Y. B. GANDOLE
12
6. Conclusions
Analogy between acoustic media and transmission lines
is reviewed and an analogous electrical model of an ul-
trasonic transducer using controlled sources is discussed.
A Simulation model of a complete ultrasonic system is
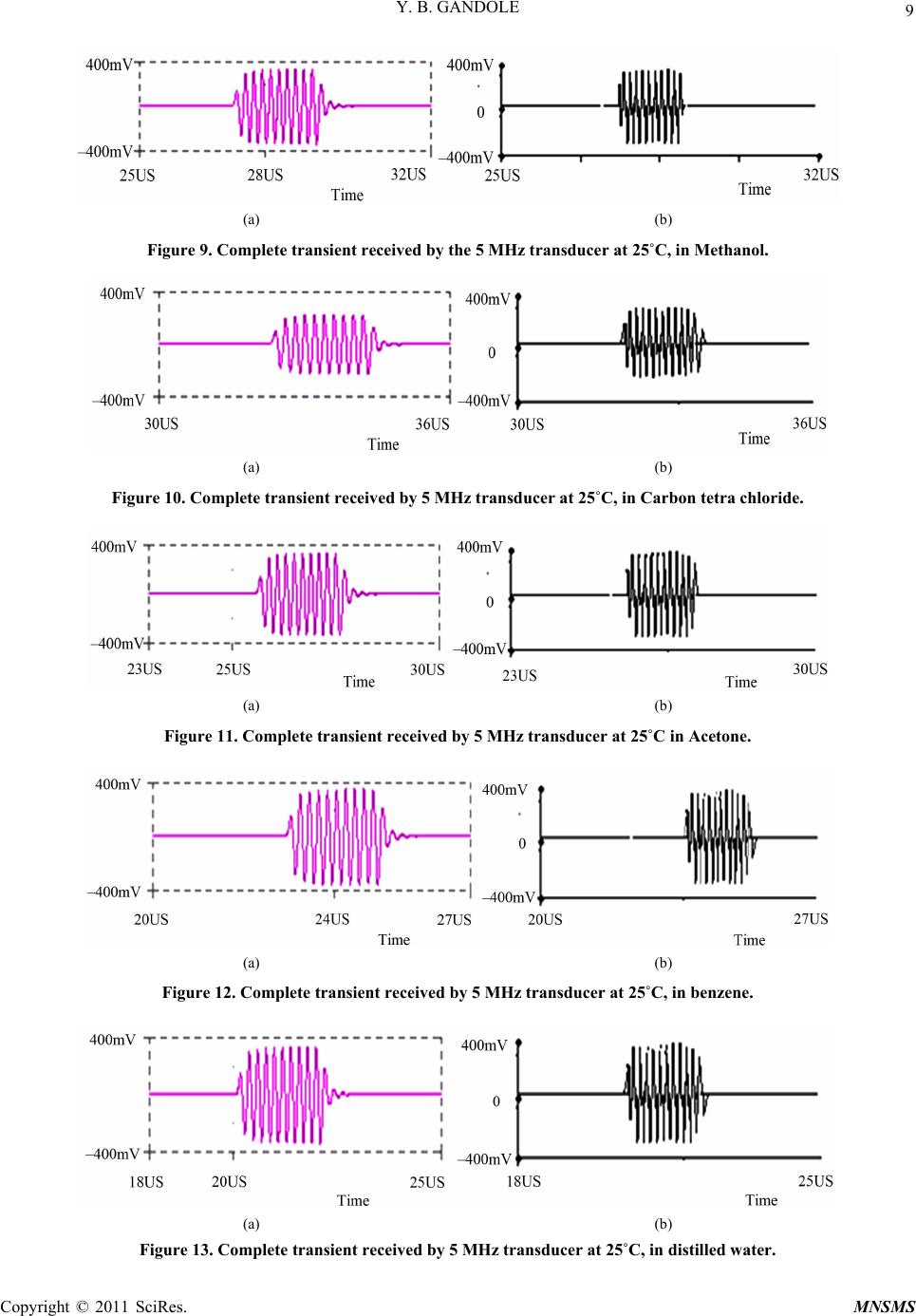
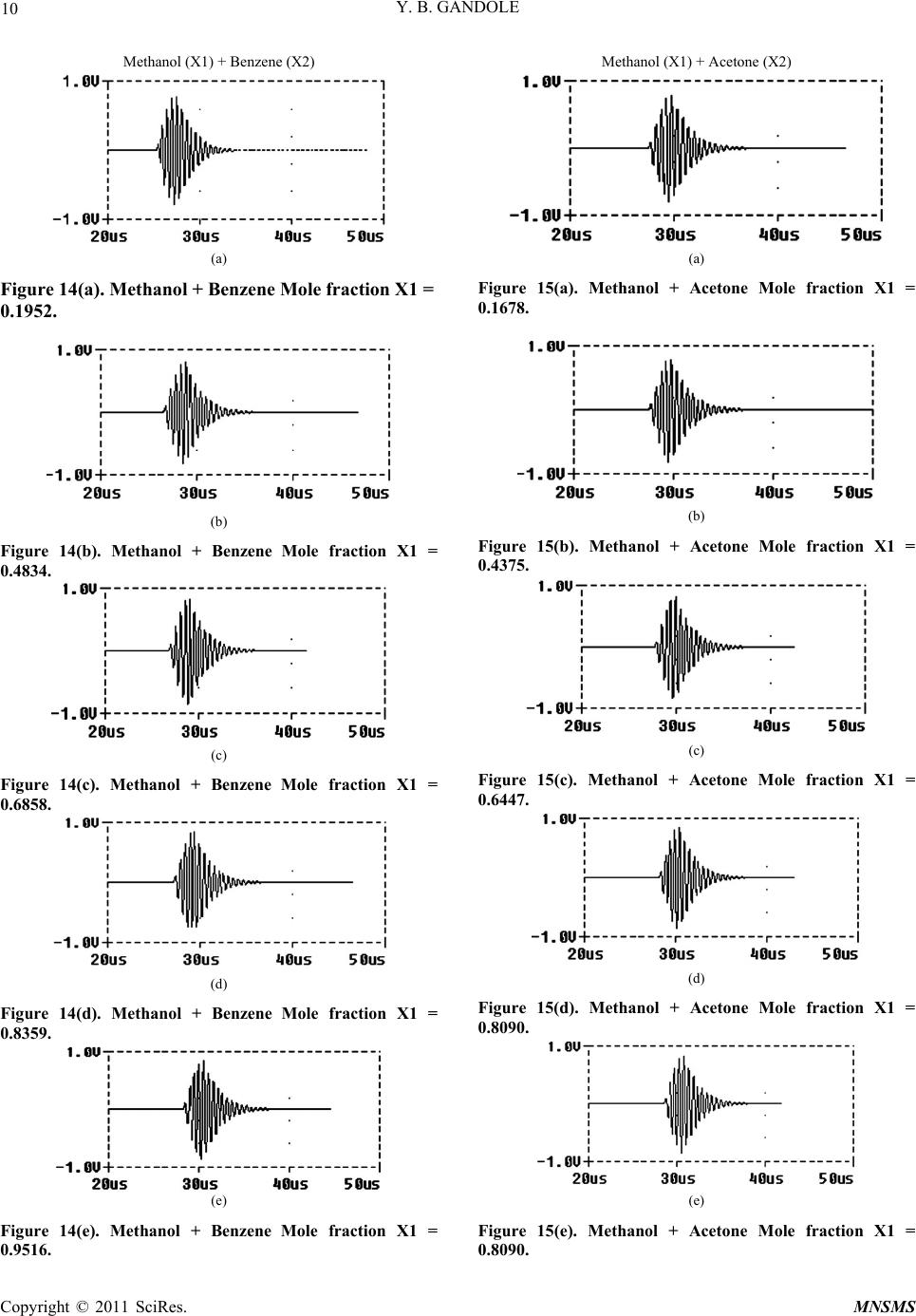
presented. The received signal from the simulation is
compared to that of an actual measurement in the time
domain. The comparison of simulated, experimental data
clearly shows that temperature and frequency dependen-
cies of parameters of relevance to acoustic wave propa-
gation can be modeled. The feasibility has been demon-
strated in an ultrasound transducer setup for material
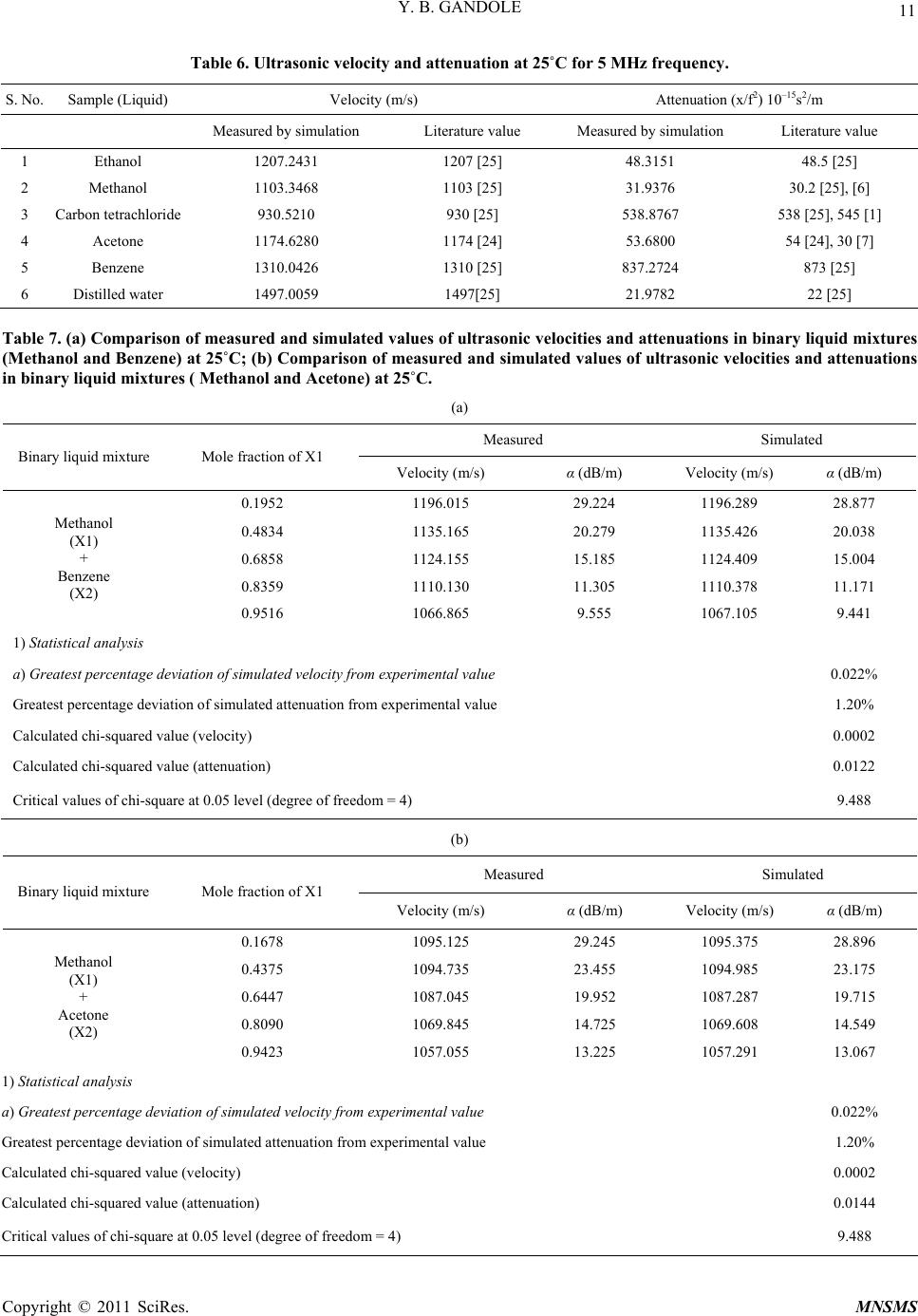
property investigations. Comparisons were made for at-
tenuation and velocity of sound for ethanol, methanol,
carbon tetrachloride, acetone, benzene and distilled water.
For these materials, the agreement is good. The simula-
tion tool therefore provides a way to predict the received
signal before anything is built. Furthermore, the use of an
ultrasonic simulation package allows for the develop-
ment of the associated electronics to amplify and process
the received ultrasonic signals.
7. References
[1] A. A. Berdyev and B. Khemraev, Russian Journal of
Physical Chemistry, Vol. 41, 1976, p. 1490.
[2] A. D. Pierce, “An Introduction to Its Physic Principles
and Applications,” Woodburg, New York, 1989.
[3] A. Puttmer, P. Hauptmann, R. Lucklum, O. Krause and B.
Henning, “SPICE Model for Lossy Piezoceramic Trans-
ducers,” IEEE Transactions on Ultrasonics, Ferroelec-
trics and Frequency Control, Vol. 44, No. 1, 1997, pp.
60-66. doi:10.1109/58.585191
[4] G. Benny, G. Hayward and R. Chapman, “Beam Profile
Measurements and Simulations for Ultrasonic Transduc-
ers Operating in Air,” Journal of the Acoustical Society of
America, Vol. 107, No. 4, 2000, pp. 2089-2100.
doi:10.1121/1.428491
[5] D. Berlincourt, H. A. Krueger and C. Near, “Important
Properties of Morgan Electroceramics,” Morgan Electro-
ceramics, Technical Publication, TP-226, 2001.
[6] D. E. Gray, “American Institute of Physics Handbook,”
3rd Edition, Mc Graw-Hill, New York, 1972.
[7] D. F. Evans, J. Thomas, J. A. Nadas and M. A. Matesich,
Journal of Physics and Chemistry, Vol. 75, No. 11, 1971,
pp. 1714-1722. doi:10.1021/j100906a013
[8] D. K. Cheng, “Field and Wave Electromagnetics,” 2nd
Edition, Addison-Wesley, Reading, 1989.
[9] G. S. Kino, “Acoustic Waves: Devices, Imaging and
Analog Signal Processing,” Prentice-Hall, Englewood
Cliffs, 1988.
[10] L. E. Kinsler, A. R. Frey, A. B. Coppens and J. V. Sand-
ers, “Fundamentals of Acoustics,” 3rd Edition, Wiley,
New York, 1982.
[11] M. Redwood, “Transient Performance of a Piezoelectric-
transducer,” Journal of the Acoustical Society of America,
Vol. 33, 1961, pp. 527-536. doi:10.1121/1.1908709
[12] M. G. S. Ali, “Analysis of Broadband Piezoelectric
Transducers by Discreet Time Model,” Egyptian Journal
of Solids, Vol. 23, 2000, pp. 287-295.
[13] M. Hirsekorn, P. P. Delsanto, N. K. Batra and P. Matic,
“Modellling and Simulation of Acoustic Wave Propagation
in Locally Resonant Sonic Materials,” Ultrasonics, Vol.
42, No. 1-9, 2004, pp. 231-235.
doi:10.1016/j.ultras.2004.01.014
[14] J. Millman and C. Halkias, “Integrated Electronics,”
McHill Ltd., Tokyo, 1972, p. 560.
[15] M. H. Rashid, “SPICE for Circuits and Electronics Using
PSPICE,” 2nd Edition, Printice Hall of India Pvt, Ltd.,
New Delhi, 2002.
[16] R. Krimholtz, D. A. Leedom and G. L. Matthei, “New
Equivalent Circuits for Elementary Piezoelectric Trans-
ducers,” Electronics Letters, Vol. 6, 1970, pp. 398-399.
doi:10.1049/el:19700280
[17] S. A. Morris and C. G. Hutchens, “Implementation of
Mason’s Model on Circuit Analysis Programs,” IEEE
Transactions on Ultrasonics, Ferroelectrics and Fre-
quency Control, Vol. 33, 1986, pp. 295-298.
[18] Y. B. Gandole, S. P. Yawale and S. S. Yawale, “Simpli-
fied Instrumentation for Ultrasonic Measurements,” Elec-
tronic Technical Acoustics, Vol. 35, 2005.
[19] J. L. San Emeterio, A. Ramos, P. T. sanz, A. Ruiz and A.
Azbaid, “Modeling NDT Piezoelectric Ultrasonic Trans-
mitter,” Ultrasonics, Vol. 42, No. 1-9, 2004, pp. 277-281.
doi:10.1016/j.ultras.2004.01.021
[20] J. P. Sferruzza, F. Chavrier, A. Birer and D. Cathignol,
“Numerical Simulation of the Electro-Acoustical Re-
sponse of a Transducer Excited by a Time-Varying Elec-
trical Circuit,” IEEE Transactions on Ultrasonics, Ferro-
electrics and Frequency Control, Vol. 49, No. 2, 2002, pp.
177-183.
[21] S. H. Lee, “Shear Viscosity of Benzene, Toluene, and
p-Xylene by Non-Equilibrium Molecular Dynamics
Simulations,” Bulletin of the Korean Chemical Society,
Vol. 25, No. 2, 2004, pp. 321-324.
doi:10.5012/bkcs.2004.25.2.321
[22] W. M. Leach, “Controlled-Source Analogous Circuits
and SPICE Models for Piezoelectric Transducers,” IEEE
Transactions on Ultrasonics, Ferroelectrics and Fre-
quency Control, Vol. 41, 1994, pp. 60-66.
[23] W. P. Mason, “Electromechanical Transducers and Wave
Filters,” Van Nostrand, New York, 1942.
[24] W. Schaaff, “Numerical Data and Functional Relational-
ships in Science and Technology,” In: K. H. Hellwege
and A. M. Hellweg, Eds., New Seris Group II: Atomic
and Molecular Physics, Vol. 5: Molecular Acoustics,
Springer-Verlag, Berlin, 1967.
[25] Weast, C. Robert, “Handbook of Chemistry and Physics,”
45th Edition, Chemical Rubber Co., Cleveland Ohio,
Copyright © 2011 SciRes. MNSMS