S. TAFAZOLI ET AL.
Copyright © 2011 SciRes. JGIS
322
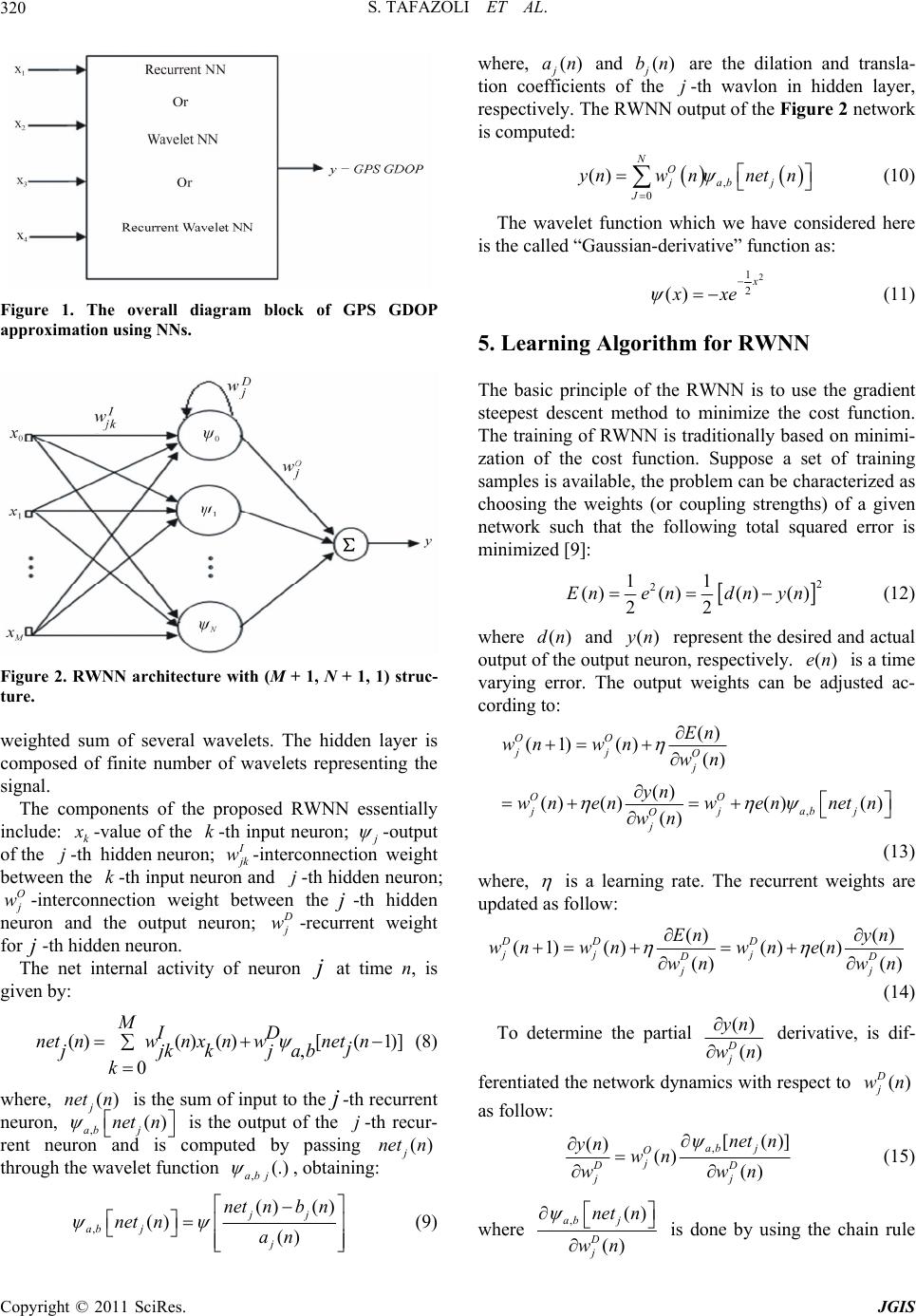
Figure 3. The approximation error values of GPS GDOP
determined based on RWNN for 900 data with (4, 3, 1)
structure.
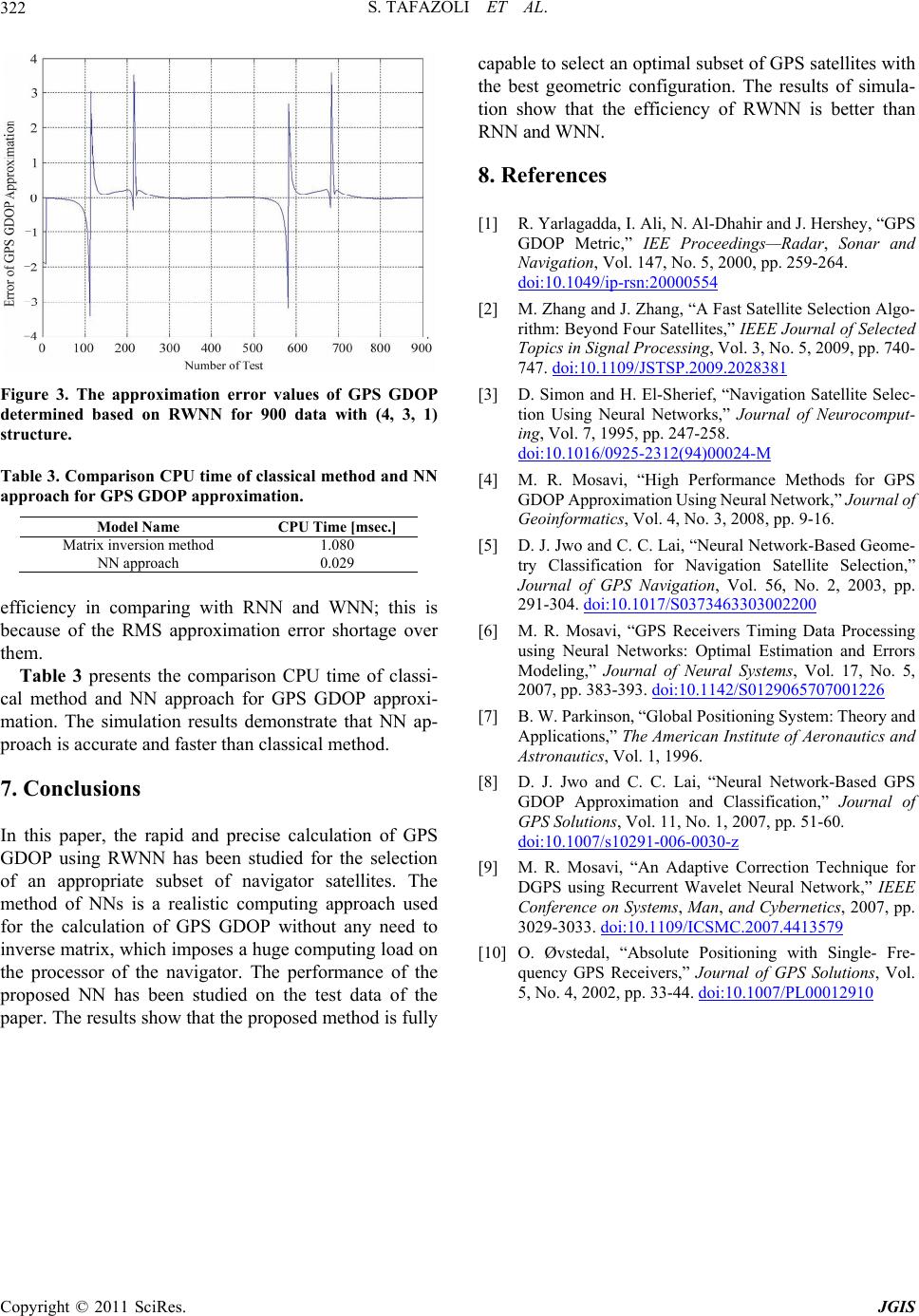
Table 3. Comparison CPU time of classical method and NN
approach for GPS GDOP approximation.
Model Name CPU Time [msec.]
Matrix inversion method 1.080
NN approach 0.029
efficiency in comparing with RNN and WNN; this is
because of the RMS approximation error shortage over
them.
Table 3 presents the comparison CPU time of classi-
cal method and NN approach for GPS GDOP approxi-
mation. The simulation results demonstrate that NN ap-
proach is accurate and faster than classical method.
7. Conclusions
In this paper, the rapid and precise calculation of GPS
GDOP using RWNN has been studied for the selection
of an appropriate subset of navigator satellites. The
method of NNs is a realistic computing approach used
for the calculation of GPS GDOP without any need to
inverse matrix, which imposes a huge computing load on
the processor of the navigator. The performance of the
proposed NN has been studied on the test data of the
paper. The results show that the proposed method is fully
capable to select an optimal subset of GPS satellites with
the best geometric configuration. The results of simula-
tion show that the efficiency of RWNN is better than
RNN and WNN.
8. References
[1] R. Yarlagadda, I. Ali, N. Al-Dhahir and J. Hershey, “GPS
GDOP Metric,” IEE Proceedings—Radar, Sonar and
Navigation, Vol. 147, No. 5, 2000, pp. 259-264.
doi:10.1049/ip-rsn:20000554
[2] M. Zhang and J. Zhang, “A Fast Satellite Selection Algo-
rithm: Beyond Four Satellites,” IEEE Journal of Selected
Topics in Signal Processing, Vol. 3, No. 5, 2009, pp. 740-
747. doi:10.1109/JSTSP.2009.2028381
[3] D. Simon and H. El-Sherief, “Navigation Satellite Selec-
tion Using Neural Networks,” Journal of Neurocomput-
ing, Vol. 7, 1995, pp. 247-258.
doi:10.1016/0925-2312(94)00024-M
[4] M. R. Mosavi, “High Performance Methods for GPS
GDOP Approximation Using Neural Network,” Journal of
Geoinformatics, Vol. 4, No. 3, 2008, pp. 9-16.
[5] D. J. Jwo and C. C. Lai, “Neural Network-Based Geome-
try Classification for Navigation Satellite Selection,”
Journal of GPS Navigation, Vol. 56, No. 2, 2003, pp.
291-304. doi:10.1017/S0373463303002200
[6] M. R. Mosavi, “GPS Receivers Timing Data Processing
using Neural Networks: Optimal Estimation and Errors
Modeling,” Journal of Neural Systems, Vol. 17, No. 5,
2007, pp. 383-393. doi:10.1142/S0129065707001226
[7] B. W. Parkinson, “G lobal Positioning S ystem: Th eory and
Applications,” The American Institute of Aeronautics and
Astronautics, Vol. 1, 1996.
[8] D. J. Jwo and C. C. Lai, “Neural Network-Based GPS
GDOP Approximation and Classification,” Journal of
GPS Solutions, Vol. 11, No. 1, 2007, pp. 51-60.
doi:10.1007/s10291-006-0030-z
[9] M. R. Mosavi, “An Adaptive Correction Technique for
DGPS using Recurrent Wavelet Neural Network,” IEEE
Conference on Systems, Man, and Cybernetics, 2007, pp.
3029-3033. doi:10.1109/ICSMC.2007.4413579
[10] O. Øvstedal, “Absolute Positioning with Single- Fre-
quency GPS Receivers,” Journal of GPS Solutions, Vol.
5, No. 4, 2002, pp. 33-44. doi:10.1007/PL00012910