Circuits and Systems, 2011, 2, 320-325
doi:10.4236/cs.2011.24044 Published Online October 2011 (http://www.scirp.org/journal/cs)
Copyright © 2011 SciRes. CS
An Efficient Method for Vehicle License Plate Detection in
Complex Scenes
Mahmood Ashoori-Lalimi, Sedigheh Ghofrani*
Electrical Engineering Department, Islamic Az ad University, South Tehran Branch, Tehran, Ira n
E-mail: mahmood_ashoori@yahoo.com, *s_ghofrani@azad.ac.ir
Received April 2, 2011; revised Au gu st 23, 2011; accepted August 30, 2011
Abstract
In this paper, we propose an efficient method for license plate localization in the images with various situa-
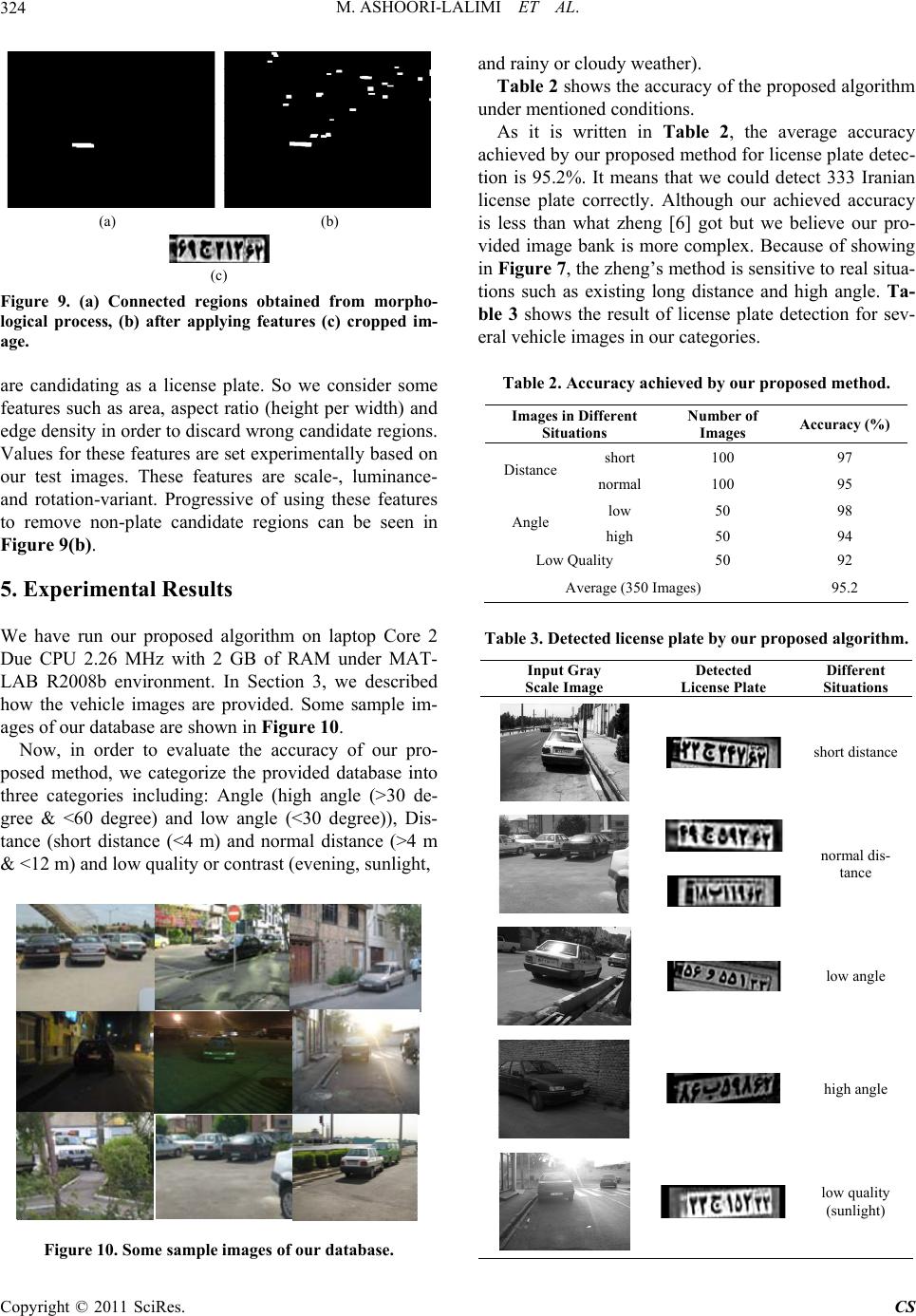
tions and complex background. At the first, in order to reduce problems such as low quality and low contrast
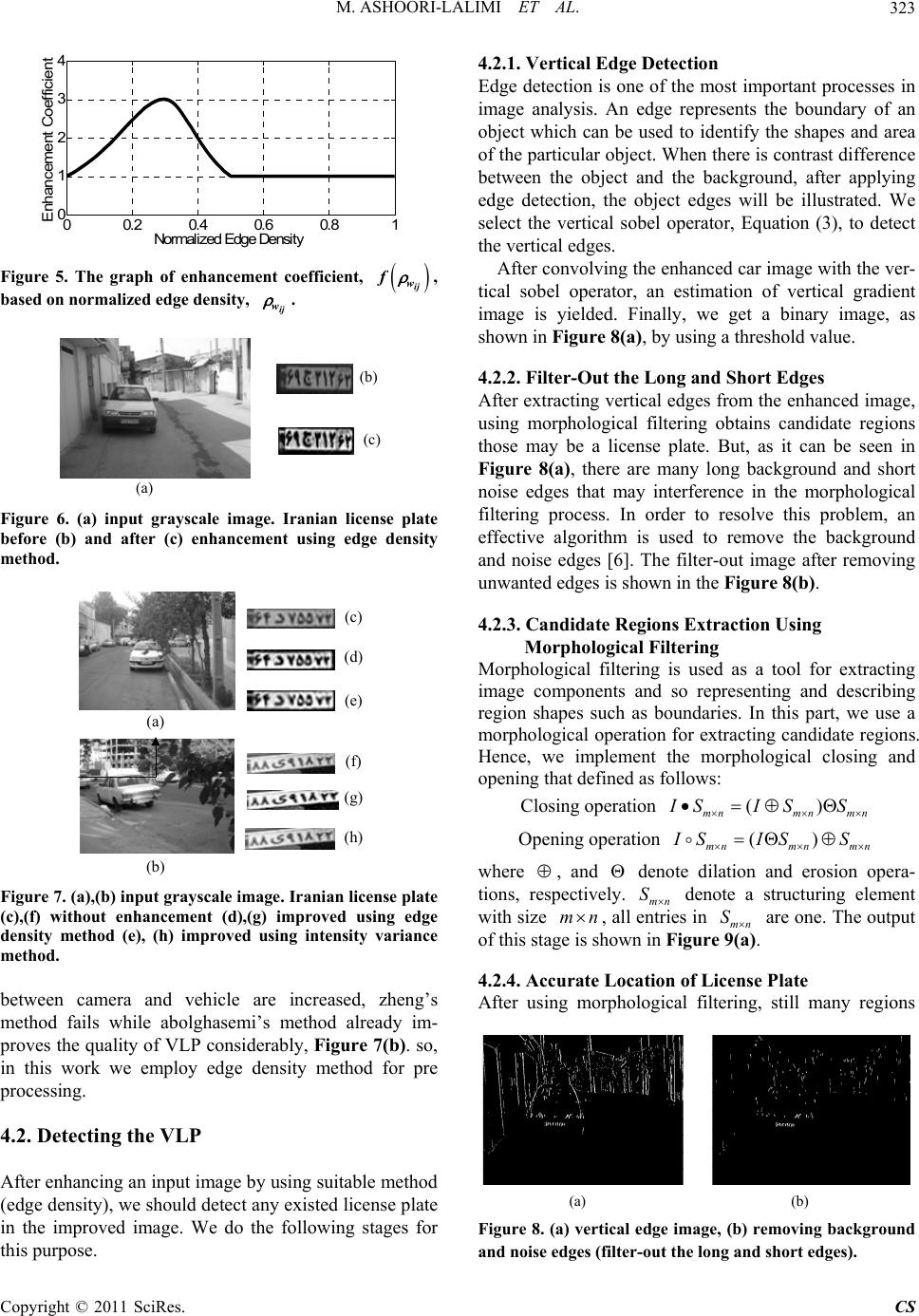
in the vehicle images, image contrast is enhanced by the two different methods and the best for following is
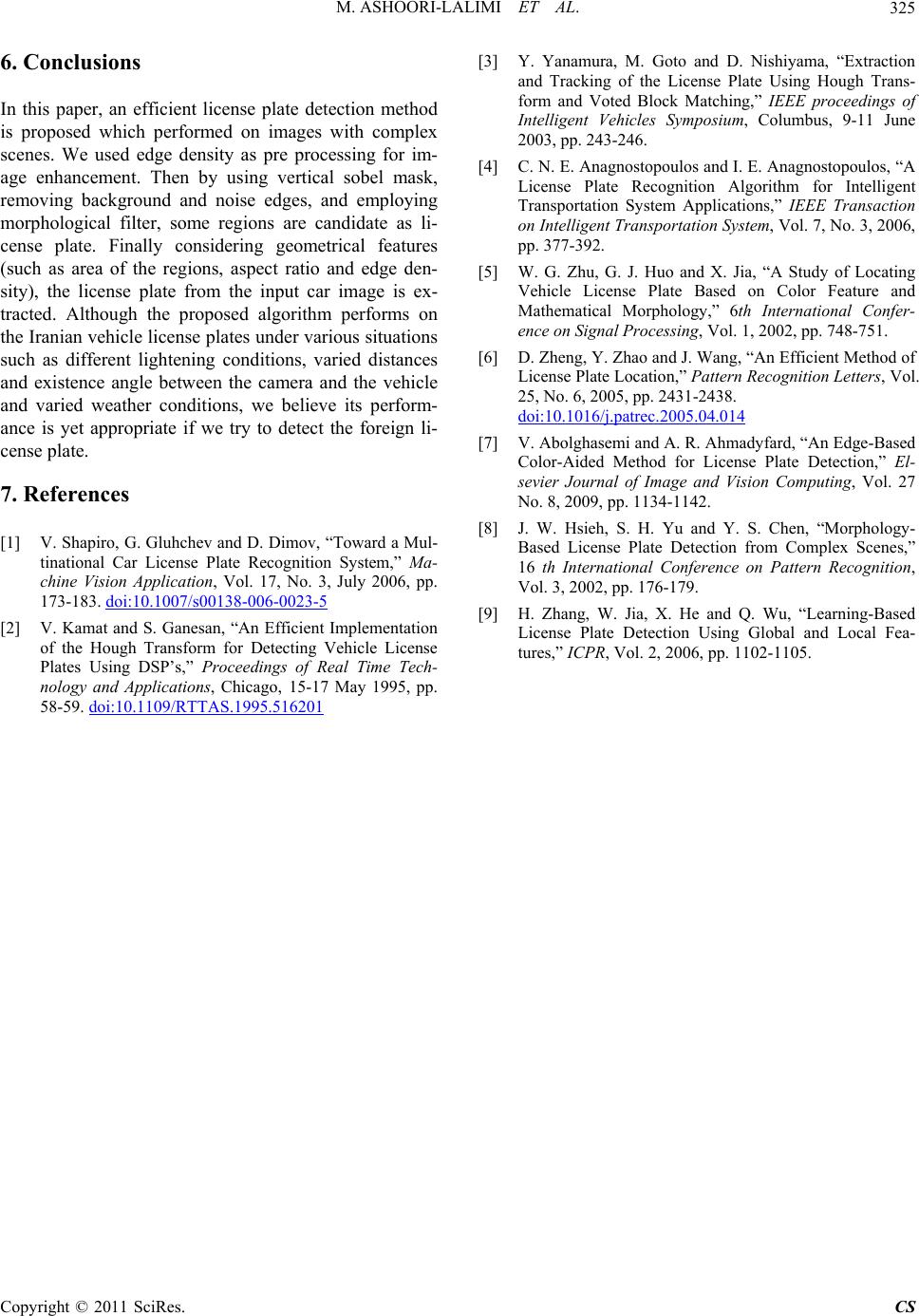
selected. At the second part, vertical edges of the enhanced image are extracted by sobel mask. Then the
most of the noise and background edges are removed by an effective algorithm. The output of this stage is
given to a morphological filtering to extract the candidate regions and finally we use several geometrical
features such as area of the regions, aspect ratio and edge density to eliminate the non-plate regions and
segment the plate from the input car image. This method is performed on some real images that have been
captured at the different imaging conditions. The appropriate experimental results show that our proposed
method is nearly independent to environmental conditions such as lightening, camera angles and camera dis-
tance from the automobile, and license plate rotation.
Keywords: License Plate Detection, Image Enhancement, Background and Noise Removing, Morphological
Operations
1. Introduction
With the rapid development of highway and the wide use
of vehicle, researchers start to pay more attention on ef-
ficient and accurate intelligent transportation systems
(ITS). It is widely used for detecting car’s speed, security
control in restricted areas, highway surveillance and
electric toll collection [1]. Vehicle license plate (VLP)
recognition is one of the most important requirements of
an ITS. Although any ITS and specifically any VLP rec-
ognition contains two part in general, license plate detec-
tion and recognition, detecting and segmenting VLP
correctly is most important because of existing condi-
tions such as poor illumination, vehicle motion, view-
point and distance changes. The problem of automatic
VLP recognition has been studied since 1990s. The first
approach was based on characteristics of boundaries
[2,3]. In this method, an image was binarized and then
processed by certain algorithms, such as Hough trans-
form, to detect lines. In general, the most common ap-
proaches for VLP detection include texture [1,4], color
feature [5], edge extraction [6], combining edge and color
[7], morphological operation [5,8] and learning-based
method [9]. Using color feature is benefit when lighten-
ing is unchanged and stable. However methods based on
edge and texture are nearly invariant to different illumi-
nation and so they are widely used for VLP detection.
These methods use the fact that there are many charac-
ters in the license plate, so the area contains rich edge
and texture information. Zhang et al. [9] proposed learn-
ing-based method using AdaBoost for VLP detection.
They used both global (statistical) and local (Haar-like)
features to detect the license plate.
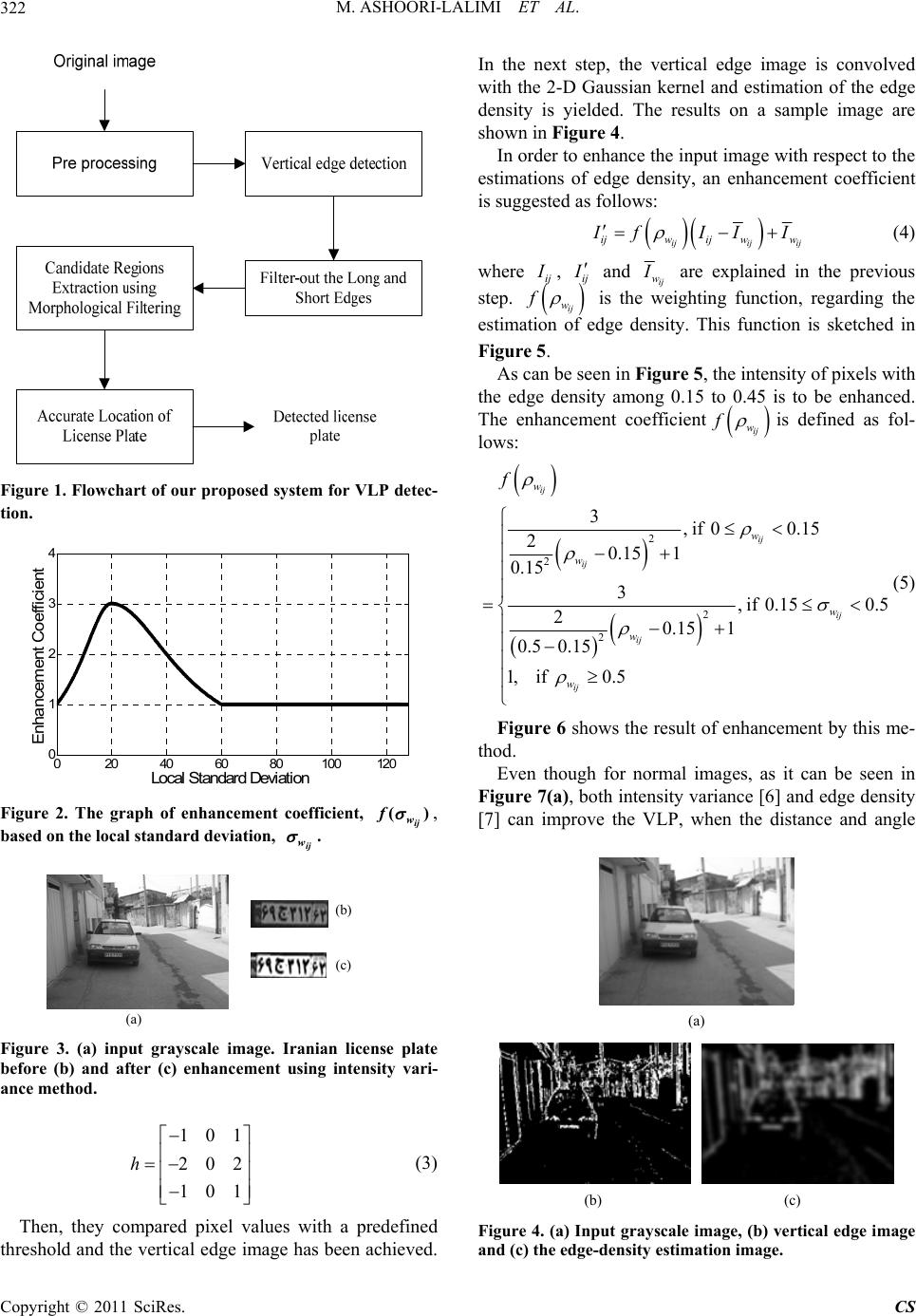
In this paper, we do pre processing for image en-
hancement at first. The some regions are candidate as a
license plate during three procedures. Finally considering
geometrical features, the license plate is segmented
nearly independent of image capturing conditions .
This paper is organized as follows: in Section 2, dif-
ferent styles of Iranian license plates are illustrated in
Section 3. We express how our image bank is provided.
In Section 4, the proposed algorithm is described and in
Section 5 the experimental results are reported. Finally,
in Section 6 we have conclusion.