Applied Mathematics
Vol.3 No.10(2012), Article ID:23370,8 pages DOI:10.4236/am.2012.310169
A Geometrical Characterization of Spatially Curved Roberstion-Walker Space and Its Retractions
1Mathematics Department, Faculty of Science, Taibah University, Madinah, KSA
2Mathematics Department, Faculty of Science, Tanta University, Tanta, Egypt
Email: a_elahmady@hotmail.com
Received June 26, 2012; revised September 3, 2012; accepted September 10, 2012
Keywords: Retraction; Deformation Retracts; Foldings; Flat Robertson-Walker Model
ABSTRACT
Our aim in the present article is to introduce and study new types of retractions of closed flat Robertson-Walker W4 model. Types of the deformation retract of closed flat Robertson-Walker W4 model are obtained. The relations between the retraction and the deformation retract of curves in W4 model are deduced. Types of minimal retractions of curves in W4 model are also presented. Also, the isometric and topological folding in each case and the relation between the deformation retracts after and before folding have been obtained. New types of homotopy maps are deduced. New types of conditional folding are presented. Some commutative diagrams are obtained.
1. Introduction
As is well known, the theory of retractions is always one of interesting topics in Euclidian and Non-Euclidian space and it has been investigated from the various viewpoints by many branches of topology and differential geometry El-Ahmady [1].
El-Ahmady [1-13] studied the variation of the density function on chaotic spheres in chaotic space-like Minkowski space time, folding of fuzzy hypertori and their retractions, limits of fuzzy retractions of fuzzy hyperspheres and their foldings, fuzzy folding of fuzzy horocycle, fuzzy Lobachevskian space and its folding, the deformation retract and topological folding of Buchdahi space, retraction of chaotic Ricci space, a calculation of geodesics in chaotic flat space and its folding, fuzzy deformation retract of fuzzy horospheres, on fuzzy spheres in fuzzy Minkowski space, retractions of spatially curved Robertson-Walker space, a calculation of geodesics in flat Robertson-Walker space and its folding, and retraction of chaotic black hole.
An n-dimensional topological manifold M is a Hausdorff topological space with a countable basis for the topology which is locally homeomorphic to . If
. If  is a homeomorphism of
is a homeomorphism of  onto
onto , then h is called a chart of M and U is the associated chart domain. A collection (
, then h is called a chart of M and U is the associated chart domain. A collection ( ) is said to be an atlas for M if
) is said to be an atlas for M if . Given two charts
. Given two charts  such that
such that , the transformation chart
, the transformation chart  between open sets of
between open sets of  is defined, and if all of these charts transformation are
is defined, and if all of these charts transformation are  -mappings, then the manifolds under consideration is a
-mappings, then the manifolds under consideration is a  -manifolds. A differentiable structure on M is a differentiable atlas and a differentiable manifolds is a topological manifolds with a differentiable structure Arkowitz [14] Banchoff [15], Dubrovin [16], Kuhnel [17], Montiel [18].
-manifolds. A differentiable structure on M is a differentiable atlas and a differentiable manifolds is a topological manifolds with a differentiable structure Arkowitz [14] Banchoff [15], Dubrovin [16], Kuhnel [17], Montiel [18].
Most folding problems are attractive from a pure mathematical standpoint, for the beauty of the problems themselves. The folding problems have close connections to important industrial applications Linkage folding has applications in robotics and hydraulic tube bending. Paper folding has application in sheet-metal bending, packaging, and air-bag folding Demainel [19]. Following the great Soviet geometer Pogorelov [20], also, used folding to solve difficult problems related to shell structures in civil engineering and aero space design, namely buckling instability El Naschie [21]. Isometric folding between two Riemannian manifold may be characterized as maps that send piecewise geodesic segments to a piecewise geodesic segments of the same length ElAhmady [4]. For a topological folding the maps do not preserves lengths El-Ahmady [5,6].
A subset  of a topological space
of a topological space  is called a retract of
is called a retract of  if there exists a continuous map
if there exists a continuous map  such that
such that 
 where
where  is closed and
is closed and  is open El-Ahmady [3,7]. Also, let
is open El-Ahmady [3,7]. Also, let  be a space and
be a space and  a subspace. A map
a subspace. A map  such that
such that  for all
for all  is called a retraction of
is called a retraction of  onto
onto  and
and  is the called a retract of
is the called a retract of  This can be re stated as follows. If
This can be re stated as follows. If  is the inclusion map, then
is the inclusion map, then  is a map such that
is a map such that  If, in addition,
If, in addition,  we call r a deformation retract and
we call r a deformation retract and  a deformation retract of X Another simple-but extremely useful-idea is that of a retract. If
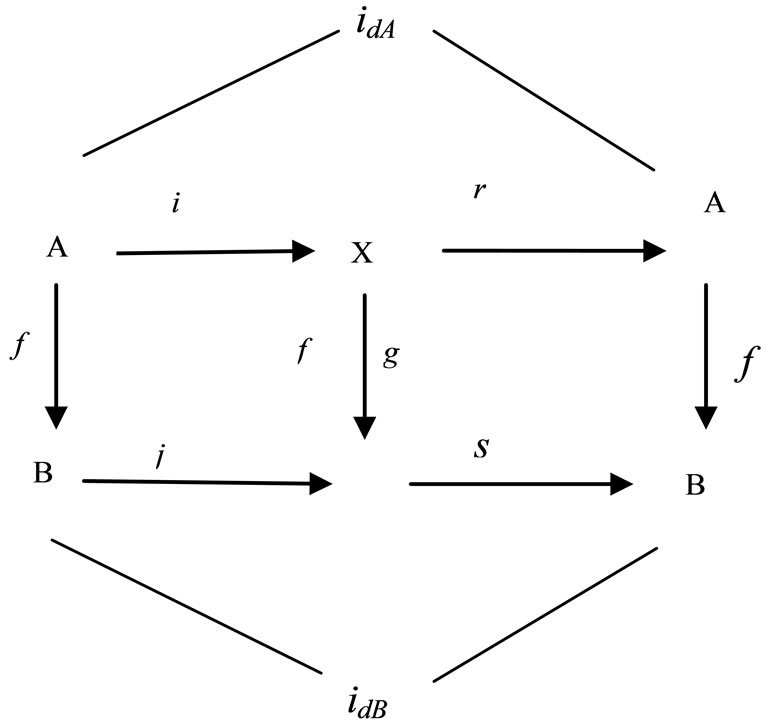
a deformation retract of X Another simple-but extremely useful-idea is that of a retract. If  then A is a retract of X if there is a commutative diagram.
then A is a retract of X if there is a commutative diagram.
If  and
and  then
then  is a retract of g if there is a commutative diagram Arkowitz [14], Naber [22], Shick [23] and Strom [ 24].
is a retract of g if there is a commutative diagram Arkowitz [14], Naber [22], Shick [23] and Strom [ 24].
2. Main Results
The flat Robertson-Walker  Line element
Line element  is one example of a homogeneous isotropic cosmological spacetime geometry, but not the only one. The general RobertsonWalker
is one example of a homogeneous isotropic cosmological spacetime geometry, but not the only one. The general RobertsonWalker  Line element for a homogeneous isotropic universe has the form
Line element for a homogeneous isotropic universe has the form  where dl2 is the line element of a homogeneous, isotropic threedimensional space. There are only three possibilities for this. Let’s now look at the closed flat Robertson-Walker
where dl2 is the line element of a homogeneous, isotropic threedimensional space. There are only three possibilities for this. Let’s now look at the closed flat Robertson-Walker  model. In the present work we give first some rigorous definitions of retractions, folding and deformation retraction as well as important theorems of closed flat Robertson-Walker
model. In the present work we give first some rigorous definitions of retractions, folding and deformation retraction as well as important theorems of closed flat Robertson-Walker  model. In what follows, we would like to introduce the types of retraction, folding and deformation retraction of closed flat RobertsonWalker
model. In what follows, we would like to introduce the types of retraction, folding and deformation retraction of closed flat RobertsonWalker  model El-Ahmady [11,12], Hartle [25], Straumann [26] with metric
model El-Ahmady [11,12], Hartle [25], Straumann [26] with metric
 (1)
(1)
The coordinate of closed flat Robertson-Walker space  are
are
 (2)
(2)
where the range of the three polar angles  is given by
is given by  and
and 
Now, we use Lagrangian equations
To find a geodesic which is a subset of the closed flat Robertson-Walker space . Since
. Since

Then the Lagrangian equations for closed flat Robertson-Walker space  are.
are.
 (3)
(3)
 (4)
(4)
 (5)
(5)
From Equation (5) we obtain  constant say
constant say , if
, if , we obtain the following cases:
, we obtain the following cases:
If  hence we get the coordinates of closed flat Robertson-Walker space
hence we get the coordinates of closed flat Robertson-Walker space  which are given by
which are given by
 .
.
Which is the sphere ,
,  , it is a minimal geodesic and minimal retraction. Also, if
, it is a minimal geodesic and minimal retraction. Also, if hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere ,
,  , it is a minimal geodesic and minimal retraction. Again, if
, it is a minimal geodesic and minimal retraction. Again, if hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere ,
,  it is a minimal geodesic and minimal retraction. Also, if
it is a minimal geodesic and minimal retraction. Also, if hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere ,
,  , it is a minimal geodesic and minimal retraction. If
, it is a minimal geodesic and minimal retraction. If  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere ,
,  , it is a minimal geodesic and minimal retraction. Again, if
, it is a minimal geodesic and minimal retraction. Again, if  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
 .
.
This is the sphere ,
,  it is a minimal geodesic and minimal retraction. Also, if
it is a minimal geodesic and minimal retraction. Also, if  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere ,
,  , it is a minimal geodesic and minimal retraction. If
, it is a minimal geodesic and minimal retraction. If  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the sphere ,
,  , it is a minimal geodesic and minimal retraction. Again, if
, it is a minimal geodesic and minimal retraction. Again, if hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere , it is a minimal geodesic and minimal retraction. Also, if
, it is a minimal geodesic and minimal retraction. Also, if hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere , it is a minimal geodesic and minimal retraction. If
, it is a minimal geodesic and minimal retraction. If  hence we get the coordinate of closed flat RobertsonWalker space
hence we get the coordinate of closed flat RobertsonWalker space  which are given by
which are given by
Which is the hypersphere , it is a minimal geodesic and minimal retraction. Again, if
, it is a minimal geodesic and minimal retraction. Again, if hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the hypersphere , it is a minimal geodesic and minimal retraction. Also, if
, it is a minimal geodesic and minimal retraction. Also, if  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the sphere , it is a minimal geodesic and minimal retraction. If
, it is a minimal geodesic and minimal retraction. If  hence we get the coordinate of closed flat RobertsonWalker space
hence we get the coordinate of closed flat RobertsonWalker space  which are given by
which are given by
This is the sphere , it is a minimal geodesic and minimal retraction. Again, if
, it is a minimal geodesic and minimal retraction. Again, if  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
 .
.
Which is the point of the hypersphere  , it is a minimal geodesic and minimal retraction. Also, if
, it is a minimal geodesic and minimal retraction. Also, if  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the sphere , it is a minimal geodesic and minimal retraction. If
, it is a minimal geodesic and minimal retraction. If  hence we get the coordinate of closed flat RobertsonWalker space
hence we get the coordinate of closed flat RobertsonWalker space  which are given by
which are given by
 .
.
Which is the point of the hypersphere  , it is a minimal geodesic and minimal retraction . Also, if
, it is a minimal geodesic and minimal retraction . Also, if  hence we get the coordinate of closed flat Robertson-Walker space
hence we get the coordinate of closed flat Robertson-Walker space  which are given by
which are given by
Which is the sphere , it is a minimal geodesic and minimal retraction .
, it is a minimal geodesic and minimal retraction .
Theorem 1. The retractions of closed flat RobertsonWalker space  are minimal geodesics and geodesic spheres.
are minimal geodesics and geodesic spheres.
In this position, we present some cases of deformation retract of open flat Robertson-Walker space . The deformation retract of open flat Robertson-Walker space
. The deformation retract of open flat Robertson-Walker space  is
is
 where
where  be the open flat Robertson-Walker space
be the open flat Robertson-Walker space  and is the closed interval [0, 1], be present as
and is the closed interval [0, 1], be present as
The deformation retract of the open flat RobertsonWalker space  into the sphere
into the sphere  is
is
where
and
The deformation retract of the open flat RobertsonWalker space  into the sphere
into the sphere  is
is
The deformation retract of the open flat RobertsonWalker space  into the sphere
into the sphere  is
is
Now, we are going to discuss the folding  of the open flat Robertson-Walker
of the open flat Robertson-Walker  space Let
space Let , where
, where
 (6)
(6)
An isometric folding of the open flat RobertsonWalker  space into itself may be defined by
space into itself may be defined by
The deformation retract of the folded open flat Robertson-Walker space  into the folded geodesic
into the folded geodesic  is:
is:
with
The deformation retract of the folded open flat Robertson-Walker space  into the folded geodesic
into the folded geodesic  is:
is:
The deformation retract of the folded open flat Robertson-Walker space  into the folded geodesic
into the folded geodesic  is:
is:
Then, the following theorem has been proved.
Theorem 2. Under the defined folding and any folding homeomorphic to this type of folding, the deformation retract of the folded open flat Robertson-Walker space  into the folded geodesics is the same as the deformation retract of open flat Robertson-Walker space
into the folded geodesics is the same as the deformation retract of open flat Robertson-Walker space  into the geodesics.
into the geodesics.
Now, let the folding be defined by:
 where
where
 (7)
(7)
The isometric folded open flat Robertson-Walker space  is:
is:
The deformation retract of the folded open flat Robertson-Walker space  into the folded geodesic
into the folded geodesic  is:
is:
with
The deformation retract of the folded open flat Robertson-Walker space  into the folded geodesic
into the folded geodesic  is:
is:
The deformation retract of the folded open flat Robertson-Walker space  into the folded geodesic
into the folded geodesic  is:
is:
Then, the following theorem has been proved.
Theorem 3. Under the defined folding and any folding homeomorphic to this type of folding, the deformation retract of the folded open flat Robertson-Walker space  into the folded geodesics is different from the deformation retract of open flat Robertson-Walker space
into the folded geodesics is different from the deformation retract of open flat Robertson-Walker space  into the geodesics.
into the geodesics.
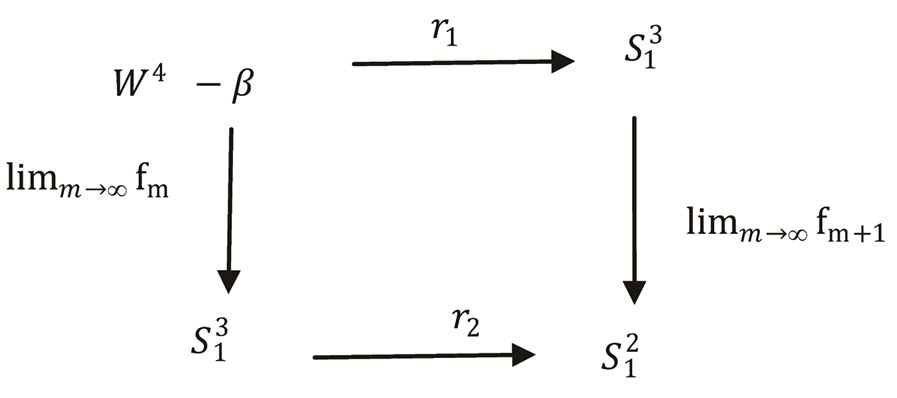
Lemma 1. The relations between the retractions and the limits of the folding of open flat Robertson-Walker space  discussed from the following commutative diagrams
discussed from the following commutative diagrams
Lemma 2. The end of limits of the folding of closed flat Robertson-Walker space  is a 0-dimensional space.
is a 0-dimensional space.
Proof. Let
Let
 .
.
Consequently,  -dimensional sphere, it is a minimal geodesic.
-dimensional sphere, it is a minimal geodesic.
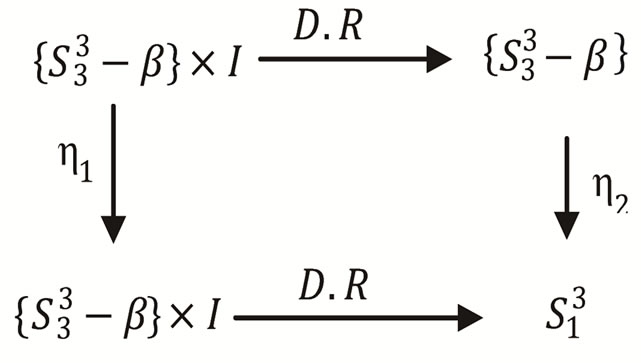
Lemma 3. The relation between the retraction and the deformation retract of open flat Robertson-Walker space  discussed from the following commutative diagram
discussed from the following commutative diagram
Theorem 4. Any folding of  into
into  induces folding of B
induces folding of B into
into  from
from
Proof. Let 
 , then there is an induced folding
, then there is an induced folding
 such that
such that
 and
and
 such that the following diagram is commutative
such that the following diagram is commutative
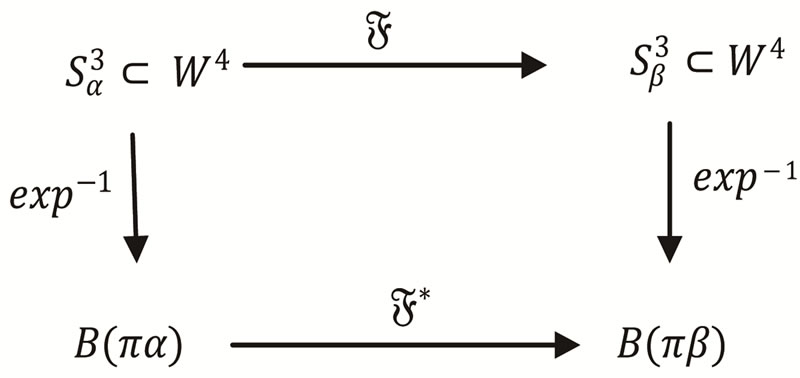
i.e. 
Theorem 5. Any retraction of  into
into
 induces retraction of
induces retraction of 
into .
.
Proof. Let r be a retraction map,

where  and
and  are the open sphere in
are the open sphere in
 . Also, let
. Also, let
 and
and

such that .
.
Then we have the retraction  such that
such that
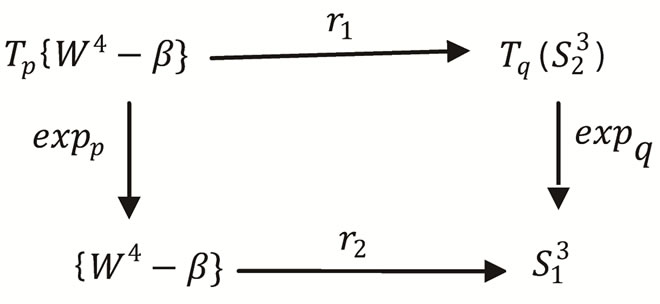
Theorem 6. Any retraction then the map
then the map  induced by the exponential map.
induced by the exponential map.
Proof. Let a retraction , be a retraction of
, be a retraction of  into
into . Also, Let
. Also, Let  and
and .
.
Then we have the retraction 
such that 
Theorem 7. Any retraction , then the map
, then the map  induced by the inverse exponential map.
induced by the inverse exponential map.
Proof. Let a retraction , be a retraction of
, be a retraction of  int
int . Also, Let
. Also, Let
 and
and .
.
Then we have the retraction
 such that
such that
Theorem 8. If the retraction of the sphere  is
is , the inclusion map of
, the inclusion map of  is
is , and inclusion map of
, and inclusion map of  is
is . Then there are induces retractions such that the following diagram is commutative.
. Then there are induces retractions such that the following diagram is commutative.
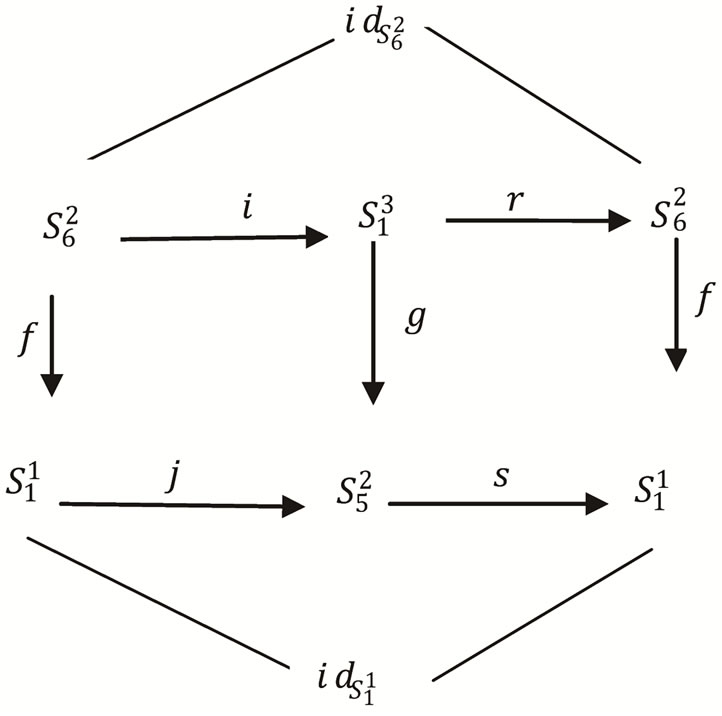
Proof. Let the retraction map of the hypersphere  is
is , the inclusion map of
, the inclusion map of  is
is 
 , the retraction map of
, the retraction map of  is
is , the retraction map of
, the retraction map of is given by
is given by , and
, and . Hence, the following diagram is commutative.
. Hence, the following diagram is commutative.
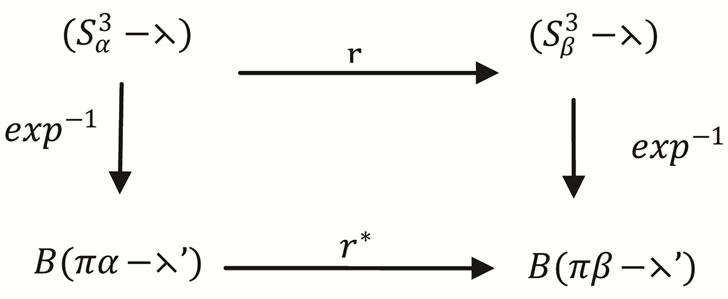
Theorem 9. If the retraction of the sphere  is
is ,
,  and
and .
.
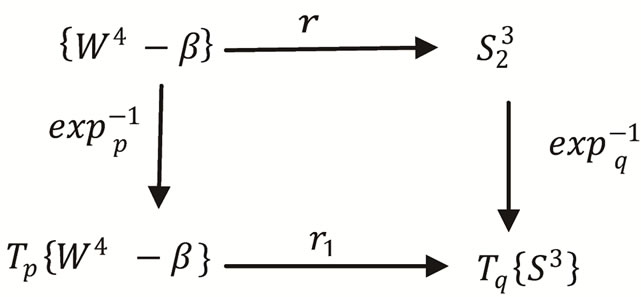
Then there are induces exponential inverse map such that the following diagram is commutative.
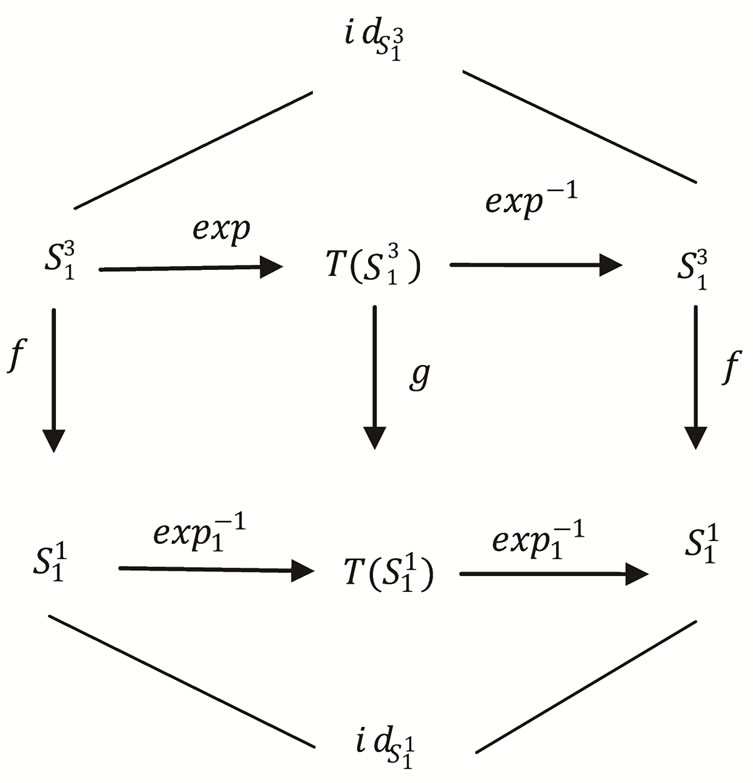
Proof. Let the retraction map of the hypersphere  is
is ,
,
 ,
, ,
,  , and
, and . Hence, the following diagram is commutative.
. Hence, the following diagram is commutative.
3. Conclusion
The present article deals what we consider to be closed flat Robertson-Walker  model. The retractions of closed flat Robertson-Walker
model. The retractions of closed flat Robertson-Walker  model are presented. The deformation retract of closed flat Robertson-Walker
model are presented. The deformation retract of closed flat Robertson-Walker  model will be deduced. The connection between folding and deformation retract is achieved. New types of conditional folding are presented. Also, the relations between the limits of folding and retractions are discussed. Some commutative diagrams are presented.
model will be deduced. The connection between folding and deformation retract is achieved. New types of conditional folding are presented. Also, the relations between the limits of folding and retractions are discussed. Some commutative diagrams are presented.
REFERENCES
- A. E. El-Ahmady, “The Variation of the Density Functions on Chaotic Spheres in Chaotic Space-Like Minkowski Space Time,” Chaos, Solitons and Fractals, Vol. 31, No. 5, 2007, pp. 1272-1278. doi:10.1016/j.chaos.2005.10.112
- A. E. El-Ahmady, “Folding of Fuzzy Hypertori and Their Retractions,” Proc. Math. Phys. Soc. Egypt, Vol. 85, No. 1, 2007, pp. 1-10.
- A. E. El-Ahmady, “Limits of Fuzzy Retractions of Fuzzy Hyperspheres and Their Foldings,” Tamkang Journal of Mathematics, Vol. 37, No. 1, 2006, pp. 47-55.
- A. E. El-Ahmady, “Fuzzy Folding of Fuzzy Horocycle,” Circolo Matematico di Palermo Serie II, Tomo L III, 2004, pp. 443-450. doi:10.1007/BF02875737
- A. E. El-Ahmady, “Fuzzy Lobachevskian Space and Its Folding,” The Journal of Fuzzy Mathematics, Vol. 12, No. 2, 2004, pp. 609-614.
- A. E. El-Ahmady, “The Deformation Retract and Topological Folding of Buchdahi Space,” Periodica Mathematica Hungarica, Vol. 28, No. 1, 1994, pp. 19-30. doi:10.1007/BF01876366
- A. E. El-Ahmady and H. Rafat, “Retraction of Chaotic Ricci Space,” Chaos, Solutions and Fractals, Vol. 41, 2009, pp. 394-400. doi:10.1016/j.chaos.2008.01.010
- A. E. El-Ahmady and H. Rafat, “A Calculation of Geodesics in Chaotic Flat Space and Its Folding,” Chaos, Solutions and Fractals, Vol. 30, 2006, pp. 836-844. doi:10.1016/j.chaos.2005.05.033
- A. E. El-Ahmady and H. M. Shamara, “Fuzzy Deformation Retract of Fuzzy Horospheres,” Indian Journal of Pure and Applied Mathematics, Vol. 32, No. 10, 2001, pp. 1501-1506.
- A. E. El-Ahmady and A. El-Araby, “On Fuzzy Spheres in Fuzzy Minkowski Space,” Nuovo Cimento, Vol. 125B, 2010.
- A. E. El-Ahmady and A. S. Al-Luhaybi, “Retractions of Spatially Curved Robertson-Walker Space,” The Journal of American Sciences, Vol. 8, No. 5, 2012, pp. 548-553.
- A. E. El-Ahmady and A. S. Al-Luhaybi, “A Calculation of Geodesics in Flat Robertson-Walker Space and Its Folding,” International Journal of Applied Mathematics and Statistics, Vol. 32, No. 3, 2013, pp. 82-91.
- A. E. El-Ahmady, “Retraction of Chaotic Black Hole,” The Journal of Fuzzy Mthematics, Vol. 19, No. 4, 2011, pp. 833-838.
- M. Arkowitz, “Introduction to Homotopy Theory,” Springer-Village, New York, 2011.
- T. Banchoff and S. Lovett, “Differential Geometry of Curves and Surfaces,” India, 2010.
- B. A. Dubrovin, A. T. Fomenoko and S. P. Novikov, “Modern Geometry-Methods and Applications,” SpringerVerlage, New York, Heidelberg, Berlin, 1984.
- W. Kuhnel, “Differential Geometry Curves—SurfacesManifolds,” American Mathematical Society, 2006.
- S. Montiel and A. Ros, “Curves and Surfaces,” American Mathematical Society, Madrid, 2009.
- E. D. Demainel, “Folding and Unfolding,” Ph. D. Thesis, Waterloo University, Waterloo, 2001.
- A. V. Pogorelov, “Differential Geometry,” Noordhoff, Groningen, 1959.
- M. S. El Naschie, “Stress, Stability and Chaos in Structural Engineering,” McGraw-Hill, New York, 1990.
- G. L. Naber, “Topology, Geometry and Gauge Fields,” Springer, New York, 2011.
- P. l. Shick, “Topology: Point-Set and Geometry,” New York, Wiley, 2007. doi:10.1002/9781118031582
- J. Strom, “Modern Classical Homotopy Theory,” American Mathematical Society, 2011.
- J. B. Hartle, “Gravity, an Introduction to Einstein’s General Relativity,” Addison-Wesley, New York, 2003.
- N. Straumann, “General Relativity with Application to Astrophysics,” Springer-Verlage, New York, 2004.