A. A. KHALATE ET AL.
Copyright © 2011 SciRes. ICA
370
trol scheme is effective in reducing chattering in torque
control signal and simultaneously control effort is less in
comparison to the results in [2].
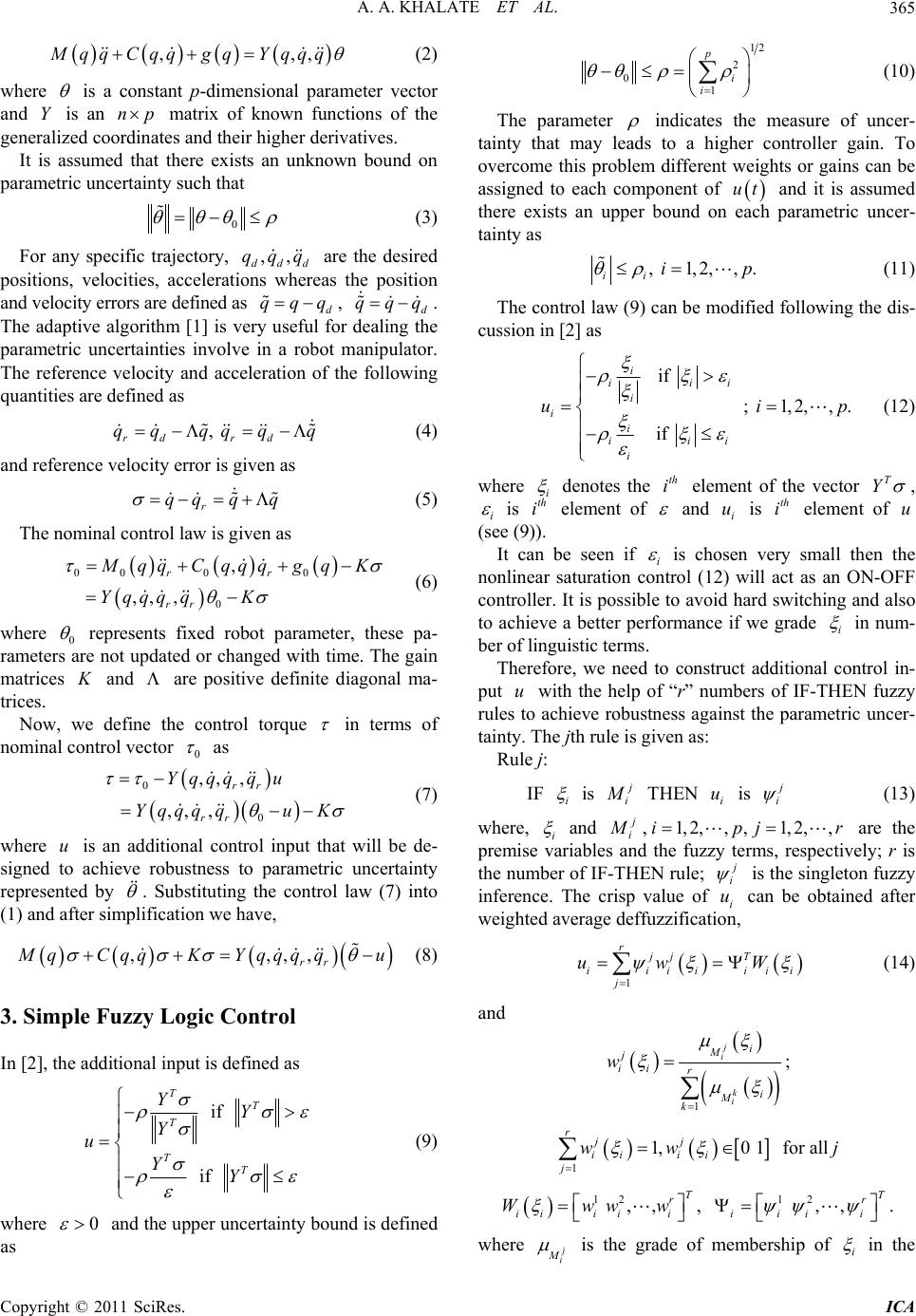
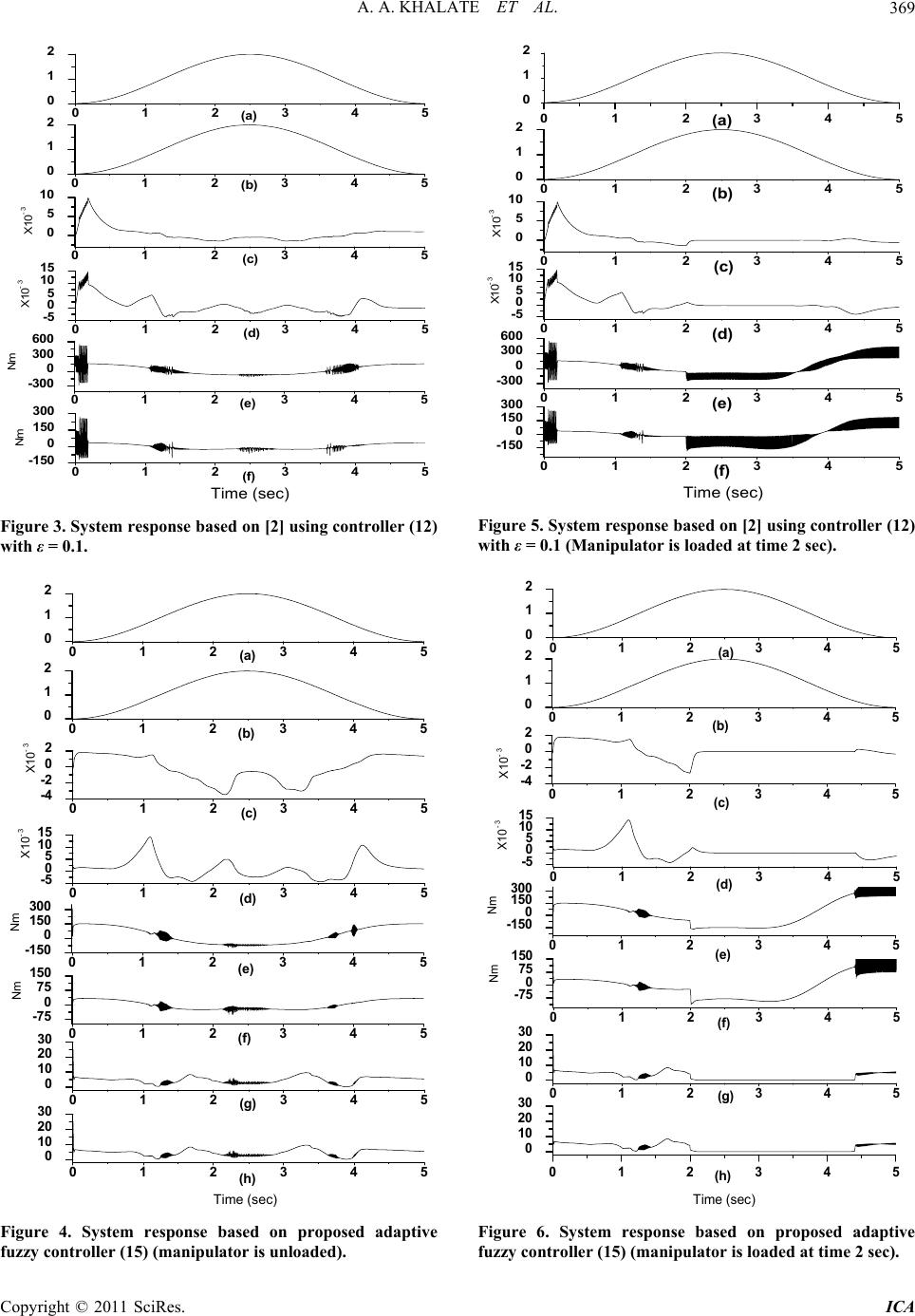
the system response of a two-link robot manipulator based
on nonlinear saturation controller [2] and proposed adap-
tive fuzzy controller (15) for two cases while the robot
manipulator is (i) unloaded (ii) loaded. Results are pre-
sented in the following sequences in the figures: joint
positions (joint-1 (1), joint-2 (2)), tracking errors (1
and 2), and input torques (1
q qq
q
and 2
) respectively. It
may be mentioned that the robot manipulator is loaded at
time 2 sec. i.e. the second link lifts some mass due to
which the parameter of the robot changes as given in
(38).
7. References
[1] J. J. E. Slotine and W. Li, “On the Adaptive Control of
Robotic Manipulators,” International Journal of Robotics
Research, Vol. 6, No. 3, 1987, pp. 49-59.
doi:10.1177/027836498700600303
[2] M. W. Spong, “On the Robust Control of Robot Manipu-
lators,” IEEE Transactions on Automatic Control, Vol.
37, No. 11, 1992, pp. 1782-1786. doi:10.1109/9.173151
The results of the proposed adaptive fuzzy controller
are compared with that of [2] (see (12)) where fixed PD
controller gains are considered as and
. In both the methods, it is observed that
the tracking error responses remain almost the same or-
der and insensitive irrespective of the payload variation.
Further it has been observed through simulation studies
that the proposed technique effectively alleviates or re-
duces the chattering effect in control signals. A signifi-
cant chattering in the control signal is noticed while a
robot arm takes a sharp turn under loaded condition.
Simulation result shows that the proposed controller ef-
fectively reduces the magnitude of input torque or in
other words effectively reduces the control effort com-
pared to the method discussed in [2]. It may be further
observed from the figures ((see Figures 4(g)-(h) and
Figures 6(g)-(h)) how the diagonal elements of gain
matrix
diag75 50K[3] A. B. Sharkawy, M. M. Othman and A. M. A. Khalil, “A
Robust Fuzzy Tracking Control Scheme for Robotic Ma-
nipulators with Experimental Verification,” Intelligent Con-
trol and Automation, Vol. 2, No. 2, 2011, pp. 100-111.
doi:10.4236/ica.2011.22012
diag40 15
(11 22
,
K) of PD controller are updated adap-
tively.
[4] M. Galicki, “An Adaptive Regulator of Robotic Manipu-
lators in the Task Space,” IEEE Transactions on Auto-
matic Control, Vol. 53, No. 4, 2008, pp. 1058-1062.
doi:10.1109/TAC.2008.921022
[5] M. W. Spong, S. Hutchinson and M. Vidyasagar, “Robot
Modeling and Control,” John Wiley & Sons Inc., New
York, 2006.
[6] C. C. Cheah, C. Liu and J. J. E. Soltine, “Adaptive Track-
ing Control for Robots with Unknown Kinematics and
Dynamic Uncertainty,” International Journal of Robotics
Research, Vol. 25, No. 3, 2006, pp. 283-296.
doi:10.1177/0278364906063830
[7] T. H. S. Li and Y. C. Huang, “MIMO Adaptive Fuzzy
Terminal Sliding-Mode Controller for Robotic Manipu-
lators,” Information Sciences, Vol. 180, No. 23, 2010, pp.
4641-4660. doi:10.1016/j.ins.2010.08.009
6. Conclusions
[8] Z. Bingul and O. karahan, “A Fuzzy Logic Controller
Tuned with PSO for 2 DOF Robot Trajectory Control,”
Expert Systems with Applications, Vol. 38, No. 1, 2011,
pp. 1017-1031. doi:10.1016/j.eswa.2010.07.131
In this paper, an adaptive fuzzy control law is proposed
for trajectory tracking of robot manipulator with a view
to reduce the chattering effect in torque control signal.
The advantages of fuzzy and adaptive control strategies
are combined and subsequently the stability condition of
robot manipulator is derived based on Lyapunov theorem.
The implementation of proposed controller is very
straightforward due to the use of simple fuzzy rules and
control strategies. The gain of PD term is updated
with time and hence proposed adaptive control scheme
removes the disadvantage of using fixed large gain val-
ues in [2]. Simulation results show that the present con-
K
[9] L.-X. Wang, “Stable Adaptive Fuzzy Control of Nonlin-
ear Systems,” IEEE Transactions on Fuzzy Systems, Vol.
1, No. 2, 1993, pp. 146-155.
[10] G. Feng, “A Survey on Analysis and Design of Model-
Based Fuzzy Control Systems,” IEEE Transactions on
Fuzzy Systems, Vol. 14, No. 5, 2006, pp. 676-697.
[11] M. W. Spong and M. Vidyasagar, “Robot Dynamics and
Control,” Wiely, New York, 1989.
[12] L. X. Wang, “A Course in Fuzzy Systems and Control,”
Prentice-Hall, Englewood Cliffs, 1997.