Applied Mathematics
Vol.3 No.12(2012), Article ID:25444,5 pages DOI:10.4236/am.2012.312258
Pontryagin’s Maximum Principle for a Advection-Diffusion-Reaction Equation*
1School of Mathematics and Physics, University of South China, Hengyang, China
2School of Mathematical Sciences, Fudan University, Shanghai, China
3Department of Mathematics and Computation Sciences, Hunan City University, Yiyang, China
Email: youjunxu@163.com, xiaocuie@163.com
Received July 2, 2012; revised November 19, 2012; accepted November 26, 2012
Keywords: Optimal Control; Pontryagin’s Maximum Principle; State Constraint
ABSTRACT
In this paper we investigate optimal control problems governed by a advection-diffusion-reaction equation. We present a method for deriving conditions in the form of Pontryagin’s principle. The main tools used are the Ekeland’s variational principle combined with penalization and spike variation techniques.
1. Introduction
Consider the following controlled advection convection diffusion equations:
 (1.1)
(1.1)
where  is a convex bounded domain with a smooth boundary
is a convex bounded domain with a smooth boundary , the diffusity
, the diffusity  with
with
 , the reaction
, the reaction  with
with
 , and the advective field
, and the advective field with
with  and
and  are assigned functions. Here
are assigned functions. Here , with
, with  being a separable metric space. Function
being a separable metric space. Function![]() , called a control, is taken from the set
, called a control, is taken from the set

Under some mild conditions, for any , (1.1) admits a unique weak solution
, (1.1) admits a unique weak solution  which is called the state(corresponding to the control
which is called the state(corresponding to the control![]() ). The performance of the control is measured by the cost functional
). The performance of the control is measured by the cost functional
 (1.2)
(1.2)
for some given map . Our optimal control problem can be stated as follows.
. Our optimal control problem can be stated as follows.
Problem (C). Find a  such that
such that
 (1.3)
(1.3)
And the state constraint of form:
 (1.4)
(1.4)
In this paper, we make the following assumptions.
(H1) Set  is a convex bounded domain with a smooth boundary
is a convex bounded domain with a smooth boundary .
.
(H2) Set  is a separable metric space.
is a separable metric space.
(H3) The function  has the following properties:
has the following properties:  is measurable on
is measurable on , and
, and  continuous on
continuous on  and for any
and for any , a constant
, a constant
 , such that
, such that 
(H4) Function is measurable in
is measurable in ![]() and continuous in
and continuous in for almost all
for almost all . Moreover, for any
. Moreover, for any , there exists a
, there exists a  such that
such that
 (1.5)
(1.5)
(H5)  is a Banach space with strictly convex dual
is a Banach space with strictly convex dual ,
,  is continuously Fréchet differentiable, and
is continuously Fréchet differentiable, and  is closed and convex set.
is closed and convex set.
(H6)  has finite condimensionality in
has finite condimensionality in  for some
for some , where
, where .
.
Definition 1.1 (see [1]) Let  is a Banach space and
is a Banach space and  is a subspace of
is a subspace of . We say that
. We say that  is finite codimensional in
is finite codimensional in  if there exists
if there exists  such that
such that
A subset ![]() of
of  is said to be finite codimensional in
is said to be finite codimensional in  if for some
if for some ,
,  the closed subspace spanned by
the closed subspace spanned by  is a finite codimensional subspace of
is a finite codimensional subspace of  and
and  the closed convex hull of
the closed convex hull of  has a nonempty interior in this subspace.
has a nonempty interior in this subspace.
Lemma 1.2. Let (H1) - (H3) hold. Then, for any , (1.1) admits a unique weak solution
, (1.1) admits a unique weak solution
 .
.
Furthermore, there exists a constant , independent of
, independent of
 (1.6)
(1.6)
The weak solution  of the state Equation (1.1) is determined by
of the state Equation (1.1) is determined by

using the bilinear form  given by
given by

Existence and uniqueness of the solution to (1.1) follow from the above hypotheses on the problem data (see [2]). Let  be the set of all pairs
be the set of all pairs  satisfying (1.1) and (1.4) is called an admissible set. Any
satisfying (1.1) and (1.4) is called an admissible set. Any  is called an admissible pair. The pair
is called an admissible pair. The pair
 , moveover satisfies
, moveover satisfies
for all  is called an optimal pair. If it exists, refer to
is called an optimal pair. If it exists, refer to ![]() and
and ![]() as an optimal state and control, respectively.
as an optimal state and control, respectively.
Now, let  be an optimal pair of Problem (C).
be an optimal pair of Problem (C).
Let  be the unique solution of the following problem:
be the unique solution of the following problem:
 (1.7)
(1.7)
And define the reachable set of variational system (1.7)
 (1.8)
(1.8)
Now, let us state the first order necessary conditions of an optimal control to Problem (C) as follows.
Theorem 1.3. (Pontryagin’s maximum principle) Let (H1) - (H6) hold. Let  be an optimal pair of Problem (C). Then there exists a triplet
be an optimal pair of Problem (C). Then there exists a triplet

such that
![]() (19)
(19)
 (1.10)
(1.10)
 (1.11)
(1.11)
where
(1.9), (1.10), and (1.11) are called the transversality condition, the adjoint system(along the given optimal pair), and the maximum condition, respectively.
Many authors (Dede [3], Yan [4], Becker [5], Stefano [6], Collis [7]) have already considered control problems for convection-diffusion equations from theoretical or numerical point of view. In the work mentioned above, the control set is convex. However, in many practical cases, the control set can not convex. This stimulates us to study Problem (C). To get Pontryagin’s Principle, we use a method based on penalization of state constraints, and Ekeland’s principle combined with diffuse perturbations [8].
In the next section, we will prove Pontryagin’s maximum principle of optimal control of Problem (C).
2. Proof of the Maximum Principle
This section is devoted to the proof of the maximum principle.
Proof of Theorem 1.3. Firstly, let
 where
where  is the Lebesgue measure of
is the Lebesgue measure of . We can easily prove that
. We can easily prove that  is a complete metric space. Let
is a complete metric space. Let  be anoptimal pair of Problem (C). For any
be anoptimal pair of Problem (C). For any  be the corresponding state, emphasizing the dependence on the control. Without loss of generality, we may assume that
be the corresponding state, emphasizing the dependence on the control. Without loss of generality, we may assume that . For any
. For any  define
define
 (2.1)
(2.1)
where , and
, and ![]() is an optimal control.
is an optimal control.
Clearly, this function is continuous on the (complete) metric space . Also, we have
. Also, we have
 (2.2)
(2.2)
Hence, by Ekeland’s variational principle, we can find a , such that
, such that
 (2.3)
(2.3)
Let  and
and  be fixed and let
be fixed and let , we know that for any
, we know that for any , there exists a measurable set
, there exists a measurable set  with the property
with the property  such that if we define
such that if we define
and let  be the corresponding state, then
be the corresponding state, then
 (2.4)
(2.4)
where  and
and  satisfying the following
satisfying the following
 (2.5)
(2.5)
 (2.6)
(2.6)
with
 (2.7)
(2.7)
We take . It follows that
. It follows that
 (2.8)
(2.8)
where

 denotes the subdifferential of
denotes the subdifferential of .
.
Next, we define  as follows:
as follows:
 (2.9)
(2.9)
By (2.1) and chapter 4 of [8], (2.8) becomes
 (2.10)
(2.10)
 (2.11)
(2.11)
On the other hand, by the definition of the subdifferential, we have
 (2.12)
(2.12)
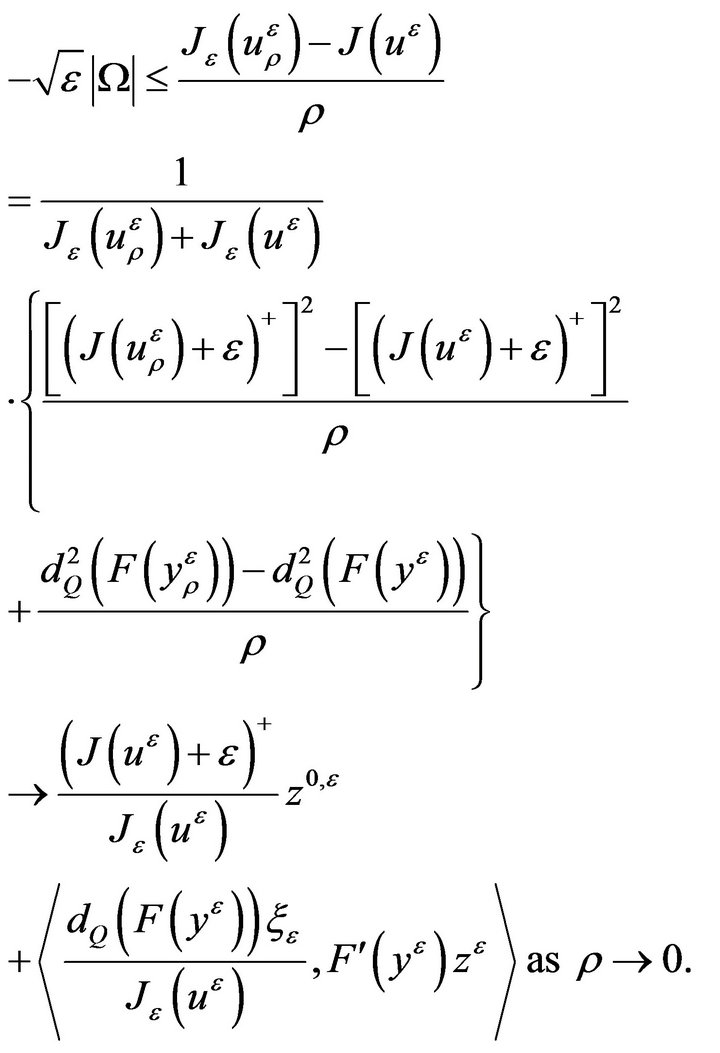
Next, from the first relation in (2.3) and by some calculations, we have
 (2.13)
(2.13)
Consequently,
 (2.14)
(2.14)
From (2.5) and (2.6), we have
 (2.15)
(2.15)
where  is the solution of system (1.7) and
is the solution of system (1.7) and
 (2.16)
(2.16)
From (2.10), (2.12) and (2.15), we have
 (2.17)
(2.17)
with  Because
Because  has finite condimensionality in
has finite condimensionality in , we can extract some subsequence, still denoted by itself, such that
, we can extract some subsequence, still denoted by itself, such that

From (2.17), we have
 (2.18)
(2.18)
Now, let
 .
.
Then
 .
.
Then we have
 (2.19)
(2.19)
Take , we obtain (1.9).
, we obtain (1.9).
Next, we let  to get
to get
 (2.20)
(2.20)
Because , for the given
, for the given , there exists a unique solution
, there exists a unique solution  of the adjoint Equation (1.10). Then, from (1.6), (2.16), and (2.2), we have
of the adjoint Equation (1.10). Then, from (1.6), (2.16), and (2.2), we have
 (2.21)
(2.21)
There, (1.11) follows. Finally, by (1.10), if  , then
, then . Thus, in the case where
. Thus, in the case where

we must have , because
, because .
.
3. Conclusion
We have already attained Pontryagin’s Maximum Principle for the advection-diffusion-reaction equation. It seems to us that this method can be used in treating many other relevant problems.
REFERENCES
- H. W. Lou and J. M. Yong, “Optimal Controls for Semilinear Elliptic Equations with Leaing Term Containing Controls,” SIAM Journal on Control and Optimization, Vol. 48, No. 4, 2009, pp. 2366-2387. doi:10.1137/080740301
- J. T. Oden and J. N. Reddy, “Variational Methods in Theoretical Mechanics,” Springer, Berlin and Heidelberg, 1983. doi:10.1007/978-3-642-68811-9
- L. Dede and A. Quarteroni, “Optimal Control and Numerical Adaptivity for Advection-Diffusion Equations,” Mathematical Modelling and Numerical Analysis, Vol. 39, No. 2, 2005, pp. 1019-1040.
- N. N. Yan and Z. J. Zhou, “A Priori and a Posteriori Error Analysis of Edge Stabilization Galerkin Method for the Optimal Control Problem Governed by Convection-Dominated Diffusion Equation,” Journal of Computational and Applied Mathematics, Vol. 223, No. 1, 2009, pp. 198-217. doi:10.1016/j.cam.2008.01.006
- R. Becker and B. Vexler, “Optimal Control of the Convection-Diffusion Equation Using Stabilized Finite Element Methods,” Numerische Mathematik, Vol. 106, No. 3, 2007, pp. 349-367. doi:10.1007/s00211-007-0067-0
- S. Micheletti and S. Perotto, “An Anisotropic Mesh Adaptation Procedure for an Optimal Control Problem of the Advection-Diffusion-Reaction Equation,” MOX-Report No. 15, 2008.
- S. S. Collis and M. Heinkenschloss, “Analysis of the Streamline Upwind/Petrov Galerkin Method Applied to the Solution of Optimal Control Problems,” Technical Report 02-01, Department of Computational and Applied Mathematics, Rice University, Houston, 2002.
- X. Li and J. Yong, “Optimal Control Theory for Infinite- Dimensional Systems,” Birkhäuser, Boston, 1995.
NOTES
*This work was partially supported by National Natural Science Foundation of China (Grant No. 11126170) and Hunan Provincial Natural Science Foundation of China (Grant No. 11JJ4006) and Ph.D startup Foundation of University of South China (Grant No 5-2011-XQD- 008).