents which task is to assign personal station to frequencies with respect to well known con- straints. Agents only know their variables and the constraints affecting them, and have to negotiate to find a collective solution. The approach is based on a macro-level management taking the form of a hierarchical group of distributed agents in the network and handling all RANs (Regional Radio Access Network) in a lo- calized region regardless of the operating band. The approach defines cooperative self-organization as the process leading the collective to the solution: agents can change the organization by their own decision to improve the state of the system. Our approach has been tested on PHEADEPHIA benchmarks of frequency assignment Problem. The results obtained are equivalent to those of current existing methods with the bene- fits that our approach shows more efficiency in terms of flexibility and autonomy. Keywords: Dynamic Frequency Assignment, Optimization Problem, Multi-Agent System, Artificial Intelligence 1. Introduction With growth in the demand of mobile telephone services, the efficient use of available spectrum is becoming in- creasingly important. The studies of a frequency assign- ment problem (also called a channe l assignment problem) in cellular mobile systems are so abundant [1-5]. Various Artificial Intelligent (AI) techniques, includin g con straint satisfaction, simulated annealing, neural networks, taboo search, and genetic algorithms, have been applied to this problem [6-12]. An overview of the frequency assignment problem is as follows: For an existing set of, geograp hically d iv ided, regions (called cells—typically hexagonal), frequencies (channels) must be assigned to each cell according to the number of call requests. Three types of electro-magnetic separation constraints exist. Co-channel constraint: the same frequency cannot be assigned to pairs of the cells that are geographically close to each other. Adjacent channel constraint: similar frequencies can- not be simultaneously assigned to adjacent cells. Co-site constraint: any pair of frequencies assigned to the same cell must have a certain separation. The goal is to find a frequency assignment that satis- fies the above constraints using a minimum number of frequencies (more precisely, using the minimum span of the frequencies). It must be noted that there exist several variations of frequency assignment problems. The bench- mark problems provided by the EUCLID-project Com- binatorial Algorithms for Military Applications (CALMA) project are well-known in the constraint satisfaction/ optimization research community. This type of problem arises from a military application, and geographical in- formation including cells is not described in the problem specification. Constraint satisfaction/optimization tech- niques can solve this type of problem quite efficiently. The objectives of this paper are twofold. First, present *Laboratory of Electronics and Telecommunications-Mohammadia School of Engineers, Rab at, Morocco.  J. ELHACHMI ET AL. 728 and formulate the problem of frequency assignment. Second, establish a perspective of resolution based on the application of Hierarchical Multi-Agents System (HMAS) for an intel ligent resources management that al lows insert- ing dynamically the new li nks in the basi n of the net work. Unlike centralized conventional methods our approach provides a distributed management framework, which deals with intelligent behavior which is the product of cooperative activity of several agents to fill the limits of classical Artificial Intelligence (AI) for solving this complex problem. Through a passage of individual be- havior to collective behavior characterized by a distrib- uted control of distributed among entities (agents) gov- erned by simple rules. Instead of representing each call as a variable, we represent a cell as a variable that has a very large domain. Furthermore, we determine the vari- able value step by step instead of determining a variable value at one time. To each cell is associated a coopera- tive agent that handles the assignment of a frequency. Within a Radio Area Network-RAN (Regional Radio Access Network) and at each step, an agent is elected by all its neighbors. The election is based on empirical rules for calculating the degree of separation of an agent, the degree of saturation and the improvement claimed by the neighbors for an assignment. The elected agent assigns the smallest frequency in the spectrum that meets all its constraints. In the case of a non permitted assignment, the agent may be ser ved by a neighboring RAN, through a mechanism of cooperation between supervisor agents of both RANs. If no proposal has been received, the su- pervisor agent can make a Taboo Search for an improve- ment in the overall assignment in the associated RAN. The rest of this paper is organized as follows. In Sec- tion II, we review the research contributions in the area frequency assignment. In Section III, we formulate the frequency assignment problem. In Section IV, we de- scribe our resolution approach to this problem that util- izes hierarchical multi-agent system. Section V is re- served to show experimental evaluations using standard benchmark. Finally, Section VI concludes our work with a comparison to other current research and a projection for future issues. 2. Related Work The current challenges in radio networks are: to ensure an efficient and full use of radio frequency resources and multimedia applications, Connect at best anywhere, any- time and with any network. Customize the more power- ful features stimulated by the increasing consumers’ de- mand. Find solutions for the mobile business. And tend toward several access technologies whose assignment is local and continuously and independently updated, ren- dering impossible any overall control. This lead to a very interesting and pertinent issue for radio spectrum is dy- namic spectrum assignment problem. This problem is one of the most studied problems in the literature, particularly multiple variants algo rithms are proposed for s ol vi ng t hi s p ro bl em [1,5,7,10, 11, 13 -1 6]. The problem starts from some networks initial con- nections (namely robust) to develop progressively the subsequent connections according to the operational change of communication needs and taking into account the constraints of disturbances wit h all initial connections. Constraint satisfaction techniques are a board family of greedy algorithm that guarantees an exhaustive search in the search space of a complete solution. But in some cases it can be impossible or impractical to solve these problems completely and the time and effort required to the search may be prohibitive, and the most straightfor- ward way for solving such problems using constraint satisfaction techniques would be to represent each call as a variable (belonging to the domain of available frequen- cies), then to solve the problem as a generalized graph- coloring problem [7]. However, solving real-life, large- scale problems’ using this simple formulation seems rather difficult without avoiding the symmet ries between calls within one cell [2]. Unlike greedy methods, meta-heuristics seek to find an optimal solution with a good compromise in a rea- sonable time. These techniques are nowadays widely used; such as the following techniques that have become popular: Simulated Annealing (SA), Taboo search (TS), and Genetic Algorithms (GAs). The taboo search technique is based on the intelligent search and embraces more efficient and systematic forms of direction of search. The simulated annealing techniqu e (SA) is a stochastic computational technique used for solving big optimiza- tion problem such as frequency assignment problem, by determining the global minimum value of an objective function with various degrees of freedom subject to the problem in a reasonable amount of time. This technique is more efficient than the Taboo search technique; its advantages are its gen erality and its cap ab ility to move to states of higher energy. On the other hand the Taboo Search (TS) presented her does not support this feature. This is why TS cannot run away from likely local min- ima and normally results inferior configurations [6]. Another way of the problem resolution consists of representing a cell as a variable that has a wide area of values, and tries to determine the value of this variable step by step instead of determining a value for this vari- able at one time. Recently, neural networks have been considered one of these ways for the channel assignment problems. The Copyright © 2011 SciRes. IJCNS  J. ELHACHMI ET AL.729 advantages of the algorithm are its inherent parallelism, its property to detect areas of different problem difficulty without heuristics, and the possibility of extending the algorithm to ‘soft’ interference criteria. One major dis- advantage of a neural network is that it gives the local optimal value rather than the global optimal value. And the solution varies depending on the initial values [17]. Genetic Algorithms (GA) have an advantage over Neural Networks or Simulated Annealing in that genetic algorithms are generally good in finding very quickly an acceptably good global optimal solution to a problem [1]; even if, genetic algorithms do not guarantee to find the global optimum solution to the problem. In this algo- rithm, the cell frequency is not fixed before the assign- ment procedures as in the previously reported channel assignment algorithm using neural networks [17]. But the Genetic algorithms are expensive in computing time, as they handle multiple solutions simultaneous ly. 3. Frequency Assignment Problem Formulation A frequency assignment problem can be formalized as follows: Let be a set of n transceivers (TRXs), 12 ,, , n Ttt t and let 12 ,,, k iii i fff N be the set of valid fre- quencies that can be assigned to a transceiver i tT , (the cardinality of Fi could be different to each TRX). Furthermore, let be a set of given sectors (or cells) of cardinality m. Each transceiver i is installed in exactly one of the m sectors and is denoted as 1, ,in 12 ,,, m SSS S S tT i St . The set of constraints is represented by a m* m matrix called matrix of compatibility: * , ii mm M . The two elements ij and ij of a matrix entry ,, ij ij Mij are numerical values greater than or equal to zero and they represent the mean and standard deviation respectively, of a Gaussian probability distri- bution used to quantify the interferences ratio (C/I) when sector i and j operate on a same frequency. Therefore, the higher the mean value is, the lower interferences are, and thus it will have a superior communicatio n quality. A solution to the problem lies in assigning to all the TRXs (ti) a valid frequency from its domain (Fi), in order to minimize the following cost function: ,,, sig tTuTut CpC ptu (1) where Csig will compute the co-channel interferences (Cco) and the adjacent-channel interferences (Cadj) for all sec- tor t and u, in which the transceiv ers t and u are installed, that is, s(t) and s(u), respectively. 12 n pFF F denotes a solution (or frequency plan) , wher e pt ii F is the frequency assigned to the transceiver ti. Moreover, tu s and tu s are the inter- ference matrix values at the entry M(st, su) for the sectors st and su. In order to obtain the Csig cost from Equation (1), the following conditions are considered: if ,2 ,if, 0, ,if, 0, 0otherwise tu tu tu tu tu tu tu cos stu ss ss adjs stu ss ss Kptpu pt pu Css pt pu Css ss 0 2 (2) where K, being a very large value, is defined in the con- figuration file of the network. The K value makes it un- desirable to allocate the same or adjacent frequencies to TRXs that are installed in the same sector. In our ap- proach to solve this problem, this restriction was incor- porated in the creation of the new solution (frequency plan) produced by the algorithm. Therefore, we assure that the solution does not have this severe penalty, which causes the most undesirable interferences as shown in [1] and [3]. 4. Resolution Approach and Development The approach comes in the form of a group of distributed agents in the network where each regional network is overseen by a supervisor agent. That it combines an agent to each cell called a station agent. 4.1. Station Agent An agent can be defined as a computer system located in an environment and which can act autonomously and flexibly to achieve the objectives for which it was de- signed [12] . To each link li is associated an agent Ai responsible of assigning a value fi in its domain Di. Two data are sufficient to characterize the agent out- side its environment: First, the frequency value of the corresponding link: The agent chooses among the values in the frequency domain corresponding to this link: for each Ai in A, the ii D , where is the frequency domain of li. i Second, the difficulty of an agent defined as a quanti- tative measure that reflects the current status of this agent. It is the decision criterion used to choose an agent. It is represented in the form of two essential and sufficient entities that are the degree of separation and the degree of saturation, and it is the criterion used to select the elected agent. D These two entities are intuitively and experimentally Copyright © 2011 SciRes. IJCNS  J. ELHACHMI ET AL. 730 determined. For any agent i A, we note the degree of separation of the corresponding link li as the sum of the incident constraints values to stations. i DA For each Ai in A, where iijij ij DACC C . The degree of saturation at step p is determined from the banned intervals for those links that are not yet as- signed. It can be deduced by the number of unsatisfied constraints. For i A, NIS(Ai) is the number of unsatisfied con- straints with its value fi: , for each such as 0 and 0 iijj jij ij NIS ACAfC . At step p and for each Ai in A, D_SATp(Ai) = NIS(Ai) The agent who has the greatest degree of saturation will be considered as the most on difficulty. Each agent operates in a physical environment; it is its frequency domain. Even though these domains may be identical between several agents, these domains are not shared. Similarly an agent has an unshared copy of constraints that allows it to be independent of other agents. The social Environment consists of all neighbors of an agent from which it has only a partial view. It knows about its neighbors only their values and their difficulties. It has no idea abou t its neighbor s’ con strain ts, views, and domains. The communication is performed by sending messages and a mailbox is associated with each agent that stores the received messages fro m other agen t s [18]. The neighborhood of an agent Ai is defined by all agents connected by a constraint to this agent. For each Ai in A, 0, ij ijij VAA ACC C straints is permanent. Any change of view leads to an e degree of sa ugh cooperation, the random does no d at th , the agent deactivates: he re- po ill carry out the cycle (elec- tio avior of an agent can be presented as follows: ne all of these neighbors . Any change of view leads to an immediate update of the state of constraints. The agent will be in a consistent state at any time. Behavior: The behavior of an agent takes place in three phases: One the one time and through the communication mechanism between the agent and its neighbors that is supposedly in place and robust, conducted by messages, where each message reaches in a finite time. And that each agent always handles the messages it receives, the agent manages to know the degree of saturation and val- ues of agents in its neighborhood. Then decide if it moves or not. At the end of a movement, the corre- sponding environment is maintained. The agent is autonomous, homogeneous in its behav- ior than its performance with those neighbors. Consis- tency between the view of the agent and its local con- immediate update of the state of constraints. Thus an agent will be able to calculate th turation as soon as he knows the value of the agents in its neighborhood. These conditions are not blocking the measure in which agents communicate their information once they have them. Note here that, thro t play a role as might be the case for other methods. This is not to randomly select an agent to explore more options. But rather to select an agent from among those agents considered equals which all lead to a good solu- tion. So the agent with the greatest difficulty will try to improve its situation since he was elected. This phase marks one of the aspects of cooperation: agents let act the agent the greatest difficulty if it isn't the elected. The next phase is only possible for an agent electe e previous phase. The elected agent will select and assign a value that considers the best for him and his neighbors from his private domain of values. And one that minimizes the sum of local cost constraints, based on its current information. At the end of this phase rted to his neighborhood and his supervisor that he will not participate in the next election as one of its neighbors have not been elected. This egalitarian policy for the election allows any neighbor with the less diffi- culty to have the opportunity to be elected. While it is disabled, if one of its neighbors is elected, the agent is still invited to the assignment session: such deactivation is a result of the last phase. Once booted, the agents w n, decision and assignment) but they can not finish themselves. It is the supervisor agent who will take over this task when the execution time limit is reached or a termination criterion is achieved: an overall objective corresponding to the results already kn own for this prob- lem [19]. The beh Step 1: //determi Determine V(Ai); V(Ai) ={Aj A (j i)/C0} / epfor an agent ij /calculate itsdegre of searation Calculate D(Ai); For all Aj V(Aij i) () E //it Ai is the largest D(Ai) then it is the Ai sendsD(Ai) to Aj; Ai Receives D(Aj) ; nd For f the Agen elected If { Aj V(Ai), D(Ai) > D(Aj) } Tnhe Ai is elected; Ai: fi f such as Copyright © 2011 SciRes. IJCNS 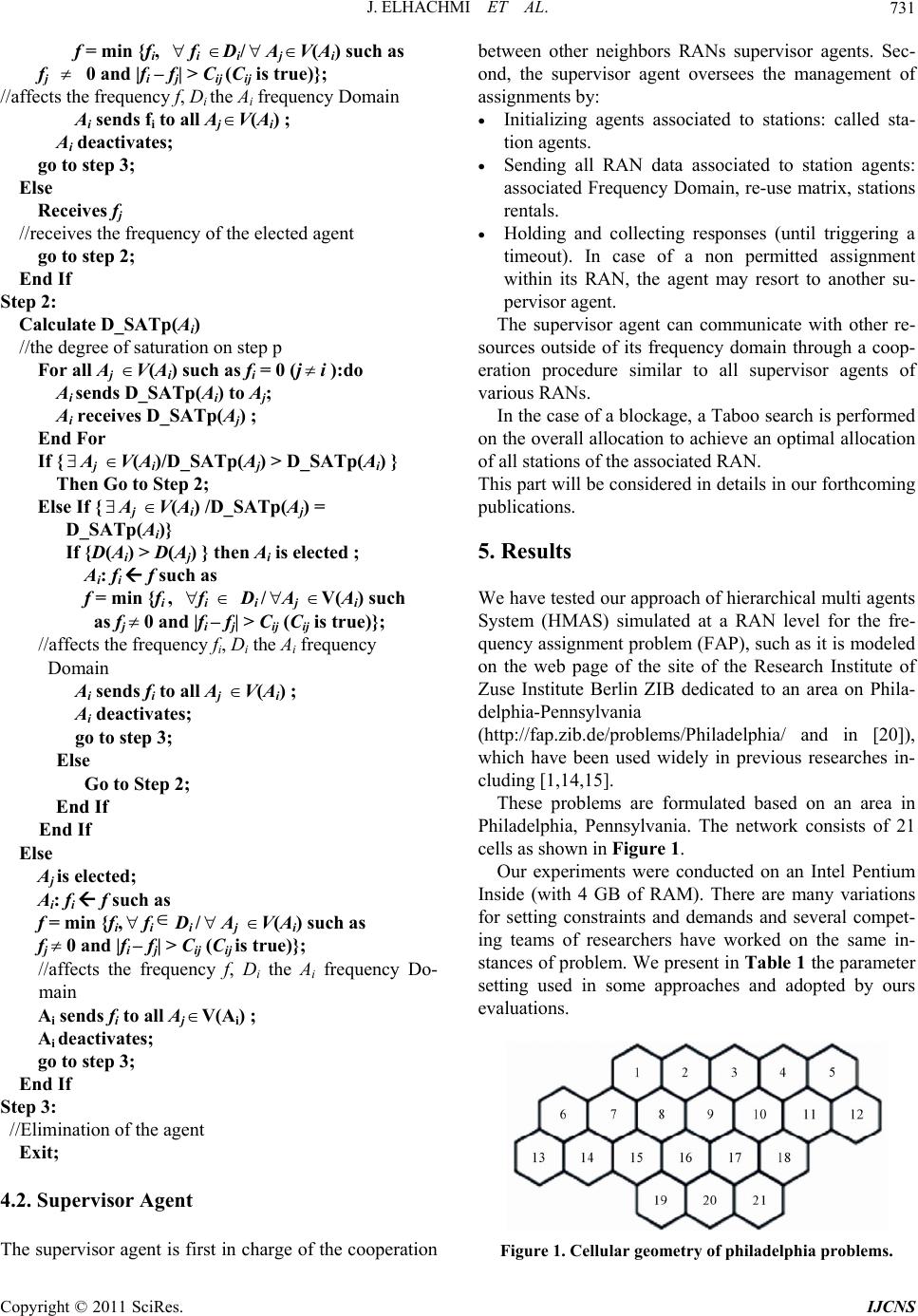 J. ELHACHMI ET AL.731 (A) such as f //aff tDomain A go Eceives f //requency of the elected agent E St late D_SATp(A) step p ( ):do EV(A)/D_SATp(A) > D_SATp(A) } E_SATp(A) = A) } then A is elected ; Di AjV(Ai) such ij i //affects the f ds f to all A f = min {fi, fi Di ji j 0 and |fi – > C(Cij tre)}; ectshe frequency f, Di the Ai frequency /A isV ufj| ij Ai sends fi to all AjV(Ai) ; i to step 3; deactivates; lse Re j eceives the fr go to step 2; nd If ep 2: Calcu i //the degree of saturation on For all Aj V(Ai) such as fi = 0 ji Ai sends D_SATp(Ai) to Aj; Ai receives D_SATp(Aj) ; nd For If {Aj i ji Then Go to Step 2; lse If {Aj V(Ai) /Dj D_SATp(i)} If {D(Ai) > D(Aj i Ai: fi f such as f = min {fi , fi / as fj0 and|fi – fj| > C (Cij s true)}; requency fi, Di the Ai frequency Domain Ai sen i j V(A) ; El o to Step 2; En E E as i A(A) such as –| >C frequency Do- ds f to all AV(A ) ; E St ation of the agent 4.2. Supervisor Agent The supervisor agent is first in charge of the cooperation ents associated to stations: called sta- RAN data associated to station agents: and collecting responses (until triggering a gent can communicate with other re- so a blockage, a Taboo search is performed on in our forthcoming 5. Results We have tested our approach of hierarchical multi agents ems/Philadelphia/ and in [20]), ulated based on an area in Ph nducted on an Intel Pentium In i Ai deactivates; go to step 3; se G d If nd If lse Aj is elected; Ai: fi f such f = min {fi,fiD/j i fj0 and | fi fj Cij (ij is true)}; V //affects the frequency f, Di the Ai main Ai senij i Ai deactivates; go to step 3; nd If ep 3: //Elimin Exit; between other neighbors RANs supervisor agents. Sec- ond, the supervisor agent oversees the management of assignments by: Initializing ag tion agents. Sending all associated Frequency Domain, re-use matrix, stations rentals. Holding timeout). In case of a non permitted assignment within its RAN, the agent may resort to another su- pervisor agent. The supervisor a urces outside of its frequency domain through a coop- eration procedure similar to all supervisor agents of various RANs. In the case of the overall allocation to achieve an optimal allocation of all stations of the associated RAN. This part will be considered in details publications. System (HMAS) simulated at a RAN level for the fre- quency assignment problem (FAP), such as it is modeled on the web page of the site of the Research Institute of Zuse Institute Berlin ZIB dedicated to an area on Phila- delphia-Pennsylvania (http://fap.zib.de/probl which have been used widely in previous researches in- cluding [1,14,15]. These problems are form iladelphia, Pennsylvania. The network consists of 21 cells as shown in Figure 1. Our experiments were co side (with 4 GB of RAM). There are many variations for setting constraints and demands and several compet- ing teams of researchers have worked on the same in- stances of problem. We present in Table 1 the para meter setting used in some approaches and adopted by ours evaluations. Figure 1. Cellular geometry of philadelphia problems. Copyright © 2011 SciRes. IJCNS  J. ELHACHMI ET AL. 732 Instance Nc acc Cii Demand Vector Table 1. Specification for philadelphia pr oblems. P1 12 2 5 Case 1 P2 7 2 5 Case 1 P3 12 2 7 Case 1 P4 7 2 7 Case 1 P5 12 2 5 Case 2 P6 7 2 5 Case 2 P7 12 2 7 Case 2 P8 7 2 7 Case 2 P9 12 2 5 Case 3 P10 12 2 5 Case 4 In this table, “Nc” means the square of required dis- ta 77 28 13 15 31 15 36 57 28 5 8 12 25 30 25 30 40 40 45 20 30 25 15 15 16 16 16 30 36 104 154 56 26 30 6 2 30 72 2 32 60 72 208 308 112 52 60 12 ed with our approach. W lis Instance LAS nce for co-channel constraints, assuming that the dis- tance between adjacent cells is 1. For example, if Nc = 12, while cell 1 and cell 5 can use the same frequency (the distance is 4), cell 1 and cell 4 cannot (the distance is 3). “acc” represents the separation required for adjacent channel constraints, and “Cii” represents co-site con- straints. The demand vectors used in the table are as fol- lows (case 3 and case 4 are obtained by multiplying 2 and 4 to case 1, respectively): Case 1: (8 25 8 8 8 15 1 8 52 8 10 13 8) Case 2: (5 5 30 20 20 25) Case 3: (16 50 114 56 16 20 26 16) Case 4: (32 100 32 3 4 60 144 22 8 11 2 32 40 52 32). Table 2 shows the results obtain e consider the theoretical lower-bounds as it repre- sented in [1,5,20], and we use the best solution obtained so far. Ours results are compared with results of the best tree methods, from seven reported methods. The tree me- thods are: First, a constraint satisfaction method (CS) and second a Neural network (NN).the third a Simulated An- nealing (SA). The last row in the table shows our results. To the extent of the authors' knowledge, the best pub- hed results for these problems have been obtained by FASoft [1,9,15,20]. FASoft is an integrated package of various methods for solving frequency assignment prob- lems, such as heuristic sequential methods, methods us- ing constraint satisfaction techniques, Simulated An- nealing, GA, Tabu search, etc. We show the results ob- tained with Simulated Annealing (SA) and Tabu search (TS) reported in [9]. These two methods are the most Table 2. Comparaison of solution quality. ower bounds CS NN SE HM P1 427 427 427 460 427 P2 427 427 427 447 427 P3 533 533 536 536 533 P4 533 533 533 533 533 P5 258 258 283 283 258 P6 253 253 270 270 253 P7 309 309 310 310 309 P8 309 309 310 310 309 P9 856 856 … … 856 P10 17141714… … 1714 fficient among the various components of FASoft. Fur- 2, our algorithm obtains opti- m orithm in e thermore, we show the best results obtained with a set of heuristic sequential methods (SE) reported in [5], and the results obtained with neural networks (NN) reported in [6], and the results obtained with a constraint satisfaction method (CS) repor ted in [1] (“...” in the table means that the result is not reported). As shown in the Table al solutions for all instances. Moreover, this method can obtain better or equivalent solutions compared with existing methods for all problem instances, To examine the efficiency of the proposed alg larger-scale problems, we show the evaluation results for the benchmark problems presented in [15,19]. There are 7*7 symmetrically placed cells (49 cells in all) in these problems. Problem parameters are described in Table 3, where “Cij” is the minimal frequency separation between any pair of cells whose distance is less than c N, except for adjacent cells. The demand vector is: 4 11 13 15 23 21 25 19 20 21 17 10 18 27 23 29 10 17 16 22 14 19 14 22 27 28 25 30 1 4 18 28 26 12 10 27 29 11 18 24 24 20 25 12 22 25 29 19 14). This vecto r is randomly generated from a uniform distribution between 10 and 30. There are 976 calls in total. Table 4 shows the results obtained with our new method (hybrid Taboo search). For comparison, we show the results described in [15], i.e., the results obtained using neural networks (NN), and the best results obtained with a constraint sat- isfaction method (CS). Since the optimality of the obtaine (19 1 d solution is guar- anteed, and the execution time for these instances is very short, our approach obtains much better solutions than those of NN and CS for all instances and a very high- quality solutions are obtained within a reasonably short running time. Copyright © 2011 SciRes. IJCNS  J. ELHACHMI ET AL.733 ification for Kim’s benchmark proble ms. Instance cij ii Table 3. Spec N C acc C K1 7 1 1 3 K2 7 2 3 5 K3 7 3 4 7 Table 4. Comparison of solution quality. Instance CS NN SE HMAS K1 168 168 178 164 K2 422 435 473 408 K3 619 630 673 594 6. Conclusions and Future Issues In this algorithm, we represent a link as a variable with a rimental evaluations using real standard bench- m ll-suited to this prob- le 7. Acknowledgements The authors are grateful to all members of the Laboratory 8. References [1] M. da S. Maximiano, M. A. Vega-Rodríguez, J. A. Gómez- very large domain, and determine the variable value dy- namically and step by step. Which is handled by a com- puter system located in the environment and can act autonomously and flexibly to achieve the objectives for which it was designed. Furthermore, we have developed a powerful cell-ordering heuristic and introduced the limited discrepancy search to cope with large-scale pro- blems. Expe ark problems showed that for most of the problem in- stances, our approach can find better or equivalent solu- tions compared with existing current optimization meth- ods. These results imply that paradigm of distributed agents is capable of solving realistic application prob- lems, if we choose the appropriate problem representa- tion, and provides a conceptual framework for modeling and simulating a complex system. Furthermore, it is particularly we m and offers distinct advantages compared to existing methods. It incorporates an extra macro-level manage- ment and handling all RANs in a localized region re- gardless of the operating band, where each regional net- work is overseen by a supervisor. It shows more effi- ciency in terms of flexibility and autonomy. It is con- tinuously adaptable for a new insertion if a reallocation of radio frequency resources must be made. Since the system can be added to, modified and reconstructed, without the need for detailed rewriting of the application. This system also tends to be rapidly self-recovering and failure proof, usually due to the heavy redundancy of components and the self managed features. We can say that our approach is justified by: Adapting to reality, cooperation, the integration of expertise incomplete, modularity, effectiveness and reliability. Our future work s also include evolutionary multi-agent algorithms that are stronger, introducing the hybrid genetic algorithms with iterative improvement of search. of Electronics and Telecommunications in Mohammadia School of Engineers (EMI) for the contribution of their ideas, and for the contribution of such an approach and who, in one way or another, have helped to improve it. Pulido and J. M. Sánchez-Pérez, “A Hybrid Differential Evolution Algorithm to Solve a Real-World Frequency Assignment Problem,” International Multiconference on Computer Science and Information Technology, Wisia, 20-22 October 2008, pp. 201-205. doi:10.1109/IMCSIT.2008.4747240 [2] M. Yokoo and K. Hirayama, “Frequency Assignment for Bounds for a Class of Fre- Cellular Mobile Systems Using Constraint Satisfaction Techniques,” Principles and Practice of Constraint Pro- gramming, Lecture Notes in Computer Science, Vol. 1713, 1999, pp. 490-491. [3] A. Gamst, “Some Lower quency Assignment Problems,” IEEE Transactions on Vehicular Technology, Vol. 35, No. 1, 1986, pp. 8-14. doi:10.1109/T-VT.1986.24063 [4] J. K. Hao, R. Dorne and P. Galinier, “Tabu Search for Frequency Assignment in Mobile Radio Networks,” Journal of Heuristics, Vol. 4, No. 1, 1998, pp. 47-62. doi:10.1023/A:1009690321348 [5] K. N. Sivarajan, R. J. McEliece and J. W. Ketchum, “Chan- nel Assignment in Cellular Radio,” Proceedings of 39th IEEE Vehicular Technology Society Conference, San Francisco, 1-3 May 1989, pp. 846-850. doi:10.1109/VETEC.1989.40173 [6] N. Funabiki, N. Okutani and S. Nishikawa, “A Three- . Grindal, “Automatic Frequency As- ment: Theory and Appli- stage Heuristic Combined Neural Network Algorithm for Channel Assignment in Cellular Mobile Systems,” IEEE Transactions on Vehicular Technology, Vol. 9, No. 2, 2000, pp. 397-403. [7] M. Carlsson and M signment for Cellular Telephones Using Constraint Sat- isfaction Techniques,” Proceedings of the Tenth Interna- tional Conference on Logic Programming, MIT Press Cambridge, 1993, pp. 647-663. [8] W. K. Hale, “Frequency Assign cation,” Proceedings of the IEEE, Vol. 68, No. 12, 1980, pp. 1497-1513. doi:10.1109/PROC.1980.11899 [9] S. Hurley, D. H. Smith and S. U. Thiel, “FASoft: A Sys- tem for Discrete Channel Frequency Assignment,” Radio Science, Vol. 32, No. 5, 1997, pp. 1921-1939. doi:10.1029/97RS01866 Copyright © 2011 SciRes. IJCNS  J. ELHACHMI ET AL. Copyright © 2011 SciRes. IJCNS 734 d S. U. Thiel, “Improving Heu-[10] D. H. Smith, S. Hurley an ristics for the Frequency Assignment Problem,” Euro- pean Journal of Operational Research, Vol. 107, No. 1, 1998, pp. 76-86. doi:10.1016/S0377-2217(98)80006-4 [11] D. Kunz, “Channel Assignment for Cellular Radio Using Neural Networks,” IEEE Transactions on Vehicular Tech- nology, Vol. 40, No. 1, 1991, pp. 188-193. doi:10.1109/25.69987 [12] N. Funabiki and Y. Takefuji, “A Neural Network Parallel Algorithm for Channel Assignment Problems in Cellular Radio Networks,” IEEE Transactions on Vehicular Tech- nology, Vol. 41, No. 4, 1992, pp. 430-437. doi:10.1109/25.182594 [13] J. Elhachmi and Z. Guenoun, “Frequency Assignment for ishra, “Fundamentals of Cellular Network Plan- Cellular Mobile Systems Using a Hybrid Tabu Search,” Journal of Telecommunications, Vol. 8, No. 1, 2011, pp. 11-15. [14] A. R. M ning and Optimisation: 2G/2.5G/3G... Evolution to 4G,” Wiley, Hoboken, 2004, pp. 21-54. doi:10.1002/0470862696 [15] F. Luna, C. Blum, E. Alba and A. J. Nebro, “ACO vs ET Docket No. 03-322 Notice of Proposed Rule J. Durillo, “Solving EAs for Solving a Real-World Frequency Assignment Problem in GSM Networks,” ACM, New York, pp. 94- 101, [16] FCC, Making and Order, December 2003. [17] F. Luna, A. J. Nebro, E. Alba and J. Large-Scale Real-World Telecommunication Problems Using a Grid-Based Genetic Algorithm,” Engineering Optimization, Vol. 40, No. 11, 2008, pp. 1067-1084. doi:10.1080/03052150802294581 [18] F. Cornet, “Etude d’un Problème D’Allocation de Fré- enoun, “A Multi-Agent System for Quences par Systèmes Multi-Agents Adaptatifs,” Re- search Master IARCL Report, Université Paul Sabatier, Toulouse, June 2006. [19] J. Elhachmi and Z. Gu Resource Management in GSM Cellular Networks,” In- ternational Symposium on Distributed Computing and Artificial Intelligence, Advances in Intelligent and Soft Computing, Vol. 91, 2011, pp. 99-106. doi:10.1007/978-3-642-19934-9_13 [20] R. Haralick and G. L. Elliot, “Increasing Tree Search Efficiency for Constraint Satisfaction Problems,” Artifi- cial Intelligence, Vol. 14, No. 1, 1980, pp. 263-313. doi:10.1016/0004-3702(80)90051-X
|