Intelligent Control and Automation
Vol. 3 No. 2 (2012) , Article ID: 19244 , 12 pages DOI:10.4236/ica.2012.32020
Efficient Solutions of Coupled Matrix and Matrix Differential Equations
Department of Basic Sciences and Humanities, College of Engineering, University of Dammam, Dammam, KSA
Email: zeyad1968@yahoo.com, zalzhour@ud.edu.sa
Received March 7, 2012; revised April 27, 2012; accepted May 4, 2012
Keywords: Matrix Products; Least-Squares Problem; Coupled Matrix and Matrix Differential Equations; Diagonal Extraction Operator
ABSTRACT
In Kronecker products works, matrices are some times regarded as vectors and vectors are some times made in to matrices. To be precise about these reshaping we use the vector and diagonal extraction operators. In the present paper, the results are organized in the following ways. First, we formulate the coupled matrix linear least-squares problem and present the efficient solutions of this problem that arises in multistatic antenna array processing problem. Second, we extend the use of connection between the Hadamard (Kronecker) product and diagonal extraction (vector) operator in order to construct a computationally-efficient solution of non-homogeneous coupled matrix differential equations that useful in various applications. Finally, the analysis indicates that the Kronecker (Khatri-Rao) structure method can achieve good efficient while the Hadamard structure method achieve more efficient when the unknown matrices are diagonal.
1. Introduction
Linear matrix and matrix differential equations show up in various fields including engineering, mathematics, physics, statistics, control, optimization, economic, linear system and linear differential system problems. For instance, the Lyapunov equations  and
and  (where A* is the conjugate transpose of A) are used to analyze of the stability of continuous-time and discrete-time systems, respectively [1]. The generalized Lyapunov equation:
(where A* is the conjugate transpose of A) are used to analyze of the stability of continuous-time and discrete-time systems, respectively [1]. The generalized Lyapunov equation:
 . (1)
. (1)
(where  is the transpose of B) has been used to characterize structured covariance matrices [2]. Most of the existing results, however, are connected with particular systems of such matrix and matrix differential equations.
is the transpose of B) has been used to characterize structured covariance matrices [2]. Most of the existing results, however, are connected with particular systems of such matrix and matrix differential equations.
Coupled matrix and matrix differential equations have also been widely used in stability theory of differential equations, control theory, communication systems, perturbation analysis of linear and non-linear matrix equations and other fields of pure and applied mathematics and also recently in the context of the analysis and numerical simulation of descriptor systems. For instance, the canonical system
 (2)
(2)
With the boundary conditions and  has been used to the solution of optimal control problem with the performance index [3]. In addition, many interesting problems lead to coupled Riccati matrix differential equations [4]:
has been used to the solution of optimal control problem with the performance index [3]. In addition, many interesting problems lead to coupled Riccati matrix differential equations [4]:
 (3)
(3)
and the general class of non-homogeneous coupled matrix differential equations:
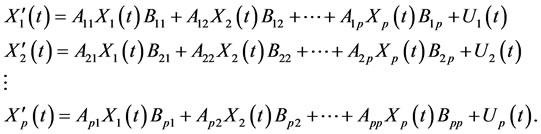 (4)
(4)
where  are given scalar matrices,
are given scalar matrices,  is a given matrix function,
is a given matrix function,  are the unknown diagonal matrix functions to be solved and
are the unknown diagonal matrix functions to be solved and ; and where
; and where  denotes the derivative of matrix function
denotes the derivative of matrix function .
. . (where
. (where  is the set of all
is the set of all  matrices over the complex number field
matrices over the complex number field  and when
and when , we write
, we write  instead of
instead of ).
).
Examples of such situation are singular [5] and hybrid system control [6] and nonzero sum differential games [7]. Depending on the problem considered, different coupling terms may appear. However, in all the above mentioned cases the systems are difficult to solve.
Let us recall some concepts that will be used below.
Given two matrices  and
and 
 , then the Kronecker product of A and B is defined by (e.g. [8-12])
, then the Kronecker product of A and B is defined by (e.g. [8-12])
 . (5)
. (5)
While if ,
,  , and let
, and let  and
and  be the columns of A and B, respectively, namely
be the columns of A and B, respectively, namely
 ,
, .
.
The columns of the Kronecker product  are
are  for all i, j combinations in lexicographic order namely,
for all i, j combinations in lexicographic order namely,
 (6)
(6)
Thus, the Khatri-Rao product of A and B is defined by [13,14]:
 (7)
(7)
consists of a subset of the columns of . Notice that
. Notice that  is of order
is of order  and
and  is of order
is of order . This observation can be expressed in the following form [15]:
. This observation can be expressed in the following form [15]:
 , (8)
, (8)
where the selection matrix  is of order
is of order  and
and
 (9)
(9)
and  is an
is an  column vector with a unity element in the k-th position and zeros elsewhere
column vector with a unity element in the k-th position and zeros elsewhere .
.
Additionally, if both matrices  and
and  have the same size, then the Hadamard product of A and B is defined by [8-11,16]:
have the same size, then the Hadamard product of A and B is defined by [8-11,16]:
 . (10)
. (10)
This product is much simpler than Kronecker and Khatri-Rao products and it can be connected with isomorphic diagonal matrix representations that can have a certain interest in many fields of pure and applied mathematics, for example, Tauber [16] applied the Hadamard product to solving a partial differential equation coming from an air pollution problem. The Hadamard product is clearly commutative, associative, and distributive with respect to addition. It has been known that  is a (principal) submatrix of
is a (principal) submatrix of  if A and B are (square) of the same size. This can be found in Visick [12] and even in Zhang’s book [17]. Liv-Ari [13, Theorem 3.1, p. 128] gave the following new relations related to Kronecker, Khatri-Rao and Hadamard products:
if A and B are (square) of the same size. This can be found in Visick [12] and even in Zhang’s book [17]. Liv-Ari [13, Theorem 3.1, p. 128] gave the following new relations related to Kronecker, Khatri-Rao and Hadamard products:
 ; (11)
; (11)
 . (12)
. (12)
The Kronecker product and vector operator affirming their capability of solving some matrix and matrix differential equations. Such equations can be readily converted into the standard linear equation form by using the well-known identity (e.g. [17,18]):
 , (13)
, (13)
Where  denotes a vectorization by columns of a matrix. The need to compute the
denotes a vectorization by columns of a matrix. The need to compute the ,
,  and
and  are due its appearance in the solutions of coupled matrix differential equations. Here
are due its appearance in the solutions of coupled matrix differential equations. Here
 (14)
(14)
For any matrix , the spectral representation of
, the spectral representation of  and
and  assures that [9,18]:
assures that [9,18]:
 (15)
(15)
where  and
and  are the eigenvalues and the corresponding eigenvectors of A, and
are the eigenvalues and the corresponding eigenvectors of A, and  is the eigenvectors of matrix
is the eigenvectors of matrix .
.
Finally, for any matrices A, B, C,  , we shall make a frequent use the following properties of the Kronecker product (e.g. [9,18-20]) which are used to establish our results.
, we shall make a frequent use the following properties of the Kronecker product (e.g. [9,18-20]) which are used to establish our results.
1)
 (16)
(16)
2) ;
; ;
;
 (17)
(17)
3) ;
;
 (18)
(18)
4) ;
;
 . (19)
. (19)
In this paper, we present the efficient solution of coupled matrix linear least-squares problem and extend the use of diagonal extraction (vector) operator in order to construct a computationally-efficient solution of nonhomogeneous coupled matrix linear differential equations.
2. Coupled Matrix Linear Least-Squares Problem
The multistatic antenna array processing problem can be written in matrix notation as [13]
 . (20)
. (20)
where ,
,  and
and  are given (complex valued) matrices; and where the unknown matrix
are given (complex valued) matrices; and where the unknown matrix  is diagonal. We also assume that n < mp, so that we suggest using a least-squares approach, viz.,
is diagonal. We also assume that n < mp, so that we suggest using a least-squares approach, viz.,
 , (21)
, (21)
where  is called Frobenius norm of A. Using the identity in Equation (13) we can transform (21) into the vector LSP form:
is called Frobenius norm of A. Using the identity in Equation (13) we can transform (21) into the vector LSP form:
 . (22)
. (22)
which has the well-known solution:
 , (23)
, (23)
provided  is invertible.
is invertible.
Applying the direct vector transformation in Equation (13) to  results in a highly inefficient leastsquare problem, because VecX is very sparse. Liv-Ari [13] described an alternative approach based on:
results in a highly inefficient leastsquare problem, because VecX is very sparse. Liv-Ari [13] described an alternative approach based on:
 , X is diagonal (24)
, X is diagonal (24)
which involves the so-called Khatri-Rao product , as well as the diagonal extraction operator
, as well as the diagonal extraction operator :
:
 (25)
(25)
which forms a column vector consisting of the diagonal elements of the  square matrix X, instead of the much longer column vector VecX. In addition, if Y is any matrix of order
square matrix X, instead of the much longer column vector VecX. In addition, if Y is any matrix of order , then
, then
 . (26)
. (26)
As we have observed earlier, when the unknown matrix X is diagonal, solving for VecX is highly inefficient, since most of the elements of X vanish. Instead Liv-Ari [13] used the more compact vectorization identity to rewrite matrix LSP (21) in the vector form:
 . (27)
. (27)
Notice that  consists of only the nontrivial (i.e., diagonal) elements of the matrix X. The explicit solution of (27) is
consists of only the nontrivial (i.e., diagonal) elements of the matrix X. The explicit solution of (27) is
 . (28)
. (28)
provided  is invertible.
is invertible.
It turns out that this expression can also be implemented using Hadamard product, resulting in a significant reduction in computational cost, as implied the following result [13]:
 , (29)
, (29)
where  and
and .
.
When , we observe that the left-hand side expression in Equation (29) requires
, we observe that the left-hand side expression in Equation (29) requires  multiplications, while forming the equivalent right-hand side expression requires only
multiplications, while forming the equivalent right-hand side expression requires only  multiplications. Thus the latter offers significant computational savings, especially when
multiplications. Thus the latter offers significant computational savings, especially when .
.
Now, using (26) we can rewrite (28) in the more compact form:
 . (30)
. (30)
This expression which requires  (multiply and add) operations is much more efficient than (28), which requires
(multiply and add) operations is much more efficient than (28), which requires  operations. It means that the computational advantage of using the Hadamard product expression is particularly evident when
operations. It means that the computational advantage of using the Hadamard product expression is particularly evident when , which implies that
, which implies that  . In order to be able to use (30) we must ascertain that the matrix
. In order to be able to use (30) we must ascertain that the matrix  is invertible. This will hold, for instance, when both A and B have full column rank.
is invertible. This will hold, for instance, when both A and B have full column rank.
As for the diagonal extraction operator , we observe that for any square
, we observe that for any square  matrix
matrix ,
,
 . (31)
. (31)
If Y is diagonal, then we also have
 , Y is diagonal. (32)
, Y is diagonal. (32)
Moreover, the columns of the  selection matrix
selection matrix  are mutually orthonormal, viz.,
are mutually orthonormal, viz.,
 . (33)
. (33)
Using (32) and (11), we get the fundamental relation between the Hadamard product and diagonal extraction operator  which is given by
which is given by
 , X is diagonal (34)
, X is diagonal (34)
where A, B and X is  diagonal matrix.
diagonal matrix.
Now we will discuss the efficient and more efficient least-squares solutions of coupled matrix linear equations:
 ,
, (35)
(35)
where A, 
 , E,
, E,  are given scalar matrices and X,
are given scalar matrices and X,  are unknown matrices to be solved. We also assume that
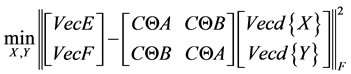
are unknown matrices to be solved. We also assume that , so that the coupled matrix linear Equations (35) is over-determined, which suggests using a least squares approach. We consider the coupled matrix linear least-squares problem (CLSP):
, so that the coupled matrix linear Equations (35) is over-determined, which suggests using a least squares approach. We consider the coupled matrix linear least-squares problem (CLSP):
 . (36)
. (36)
The solution procedure presented here may be considered as a continuation of the method proposed to solve least-squares problem in (21).
Using the identity (13) we can transform (36) into the vector CLSP form [10]:
 (37)
(37)
which has the following solution
 (38)
(38)
One can easily show that
 (39)
(39)
where  is a unitary matrix. So
is a unitary matrix. So
 (40)
(40)
Suppose that  and
and , we then have
, we then have
 (41)
(41)
Now the least—squares solutions (38) can be rewrite into the form:
 . (42)
. (42)
This gives
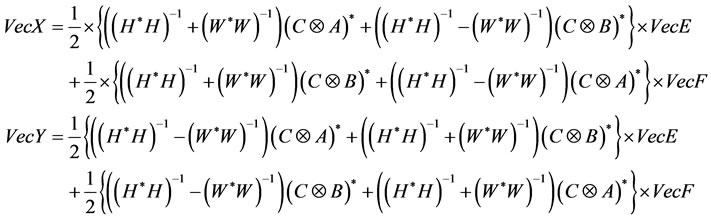 (43)
(43)
where  and
and .
.
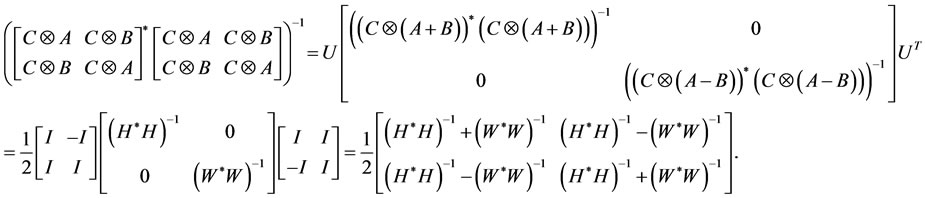
In order to be able to use (38) and (43) we must ascertain that the matrix:
is invertible if and only one

and

are invertible matrices.
As we observed, when the unknown matrices X and  are diagonal, solving for VecX and VecY are highly inefficient, since most of the elements of X and Y vanish. Instead we can use the more compact vectorization identity (24) to rewrite the coupled matrix linear least-squares problem (37) in the reduced-order vector form:
are diagonal, solving for VecX and VecY are highly inefficient, since most of the elements of X and Y vanish. Instead we can use the more compact vectorization identity (24) to rewrite the coupled matrix linear least-squares problem (37) in the reduced-order vector form:
 . (44)
. (44)
Notice that  and
and  consists of only the nontrivial (i.e., diagonal) elements of matrices X and Y. The explicit efficient solution of (44) is
consists of only the nontrivial (i.e., diagonal) elements of matrices X and Y. The explicit efficient solution of (44) is
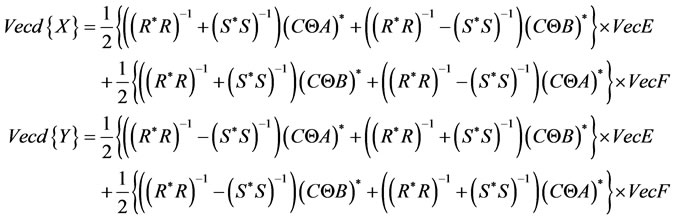 (45)
(45)
where  and
and .
.
In order to be able to use (45), we must ascertain that the matrix

and

are invertible matrices.
It turns out that the expression (45) can also be implemented using Hadamard product by the same technique in the expression (30). Note that the least squares solutions in term of Hadamard product is more efficient than (45) and (43).
3. Non-Homogeneous Matrix Differential Equations
The solution procedure presented here may be considered as a continuation of the method proposed to solve the homogenous coupled matrix differential equations in [18]. We will use our knowledge of the solution of the of simplest homogeneous matrix differential equation:
 ,
, (46)
(46)
where ,
,  are given scalar matrices, and
are given scalar matrices, and  is the unknown matrix function to be solved. In fact the unique solution of (46) is given by:
is the unknown matrix function to be solved. In fact the unique solution of (46) is given by:
 . (47)
. (47)
Theorem 3.1 Let ,
,  are given scalar matrices,
are given scalar matrices,  is a given matrix function and
is a given matrix function and  is the unknown matrix. Then the general solution of the non-homogeneous matrix differential equation:
is the unknown matrix. Then the general solution of the non-homogeneous matrix differential equation:
 ,
, (48)
(48)
is given by
 . (49)
. (49)
Where  is well-definedwhich involves the convolution product of two matrices
is well-definedwhich involves the convolution product of two matrices  and
and .
.
Proof: Suppose that  is the particular solution of (48). The product rule of differentiation gives
is the particular solution of (48). The product rule of differentiation gives
 .
.
Substituting these in (48) we obtain

Thus
 . (50)
. (50)
Multiplying both sides of (50) by  gives
gives
 (51)
(51)
Integrating both sides of (51) between 0 and t gives
 (52)
(52)
Hence, by assumption, we conclude that the particular solution of equation (48) is
 . (53)
. (53)
Now from (47) and (53) we get (49).
Theorem 3.2 Let ,
,  ,
,  are given scalar matrices,
are given scalar matrices,  is a given matrix function and
is a given matrix function and  is unknown diagonal matrix function. Then the general solution of non-homogeneous matrix differential equation
is unknown diagonal matrix function. Then the general solution of non-homogeneous matrix differential equation
 (54)
(54)
is given by
 . (55)
. (55)
Proof: Using the identity (34) we can transform (54) into the vector form:
 (56)
(56)
Now, applying (49), then the unique solution of (56) is

If we put  in Theorem 3.2 we obtain the following result.
in Theorem 3.2 we obtain the following result.
Corollary 3.3 Let A, B,  are given scalar matrices. Then general solution of the homogeneous matrix differential equation:
are given scalar matrices. Then general solution of the homogeneous matrix differential equation:
 (57)
(57)
is given by
 (58)
(58)
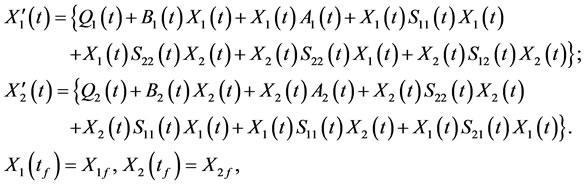
Now we will discuss the general class of non-homogeneous coupled matrix differential equations which defined in (4): By using the  -notation of (4), we have
-notation of (4), we have
 . (59)
. (59)
Let
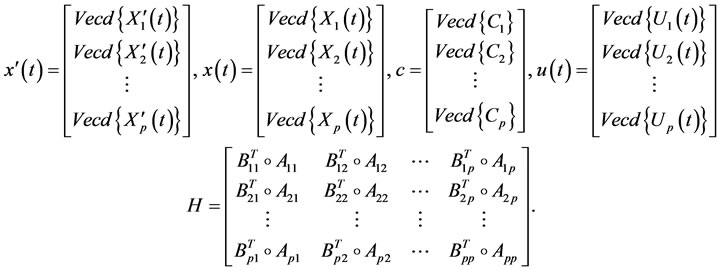 (60)
(60)
Now (59) can be written as

and the general solution is given by:
 . (61)
. (61)
Note that there is many special cases can be considered from the above general class coupled matrix differential equations; now we will discuss some important special cases in the next results.
Theorem 3.4 Let A, B, C, D, E,  are given scalar matrices such that
are given scalar matrices such that
 ;
; 
are given matrix functions and ,
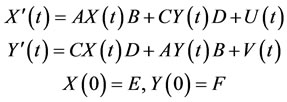
,  are the unknown diagonal matrices. Then the general solution of non-homogeneous coupled matrix differential equations:
are the unknown diagonal matrices. Then the general solution of non-homogeneous coupled matrix differential equations:
 (62)
(62)
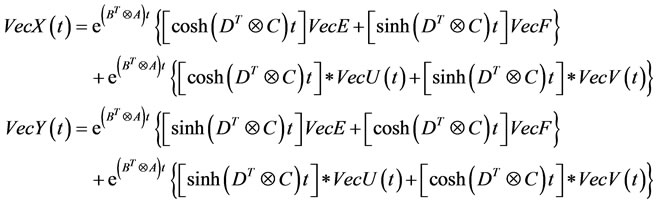
is given by
 (63)
(63)
Proof: Using the identity (34) we can transform (62) into the vector form:
 (64)
(64)
From (61), this system has the following solution:
 . (65)
. (65)
Now we will deal with
 . (66)
. (66)
Since , then we have
, then we have
Then
But
 ;
;
 .
.
So
 (67)
(67)
Due to (67) we have
 ; (68)
; (68)
 . (69)
. (69)
Now substitute (68) and (69) in (65), we get (63).
If we put  in Theorem 3.4 we obtain the following result.
in Theorem 3.4 we obtain the following result.
Corollary 3.5 Let A, B, C, D, E,  are given scalar matrices such that
are given scalar matrices such that
 and
and ,
,  are the unknown diagonal matrices. Then the general solution of homogeneous coupled matrix differential equations:
are the unknown diagonal matrices. Then the general solution of homogeneous coupled matrix differential equations:
 (70)
(70)
is given by
 (71)
(71)
Corollary 3.6 Let ,
,  , E,
, E,  are given scalar matrices and
are given scalar matrices and ,
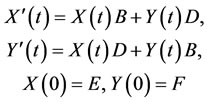
,  are the unknown diagonal matrices. Then the general solution of homogeneous coupled matrix differential equations:
are the unknown diagonal matrices. Then the general solution of homogeneous coupled matrix differential equations:
 (72)
(72)
is given by
 (73)
(73)
Proof: For any matrix , it is easily to show that
, it is easily to show that
 ; (74)
; (74)
 . (75)
. (75)
Now put  in Corollary 3.5 we have
in Corollary 3.5 we have
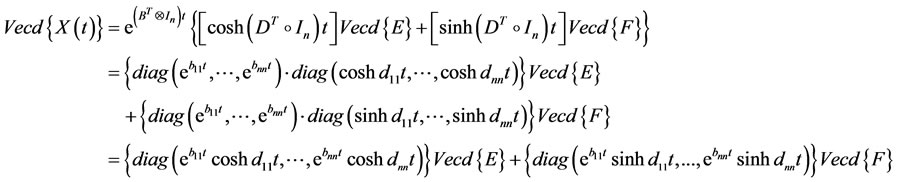
Similarly,
 .
.
While if we applying the fundamental relation between  and Kronecker product defined in (13) and using the same technique in the proof of Theorem 3.4 we obtain (for any matrix
and Kronecker product defined in (13) and using the same technique in the proof of Theorem 3.4 we obtain (for any matrix ) the following result.
) the following result.
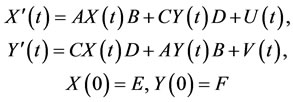
Theorem 3.7 Let A, B, C, D, E,  are given scalar matrices such that
are given scalar matrices such that ,
,  ,
,  ,
,  are given matrix functions and
are given matrix functions and ,
,  are the unknown matrices. Then the general solution of non-homogeneous coupled matrix differential equations:
are the unknown matrices. Then the general solution of non-homogeneous coupled matrix differential equations:
 (76)
(76)
is given by
 (77)
(77)
If we put  and
and  in Theorem 3.7 and using properties (16)-(19) we obtain the following results.
in Theorem 3.7 and using properties (16)-(19) we obtain the following results.
Corollary 3.8 Let B, D, E,  are given scalar matrices such that
are given scalar matrices such that  and
and ,
,  are the unknown matrices. Then the general solution of homogeneous coupled matrix differential equations:
are the unknown matrices. Then the general solution of homogeneous coupled matrix differential equations:
 (78)
(78)
is given by
 (79)
(79)
Corollary 3.9 Let A, C, E,  are given scalar matrices such that
are given scalar matrices such that  and
and ,
,  are the unknown matrices .Then the general solution of homogeneous coupled matrix differential equations:
are the unknown matrices .Then the general solution of homogeneous coupled matrix differential equations:
 (80)
(80)
is given by
 (81)
(81)
4. Concluding Remarks
We have studied an explicit characterization of the mappings

in terms of the selection matrix  as in (11) and (12). We have also observed that the same matrix relates the two operators
as in (11) and (12). We have also observed that the same matrix relates the two operators  and
and  as in (31) and (32). We used the fundamental relation between the Hadamard (Kronecker) product and diagonal extraction (vector) operator in (34) and (13) to derive our main results in Section 2 and 3 and, subsequently, to construct a computationally-efficient solution of coupled matrix least-squares problem and non-homogeneous coupled matrix differential equations. In fact, the Kronecker (Hadamard) product and operator
as in (31) and (32). We used the fundamental relation between the Hadamard (Kronecker) product and diagonal extraction (vector) operator in (34) and (13) to derive our main results in Section 2 and 3 and, subsequently, to construct a computationally-efficient solution of coupled matrix least-squares problem and non-homogeneous coupled matrix differential equations. In fact, the Kronecker (Hadamard) product and operator  (
( ) affirming their capability of solving matrix and matrix differential equations fast (more fast when the unknown matrices are diagonal). To demonstrate the usefulness of applying some properties of the Kronecker products, suppose we have to solve, for example, the following system:
) affirming their capability of solving matrix and matrix differential equations fast (more fast when the unknown matrices are diagonal). To demonstrate the usefulness of applying some properties of the Kronecker products, suppose we have to solve, for example, the following system:
 , (82)
, (82)
where A,  are given scalar matrices and
are given scalar matrices and  is unknown matrix to be solved. Then it is not hard by using the
is unknown matrix to be solved. Then it is not hard by using the  -notation to establish the following equivalence:
-notation to establish the following equivalence:
 , (83)
, (83)
and thus also by using the  -notation product to establish the following equivalence:
-notation product to establish the following equivalence:
 , X is diagonal. (84)
, X is diagonal. (84)
If we ignore the Kronecker (Hadamard) product structure, then we need to solve the following both matrix equations:
• (85)
(85)
Here, Y can be obtained in  arithmetic operations (flops) by using LU factorization of matrix B (Forward Substitution).
arithmetic operations (flops) by using LU factorization of matrix B (Forward Substitution).
• (86)
(86)
Here X can be obtained also in  operations (flops) by using LU factorization of matrix A (Back Substitution).
operations (flops) by using LU factorization of matrix A (Back Substitution).
Now without exploiting the Kronecker product structure, an  system defined in (82) would normally (by Gaussian elimination) require
system defined in (82) would normally (by Gaussian elimination) require  operations to solve. But when we use Kronecker product structure:
operations to solve. But when we use Kronecker product structure: , the calculations shows that
, the calculations shows that  can be obtained only in
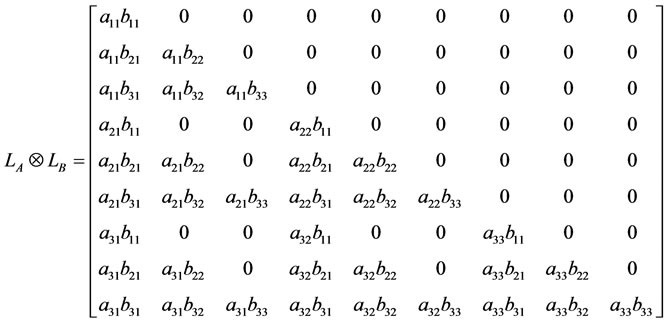
can be obtained only in  operations by using LU factorization of matrices A and B [20, pp. 87]. We can say that the system of the form:
operations by using LU factorization of matrices A and B [20, pp. 87]. We can say that the system of the form:  can be solved fast and the Kronecker structure also a voids the formation of
can be solved fast and the Kronecker structure also a voids the formation of  matrices, only the smaller lower and upper triangular matrices LA, LB, UA, UB are needed. While if X is
matrices, only the smaller lower and upper triangular matrices LA, LB, UA, UB are needed. While if X is  diagonal matrix and use the Hadamard product structure:
diagonal matrix and use the Hadamard product structure: , the calculations shows that
, the calculations shows that  can be obtained only in
can be obtained only in  operations by using LU factorization of
operations by using LU factorization of .
.
We can say that the system of the form:  can be solved more fast than Kronecker structure, only the very smaller lower and upper triangular matrices
can be solved more fast than Kronecker structure, only the very smaller lower and upper triangular matrices  and
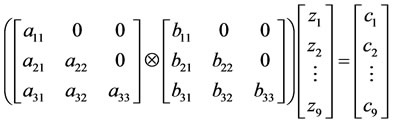
and  are needed. For example, consider A, B are 3 × 3 matrices and C is 9 × 1 vector. To demonstrate the usefulness of applying Kronecker product and
are needed. For example, consider A, B are 3 × 3 matrices and C is 9 × 1 vector. To demonstrate the usefulness of applying Kronecker product and  -notation, we return to the system problem
-notation, we return to the system problem . If
. If  is non-singular and regarding with LU factorizetions of
is non-singular and regarding with LU factorizetions of  and
and , then a solution of system exists and can be written as:
, then a solution of system exists and can be written as:
 . (87)
. (87)
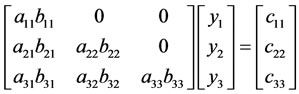
First, the lower triangular system  can be solved by forward substitution as the following:
can be solved by forward substitution as the following:
i.e.,
which can be solved in  operations. The first three equations are:
operations. The first three equations are:
• . (88)
. (88)
• . (89)
. (89)
•
 (90)
(90)
Now the next three equations are:
• . (91)
. (91)
• . (92)
. (92)
•
 . (93)
. (93)
The first boldface expression  in (91) can be computed as
in (91) can be computed as . The second boldface expression
. The second boldface expression  in (92) can be also computed as
in (92) can be also computed as .
.
While the third boldface expression  in (93) can be also computed as
in (93) can be also computed as .
.
We use the previous expressions for obtaining ,
,  and
and  in the first set of equations to simplify the second set of three equations. The simplified second set of equations becomes
in the first set of equations to simplify the second set of three equations. The simplified second set of equations becomes
 . (94)
. (94)
 . (95)
. (95)
 . (96)
. (96)
Solving the second set of equations takes  operations and the forward solve step takes
operations and the forward solve step takes  operations, so obtaining z4, z5 and z6 takes
operations, so obtaining z4, z5 and z6 takes  time. This simplification and using the work from the previous solution step continuous so that solving each of n-sets of n-equations takes
time. This simplification and using the work from the previous solution step continuous so that solving each of n-sets of n-equations takes  time, resulting in an overall solution time of
time, resulting in an overall solution time of . Exploiting the Kronecker structure reduce the usual, expected
. Exploiting the Kronecker structure reduce the usual, expected  time to solve
time to solve  to
to .
.
One final note regarding the exploitation of the Kronecker structure of the system remains. Suppose the matrices A and B are different sizes. Then, the time required to solve the system  is
is , where
, where  is the size of A and
is the size of A and  is the size of B. In our work, the modeler has some choice for the size of the A and B matrices. Thus, a wise choice would make
is the size of B. In our work, the modeler has some choice for the size of the A and B matrices. Thus, a wise choice would make  small, reducing the effect of the
small, reducing the effect of the  term in the
term in the  computation time.
computation time.
While when X is  diagonal matrix and applying
diagonal matrix and applying  -notation, we return to the system problem:
-notation, we return to the system problem: . If
. If  is non-singular matrix and regarding with LU factorizations of
is non-singular matrix and regarding with LU factorizations of 
 , then a solution of system exists and can be written as:
, then a solution of system exists and can be written as:
 . (97)
. (97)
First, the lower triangular system  can be solved by forward substitution as the following:
can be solved by forward substitution as the following:
 which can be solved in
which can be solved in  operations as follows:
operations as follows:
• . (98)
. (98)
• . (99)
. (99)
• . (100)
. (100)
5. Conclusion
The solution of coupled matrix linear least-squares problems and coupled matrix differential equations is studied and some important special cases are discussed. The analysis indicates that solving for  is efficient and solving for
is efficient and solving for  is more efficient when the unknown matrices are diagonal. Although the algorithms are presented for non-homogeneous coupled matrix and matrix linear differential equations, the idea adopted can be easily extended to study coupled matrix nonlinear differential equations, e.g., the coupled matrix Riccati differential equations.
is more efficient when the unknown matrices are diagonal. Although the algorithms are presented for non-homogeneous coupled matrix and matrix linear differential equations, the idea adopted can be easily extended to study coupled matrix nonlinear differential equations, e.g., the coupled matrix Riccati differential equations.
6. Acknowledgements
The author expresses his sincere thanks to referee (s) for careful reading of the manuscript and several helpful suggestions. The author also gratefully acknowledges that this research was partially supported by Deanship of Scientific Research/University of Dammam/Kingdom of Saudi Arabia/under the Grant No. 2012152.
REFERENCES
- T. Kailath, “Linear Systems,” Prentice-Hall, Englewood Cliffs, 1980.
- T. Kailath and A. H. Sayed, “Displacement Structure: Theory and Applications,” SIAM Review, Vol. 37, No. 3, 1995, pp. 297-386. doi:10.1137/1037082
- G. Mouroutsos and P. D. Sparis, “Taylor Series Approach to System Identification, Analysis and Optimal Control,” Journal of the Franklin Institute, Vol. 319, No. 3, pp. 359-371. doi:10.1016/0016-0032(85)90056-0
- L. Jódar and H. Abou-Kandil, “Kronecker Products and Coupled Matrix Riccati Differential Systems,” Linear Algebra and its Applications, Vol. 121, 1989, pp. 39-51. doi:10.1016/0024-3795(89)90690-3
- S. Campbell, “Singular Systems of Differential Equations II,” Pitman, London, 1982.
- M. Mariton, “Les Systèmes Linéaires á Sauts Markoviens,” Thèse d’Etat, Université Paris-Sud, 1986.
- J. B. Cruz and C. I. Chen, “Series Nash Solution of TwoPerson Nonzero Sum Linear Differential Games,” Journal of Optimization Theory and Applications, Vol. 7, No. 4, 1971, pp. 240-257. doi:10.1007/BF00928706
- Z. Al-Zhour and A. Kilicman, “Matrix Equalities and Inequalities involving Khatri-Rao and Tracy-Singh Sums,” Journal of Inequalities in Pure & Applied Mathematics, Vol. 7, No. 1, 2006, pp. 496-513.
- A. Graham, “Kronecker Products and Matrix Calculus with Applications,” Ellis Horwood Ltd., New York, 1981.
- A. Kilicman and Z. Al-Zhour, “Vector Least-Squares Solutions of Coupled Singular Matrix Equations,” Journal of Computational and Applied Mathematics, Vol. 206, No. 2, 2007, pp. 1051-1069. doi:10.1016/j.cam.2006.09.009
- W.-H. Steeb, “Matrix Calculus and Kronecker Product with Applications and C++ Programs,” World Scientific Publishing Co. Pte. Ltd., Singapore, 1997.
- G. Visick, “A quantitative Version of the Observation that the Hadamard Product is A principle Submatrix of the Kronecker Product,” Linear Algebra and its Applications, Vol. 304, No. 1-3, 2000, pp. 45-68. doi:10.1016/S0024-3795(99)00187-1
- H. Lev-Ari, “Efficient Solution of Linear Matrix Equations with Application to Multistatic Antenna Array Processing,” Communications in Information & Systems, Vol. 5, No. 1, 2005, pp. 123-130.
- C. R. Rao and M. B. Rao, “Matrix Algebra and its Applications to Statistics and Econometrics,” World Scientific Publishing Co. Pte. Ltd., Singapore, 1998.
- F. Ding and T. Chen, “Iterative least-Squares Solutions of Coupled Sylvester Matrix Equations,” Systems & Control Letters, Vol. 54, No. 2, 2005, pp. 95-107. doi:10.1016/j.sysconle.2004.06.008
- S. Tauber, “An Applications of the Hadamard Product to Air Pollution,” Applied Mathematics and Computation, Vol. 4, No. 2, 1978, pp. 167-176. doi:10.1016/0096-3003(78)90020-6
- F. Zhang, Matrix Theory: Basic Results and Techniques, Springer-Verlag, New York, 1999.
- A. Kilicman and Z. Al-Zhour, “The General Common Exact Solutions of Coupled Linear Matrix and Matrix Differential Equations,” Journal of Computational Analysis and Applications, Vol. 1, No. 1, 2005, pp. 15-29.
- J. R. Magnus and H. Neudecker, “Matrix Differential Calculus with Applications in Statistics and Econometrics,” John Wiley and Sons Ltd., New York, 1999.
- G. F. Van Loan, “The Ubiquitous Kronecker Product,” Journal of Computational and Applied Mathematics, Vol. 123, No. 1-2, 2000, pp. 85-100. doi:10.1016/S0377-0427(00)00393-9