Open Journal of Statistics
Vol.05 No.06(2015), Article ID:60515,8 pages
10.4236/ojs.2015.56057
Spectral Gradient Algorithm Based on the Generalized Fiser-Burmeister Function for Sparse Solutions of LCPS
Chang Gao, Zhensheng Yu, Feiran Wang
College of Science, University of Shanghai for Science and Technology, Shanghai, China
Email: gaochang45622@163.com
Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 27 August 2015; accepted 20 October 2015; published 23 October 2015
ABSTRACT
This paper considers the computation of sparse solutions of the linear complementarity problems LCP(q, M). Mathematically, the underlying model is NP-hard in general. Thus an lp(0 < p < 1) regularized minimization model is proposed for relaxation. We establish the equivalent unconstrained minimization reformation of the NCP-function. Based on the generalized Fiser-Burmeister function, a sequential smoothing spectral gradient method is proposed to solve the equivalent problem. Numerical results are given to show the efficiency of the proposed method.
Keywords:
Linear Complementarity Problem, Sparse Solution, Spectral Gradient, Generalized Fischer-Burmeister

1. Introduction
Given a matrix
 and an n-dimensional vector q, the linear complementarity problem, denoted by LCP(q, M), is to find a vector
and an n-dimensional vector q, the linear complementarity problem, denoted by LCP(q, M), is to find a vector
 such that
such that
 .
.
The set of solutions to this problem is denoted by . Throughout the paper, we always suppose
. Throughout the paper, we always suppose . The LCP has many wide applications in physics, engineering, mechanics, and economics design [1] [2] . Numerical methods for solving LCPs, such as the Newton method, the interior point method and the non-smooth equation methods, have been extensively investigated in the literature. However, it seems that there are few methods to solve the sparse solutions for LCPs. In fact, it is very necessary to research the sparse solution of the LCPs such as portfolio selection [3] [4] and bimatrix games [5] in real applications.
. The LCP has many wide applications in physics, engineering, mechanics, and economics design [1] [2] . Numerical methods for solving LCPs, such as the Newton method, the interior point method and the non-smooth equation methods, have been extensively investigated in the literature. However, it seems that there are few methods to solve the sparse solutions for LCPs. In fact, it is very necessary to research the sparse solution of the LCPs such as portfolio selection [3] [4] and bimatrix games [5] in real applications.
In this paper, we consider the sparse solutions of the LCP. We call
 a sparse solution of LCP (q, M) if
a sparse solution of LCP (q, M) if
 is a solution of the following optimization problem
is a solution of the following optimization problem
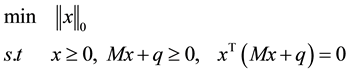 (1)
(1)
To be more precise, we seek a vector
 by solving the l0 norm minimization problem, where
by solving the l0 norm minimization problem, where
 stands for the number of nonzero components of x. A solution of (1) is called the sparsest solution of the LCP.
stands for the number of nonzero components of x. A solution of (1) is called the sparsest solution of the LCP.
Recently, Meijuan Shang, Chao Zhang and Naihua Xiu design a sequential smoothing gradient method to solve the sparse solution of LCP [6] . We inspire by the model and use the spectral method based on the generalized Fischer-Burmeister function to solve our new model (3). The spectral method is proposed by Barzilai and Borwein [7] and further analyzed by Raydan [8] [9] . The advantage of this method is that it requires little computational work and greatly speeds up the convergence of gradient methods. Therefore, this technique has received successful applications in unconstrained and constrained optimizations [10] -[13] .
In fact, the above minimization problem (1) is a sparse optimization with equilibrium constraints. From the problem of constraint conditions, as well as the non-smooth objective function, it is difficult to get solutions due to the equilibrium constraints to overcome the difficultly, and we use the NCP-functions to construct the penalty of violating the equilibrium constraints.
A function φ: R2 → R1 is called a NCP-function, if for any pair
 .
.
A popular NCP-functions is the Fischer-Burmeister (FB), which is defined as

The Fischer-Burmeister function has many interesting properties. However, it has limitations in dealing with monotone complementarity problems since it is too flat in the positive orthant, the region of main interest for a complementarity problem. In terms of the above disadvantage of the Fischer-Burmeister function, we consider the following generalized Fischer-Burmeister function [10] .
 (2)
(2)
where p is any fixed real number from
 and
and
 denotes the p-norm, i.e.
denotes the p-norm, i.e.

In other words, in the function , we replace the 2-norm of
, we replace the 2-norm of
 in the FB function
in the FB function
 by a more general p-norm of
by a more general p-norm of . The function
. The function
 is still an NCP-function.
is still an NCP-function.
Define
 by
by

where
 with
with
 and
and . Obviously,
. Obviously,
 if and only if
if and only if . By further employing the lp regularization term for seeking sparsity, we obtain the following unconstrained minimization problem to approximate
. By further employing the lp regularization term for seeking sparsity, we obtain the following unconstrained minimization problem to approximate
 (3)
(3)
where
 is a given regularization parameter, and
is a given regularization parameter, and
 for any 0 < p < 1. We call (3) as lp
for any 0 < p < 1. We call (3) as lp
regularized minimization problem.
Let us denote the first term of (3) by the function . That is
. That is
 (4)
(4)
For any given , the function
, the function
 is shown to possess all favorable properties of the FB function; we can see [8] . It plays an important part in our study throughout the paper. We observe in [14] [15] that P has a great influence on the numerical performance of certain descent-type methods; a larger P yields a better convergence rate, whereas a small P often gives a better global convergence.
is shown to possess all favorable properties of the FB function; we can see [8] . It plays an important part in our study throughout the paper. We observe in [14] [15] that P has a great influence on the numerical performance of certain descent-type methods; a larger P yields a better convergence rate, whereas a small P often gives a better global convergence.
The paper is organized as follows: In Section 2, we present absolute lower bounds for nonzero entries in local solution of (3). In section 3, we approximate the minimal zero norm solutions of the LCP. In section 4, we give a sequential smoothing spectral gradient method to solve the model. In Section 5, numerical results are given to demonstrate the effectiveness of the sequential smoothing spectral gradient method.
2. The lp Regularized Approximation
In this section, we consider the minimizers of (3). We study the relation between the original model (1) and the lp regularized model (3), which indicates the regularized model is a good approximation. We use a threshold lower bound L [6] for nonzero entries in local minimizers and the choice of the lp minimization problem (3).
2.1. Relation between (3) and (1)
The following result is given in [6] , which is essentially based on some results given by Chen Xiaojun [14] .
Lemma 2.1. [6] for any fixed
 the solution set of (3) is nonempty and bounded. Let
the solution set of (3) is nonempty and bounded. Let
 be a solution
be a solution
of (3), and
 be any positive sequence converging to 0. If
be any positive sequence converging to 0. If , then
, then
 has at least one accumulation point, and any accumulation point
has at least one accumulation point, and any accumulation point
 of
of
 is a solution of (3). That is, for any
is a solution of (3). That is, for any
 satisfied
satisfied
 and
and .
.
2.2. Lower Bounds for Nonzero Entries in Solutions
In this section, we extend the above result to the lp norm regularization model (2) for approximating minimal l0 norm solutions of the LCP. We provide a threshold lower bound L > 0 for any local minimizer, and show
that any nonzero entries of local minimizers must exceed L. Since , the objective function
, the objective function

is bound below and
 if
if . Moreover, the set
. Moreover, the set
 of local minimizers of (3) is nonempty and bounded.
of local minimizers of (3) is nonempty and bounded.
Lemma 2.2. [6] let
 be any local minimizer of (3) satisfying
be any local minimizer of (3) satisfying
 for an arbitrarily given point
for an arbitrarily given point . Set
. Set
 (5)
(5)
Then we have: for any .
.
Moreover, the number of nonzero entries in
 is bounded.
is bounded.

Let us denote the first term of (3) by the function . That is
. That is
 (6)
(6)
First we present some properties of
 and
and .
.
Lemma 2.3. [12] let
 be given by (3). Then, the following properties hold:
be given by (3). Then, the following properties hold:
1)
 is a positive homogeneous and sub-additive NCP-function.
is a positive homogeneous and sub-additive NCP-function.
2)
 is strongly semismooth.
is strongly semismooth.
3) If
 with
with , or
, or , or
, or ,
,
 , then
, then

when .
.
4) Given a point , very element in the generalized gradient
, very element in the generalized gradient
 has the representation
has the representation , where
, where
 and for
and for
sgn(.) represents the sign function;
 and
and
 are real numbers that satisfy
are real numbers that satisfy .
.
Theorem 2.1. The function
 is continuously differentiable everywhere and the gradient of
is continuously differentiable everywhere and the gradient of
 can be obtained by
can be obtained by
 (7)
(7)
where
 and
and
 are diagonal matrices whose diagonal element is giv-
are diagonal matrices whose diagonal element is giv-
en by


where
 is any vector satisfying
is any vector satisfying .
.
3. Smoothing Method for lp Regularization
Most optimization algorithms are efficient only for convex and smooth problems. However, some algorithms for
Non-smooth and non-convex optimization problems have been developed recently. Note that the term
 (0 <
(0 <
p < 1) in (3) is neither convex nor Lipschitz continuous in . Solving the non-convex, non-Lipschitz continuous minimization problem is not easy. We use some approximation methods to surmount the non-Lipschitz continuity problem in solving (3).
. Solving the non-convex, non-Lipschitz continuous minimization problem is not easy. We use some approximation methods to surmount the non-Lipschitz continuity problem in solving (3).
Smoothing Counterpart for (3)
For , let
, let
 (8)
(8)
It is clear to see that, for any ,
,

and
 is continuously differentiable with
is continuously differentiable with

We can construct a smoothing approximation of (2) as
 (9)
(9)
by noting that
 is continuously differentiable, and
is continuously differentiable, and
 since
since
 (10)
(10)
for any .
.
Let
 denote the set of local minimizers of (10). We have the similar results as in Lemmma 2.1 and 2.2, corresponding to the smoothing counterpart (10).
denote the set of local minimizers of (10). We have the similar results as in Lemmma 2.1 and 2.2, corresponding to the smoothing counterpart (10).
Theorem 3.1. Let
 be a sequence of vectors being global minimizers of (10) with
be a sequence of vectors being global minimizers of (10) with
 as
as .
.
Then, any accumulation point of
 is a global minimizer of (3).
is a global minimizer of (3).
Proof. Let
 be a global minimizer of (3) and
be a global minimizer of (3) and
 be an accumulation point of
be an accumulation point of .
.
We can deduce from (11) that

On the other hand, we have , and consequently
, and consequently

Which indicates
 is a global minimizer of (3).
is a global minimizer of (3).
Lemma 3.2. [6] for any , let
, let
 be any local minimizer of (14) satisfying
be any local minimizer of (14) satisfying
 for an arbitrarily given initial points
for an arbitrarily given initial points . Let L be defined in Lemma 2.2. Then, we have for any
. Let L be defined in Lemma 2.2. Then, we have for any

4. SS-SG Algorithm
We suggest a sequential Smoothing Spectral Gradient (SS-SG) Method to solve (3). With the SS-SG method, we need the Spectral Gradient method as the main step for decreasing the objective value. The smoothing method is very easy to implement and efficient to deal with optimization; see [15] .
We first introduce the spectral projected gradient method in [8] as follow.
Algorithm 1. Smoothing Spectral Gradient Method
Step 0: Choose an initial point , and parameters
, and parameters ,
,
 ,
, . Let
. Let ,
,
 ,
, .
.
Step1: Let ,
,
 ,
,
 where
where ,
, . If
. If
 , then stop.
, then stop.
Step 2: Compute the step size
 by the Armijo line search, where
by the Armijo line search, where
 satisfies
satisfies

Set .
.
Step 3: If , then set
, then set ; otherwise, choose
; otherwise, choose .
.
Algorithm 2. Sequential Smoothing Spectral Gradient Method
Step 1: Find
 by using the algorithm 1 to solve
by using the algorithm 1 to solve

Step 2: Compute

Use the lower bound
 to set the entries of
to set the entries of
 with small values to zeros and obtain the computed solution
with small values to zeros and obtain the computed solution
 with
with

Step 3: Decrease the parameter
 and set
and set .
.
5. Numerical Experiments
In this section, we test some numerical experiments to demonstrate the effectiveness of our SG algorithm. In order to illustrating the effectiveness of the SS-SG algorithm we proposed, we introduce another algorithm of talking the LCPs. In [6] , the authors designed a sequential smoothing (SSG) method to solve the lp regularized model and get a sparse solution of LCP(q, M). Numerical experiments show that our algorithm is more effective than (SSG) algorithm.
The program code was written in and run in MATLAB R2013 an environment. The parameters are chooses as ,
,
 and
and . The maximum number of iterations in step 1 is set to be 2000. We end the SS-SG algorithm in Step 1, if
. The maximum number of iterations in step 1 is set to be 2000. We end the SS-SG algorithm in Step 1, if
 and
and , or it reaches the maximum number of iterations.
, or it reaches the maximum number of iterations.
5.1. Test for LCPs with Positive Semidefinite Matrices
Example 1. We consider the LCP(q, M) with

The solution set is .
.
When , the vector
, the vector
 is the sparse solution of LCP(q, M). We choose P = 10, p = 0.1 in (3) for this small example, and use our SS-SG algorithm with the regularization parameter
is the sparse solution of LCP(q, M). We choose P = 10, p = 0.1 in (3) for this small example, and use our SS-SG algorithm with the regularization parameter . We use the initial point
. We use the initial point , we get a minimal
, we get a minimal
 norm solution
norm solution
 and the distance
and the distance
 .
.
Example 2. We consider the LCP(q, M) with

The solution set is

When , the vector
, the vector
 is the sparse solution of LCP(q, M). When
is the sparse solution of LCP(q, M). When , the vector
, the vector
 is the sparse solution of LCP(q, M). We choose the same parameters as Example 1. We use the initial point
is the sparse solution of LCP(q, M). We choose the same parameters as Example 1. We use the initial point , we get a minimal
, we get a minimal
 norm solution
norm solution
 and the distance
and the distance
 . We use the initial point
. We use the initial point , we get a minimal
, we get a minimal
 norm solution
norm solution
 and the distance
and the distance .
.
These examples show that, given the proper initial point, our algorithm can effectively find an approximate sparse solution.
5.2. Test for LCPs with Z-Matrix [6]
Let us consider LCP(q, M) where
 and
and
Here
 is the identity matrix of order n and
is the identity matrix of order n and . Such a matrix M is widely used in statistics. It is clear that Mis a positive semidefinite Z-matrix. For any scalar
. Such a matrix M is widely used in statistics. It is clear that Mis a positive semidefinite Z-matrix. For any scalar , we know that the vector
, we know that the vector
 is a solution to LCP(q, M), since it satisfies that
is a solution to LCP(q, M), since it satisfies that

Among all the solutions, the vector
 is the unique sparsest solution. We test the SS-SG algorithm for different dimensions with n = 100, 300, 500, 1000, 1300, respectively. In this set of experiments, we set
is the unique sparsest solution. We test the SS-SG algorithm for different dimensions with n = 100, 300, 500, 1000, 1300, respectively. In this set of experiments, we set .The results are displayed in Table 1.
.The results are displayed in Table 1.
In Table 1, “ ” denotes the Euclidean distance between
” denotes the Euclidean distance between
 and the true sparsest
and the true sparsest , and “time” denotes the computational time in seconds. Form Table 1, we can see that the SS-SG algorithm is effective to find the sparse solution of LCPs.
, and “time” denotes the computational time in seconds. Form Table 1, we can see that the SS-SG algorithm is effective to find the sparse solution of LCPs.
In order to test the effectiveness of the SS-SG algorithm, we compare with the SSG algorithm of talking the LCPs. In [10] , the authors use the Fiser-Burmeister function established a lp (0 < p < 1) regularized minimization model and designed a SSG method to solve the LCPs. The results are displayed in Table 2, where “_” denotes the method is invalid. Although the sparsity
 is same and the recovered errors
is same and the recovered errors
 are pretty small, the average cpu time less than the SSG algorithm.
are pretty small, the average cpu time less than the SSG algorithm.

Table 1. SS-SG’s computation results on LCPs with Z-matrices.
Table 2. SSG’s computation results on LCPs with Z-matrices.
6. Conclusion
In this paper, we have studied a lp (0 < p < 1) model based on the generalized FB function defined as in (2) to find the sparsest solution of LCPs. Then, an lp normregularized and unconstrained minimization model is proposed for relaxation, and we use a sequential smoothing spectral gradient method to solve the model. Numerical results demonstrate that the method can efficiently solve this regularized model and gets a sparsest solution of LCP with high quality.
Acknowledgements
This work is supported by Innovation Programming of Shanghai Municipal Education Commission (No. 14YZ094).
Cite this paper
ChangGao,ZhenshengYu,FeiranWang, (2015) Spectral Gradient Algorithm Based on the Generalized Fiser-Burmeister Function for Sparse Solutions of LCPS. Open Journal of Statistics,05,543-551. doi: 10.4236/ojs.2015.56057
References
- 1. Facchinei, F. and Pang, J.S. (2003) Finite-Dimensional Variational Inequalities and Complementarity Problems. Springer Series in Operations Research, Vol. I & II, Springer, New York.
- 2. Ferris, M.C., Mangasarian, O.L. and Pang, J.S. (2001) Complementarity: Applications, Algorithms and Extensions. Kluwer Academic Publishers, Dordrecht.
- 3. Gao, J.D. (2013) Optimal Cardinality Constrained Portfolio Selection. Operations Research, 61, 745-761.
http://dx.doi.org/10.1287/opre.2013.1170 - 4. Xie, J., He, S. and Zhang, S. (2008) Randomized Portfolio Selection with Constraints. Pacific Journal of Optimization, 4, 87-112.
- 5. Cottle, R.W., Pang, J.S. and Stone, R.E. (1992) The Linear Complementarity Problem. Academic Press, Boston.
- 6. Shang, M.J., Zhang, C. and Xiu, N.H. (2014) Minimal Zero Norm Solutions of Linear Complementarity Problems. Journal of Optimization Theory and Applications, 163, 795-814.
http://dx.doi.org/10.1007/s10957-014-0549-z - 7. Barzilai, J. and Borwein, J.M. (1988) Two Point Step Size Gradient Method. IMA Journal of Numerical Analysis, 8, 174-184.
http://dx.doi.org/10.1093/imanum/8.1.141 - 8. Raydan, M. (1997) The Barzilai-Borwein Gradient Method for the Large Scale Unconstrained Optimization Problem. SIAM Journal on Optimization, 7, 26-33.
http://dx.doi.org/10.1137/S1052623494266365 - 9. Raydan, M. (1993) On the Barzilai and Borwein Choice of Step Length for the Gradient Method. IMA Journal of Numerical Analysis, 13, 321-326.
http://dx.doi.org/10.1093/imanum/13.3.321 - 10. Chen, J.-S. and Pan, S.-H. (2010) A Neural Network Based on the Generalized Fischer-Burmeister Function Fornonlinear Complementarity Problem. Information Sciences, 180, 697-711.
http://dx.doi.org/10.1016/j.ins.2009.11.014 - 11. Chen, J.-S. and Pan, S.-H. (2008) A Family of NCP Functions and a Descent Method for the Nonlinear Complementarity Problem. Computation Optimization and Application, 40, 389-404.
http://dx.doi.org/10.1007/s10589-007-9086-0 - 12. Chen, J.-S. and Pan, S.-H. (2008) A Regularization Semismooth Newton Method Based on the Generalized Fischer-Burmeister Function for P0-NCPs. Journal of Computation and Applied Mathematics, 220, 464-479.
http://dx.doi.org/10.1016/j.cam.2007.08.020 - 13. Chen, J.-S., Gao, H.-T. and Pan, S.-H. (2009) A Derivative-Free R-Linearly Convergent Derivative-Free Algorithm for the NPCs Based on the Generalized Fischer-Burmeister Merit Function. Journal of Computation and Applied Mathematics, 232, 455-471.
- 14. Chen, X.J., Xu, F. and Ye, Y. (2010) Lower Bound Theory of Nonzero Entries in Solutions of l2-lp Minimiization. SIAM: SIAM Journal on Scientific Computing, 32, 2832-2852.
http://dx.doi.org/10.1137/090761471 - 15. Chen, X. and Xiang, S. (2011) Implicit Solution Function of P0 and Z Matrix Linear Complementarity Constrains. Mathematical Programming, 128, 1-18.
http://dx.doi.org/10.1007/s10107-009-0291-8