Paper Menu >>
Journal Menu >>
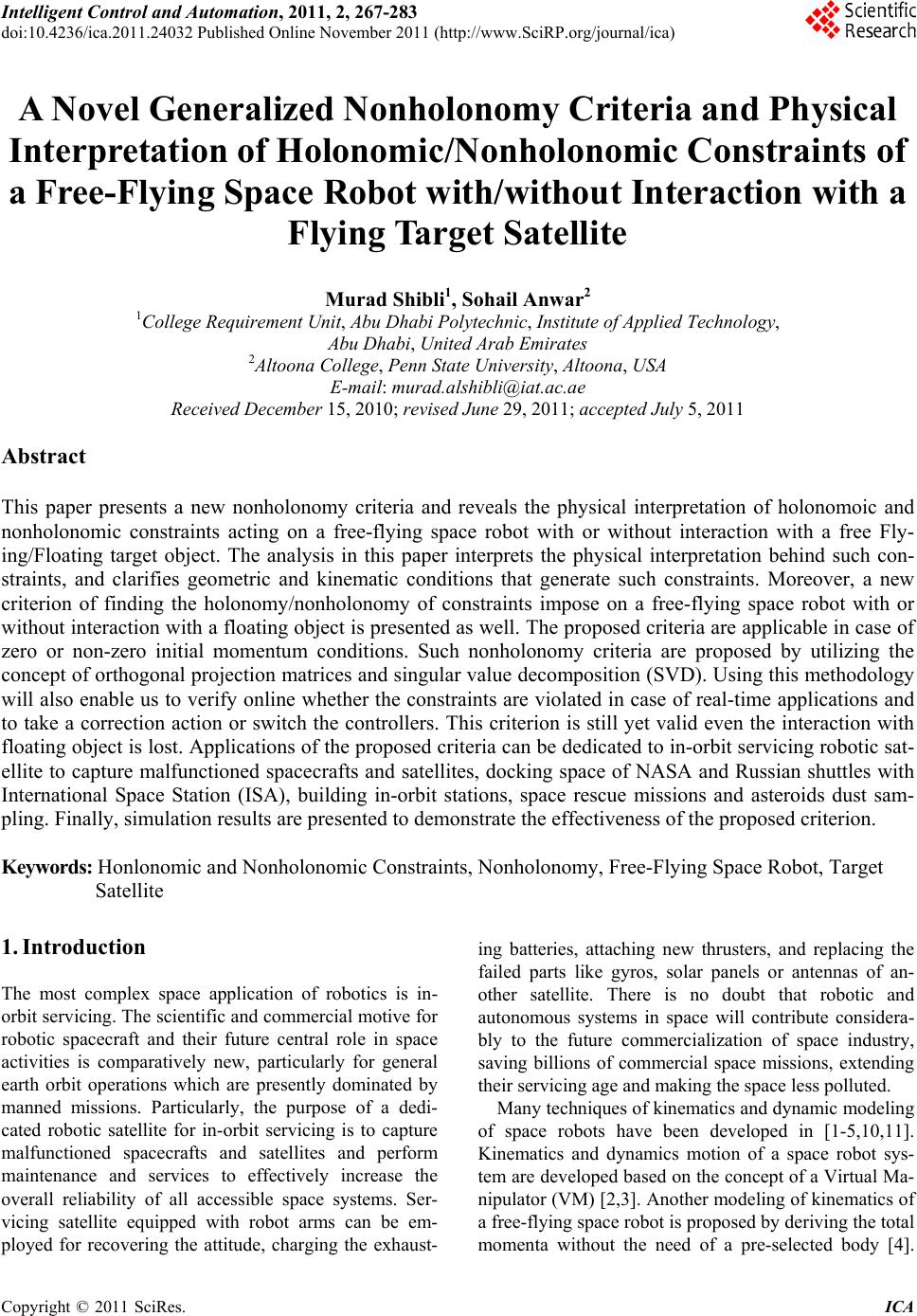 Intelligent Control and Automation, 2011, 2, 267-283 doi:10.4236/ica.2011.24032 Published Online November 2011 (http://www.SciRP.org/journal/ica) Copyright © 2011 SciRes. ICA A Novel Generalized Nonholonomy Criteria and Physical Interpretation of Holonomic/Nonholonomic Constraints of a Free-F lyin g S pac e R obo t w ith /without Interaction with a Flying Target Satellite Murad Shibli1, Sohail Anwar2 1College Requirement Unit, Abu Dhabi Polytechnic, Institute of Applied Technology, Abu Dhabi, United Arab Emirates 2Altoona College, Pen n St a t e U ni ve rsi ty, Altoona, USA E-mail: murad.alshibli@iat.ac.ae Received December 15, 2010; revised June 29, 2011; accepted July 5, 2011 Abstract This paper presents a new nonholonomy criteria and reveals the physical interpretation of holonomoic and nonholonomic constraints acting on a free-flying space robot with or without interaction with a free Fly- ing/Floating target object. The analysis in this paper interprets the physical interpretation behind such con- straints, and clarifies geometric and kinematic conditions that generate such constraints. Moreover, a new criterion of finding the holonomy/nonholonomy of constraints impose on a free-flying space robot with or without interaction with a floating object is presented as well. The proposed criteria are applicable in case of zero or non-zero initial momentum conditions. Such nonholonomy criteria are proposed by utilizing the concept of orthogonal projection matrices and singular value decomposition (SVD). Using this methodology will also enable us to verify online whether the constraints are violated in case of real-time applications and to take a correction action or switch the controllers. This criterion is still yet valid even the interaction with floating object is lost. Applications of the proposed criteria can be dedicated to in-orbit servicing robotic sat- ellite to capture malfunctioned spacecrafts and satellites, docking space of NASA and Russian shuttles with International Space Station (ISA), building in-orbit stations, space rescue missions and asteroids dust sam- pling. Finally, simulation results are presented to demonstrate the effectiveness of the proposed criterion. Keywords: Honlonomic and Nonholonomic Constraints, Nonholonomy, Free-Flying Space Robot, Target Satellite 1. Introduction The most complex space application of robotics is in- orbit servicing. The scientific and commercial motive for robotic spacecraft and their future central role in space activities is comparatively new, particularly for general earth orbit operations which are presently dominated by manned missions. Particularly, the purpose of a dedi- cated robotic satellite for in-orbit servicing is to capture malfunctioned spacecrafts and satellites and perform maintenance and services to effectively increase the overall reliability of all accessible space systems. Ser- vicing satellite equipped with robot arms can be em- ployed for recovering the attitude, charging the exhaust- ing batteries, attaching new thrusters, and replacing the failed parts like gyros, solar panels or antennas of an- other satellite. There is no doubt that robotic and autonomous systems in space will contribute considera- bly to the future commercialization of space industry, saving billions of commercial space missions, extending their servicing age and making the space less polluted. Many techniques of kinematics and dynamic modeling of space robots have been developed in [1-5,10,11]. Kinematics and dynamics motion of a space robot sys- tem are developed based on the concept of a Virtual Ma- nipulator (VM) [2,3]. Another modeling of kinematics of a free-flying space robot is proposed by deriving the total momenta without the need of a pre-selected body [4].  M. SHIBLI ET AL. 268 While in [5] the kinematics of a free-flying multi-body system is investigated by introducing the conservation of momentum and deriving a new Jacobian matrix called the Generalized Jacobian. In research [6], the kinematics and dynamics of free-floating coordinated space robotic system with closed kinematic constraints are developed. An approach to position and force control of free-float- ing coordinated space robots with closed kinematic con- straints is proposed for the first time. Unlike previous coordinated space robot control methods which are for open kinematic chains, the method presented here ad- dresses the main difficult problem of control of closed kinematic chains. The controller consists of two parts, position controller and internal force controller, which regulate, respectively, the object position and internal forces between the object and end-effectors. A planar FFSR with a 2 DOFs manipulator is selected to test the algorithm and simulation results illustrate that the path following is realized precisely. The genetic algorithm with wavelet approximation is applied to nonholonomic motion planning in [7]. The problem of nonholonomic motion planning is formulated as an optimal control problem for a drift. When a robot end-effecter interacts with a stationary environment or moving object, it imposes a geometric holonomic (integrable) constraint [2,9,11]. The conser- vation of momentum exerts kinematic-like constraints on a space robot in the absence of external forces. The linear momentum is considered as holonomic but the angular momentum as nonholonomic (non-integrable) [11]. Con- trol of nonholonomic system received a great attention of the research developed in [8,11-13,14]. Research [15] addresses modeling, simulation and controls of a robotic servicing system for the hubble space telescope servicing missions. The simulation models of the robotic system include flexible body dynamics, control systems and geometric models of the contacting bodies. These models are incorporated into MDA’s simulation facilities, the multibody dynamics simulator “space station portable operations training simulator (SPOTS)”. In [16], the kinematics of the FFSR is introduced firstly. Then the null space approach is used to reparameterize the path: the direction and magnitude are decoupled and no direc- tion error is introduced. And the Newton iterative me- thod is adopted to find the optimal magnitude of the joint velocity. The inverse kinematic control based on mutual mapping neural network of free-floating dual-arm space robot system without the basepsilas control is discussed in [17]. With the geometrical relation and the linear, an- gular momentum conservation of the system, the gener- alized Jacobian matrix is obtained. To solve the challenge of nonintegrability of principle of conservation of angular momentum many researchers have proposed different schemes. A nonholonomic path planning of space robots is proposed in [8] via bi-direc- tional approach. The spacecraft orientation can be con- trolled in addition to the joint variables of the manipula- tor, by actuating only the joint variables, if the trajectory is carefully planned. A major characteristic of a space robot is clearly the distinction from ground-based robot is the lack of a fixed base in space environment [5]. Since the conservation of momentum exerts kinematic- like constraints on a space robotic system in the absence of external forces, one may raise the question: what is the physical interpretation of such a behavior? Some re- searchers have looked at this problem from trajectory planning point of view, From trajectory planning point of view, not all trajectories and displacements (velocities) are allowed due to the conservation of momentum and geometric constraints [8,11]. The physical meaning be- hind these constraints is that they restrict the kinemati- cally possible displacements (possible values of the ve- locities) of the individual parts of the system. The physical characteristics of the nonholonomic con- straints are exhibited by the fact that even if the manipu- lator joints return to their initial configuration after a sequence of motion, the vehicle orientation may not be the same as the initial value [8]. If a space robot is oper- ated in a certain task, position and attitude of the base satellite are disturbed by reaction forces and moments due to the robot motion, so it cannot accomplish a task without provision for this disturbance. No space ma- nipulator can avoid the reaction disturbance. Physical interpretation of such behavior will give us more idea about the nature of holonomic and nonholonomic con- straints and geometric conditions that generate those constraints. Verifying the intergrability of holonomic and nonholnomic constrained systems has attracted the atten- tion of several studies [8-18]. Frobenius theorem is a well- known approach to answer the question of integrability of such systems under concern. Conditions of the inte- grability of nonholonomic systems are reported using Lie algebra techniques in [8]. A necessary and sufficient condition is reported by using what is called bilinear co- variants in [12,13-18]. Nonholomic behavior of a free- flying space robot is investigated in the absence of ex- ternal forces by Lie algebra techniques [8]. Differen- tial-form-based integrability conditions for dynamic con- straints using the Frobenius theorem are proposed in [19]. In the latter, the conditions can be used for the classifica- tion of holonomic and nonholonomic constraints. Unfor- tunately, using Lie algebra and bilinear covariant is cum- bersome and time consuming in the case of complicated space robotic systems. This paper presents a new methodology to determine holonomy/nonholonomy of constraints impose on a free- Copyright © 2011 SciRes. ICA 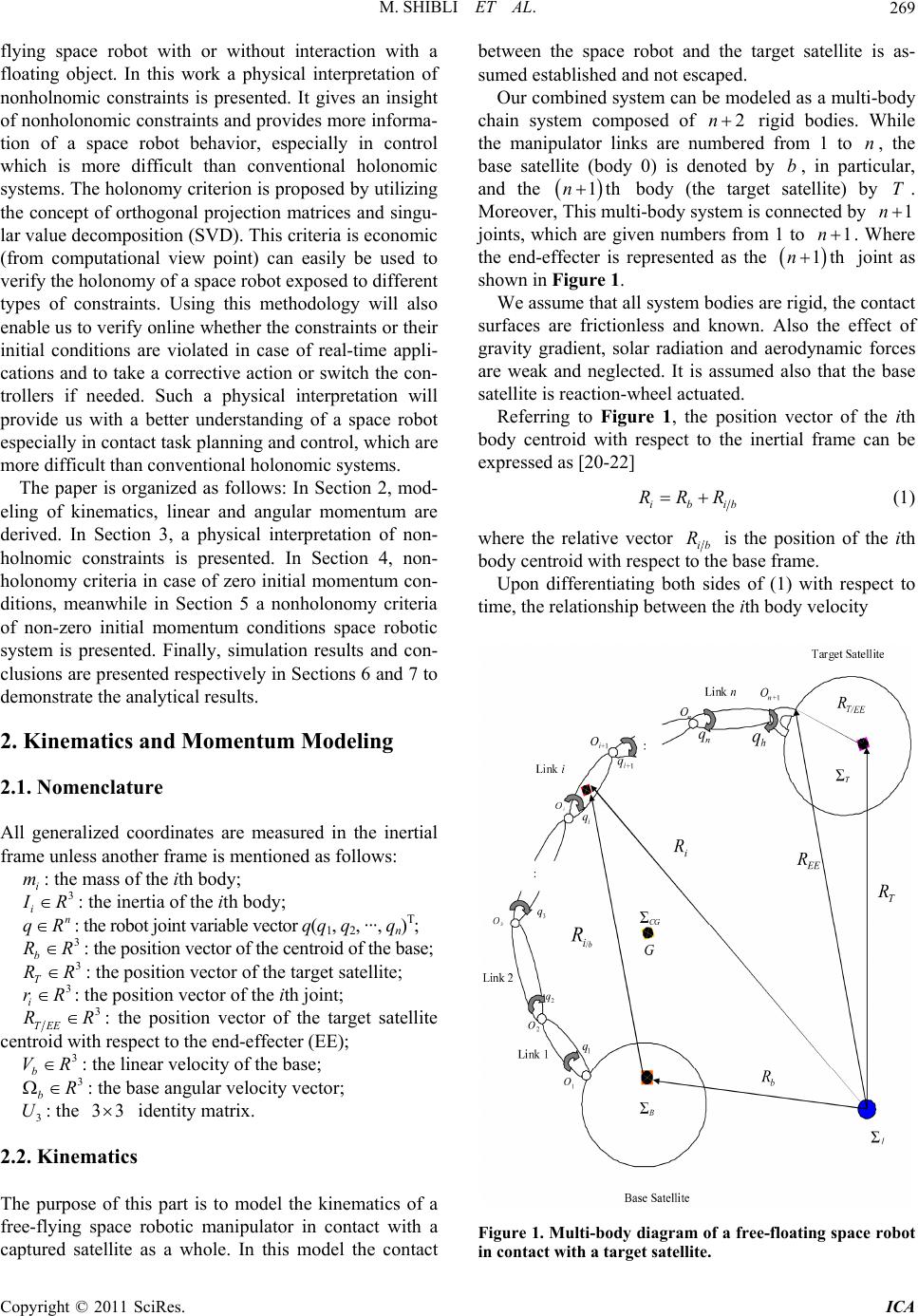 M. SHIBLI ET AL.269 flying space robot with or without interaction with a floating object. In this work a physical interpretation of nonholnomic constraints is presented. It gives an insight of nonholonomic constraints and provides more informa- tion of a space robot behavior, especially in control which is more difficult than conventional holonomic systems. The holonomy criterion is proposed by utilizing the concept of orthogonal projection matrices and singu- lar value decomposition (SVD). This criteria is economic (from computational view point) can easily be used to verify the holonomy of a space robot exposed to different types of constraints. Using this methodology will also enable us to verify online whether the constraints or their initial conditions are violated in case of real-time appli- cations and to take a corrective action or switch the con- trollers if needed. Such a physical interpretation will provide us with a better understanding of a space robot especially in contact task planning and control, which are more difficult than conventional holonomic systems. The paper is organized as follows: In Section 2, mod- eling of kinematics, linear and angular momentum are derived. In Section 3, a physical interpretation of non- holnomic constraints is presented. In Section 4, non- holonomy criteria in case of zero initial momentum con- ditions, meanwhile in Section 5 a nonholonomy criteria of non-zero initial momentum conditions space robotic system is presented. Finally, simulation results and con- clusions are presented respectively in Sections 6 and 7 to demonstrate the analytical results. 2. Kinematics and Momentum Modeling 2.1. Nomenclature All generalized coordinates are measured in the inertial frame unless another frame is mentioned as follows: i m: the mass of the ith body; 3 i I Rn qR : the inertia of the ith body; : the robot joint variable vector q(q1, q2, ···, qn)T; 3 RR b3 RR : the position vector of the centroid of the base; T3 rR : the position vector of the target satellite; i: the position vector of the ith joint; 3 TEE R f and the R: the position vector of the target satellite centroid with respect to the end-effecter (EE); 3 b VR 3 R : the linear velocity of the base; b U: the base angular velocity vector; 3: the identity matrix. 33 2.2. Kinematics The purpose of this part is to model the kinematics of a free-flying space robotic manipulator in contact with a captured satellite as a whole. In this model the contact between the space robot and the target satellite is as- sumed established and not escaped. Our combined system can be modeled as a multi-body chain system composed o2 rigid bodies. While the manipulator links are numbered from 1to n, the base satellite (body 0) is denot by b, in particular, n ed 1thn body (the target satellite) by T. Moreover, This multi-body system is connecty 1n ed b joints, which are given numbers from 11n to . Where the end-effecter is represented as the joint as shown in Figure 1. n 1th We assume that all system bodies are rigid, the contact surfaces are frictionless and known. Also the effect of gravity gradient, solar radiation and aerodynamic forces are weak and neglected. It is assumed also that the base satellite is reaction-wheel actuated. Referring to Figure 1, the position vector of the ith body centroid with respect to the inertial frame can be expressed as [20-22] ibi RRR b (1) where the relative vector ib R is the position of the ith body centroid with respect to the base frame. Upon differentiating both sides of (1) with respect to time, the relationship between the ith body velocity Figure 1. Multi-body diagram of a free-floating space robot in contact with a target satellite. Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. 270 ib bib VVR v i (2) where i is the linear velocities of the ith body in base coordinates. Now in the case of any ith body of the ma- nipulator, the velocity i can be expressed in terms of the linear Jacobian matrix as v v i iL vJq (3) where 112 2 ,,,,0, i Li iiii JzRrzRr zRr ,0 (4) The end-effecter tip velocity is given by EE EEbbEE bL VVR J q (5) Additionally, the velocity T of the target satellite in the reference frame can be obtained by deriving Equation applying (1) as V T TbbTbL TTEE VVR JqRv T (6) Since the target satellite is not stationary, (6) shows the relative linear and angular velocities T, T v be- tween the end effecter and the target satellite and meas- ured in the base frame. Another relationship is needed between the ith body angular velocity and joint angular velocity i ibi (7) where i is the angular velocities of the ith body in base coordinates and i in case of the manipulator is given by i iA J q (8) where the angular Jacobian 12 ,,,,0,,0 i Ai Jzzz (9) While in the case of the target satellite, the absolute angular velocity of can be expressed as EE TbA Jq T (10) 2.3. Linear and Angular Momentum The linear and angular momentum of a multi-body sys- tem is a key part in understanding the motion of the sys- tem when it is not subjected to external forces. They may impose kinematic-like constraints when the system is free of any external force. The linear momentum and angular momentum of the whole system is given by P L 1 0 n ii i Pm V V (11) 1 0 nBiiii i i LImR (12) By means of (1)-(10), linear and angular momentum in (11)-(12) can then be represented in a compact form as bbb b Vb b bb bT bT bT bT VV Vq b Tbq VVv T T v MM M V Pq MM LM MM v MM (13) where each block of the matrix is defined as follows 133 3 0 b n Vi i M UmR (14) 133 0, bb n Viib iib M mR R (15) 13 0, bi nn Vqi L iib M mJ R (16) 133 0, b n ii ibb iib M ImDRI R (17) 13 0, biL i n B n qiAiib iib M IJm RJR (18) 33 1 bT VnTEE M mR R (19) 33 1 bT b iTEE n M mD RIR (20) 33 31 bT Vv n M Um R (21) 33 11 bT vnn M mR R (22) Note that the matrix function R for a vector ,, T xyz RRRR is defined as 33 0 0 0 zy zx yx RR RR RR RR 3 (23) and 22 22 3 22 T yz xyxz xyx zyz xzyzxy DR RR RR RRRR RRR RRRR RRRRR R (24) and the sub-matrices of the Jacobian of the ith body rep- resenting the linear and angular parts are defined before. Note that as in (13) the system is subjected to a non- holonomic (non-integrable) constraint because of con- servation of angular momentum in the absence of exter- nal forces. On the contrast, the linear momentum results Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL.271 in a holonomic (integrable) constraint. 3. Physical Interpretation of Nonholonomic Constraints 3.1. Free-Flying Space Robot In this section a physical explanation of the nonholo- nomic constraint imposed on a free-flying space robot. When no external forces are applied, and in the absence of gravity and dissipation forces, the linear and angular momentum of the multibody system are conserved. Then by virtue of the principle of virtual work by d’Almberts-Lagrange equation [12,18] 0 0 n ii iii i mRfF R (25) In which it implies no work as a result of the virtual displacement i R measured in frame fixed at the center of mass as shown in Figure 1. The position vector of the ith body can be given as ibi RRR b (26) where i is the position vector from the fixed center to the ith body, b is the position vector form the center of mass to the base satellite, and R C R ib R is the vec- tor from the base to ith body. Now taking the displacement of vector , we obtain i R ddd d ib ibLi RR RJi q (27) Similarly, the virtual displacement can be stated as /ib ibLi RR RJ i q (28) where q is the angular virtual displacement by which the base body rotates about the virtual axis of rotation , i is the virtual angular displacement of robot ith body, and L i J is the linear Jacobian defined as ii i io kRr n . Substituting for n iii io kRr L i J in Equation (28) leads /ibib iii io RRR kRr n i q (29) Now substitute the virtual displacement (29) into d’Almberts-Lagrange Equation (25) to have n ii biiibiiiii io n ibiibi iiii io n ibiibi iiii io mRRmRRmRkR r q fRfR fkRrq FRFRFk Rrq i (30) In Equation (30) the expressions on the right hand side represent the virtual work of the internal forces i f and the external forces i F which can be rewritten as // ii bfFmi ii b ibiibi nn fFRMMMq fFR RfRF iiiiiii iii io io Rr fkqRr Fkq By taking the work effect of all bodies, the total v rtual work can be then gi (31) i ven as i fFm ii bfFm WWW f FRMMMq Recalling that the linear momentum i then th (32) iiii PmRmV , e first term in the left hand side of Equations (30) can be expressed in term of linear momentum as d d i ii bb P mR RR t (33) Introducing the angular momentum of the ith body about the base ibibi i LRmV (34) Using the latter expression (34) and Equation (26), the middle and the last terms in the l tion (30) can be rewritten respectiv eft hand side of Equa- ely, as d d i iibibi i mRRRmR ib LR tib P (35) d d nn iiiiiiii i io io mRkR rqkR rmRq ii i mii LRr Pq ti (36) where miii LRrm . After all, the virtual work i V of the whole system is pre- sented as follows dd d dd d ib m bibii bfF fF m LL PRRP RrPq tt t RM MMq l variations (37) Since the virtua b R , and q are independent we can reach the well known va linear and angular momentum equations, respectively, as riation of d d P f F t (38) Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. 272 dd dd ib m ibi i fFm LL RP RrP tt MMM (39) According to Equations (38) and (39), there are corc ab v three nditions that the moments of foesout theirtual axis of rotation to vanish, that is d0 P (40) dt d0 d ib ib LVP t (41) d0 d mii LRr P t Note that Equation (40) is guaranteed automatically by th (42) e law of conservation of linear momentum. To ensure the validity of (41) there are two requirements must be met, first 0 c t m ib ib VP VV (44) which requires that (43) 0 iiii ct Rr PqRrVmq ib V and c V are parallel, Rr ii and are parallel, where the velo of mss of the robotic system sec that c V a c is . The Vcity of center ond requirement is 0 F M , that is the projection of dib L onto the direction is conserved, then 1 ddˆ0 ib ib LLl (45) dd tt where is a unit vector along the vir tion 1 ˆ l tual axis of rota- Z . From (45) it follows that 1 ˆconst ib Ll con cteed by (46) While the third dition an be guaran m M q , that is the projection 2 ddˆ0 dd mm LqLlq tt (47) Similarly, it follows from (47) that m, (24), (26) and (28) are satisfied. for conservation of molds. From geometrical view point, if the ith-body’s relative respect to the base satellite is parallel to the linear veloc- ity f the relative linear velocity between the ith-body parallel to the linear velocity of the system center of m otion in base satellite or the manipulator or bo 2 ˆconst m Ll (48) Theorem 1: A totally free-flying space robot defined by d’Almberts-Lagrange dynamics (5) is said to be non- holonic system if conditions (23) According to the previous analysis, when external ces exert no moment around the axis of rotation, the omentum h linear velocity with of the system center of mass, and i ’s centroid and its joint are ass, and if the projections of angular momentum is along their corresponding angular displacements, then the system poses a nonholonomic constraints. In other words, any m th will cause the system to adjust its motion to keep the direction of base linear velocity, and the projections of the angular momentum parallel to the virtual axis of rotation. It also embodies that the momentum is trans- ferred from/to the manipulator to/from the base to main- tain the momentum constant. 3.2. Free-Flying Space Robot Interacting with a Target Satellite We assume now that the space robot established a con- tact with a target satellite. It is desired to find out the conditions to keep the momentum conserved. A similar analysis to part A above is followed. Applying the principle of virtual work by d’Almberts- 1 0 0 n ii iii i mRfF R (49) nd from (6) the virtual disaplacement of the target is given as TT EE T Rr n ib i RR R b iiii io kRrq (50) Substituting (50) and (29) into (49) yields into . ii iiibi ib io n fk RrqFRF R n mRR mRRmR i i biiibiiiiii io kR r q TT T TEETT Ti n iiiiiTTiTTTEE io TTTT TEE mR RmR rf FkRrqfrf R FrF R (51) vir- tual work as b iib R fR The last line in (51) can be expressed in terms of f TFTTrTTTTT TTTTTEE WWWfrf R FrFR EE (52) Rewriting the terms TTTTEE mR R and TT T mR in (51), respectively, as d d T TT TT P mR rr t (53) TTTT EETT EETT mRRR mR / d d TE ETEE TT LRP t (54) Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. Copyright © 2011 SciRes. ICA 273 Condition (56) implies that where TEE LTEETT RmV. After all, the virtual work of the whole system is p sented as follows T Pconst , that is re- const T V (58) / d d d d ib bib ii L PRRRr t d d d d dd m TEE TTTEET bfFm TT TfTFT L P Pq t t L PrRP tt fFRMMMq fFr MM T Meanwhile, conditions (57) implies (55) rding to Equation (), there are five conditions th of these conditions are similar to the conditions (40)-(42), in addition to 3 ˆconst TEE Ll (59) And TEETTEET T RPvm Acco 55 at the moments of forces about the virtual axis of rota- tion to vanish. Three d0 d T P t (56) d0 d TEE TEE T LRP t (57) V (60) Theorem 2: A combined free-flying space robot in- teracting with a target satellite defined by d’Almberts- Lagrange dynamics (3.29) is said to nonholonmic system if conditions (3.23), (3.24), (3.26), (3.28) and (3.38)- (3.40) are satisfied. Then, in addition to the conditions concluded in the case of free-flying space robot, it is concluded also that to hold a constant momentum: 1) the target linear veloc- ity should not change; 2) the linear relative velocity be- tween the target and the end-effector should be in the same direction; 3) and its relative angular momentum projection should be kept constant. Figure 2 interprets these conditions. Figure 2. Nonholonomic conditions interpretation of a free-flying space robot interacting with a target satellite.  M. SHIBLI ET AL. 274 4. Nonholonomy Criterion with Zero-Initial Momentum Condition (Non-Drifted System) Holonomic kinematical conditions can be attacked in two approaches. If there are equations betweenvari- ables, we can eliminate of these and reduce the problem to indent variables. Hower, this elimination may be rather cumbersome. Moreover, the conditions between the variables may be of a form that makes distinction between dependent and independent variables artificial. Another approach is to operate with surplus number of variables and retain the given con- straint relations as auxiliary conditions. Nonholonomic conditions necessitate the second way of treatment. A reduction in variables is not possible here because the equations for eliminating some variables as dependent variables do not exist. Thus, we have to operate with more variables than degrees of freedom of the system demand. Establishing criteria that determine whether a me- chanical system is holonomic or nonholonomic is so cru- cial. In case of a mechanical system with linear kine- matic kenimatic-like constraints, a necessary and suffi- cient condition is needed. Using Lie algebra and bilinear covariants is cumber- some and time consuming in the case of complicated system ecess syow to augmented matrix which is necessary to uild the transformation matrix. m c cessar mm pe n ve Nm nde s. In [12-13], another alternative sufficient and ary condition is discussed by proposing a linear n transformation to verify the integrability of holonomic stems. But in the latter approach, it is not clear h nstruct the co b In this work, a transformation matrix is proposed to construct a linear transforation by using the conept of orthogonal projection techniques. This matrix is suffi- cient and ney to verify the integrability of holo- nomic and nonholonomic system. Let us first define a system subjected to linear kinematic (or kienmatic-like) constraints given in the form 0A (61) where the constriant matrix mN A R and the general- ized variables N R . For a system to be holonomic, a complete integrability of all m equations has to be ful- filled. But it might not be possible to find out whether a system of linear constraints are integrable because of unavailability of integrablity techniques or time con- suming. Geometrically, the constraint (61) mean that a point of an N-dimensional space 12 ,, , N R cannot be displaced arbitrarily, but it must move a long a curve that touches at each of its points a hyperplane N m L of di- Nm mension , which contains all displacement vec- tors 12 d ,d,,d N f pe on a s . A system o le if all admissible curve ace li satisfying the constraint Equation (61) Pfaffian equations is completely inte- grabs emanating from any point in the surface of dimension Nm pass- int. However, if the systt in- tegrant in the configuration sn be reacheble displacemd. system subjected tne- e) constraint defined i, these be holonomi can coation matrix ps all v g througin b d For a matic (ktic-lik constraint asaid to nstruct a linear trasform ectors lying h that po le, any poi , although its possi Theorem 3: inema re in em is no pace ca ent is restrice o linear ki n (61) c constraint if we that ma T N m T to zero and maors or- thogrsurface ps all vect onapeal to the h N m L ation ones. sform maintro- duced at each point space to th trix emselv T is of the Proof: ear tran d that define A lin is , N12 ,,R Nm T. Th g in is transformation maectors ps all v lyin persurface to zer ha o and maps all vectorogonal s orth to the N m L onto themselves. Inis transformationl dis- placem maps al othth er words, ent vectors T 12 d,d ,,d N vector as follo satisfying the con- strainws t (61null ) to the T (62) wher e m R and mN TR . Hence (62) a T, fromnd the definition of torma- tion he transf TqA (63) where the matrix mm R and undetermined yet. Vectors orthogonal to N m L , in particular, the m rows i A are mapped by the transformation T onto them- selves as iij A ATAA (64) The condition (64) admits a unique solution of and its elements should not vanish for a system to be holonomic. To find the elements of the matrix , we augment the matrix A , which is assumed to have full rank m, making it into a square matrix A in such a way such that N N A R its determinant does not vanish. The elements ij y of can then be found uniquely and are the elements of first m rows and first m columns of the inverse augmented matrix A . But as it can be seen in [12], it is not clear how to augment the matrix A . In this work, a holonomy scheme is pr con- struatrix oposed to ct thted me augmen A by using the orthogonal projectors. This scheme can used to verify the holonomy of conned systems. From the theory of linear algebra [18], the constrned system defined in (61) is equivalent to the following unconstrained but larger linear system easily be ai strai Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL.275 e de nique ing the Moore-P 0 Aq (65) 0 P where P is an orthogonal projector on the space mN R. The projector P can be found easily by the generalized Pseudoinverse and singular valucompo- sition techs. Usenrose inverse, the solution of (61) is qIAA (66) where N N I R is the identity matrix, the vector is an arbitrary vector, and A is the Penrose inverse de- fined as 1 TT AAAA . Let DIAA . Since (61) is a constrained system, the solution should be qP (67) where P is of NNm dimensio . All the col- umns of the matr are in the null space of n ix D A that is 0AD. Then any nmarly independent co linel- um colum ns of D can be chosen to form P. Now we use the singular value decomposition for D to select the proper such that T DUV ns of P , where U and T V are uy orthogonal matrices of size NNnitar and the diagonal matrixith nonnegative diagonal ele- w , 0,, 0 Nm ments in decreasing order as 12 diag,, , ince T V is an or- thogonal matrix, and . S T ADA UV0, the 0. L e first f AU at th ooking at the structure Nm columns of it can be seen of U are in the null th space o A . T exte hen the first nded augmente Nm d m colu atrix mns of U can be used as the orthogonal projector P. No thwe A can be de- fined as A AP (68) ich is of full rank. By finding the invee of the aug- mented ma wh rs trix A em e inve , then the unique matrix is com- posed of the elents of the first columns of thrse augmentedtrix m rows and first m ma A as: 0 t s ho m ults in a holonomic (integrable) constraint. Note that in the case of linear momentum, the con- straint equation 11 111 12 AA A (69) 11 AA 21 22 1 11 mm AR (7) By hen, the transformation matrix T can be con- structed aA . By this end, a necessary and suffi- cient condition is obtained to verify the integrability of constrained system. If the transformation matrix T is not rank deficient, then the system is integrable. Note that as in (13) the system is subjected a T to non- lonomic (non-integrable) constraint because of con- servation of angular momentu in the absence of exter- nal forces. The physical meaning behind these con- straints is that they restrict the kinematically possible displacements (possible values of the velocities) of the individual parts of the system. On the contrast, the linear momentum res li bbbb bTbT VV VqV Vv near AMMMMM for the angular moentum is given as angular V bb T AMMMMM (71) while m TbbbTb qv (72) 5. Nonholonomy Criterion with Non-Zero Initial Conditions (Drift hing crite non mechanical syste linear kenim is needed. Lie algebra and bilin , he co ues. This m ra ed Systems) Establisria that determine whether a mechanical system is holonomic or holonomic is so crucial. In case of a m withatic-like constraints, a necessary and sufficient condition Usingear covariants is cumber- some and time consuming in the case of complicated systems. In [11,12], another alternative sufficient and necessary condition is discussed by proposing a linear transformation to verify the integrability of holonomic systems. But in the latter approachit is not clear how to construct the augmented matrix which is necessary to build the transformation matrix. In this work, a transformation matrix is proposed to construct a linear transformation by using tncept of orthogonal projection techniqatrix is suffi- cient and necessary to verify the integbility of holo- nomic and nonholonomic system. Let us first define a system subjected to linear kinematic (or kienmatic-like) constraints given in the form A c (73) where the constraint matrix mN A R raint matri represents linear or angular momentum constx, and the gener- alized velocities N R T as v TT bb TTT Vq T , and the vector c repre- e d sents the vector of momentum initial conditions. The constraint (73) can be modified in away such that the time displacement is considered a long with oth r generalized variables as follows: d A ct or (74) d d Act 0 (75) Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. 276 dLet 31 1 N AAcR be define as the modi- fied constraix and the displacement vector 1 d dd N R t . In case of linear momentum is defin- ed nt matri as 1bbbb bTbT VV VqV Vv A MMMMMc (76) while in case of the angular momentum is given as 1VbbbTbT bb Tqv A MMMM Mc (77) In case of a free-flying space robot or losing contact with the target, the constraint matrix is, then, reduced to 1bb VV bb Vq A MM Mc for linear momentum, and 1Vbb bb Tq A MMM c for angula t satellite is From linear algebra point of view, Equation resents a system of linear equations with r mo- mentum where all terms related to the targe set to zero (see [4,9,22] for more details). (73) rep md a-being the vector of unknowns. Since the number of equ tions is less than that of unknowns, it has infinitely man lutions given by y os ddPz (78) for an arbitrary z function of the parameter and the orthogonal projector P is an 11NNm dimensional full rank matrix whose column space is in the null space of , i.e., 3) mean that a point of an 10AP (79) For a system to be holonomic, a complete integrability of all m equations has to be fulfilled. But it might not be possible to find out whether a system of linear con- straints is integrable because of unavailability of inte- grablity techniques or time consuming. Geometrically, the constraint (7 1N-dimensional space 12 1 ,,, , NN R cannot be displaced arbitrarily, but it must move a long a curve that touches at each of its points a hyperplane 1Nm L of dimension 1Nm , which contains all displacement vectors 12 1 d,d, ,d N satisfying the constraint Equation (73) , where 1N represents the variable time t. A system of Pfaf e hat p fian equations is com- oint. pletely integra any point ble if all admissible curves emanating on a surface of dimension from in the space li hed, al its possible displacement is restricted. e con- fo 1Nm passing through t However, if the system is not integrable, any point in the configuration space can be reacthough To construct a linear transformation by using th cept of orthogonal projection techniques, a linear trans- rmation matrix T is defined at each point of the space 12 1 ,,, , NN R , which should maps all vectors lying in 1Nm T to zero and maps all vectors orthoge ansf ed onal to the hypersurfac r this purpose, the tr in such a way that, 1 TA 1Nm onto themselves. n T is decom- L ormatioFo pos the matrix mm R (80) s where of full rank and will be determined later. To obtain uch a transformation, it is required that the m rows i A are mapped by the trans- formation T onto themselves ii as i A ATAA (81) The condition (81) admits a unique solut ion of and var a system holon matrix its elements should not omic. To find the elem nish fo ents of the to be , we augment the matrix A into a square matrix 11NN A R fir in such a way that not vanish. The elements ij y defined in (73) is equival d but larger linear system its determ are the elem tem e e w inant does e of nt [23,24 nts of st m rows and first m columns of the inverse aug- mented matrix. From the theory of linear algebra, the constrained sys- to the following uncon- strain]: 10 d0 A P (82) here the augmented matrix A defined as 1 A AP (83) and P is defined in (78). der to obtain P In or , treating as the vector of unknowns, (25) can be solved using the Moore-Penrose inverse as 11 ddIAA (84) where 11NN I R is the identity matrix, the vector d is an arbitrary vector, ad 1 A is the Moore-Pen- n rose inverse defined as 1 1111 TT AAAA (85) Equation (84) is similar to (78), but not exactly the same, as seen below. Let 11 DIAA . However, D in (84) is not yet P ince they are of different projector P in dimensions. The(78) s is 11NNm, whereas D is an 11NN square matrix. P is of full rank is not. Notice ted dz but Dhat we us in (78) in- stead of dv in (84) is (N + 3 – m). All the columns of the matrix D are in the null space of . The rank of D A , that is, 0AD . Then any 1Nm linearly independent columns of D can be chosen to form P . Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL.277 But it may create discontinuity in dv if different set y independent columns are chosen. To remedy this problem, we compute the singular value decomposi- tion of D to select the proper columns of P of linearl such that T DUV (86) where U and V are orthogonal matrices of size 1Ngonal matrix with non- negative diagonal ts in a decreasing order as T 1, and the ele 12 uu Ndia men 12 1 diag,, ,,0, ,0 Nm (87) Let udenote t 6.ulation Resu 1 (ervation of Mom ested omic . o asrce m e- 3 ,, , N he column vectors of U 12 u1N Uu u (88) Since 0 T ADA UV and the matrix T V is orthogonal, then, 0U.ecause the structure of A B , it follows tt the first 1Nm coh p a ace of lumns of the null s U are in A , i.e., 10,1,2,,1 i Au iN (8 Then the first 1Nm columns of U may be chosen form the orthogonal projector P as 9) 12 1 N m uuu (90) It is obvious that Ps of full rank because U is orthogonal. P i Back to he extended augmented matrix A defined in (83). By finding its inverse, then the unique matrix is composed of the elements of the first m rows and first columns of the inverse augmented matrix m A as: 11 111 111 = 11 A A A A A (91) (92) . If the transformma trix 1 11 m AR m rix T ation By then, the transformation mat can be con- structed as 1 TA . By this end, a necessary and suffi- cient condition is obtained to verify the integrability of constrained system is not raficient, then the syst above caummarized as follows. 4: For a mat t with a these constraints are said to be ho we canruct a linear transfor m nk de n be s rem const e w drift) defi m is integrable. The Theo system subjected to linear kine- ic (kinematic-like) constrainith nonzero initial conditions (momentum ned in (73), lonomic constraint if mation matrix T that aps all vectors lying in 1 N m T to zero and maps all vectors orthogonal to the hypersurface 1 N m L onto themselves. Simlts 6.1. PartConsentum) A 6 DOF free-flying space robot is tto verify its nonholonand holonomic behavior The base satel- lite mass is assumed as 300 kg, and eack of the 6 link mass is taken as 10 kg. Simulation is run to plt the sys- tem momentum responsesuming zeros external fos and zero initial conditions. The Figures 3 and 4 show that linear and angular momentum of a free-flying space robot is conserved and kept zero (range of 10e - 8). These results coply with the concept that for a freflying Fomentumspaigure 3. Angular m of a free-flying ce robot. Figure 4. Linear momentum of a free-flying space robot. Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. 278 d in the absence of an ec of a initial linear velocity. The target satellite igures 7 and 8 show that near and angular momentum of a free-flying space to- the ini- al conditions are assumed 10 m/sec the momentum is space robot its momentum is conserve y external forces. On the other hand, Figures 5 and 6 show respectively non-conservation of linear and angular momentum of a free-flying space robot subjected to an external force. Another simulation is also implemented to chk the conservation of momentumfree-flying space robot interacting with a target satellite as a combined system with nonzero mass is assumed 1500 kg. F li gether with its target is conserved and but since ti hold at values different than zero. Figures 9 and 10 show non-conservation of momentum in case the target satel- Figure 5. Angular momentum of a free-floating space robot in contact with a target satellite. Figure 7. Linear momentum of a free-flying space robot subjected to an external force. F con igure 8. Linear momentum of a free-floating s pace robot in tact with a target satellite. lite is changing and chosen for simulation as 1cost in the x-direction and this agrees with condition (58). Meanwhile, Figures 11 and 12 demonstrates the case when the end-effector moves in a direction not parallel to that of the target chosen 20 m/esc in x and y-direction and 20 m/sec for the base satellite in x-direction only and because it violates condition (60). 6.2. Part 2 (Holonomy Matrix) A 6 DOF free-flying space robot is tested to verify its nonholonomic and holonomic behavior with zero initial linear velocity. The mass of the base satellite is assumed as 300 kg, and the mass of each of the 6 links is taken a 10 kg. The simulation results shows that and by using this algorithm the rank of the transformation matrix s Figure 6. Angular momentum of a free-flying space robot subjected to an external force. T Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL.279 Figure 9. Angular momentum of a free-floating space robo in contact with a target satellite (violation of condition (58))t . Figure 10. Linear momentum of a free-floating space robot in contact with a target satellite (violation of condition (58)). is full (rank = 3) in the case of linear momentum while in the case of angular momentum the rank of the transfor- mation matrix is not full rank (rank = 2) as shown in Table 1. Thessults comply with the theoretical and physical resuother simulation was run assuming external forces exposed to the space robot hand. It shows that the transformtion matrix is of full rank (rank = 3) in both cases of linear and angular momentum. A 6 DOF free-flying space robot is tested to verify its nonholonomic and holonomic behavior with zero initial linear velocity. The mass of the base satellite is assumed as 300 kg, and the mass of each of the 6 links is taken as 10 kg. The initial momentum conditions are assumed as [10 0 0] for both linear and angular monetum. The simu- T e re lts. An aT igure 11. Angular momentum Fof a free-float ing spac e robot in contact with a target satellite (violation of condition (60)). Figure 12. Linear momentum of a free-floating space robot in contact with a target satellite (violation of condition (60)). lation results shows that and by using this algorithm the rank of the transformation matrix is full (rank = 3) in the case of linear momentum while in the case of angular momentum the rank of the transformation matrix Y is not full rank (rank = 2) (see Table 2). These results comply with the theoretical and physical results. Another simula- tion was run assuming external forces exposed to the space robot end-effector. It shows that the transformation matrix Y is of full rank (rank = 3) in both cases of linear and angular momentum. This approach is also implemented to check the holonomy of a space robot interacting with a target satel- lite as a combined system with nonzero initial linear ve locity 20 m/sec for both the base satellite and the target - Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. Copyright © 2011 SciRes. ICA 280 form Case Y matrix Rank Table 1. Rank of the transation matrix Y (sample). Angular momentum of a free-flying space robot with no external forces [0.0000 0.0000 0.0000 0.0000 0.0011 0.0005 0.0000 −0.0025 −0.0011] 2 Angular momentum of a free-flying space robot with external forces (10 N) [−0.0001 0.0008 0.0003 −0.0002 0.0027 0.0012 0.0004 −0.0062 −0.0026] 3 Linear momentum of a free-flying space robot with no external forces [0.0018 0.000 0.0000 0.000 0.0018 0.0000 0.000 0.0000 0.0018] 3 Linear momentum of a free-flying space robot with external forces (10 N) [0.0018 0.0000 0.0000 0.0000 0.0018 0.0000 0.0000 0.0000 0.0018] 3 Angular momentum of a free-flying space robot interacting with a target satellite 1.0e−004* [0.0002 0.0002 0.0000 −0.0002 −0.0002 0.0000 0.3262 0.3268 0.0000] 2 linear momentum of a free-flying space robot interacting with a target satellite 1.0e−005* [0.2350 0.1770 −0.0032 0.1770 0.1407 −0.0023 −0.0032 −0.0023 0.0049] 3 Table 2. Rank of the nonholonomy matrix Y (sample). Case Y matrix Rank Angular momentum of a free-flying space 0 −0. robot with no external forces [0.0000 −0.001 0004 0.0000 0.0026 0.0014 0.0000 −0.0060 −0.0026] 2 Angular momentum of a free-flying space 1.0e−005* [0.0961 0 robot with external forces (100 N) .395 −0.0 o17 0. 0.0 −0.0 6 −0.4895 −0.5410 0.0128 0.4714 0.5565 −0.3819 −0.1089] 3 Linear momentum of a free-flying space robot with no external forces [0.0060 0.0000 Linear momentumf a free-flying space robot with external forces (100 N) [0.0022 0.00 Angular momentum of a free-flying space robot interacting with a target satellite 1.0e−004* [−0.0000 − linear momentum of a free-flying space robot interacting with a target satellite [0.7471 0.5827 000 0.0000 0.0062 −0.0000−0.0000 −0.0000 0.0061] 3 0016 0.0017 0.0033 0.0018 0.0016 0.0018 0.0025] 3 000 0.0000 0.0001 0.0001 −0.0001 0.1094 0.1104 −0.0001] 2 090 0.5827 0.4621 −0.0070 −0.0090 −0.0070 0.0052] 3 satellite. The simulation shows that the holonomy matrix has full rank in case of the linear momentum, but it is rank-deficient in case of angular momentum. Which agrees with the theoretical approach considered in this approach that both linear and angular momentum are conserved but the linear momentum is holonomic and the angular momentum is nonholonomic. 7. Conclusions From geometrical view point and in case of a totally free-flying space robot, if the linear velocity of the base satellite is parallel to the linear velocity of the system center of mass then it poses a holonomic constraint, and if the projections of angular momentum is along their corresponding angular displacements, then the system poses a nonholonomic constraints. In case of interacting with a un-actuated floating target satellite, another three conditions should be hold to keep the momentum con- stant. They are, the target linear velocity is constant, the relative linear velocity between the robot end-effector and the satellite should be parallel to that of the target satellite, and finally the angular momentum projection hold constant as well. nonholonomic. This approac is useful to verify the non-violation of constraints in real-time application and to switch controllers or correct the situation. 8. References [1] P. C. Hughes, “Spacecraft Attitude Dynamics,” Wiley, New York, 1986. [2] Z. Vafa and S. Dubbowsky, “The Kinematics and Dy- namics of Space Manipulators: The Virtual Manipulator Approach,” International Journal of Robotics Research, Vol. 9, No. 4, 1990, pp. 3-21. doi:10.1177/027836499000900401 along the axis of rotation is For a system subjected to linear kinematic (kine- matic-like) constraints, these constraint are said to be holonomic constraint the rank of the proposed linear transformation matrix is full, otherwise, it is said to be h [3] S. Dubowsky and E. Papadopoulos, “The Kinematic, Dynamics, and Control of Free-Flying and Free-Flaoting Space Robotic Systems,” IEEE Transactions on Robotics and Automation, Vol. 9, No. 5, 1993, pp. 531-543. doi:10.1109/70.258046 [4] S. K. Saha, “A Unified Approach to Space Robot Kine-  M. SHIBLI ET AL.281 matics,” IEEE Transactions on Robotics and Automation, Vol. 12, No. 3, 1996, pp. 401-405. [5] Y. Umetani and K. Yoshida, Control of Space Manipulators with Generalized Jacobian Matrix,” IEEE Transactions on Robotics and Automation, [6] X.- ng, “Nonholono on the G IEEE on, Guangzhou, 30 [ulation of EEE Sou 273. [8] , “No ectional Approach,” Au No. 4, 1991, pp. T. Yoshikawa, “Dynamics Hyb of Robot Manipulators-Descrip and Calculationg Force,” IEEE Journal of 7, pp. 386-392. “Resolved Motion Rate Vol. 5, No. 3, 1989, pp. 303-314. S. Ge, H. Li and Q.-Z. Zhamic Motion Planning of Space Robotics Based rithm with Wavelet Approximation,” enetic Algo- International Conference on Control and Automati May-1 June 2007, pp. 1977-1980. 7] D. R. Isenberg, “Dynamics and Sim Robot in a Gravitational Field,” I a Space theastcon, Huntsville, 3-6 April 2008, pp. 268- Y. Nakamura and R. Mukherjeenholonmic Path Planning of Space Robots via Bi-Dir IEEE Transactions on Robotics and 500-514. tomation, Vol. 7, [9] rid Position/Force Control tion of Hand Constraints n of Joint Drivi Robotics and Automation, Vol. 3, No. 5, 198 doi:10.1109/JRA.1987.1087120 [10 otics: Dynamics and er, B [ing and Control of . A Dynamics of Multi- ectures, Sprip. 277-342. [12 “D Mathemati- tical So d 37, No. 11, 1992, pp. 1746-1757. doi:10.1109/9.173144 ] Y. Xu and T. Kanade, “Space Rob Control,” Kluwer Academic Publishoston, 1993. 11] A. De Luca and G. Oriolo, “Model Nonholonomic Mechanical Systems,” In: Jngeles and A. Kecskemethy, Eds., Kinematics and Body Systems, CISM Courses and L nger-Verlag, Wien, 1995, p Vol. 360, ] Ju I. Neimark annd N. A. Fufaef,ynamics of Non- holonomic Systems,” Vol. 33, Translations of cal Monographs, American Mathema ence, 1972. ciety, Provi- [15] J. G. Wang, R. Mukherji, M. Ficocelli, A. Ogilvie, M. Liu g and Simulation of Robotic System for Servicing Hubble Space Telescope,” IEEE/RSJ Inter- natierence on Intelligent Robots and Ss, Beijing, October 2006, pp. 1026-1031. trol of a Space IEEE Int ation (ICRA), Vol. 2, 2001, pp. 1400-1440. , “Optimal Motion on Null ence on Measur- ing Technology and Mechatronics Automation, Zhangjia- [18] C. Lanczos, “The Variational Principle of Mechanics,” [19] R. Murray and S. Sastry, “Nonholonomic Motion Plan- Sinusoids,” IEEE Transactions on , No. 5, 1993, pp. 700-716. [20] M. nified Modeling Approach of Kinematics, Dynamics, and Control of a Free-Flying Space Robot In- l of Intelligent Control and Automation, Vol. 2, No. 1, 2011, pp. 8-23. g Robot Interacting with a Target Satellite,” PhD Thesis, Modeling of a th a Target Satel- lite,” IEEE Conference on Control Applications, Toronto, [23] A. Ben-Israel and N. E. T Greville, “Generalized Inverses: Springer, New York, 2003. [13] A. M. Lopsec, “Nichthholomome Systeme in Mehrdimen- sionalen Euklidischen Raumen,” Trudy Seminara po Vek- tornomu i Tenzornomu Analizu, Vol. 4, 1937, pp. 302-317. [14] A. M Bloch, M. Reyhanoglu and N. H. McClamroch, “Control and Stabilization of Nonholonomic Dynamic Systems,” IEEE Transactions on Automatic Control, Vol. and C. Rice, “Modelin onal Confystem [16] F. Matsuno and K. Saito, “Attitude Con Robot with Initial Angular Momentum,” tional Conference on Robotics and Automerna- [17] H. T. Shui, J. W. Wang and H. X. Ma Planning for Free-Floating Space Robots Based Space Approach,” International Confer jie, 11-12 April 2009, pp. 845-848. University of Toronto Press, Toronto, 1966. ning: Steering Using Automatic Control, Vol. 38 Shibli, “U teracting with a Target Satellite,” Journa [21] M. Shibli, “Modeling and Control of a Free-FlyinSpace Montreal, 2009. [22] M. Shibli, F. Aghili and C.-Y. Su, “ Free-Flying Space Robot in Contact wi 28-31 August 2005, pp. 559-564. Theory and Application,” 2nd Edition, [24] M. Shibli, C.-Y. Su and F. Aghili, “Online Nonholonomy Criterion of a Free-Flying Space Robot with/without Inter- action with a Target Satellite,” 36th International Sympo- sium on Robotics, IEEE Robotics and Automation, Tokyo, 28 November-1 December, 2005. Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL. 282 Appendix A Derivation of the Linear Velocity of a Target ellite Sat Referring to Figure 1, the position vector of the ith body with respect to the inertial frame can be readily ex- pressed as ibib rrr (A1) Moreover, the relative vector ib R can be expressed in the form ibi b rrr (A2) Now the purpose is to derive the equation of that de- g robot by scribes the linear velocity of the target satellite. From the principles of dynamics and because the target satellite is linked to the base satellite space servicinthe robot end-effector there is a relative linear and angular motion between the target satellite and the space robot. The position of the contact point on the target satellite h respect to the base can witbe described based on (A1) as follows tbtb rrr (A3) Then the velocity of the contact point is determined by taking the time derivative of (A3), which yields dtb r d tb VV t (A4) The last term in (4) is evaluated as follows: ddˆˆ tb tt rxiy j dd ˆˆ dd dd ˆˆ dddd tt tt xy ij ix jy ttt t (A5) ˆˆ dd dd ˆˆ dd dd tt tt xy ij ij xy tt tt The first three terms in the first parenthesis represent the components of velocity of the contact point as meas- ured by an observer attached to the moving base coordi- system. This term will be denoted by v. The othenate tr three terms in the second parenthesis represent the insta- nenous time rate of change of the unit vector ˆˆ , ij and ˆ k and measured in the inertial frame and given as: ˆˆ dd ˆ dd i b jj tt (A6) tt ˆ dd ˆˆ ji bi dd tt (A7) Viewing the axes in three dimension, and noting that ˆ bb k , we can express the derivative (A6) and (A7) in terms of the cross product as ˆ dˆ : db ii t (A8) ˆ dˆ : db jj t (A9) Substituting these results into (A5) and using the dis- tributive property of the vector cross product, one obtains dˆˆ :: tb rvxiyjvr (A10) dtb tt ttb t Since the target satellite is linked with the space robot / t via the end-effector joint and using the Jacobian trans- formation, hence equation (A4) becomes /bEE tb btLt VVr Jqrv EE t (A11) Appendix B Linear and Angular Jacobian Matrices for a 6-DOF Based Satellite Space Robot Interacting with a Target Satellite 1111 ,0,0,0,0,0,0 L Jkrc 2121222 ,, 0, 0,0, 0,0 L Jkrckrc 31312 32333 ,, ,0,0,0,0 L Jkrckrckrc 41 412 423 43444 ,,,,0, L J krckrckrckrc 0,0 51 512 523534 54555 ,, ,,,0,0 L Jk rckrckrckrckrc 61612623634 645 656 66 ,,,,, L Jk rckrckrckrckrckrc ,0 1 1223345566 ,,,,,, t Ltttttttttt J krckrc krckrc krckrckrc Copyright © 2011 SciRes. ICA  M. SHIBLI ET AL.283 11,0,0,0,0,0,0 A Jk 212 ,,0, 0,0, 0,0 A Jkk 3123 ,, ,0,0,0,0 A Jkkk 412 34 ,,,,0,0,0 A Jkkkk 5123 45 ,, ,, ,0,0 A Jkkkkk 6123456 ,,,,,,0 A Jkkkkkk 123456 ,,,,,, t At J kkkkkkk Copyright © 2011 SciRes. ICA |