Intelligent Control and Automation
Vol. 3 No. 1 (2012) , Article ID: 17575 , 12 pages DOI:10.4236/ica.2012.31008
 Control of Uncertain Fuzzy Networked Control Systems with State Quantization
Control of Uncertain Fuzzy Networked Control Systems with State Quantization
Systems Engineering Department, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia
Email: msmahmoud@kfupm.edu.sa
Received September 11, 2011; revised October 11, 2011; accepted October 18, 2011
Keywords: Networked  Control; Fuzzy Systems; Discrete Time-Varying Delay; Linear Matrix Inequality (LMI)
Control; Fuzzy Systems; Discrete Time-Varying Delay; Linear Matrix Inequality (LMI)
ABSTRACT
The problem of robust  control for uncertain discrete-time Takagi and Sugeno (T-S) fuzzy networked control systems (NCSs) is investigated in this paper subject to state quantization. By taking into consideration network induced delays and packet dropouts, an improved model of network-based control is developed. A less conservative delay-dependent stability condition for the closed NCSs is derived by employing a fuzzy Lyapunov-Krasovskii functional. Robust
control for uncertain discrete-time Takagi and Sugeno (T-S) fuzzy networked control systems (NCSs) is investigated in this paper subject to state quantization. By taking into consideration network induced delays and packet dropouts, an improved model of network-based control is developed. A less conservative delay-dependent stability condition for the closed NCSs is derived by employing a fuzzy Lyapunov-Krasovskii functional. Robust  fuzzy controller is constructed that guarantee asymptotic stabilization of the NCSs and expressed in LMIbased conditions. A numerical example illustrates the effectiveness of the developed technique.
fuzzy controller is constructed that guarantee asymptotic stabilization of the NCSs and expressed in LMIbased conditions. A numerical example illustrates the effectiveness of the developed technique.
1. Introduction
Fuzzy system models have been widely adopted to represent certain classes of nonlinear dynamic systems following the T-S fuzzy model [1]. Since then there have been several approaches for the study of stability analysis and robust controller synthesis using the so-called parallel distributed compensation (PDC) method for uncertain nonlinear systems [2,3]. Sufficient conditions have been derived based on the feasibility testing of a linear matrix inequality (LMI) in [4-7] and extended for classes of nonlinear discrete-time systems with time delays in [8-10] via different approaches. Recently, much attention has been paid to the stability issue of network based control systems [11]. Several results pertaining to the analysis and design of networked control systems (NCSs) enhanced their wide benefits such as reducing system wiring, ease of system diagnosis and maintenance, and increasing system agility, to name a few. However, communication network in the control loops gave rise to some new issues, especially the intermittent losses or delays of the communicated information due to use of a network, which imposes a challenge to system analysis and design. To address this challenge, many results have been developed in consideration of network-induced delay and packet dropout [12-18], with focus on stability analysis and controller design with random delays.
Further consideration of the communication of the NCSs over the channel emphasized the importance of signal quantization, which has significant impact on the performance of NCSs. In this regard, the problem of guaranteed cost control and quantized controller design were discussed in [17] by using two quantizers in the network both from sensor to controller and from controller to actuator, and the network-induced delay and data dropped were considered as well.
Recent advances converted the quantized feedback design problem into a robust control problem with sector bound uncertainties, [11] and [16-18]. Parallel investigations to the class of switched discrete-time systems with interval time-delays were developed in [19-23].
Despite the potential of these developments, the problem of how to analyze the stability of nonlinear NCSs with data drops still open. On the other hand, most industrial plants have severe nonlinearities, which lead to additional difficulties for the analysis and design of control systems. Though some issues on nonlinear NCSs have been investigated [23,24], limited work has been found on robust state feedback controller design of networks for fuzzy systems with consideration of both network conditions and signal quantization.
The guaranteed cost networked control and robust  problem based on the T-S fuzzy model was treated in [25]. The results were derived by using a single Lyapunov function (SLF) method, which in general leas to a conservative result. Designing fuzzy controllers for a class of nonlinear networked control systems was considered in [26-28] by solving approximate uncertain linear networked Takagi-Sugeno (T-S) models with both network induced-delay and packet dropout. However, they do not quantize the signals. The foregoing facts motivate the present study.
problem based on the T-S fuzzy model was treated in [25]. The results were derived by using a single Lyapunov function (SLF) method, which in general leas to a conservative result. Designing fuzzy controllers for a class of nonlinear networked control systems was considered in [26-28] by solving approximate uncertain linear networked Takagi-Sugeno (T-S) models with both network induced-delay and packet dropout. However, they do not quantize the signals. The foregoing facts motivate the present study.
In this research work, we address the robust  state feedback control problem for discrete-time networked systems with state quantization and disturbances. The T-S fuzzy systems with norm-bounded uncertainties are utilized to characterize the nonlinear NCSs. Since the computation available is often limited, the quantized feedback controller is designed under consideration of effect of network-induced delay and data dropout, the employed quantizer is time-varying. By using a new fuzzy Lyapunov-Krasovskii functional (LKF), we provide a sufficient LMI-based condition for the existence of a fuzzy controller. A numerical example shows the feasibility of the developed technique.
state feedback control problem for discrete-time networked systems with state quantization and disturbances. The T-S fuzzy systems with norm-bounded uncertainties are utilized to characterize the nonlinear NCSs. Since the computation available is often limited, the quantized feedback controller is designed under consideration of effect of network-induced delay and data dropout, the employed quantizer is time-varying. By using a new fuzzy Lyapunov-Krasovskii functional (LKF), we provide a sufficient LMI-based condition for the existence of a fuzzy controller. A numerical example shows the feasibility of the developed technique.
Notations and facts: In the sequel, the Euclidean norm is used for vectors. We use  and
and  to denote the transpose and the inverse of any square matrix
to denote the transpose and the inverse of any square matrix , respectively. We use
, respectively. We use 
 to denote a symmetric positive definite (positive semi-definite, negative, negative semi-definite matrix
to denote a symmetric positive definite (positive semi-definite, negative, negative semi-definite matrix  and
and  to denote the
to denote the  identity matrix. Matrices, if their dimensions are not explicitly stated, are assumed to be compatible for algebraic operations. In symmetric block matrices or complex matrix expressions, we use the symbol (
identity matrix. Matrices, if their dimensions are not explicitly stated, are assumed to be compatible for algebraic operations. In symmetric block matrices or complex matrix expressions, we use the symbol ( ) to represent a term that is induced by symmetry.
) to represent a term that is induced by symmetry.
Fact 1: For any real matrices  and
and  with appropriate dimensions and
with appropriate dimensions and , it follows that
, it follows that

Sometimes, the arguments of a function will be omitted when no confusion can arise.
2. Problem Description
A typical networked control system typically has a clockdriven sampler and a quantizer, controller, a zero-order hold (ZOH) which is event-driven. The sampling period is assumed to be  with the sampling instants as
with the sampling instants as . The plant belongs to class of uncertain discrete-time systems where the parametric uncertainties are norm-bounded.
. The plant belongs to class of uncertain discrete-time systems where the parametric uncertainties are norm-bounded.
In what follows, we consider that this class is represented by Takagi-Sugeno fuzzy model composed of a set of fuzzy implications, and each implication is expressed by a linear system model. The  rule of this TakagiSugeno model has the following form:
rule of this TakagiSugeno model has the following form:



 (1)
(1)
where  are the premise variables, each
are the premise variables, each  are the fuzzy sets,
are the fuzzy sets,  is the number of if-then rules and
is the number of if-then rules and  is the state vector,
is the state vector,  is the control input,
is the control input,  is the output,
is the output,  is the disturbance input which belongs to
is the disturbance input which belongs to  and
and  indicates the maximum allowable signal transmission delay. The uncertain matrices
indicates the maximum allowable signal transmission delay. The uncertain matrices  are represented by:
are represented by:

 (2)
(2)
where the matrices  describe the nominal dynamics and
describe the nominal dynamics and  are known constant real matrices with appropriate dimensions. The matrices
are known constant real matrices with appropriate dimensions. The matrices  are unknown time-varying and satisfying
are unknown time-varying and satisfying .
.
Using a center average defuzzifier [1], product inference, and incorporating fuzzy “blending”, the fuzzy system under consideration can be cast into the form
 (3)
(3)
where
 (4)
(4)
where  is the grade of membership of
is the grade of membership of  in
in . In the sequel, we assume that
. In the sequel, we assume that

and therefore

Our objective in this paper is to design a fuzzy  state feedback controller with state quantization.
state feedback controller with state quantization.
3. Controlled Fuzzy System
In what follows, we proceed to consider establish the main result for the uncertain discrete-time fuzzy networked control systems described by (3) and design the quantized fuzzy  state feedback controller. We consider a limited capacity communication channel and for reducing the amount of data rate of transmitting in the network, which led to the increase quality of service of the network, we assume that the state vector
state feedback controller. We consider a limited capacity communication channel and for reducing the amount of data rate of transmitting in the network, which led to the increase quality of service of the network, we assume that the state vector  is measurable. The state signal from sensor to the controller is quantized via a quantizer, and then transmitted with a single packet. To reflect realty, network-induced time delay is modeled as an input delay and the packet dropout will be considered.
is measurable. The state signal from sensor to the controller is quantized via a quantizer, and then transmitted with a single packet. To reflect realty, network-induced time delay is modeled as an input delay and the packet dropout will be considered.
3.1. State-Feedback Control
In effect, we seek to design the state-feedback controller:
 (5)
(5)
where  is the feedback law to be defined in the sequel and
is the feedback law to be defined in the sequel and  are some integers such that
are some integers such that . Introduce
. Introduce  which contains the information of packet dropouts and improper packet sequence in the control signal. Note that
which contains the information of packet dropouts and improper packet sequence in the control signal. Note that .
.
It has been pointed out in [19] that when  there would be no packets dropout and the case
there would be no packets dropout and the case  represents continuous packets lost. In addition, when
represents continuous packets lost. In addition, when  the new packet reaches the destination before the old one. This case might lead to a less conservative result. In the sequel, we assume that
the new packet reaches the destination before the old one. This case might lead to a less conservative result. In the sequel, we assume that  and it is readily seen that
and it is readily seen that
It should be observed that  accounts for the time from the instant
accounts for the time from the instant  when sensor nodes sample the sensor data from the plant to the instant when actuator transfer data to the plant. Extending on this, we remark that
when sensor nodes sample the sensor data from the plant to the instant when actuator transfer data to the plant. Extending on this, we remark that

Consequently, we define

where  are known finite integers.
are known finite integers.
3.2. Quantizer
Let the quantizer be described as

where  is a symmetric, static and and time-invariant quantizer and the associated set of quantization levels is expressed as
is a symmetric, static and and time-invariant quantizer and the associated set of quantization levels is expressed as
 (6)
(6)
Note that the quantization regions are quite arbitrary. In case of logarithmic quantizer, the set of quantization levels  becomes
becomes

where  is the initial state of the quantizer and
is the initial state of the quantizer and  is a parameter associated with the quantizer
is a parameter associated with the quantizer . In this regard, a particular characterization of the quantizer is given by
. In this regard, a particular characterization of the quantizer is given by
where . It follows from [19] that, for any
. It follows from [19] that, for any , a sector bound expression can be expressed as:
, a sector bound expression can be expressed as:

For simplicity in exposition, we use  to denote
to denote . Thus,
. Thus,  can be written as
can be written as
We assume henceforth that the updating signal at the instant  has experienced signal transmission delay
has experienced signal transmission delay , however the delay between the sensor and quantizer is neglected. In view of the limited capacity in communication channel, the state signal from sensor to the controller is quantized via a logarithmic quantizer
, however the delay between the sensor and quantizer is neglected. In view of the limited capacity in communication channel, the state signal from sensor to the controller is quantized via a logarithmic quantizer  for reducing the amount of data rate of transmitting in the network. When the static and time-invariant quantizer
for reducing the amount of data rate of transmitting in the network. When the static and time-invariant quantizer , the state feedback controller would be in the form of
, the state feedback controller would be in the form of , which is the same as a traditional one.
, which is the same as a traditional one.
Incorporating the notion of parallel distributed compensation, the following fuzzy state-feedback stabilizing control law is used:

 (7)
(7)
where  is the control gain for rule
is the control gain for rule . Accordingly, the overall fuzzy control law is expressed by
. Accordingly, the overall fuzzy control law is expressed by
 (8)
(8)
Applying controller (8) to system (3) with some mathematical manipulations, the resulting closed-loop system can be cast into the form:
 (9)
(9)
which belongs to the class of switched time-delay system [15], where

 (10)
(10)

4. Quantized Fuzzy Control Design
In this section, we seek to establish a sufficient condition for the solvability of the robust  control problem. This condition will be expressed in an LMI framework to facilitate the design of the desired fuzzy state feedback controllers. Based on the so-called parallel distributed compensation scheme, the following theorem establishes a delay-dependent stabilization condition for the closedloop fuzzy networked control system (9):
control problem. This condition will be expressed in an LMI framework to facilitate the design of the desired fuzzy state feedback controllers. Based on the so-called parallel distributed compensation scheme, the following theorem establishes a delay-dependent stabilization condition for the closedloop fuzzy networked control system (9):
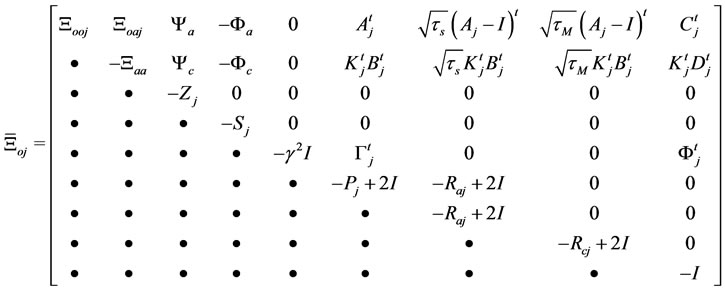
Theorem 4.1 Consider system (9). Given the bounds  and a scalar constant
and a scalar constant , there exists a fuzzy controller in the form of (8), such that the uncertain closedloop fuzzy system (9) with an
, there exists a fuzzy controller in the form of (8), such that the uncertain closedloop fuzzy system (9) with an  disturbance attention level
disturbance attention level  is asymptotically stable, if there exist matrices
is asymptotically stable, if there exist matrices  matrices
matrices  and scalars
and scalars 
 satisfying
satisfying
 (11)
(11)
 (12)
(12)




 (13)
(13)
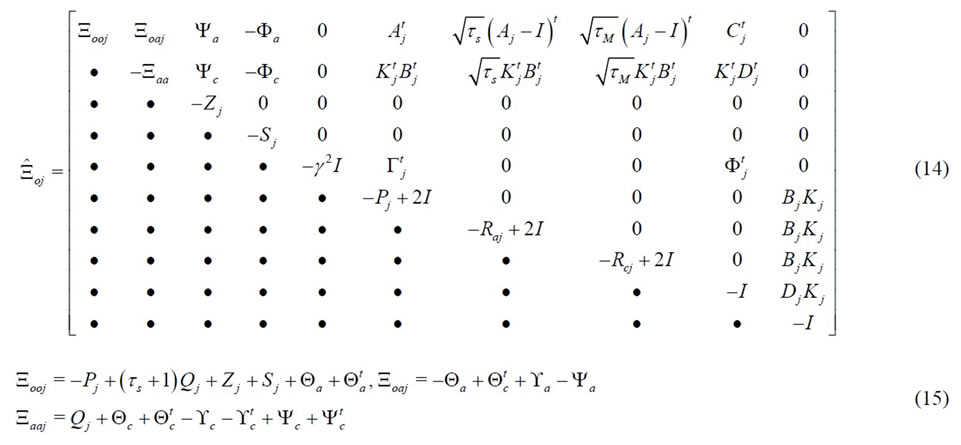
Proof: In what follows, we adopt a parameterdependent approach [15]. Consider system (9) with  and define
and define


 (16)
(16)
where  are matrices of appropriate dimensions and
are matrices of appropriate dimensions and 
 are fuzzy weighting matrices that are directly include the membership functions instead of a single matrix, a fact that aims at relaxing the conservatism. For simplicity in notation, we let
are fuzzy weighting matrices that are directly include the membership functions instead of a single matrix, a fact that aims at relaxing the conservatism. For simplicity in notation, we let





 (17)
(17)
In terms of the state increment  and the time-span
and the time-span we consider the Lyapunov-Krasovskii functional (LKF):
we consider the Lyapunov-Krasovskii functional (LKF):




 (18)
(18)
We focus initially on the case . A straightforward computation gives the first-difference of
. A straightforward computation gives the first-difference of
 along the solutions of (17) with the help of (9) and (10) as:
along the solutions of (17) with the help of (9) and (10) as:




 (19)
(19)
To facilitate the delay-dependence analysis, we invoke the following identities


 (20)
(20)
for some matrices , and proceed to get
, and proceed to get
 (21)
(21)
In terms of

we cast (31) with  into the form:
into the form:


 (22)
(22)
where  are given by (15). If
are given by (15). If  for all admissible uncertainties satisfying (2), then by Schur complements it follows from (32) that
for all admissible uncertainties satisfying (2), then by Schur complements it follows from (32) that  for any
for any  guaranteeing the internal stability. Proceeding further and to assure the closed-loop stability with
guaranteeing the internal stability. Proceeding further and to assure the closed-loop stability with  -disturbance attenuation, we follow [15] to get:
-disturbance attenuation, we follow [15] to get:
 (23)
(23)
when  where
where


 (24)
(24)
Next, by applying Fact 1, we obtain
 (25)
(25)
for some scalars . Note that
. Note that
 The quantities
The quantities  correspond to
correspond to  given by (13) after deleting the last element, and
given by (13) after deleting the last element, and
 (26)
(26)
where  are given by (15). Further convexification of
are given by (15). Further convexification of  in (35) yields
in (35) yields
 (27)
(27)
By Schur complements using the algebraic inequality  for any matrix
for any matrix , the desired stability condition can then be cast into the LMI (11), which concludes the proof.
, the desired stability condition can then be cast into the LMI (11), which concludes the proof.
Remark 4.1 It is significant to observe that Theorem 4.1 provides a delay-dependent condition for the design of robust  for fuzzy NCS in terms of feasibility testing of a family of strict LMIs with a total number of LMIvariables as
for fuzzy NCS in terms of feasibility testing of a family of strict LMIs with a total number of LMIvariables as . The key feature is that the matrix gain
. The key feature is that the matrix gain  is treated as a direct LMI variable. This will eventually lessen the conservatism in robust fuzzy control design.
is treated as a direct LMI variable. This will eventually lessen the conservatism in robust fuzzy control design.
Remark 4.2 It is worthy to note that the number of LMIs increases linearly with the number of rules  which limits the applicability of the method for very large values of
which limits the applicability of the method for very large values of . Had we used
. Had we used



then Theorem 4.1 reduces to the following corollary:
Corollary 4.1 Given the bounds  and a scalar constants
and a scalar constants , there exists a fuzzy controller in the form of (8), such that the uncertain closed-loop fuzzy system (9) with an
, there exists a fuzzy controller in the form of (8), such that the uncertain closed-loop fuzzy system (9) with an  disturbance attention level
disturbance attention level  is asymptotically stable, if there exist matrices
is asymptotically stable, if there exist matrices 
 matrices
matrices 
 and scalars
and scalars  satisfying
satisfying
 (28)
(28)







 (29)
(29)
 (30)
(30)


 (31)
(31)
and the number of LMI variables would be . The price paid is that the LKF becomes non-fuzzy.
. The price paid is that the LKF becomes non-fuzzy.
5. Special Cases
In this section, we seek to derive a sufficient condition for the solvability of the robust  control problem for NCS without quantizer.
control problem for NCS without quantizer.
NCS without Quantizer
In this case, the resulting closed-loop fuzzy system can be expressed as:
 (32)
(32)
The corresponding control design is given by the following corollary:
Corollary 5.1 Given the bounds  and a scalar constants
and a scalar constants , there exists a fuzzy controller in the form of (8), such that the uncertain closed-loop fuzzy system (23)
, there exists a fuzzy controller in the form of (8), such that the uncertain closed-loop fuzzy system (23)
with an  disturbance attention level
disturbance attention level  is asymptotically stable, if there exist matrices
is asymptotically stable, if there exist matrices 
 matrices
matrices 
 and scalars
and scalars  satisfying
satisfying
 (33)
(33)

 (34)
(34)
where the various terms are as in (13)-(15).
6. Example
In what follows, a typical simulation example is considered to illustrate the fuzzy controller design procedure developed in Theorem 4.1. A class of discrete-time fuzzy networked control systems model with state quantization is described by:





















The membership functions for the rules 1, 2, 3 are


For the purpose of implementation, we consider the fuzzy system to be controlled through a network. A quantizer  is selected to be of of logarithmic type with
is selected to be of of logarithmic type with  leading to
leading to 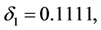
 . The bounds on data packet dropout are selected as
. The bounds on data packet dropout are selected as  respectively. Using the Matlab LMI solver, the feasible solution of
respectively. Using the Matlab LMI solver, the feasible solution of
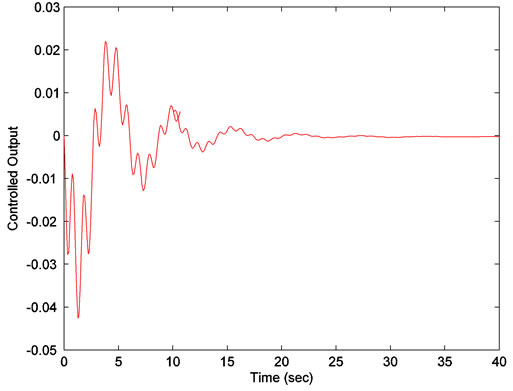
Figure 1. Controlled-output trajectory.
Figure 2. First state trajectory.
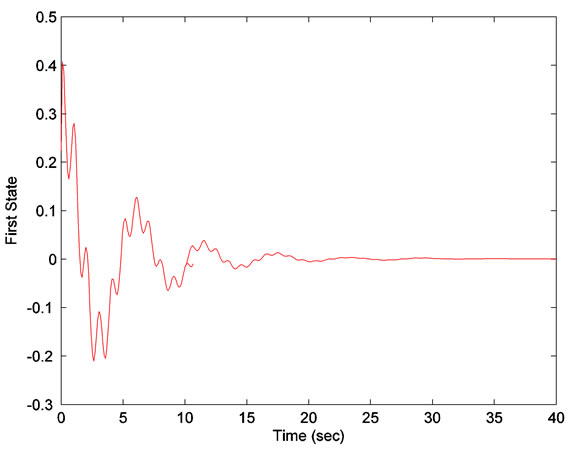
Figure 3. Second state trajectory.
Theorem 4.1 yields the fuzzy  state-feedback controller gains of the form:
state-feedback controller gains of the form:
The simulation results of the state and controlledoutput trajectories are plotted in Figures 1-3. It is quite evident that all the state and output variables of the fuzzy system settle at the equilibrium level within 20 sec.
7. Conclusion
We have addressed the problem of robust  statefeedback controller design for discrete-time TakagiSugeno (T-S) fuzzy networked control systems including state quantization. A quantized feedback fuzzy controller has been designed under consideration of effect of network-induced delay and data dropout, and the timevarying quantizer has been selected to be logarithmic. By employing a fuzzy Lyapunov-Krasovskii functional, we have derived some LMI-based sufficient conditions for the existence of fuzzy controller. A numerical example has been given to illustrate the efficiency of the theoretic results.
statefeedback controller design for discrete-time TakagiSugeno (T-S) fuzzy networked control systems including state quantization. A quantized feedback fuzzy controller has been designed under consideration of effect of network-induced delay and data dropout, and the timevarying quantizer has been selected to be logarithmic. By employing a fuzzy Lyapunov-Krasovskii functional, we have derived some LMI-based sufficient conditions for the existence of fuzzy controller. A numerical example has been given to illustrate the efficiency of the theoretic results.
8. Acknowledgements
The author would like to thank the deanship of scientific research (DSR) at KFUPM for financial support through research group project RG1105-1.
REFERENCES
- T. Takagi and M. Sugeno, “Fuzzy Identification of Systems and Its Applications to Modeling and Control,” IEEE Transactions on Systems, Man, and Cybernetics, Vol. 15, No. 1, 1985, pp. 116-132.
- K. Tanaka, T. Ikeda and H. Wang, “Robust Stabilization of a Class of Uncertain Nonlinear Systems via Fuzzy Control: Quadratic Stabilizability,
 Control Theory, and Linear Matrix Inequalities,” IEEE Transactions on Fuzzy Systems, Vol. 4, No. 1, 1996, pp. 1-13. doi:10.1109/91.481840
Control Theory, and Linear Matrix Inequalities,” IEEE Transactions on Fuzzy Systems, Vol. 4, No. 1, 1996, pp. 1-13. doi:10.1109/91.481840 - X. Guan and C. Chen, “Delay-Dependent Guaranteed Cost Control for T-S Fuzzy Systems with Time Delays,” IEEE Transactions on Fuzzy Systems, Vol. 12, No. 2, 2004, pp. 236-249. doi:10.1109/TFUZZ.2004.825085
- Y. Cao and P. Frank, “Analysis and Synthesis of Nonlinear Time-Delay systems via Fuzzy Control Approach,” IEEE Transactions on Fuzzy Systems, Vol. 8, No. 2, 2000, pp. 200- 211. doi:10.1109/91.842153
- S. Zhou and T. Li, “Robust Stabilization for Delayed Discrete-Time Fuzzy Systems via Basis-Dependent Lyapunov-Krasovskii Function,” Fuzzy Sets and Systems, Vol. 151, No. 1, 2005, pp. 139-153. doi:10.1016/j.fss.2004.08.014
- S. Xu and J. Lam, “Robust
 Control for Uncertain Discrete-Time-Delay Fuzzy Systems via Output Feedback Controllers,” IEEE Transactions on Fuzzy Systems, Vol. 13, No. 1, 2005, pp. 82-93. doi:10.1109/TFUZZ.2004.839661
Control for Uncertain Discrete-Time-Delay Fuzzy Systems via Output Feedback Controllers,” IEEE Transactions on Fuzzy Systems, Vol. 13, No. 1, 2005, pp. 82-93. doi:10.1109/TFUZZ.2004.839661 - H. J. Lee, J. B. Park and G. Chen, “Robust Fuzzy Control of Nonlinear Systems with Parametric Uncertainties,” IEEE Transactions on Fuzzy Systems, Vol. 9, No. 2, 2001, pp. 369-379. doi:10.1109/91.919258
- S. Chen, W. Chang and S. Su, “Robust Static OutputFeedback Stabilization for Nonlinear Discrete-Time Systems with Time Delay via Fuzzy Control Approach,” Fuzzy Sets and Systems, Vol. 13, No. 2, 2005, pp. 263- 272.
- Y. Cao and P. Frank, “Robust
 Disturbance Attenuation for a Class of Uncertain Discrete-Time Fuzzy Systems,” IEEE Transactions on Fuzzy Systems, Vol. 8, No. 4, 2000, pp. 406-415. doi:10.1109/91.868947
Disturbance Attenuation for a Class of Uncertain Discrete-Time Fuzzy Systems,” IEEE Transactions on Fuzzy Systems, Vol. 8, No. 4, 2000, pp. 406-415. doi:10.1109/91.868947 - H. Wu, “Delay-dependent Stability Analysis and Stabilization for Discrete-Time Fuzzy Systems with State Delay: A Fuzzy Lyapunov-Krasovskii Functional Approach,” IEEE Transactions on Fuzzy Systems, Vol. 36, No. 4, 2006, pp. 954-962.
- H. Gao, T. Chen and J. Lam, “A New Delay System Approach to Network-Based Control,” Automatica, Vol. 44, No. 1, 2008, pp. 39-52. doi:10.1016/j.automatica.2007.04.020
- J. Wu and T. Chen, “Design of Networked Control Systems with Packet Dropouts,” IEEE Transactions on Automatic Control, Vol. 52, No. 7, 2007, pp. 1314-1319.
- A. Zhang and L. Yu, “Output Feedback Stabilization of Networked Control Systems with Packet Dropouts,” IEEE Transactions on Automatic Control, Vol. 52, No. 9, 2007, pp. 1705-1710. doi:10.1109/TAC.2007.904284
- L. Zhang, Y. Shi, T. Chen and B. Huang, “A New Method for Stabilization of Networked Control Systems with Random Delays,” IEEE Transactions on Automatic Control, Vol. 50, No. 8, 2005, pp. 1177-1181.
- M. S. Mahmoud, “Switched Time-Delay Systems,” Springer-Verlag, New York, 2010.
- E. Tian, D. Yue and C. Peng, “Quantized Output Feedback Control for Networked Control Systems,” Information Sciences, Vol. 178, 2008, pp. 2734-2749. doi:10.1016/j.ins.2008.01.019
- D. Yue, C. Peng and G. Tang, “Guaranteed Cost Control of Linear Systems over Networks with State and Input Quantizations,” IET Control Theory and Application, Vol. 153, No. 6, 2006, pp. 658-664. doi:10.1049/ip-cta:20050294
- P. Chen and C. Yu, “Networked
 Control of Linear Systems with State Quantization,” Information Sciences, Vol. 177, 2007, pp. 5763-5774. doi:10.1016/j.ins.2007.05.025
Control of Linear Systems with State Quantization,” Information Sciences, Vol. 177, 2007, pp. 5763-5774. doi:10.1016/j.ins.2007.05.025 - M. S. Mahmoud, “Delay-Dependent
 Filtering of a Class of Switched Discrete-Time State-Delay Systems,” Signal Processing, Vol. 88, No. 11, 2008, pp. 2709-2719. doi:10.1016/j.sigpro.2008.05.014
Filtering of a Class of Switched Discrete-Time State-Delay Systems,” Signal Processing, Vol. 88, No. 11, 2008, pp. 2709-2719. doi:10.1016/j.sigpro.2008.05.014 - M. S. Mahmoud, A. W. Saif and P. Shi, “Stabilization of Linear Switched Delay Systems:
 and
and  Methods,” Journal of Optimization Theory and Applications, Vol. 142, No. 3, 2009, pp. 583-607. doi:10.1007/s10957-009-9527-2
Methods,” Journal of Optimization Theory and Applications, Vol. 142, No. 3, 2009, pp. 583-607. doi:10.1007/s10957-009-9527-2 - J. Zhang, Y. Xia and M. S. Mahmoud, “Robust Generalized
 and
and  Static Output Feedback Control for Uncertain Discrete-Time Fuzzy Systems,” IET Control Theory and Applications, Vol. 3, No. 7, 2009, pp. 865-876. doi:10.1049/iet-cta.2008.0146
Static Output Feedback Control for Uncertain Discrete-Time Fuzzy Systems,” IET Control Theory and Applications, Vol. 3, No. 7, 2009, pp. 865-876. doi:10.1049/iet-cta.2008.0146 - H. Gao, P. Shi and J. Wang, “Parameter-Dependent Robust Stability of Uncertain Time-Delay Systems,” Computational & Applied Mathematics, Vol. 206, No. 1, 2007, pp. 366-373. doi:10.1016/j.cam.2006.07.027
- H. Gao, J. Lam, C. Wang and Y. Wang, “Delay-Dependent Output-Feedback Stabilization of Discrete-Time Systems with Time-Varying State Delay,” IEE Proceedings of Control Theory and Applications, Vol. 151, No. 6, 2004, pp. 691-698. doi:10.1049/ip-cta:20040822
- H. Gao and T. Chen, “A New Approach to Quantized Feedback Control Systems,” Automatica, Vol. 44, No. 2, 2008, pp. 534-542. doi:10.1016/j.automatica.2007.06.015
- G. Walsh and H. Ye, “Scheduling of Networked Control Systems,” IEEE Control Systems Magazine, Vol. 21, No. 1, 2001, pp. 57-65. doi:10.1109/37.898792
- H. Zhang, D. Yang and T. Chai, “Guaranteed Cost Networked Control for T-S Fuzzy Systems with Time Delays,” Applications and Reviews, Vol. 37, No. 2, 2007, pp. 160-172.
- L. Zhang and H. Fang, “Fuzzy Controller Design for Networked Control System with Time-Variant Delays,” Journal of Systems Engineering and Electronics, Vol. 17, No. 1, 2006, pp. 172-176. doi:10.1016/S1004-4132(06)60030-3
- X. Jiang and Q. Han, “On Designing Fuzzy Controllers for a Class of Nonlinear Networked Control Systems,” IEEE Transactions on Fuzzy Systems, Vol. 16, No. 4, 2008, pp. 1050-1060. doi:10.1109/TFUZZ.2008.917293