 Vol.2, No.6, 425-430 (2009) doi:10.4236/jbise.2009.26061 SciRes Copyright © 2009 Openly accessible at http://www.scirp.org/journal/JBISE/ JBiSE Unsupervised human height estimation from a single image Ye-Peng Guan1,2 1School of Communication and Information Engineering, Shanghai University, Shanghai, China; 2Key Laboratory of Advanced Dis- plays and System Application, Ministry of Education, Shanghai, China. Email: ypguan@shu.edu.cn Received 15 May 2008; revised 16 June 2009; accepted 17 June 2009. ABSTRACT The single image containing only a human face not previously addressed in the literature is employed to estimate body height. The human face especially the facial vertical distribution possesses some important information which strongly correlates with the stature. The vertical proportions keep up relative constancy during the human growth. Only a few facial features such as the eyes, the lip and the chin are nec- essary to extract. The metric stature is esti- mated according to the statistical measurement sets and the facial vertical golden proportion. The estimated stature is tested with some indi- viduals with only a single facial image. The per- formance of the proposed method is compared with some similar methods, which shows the proposal performs better. The experimental re- sults highlight that the developed method esti- mates stature with high accuracy. Keywords: Human Height Estimation; Golden Proportion; Facial Proportion; Feature Extraction; Projection Model 1. INTRODUCTION Human height estimation has many important applica- tions such as soft-biometrics and human tracking [1]. In the first case, the stature can be used to rule out the pos- sibility that a particular person is the same person from the surveillance cameras [2,3]. In the latter case, it can be exploited to distinguish among a small set of tracked people in the scene [1,4,5,6,7]. The stature, therefore, may become a very useful identification feature. In the cases with two or more images, the stature estimation by stereo matching is computationally expensive and there exists ambiguity being resident in the stereo correspon- dence, which is not overcome efficiently so far [8,9,10]. In the case of only one image available, the stature measurement from single image has to be performed. Many single view based approaches are proposed based on some geometric structures or models [1,2,3,4,5,6, 7,11,12,13,14,15,16]. In [1,2,3,4,5,6,7,12,13,14,15,16], plane metrology algorithms based on vanishing points and lines are developed to measure distances or lengths on the planar surfaces parallel to the reference plane. Any slight inaccuracy in measuring vanishing points will result in large errors [2,17]. Reference points defining the top and bottom of the object should be clear and unambiguous. Besides, reference objects must be in the same plane as the target object. Moreover, the full body of the user must be visible in measuring the stature. In [11], BenAbdelkader and Yacoob incorporated some certain statistical properties of human anthropometry into the statu re estimation . It would be difficult to obtain the stature when some anthropometric values such as acromion and trapezius (or neck) are not available. Be- sides, if the whole body and/or the facial plane are at an angle with respect to the camera, the weak perspective assumption cannot be exploited. Although many single view based approaches have been proposed, there exist some problems in the litera- ture. In order to improve both validation and automation of the procedure, we have developed an approach to es- timating the stature with the following advantages. 1) The used image contains only the human face not previ- ously addressed in the literature. The human face espe- cially the facial vertical distribution owns some impor- tant information which strongly correlates with the stat- ure [18]. The facial vertical proportion used is based on the golden pr oportion [1 9,20]. A number of investigators have commented on the relative constancy of the facial vertical proportions during the human growth [21]. 2) Only a few facial features are necessary to extract, and the procedure is processed automatically by image analysis operators. 3) The extracted facial features and the facial vertical proportions are used together to esti- mate the stature. The estimated resu lt is tested with so me individuals with only a facial image, showing high esti-  Y. P. Guan / J. Biomedical Science and Engineering 2 (2009) 425-430 SciRes Copyright © 2009 Openly accessible at http://www.scirp.org/journal/JBISE/ 426 mation accuracy, which validates the developed ap- proach to be objective, and can be taken as an automated tool for estimating th e stature. The potential applications of this work include biometric diagnoses, user authenti- cation, smart video surveillance, human-machine inter- face, human tracking, athletic sports analysis, virtual reality, and so on. The rest of the paper is organized as follows: Section 2 describes the facial proportions used for estimating the stature. Section 3 discusses the face detection and the facial features extraction. Section 4 describes the stature estimation based on a calibrated camera. Experimental results and evaluation of the performance are given in Section 5 and followed by some conclusions and future works in Section 6. 2. FACIAL PROPORTIONS All living organisms including humans are encoded to develop and confirm to a certain proportion [20]. The human face especially the facial vertical proportion owns some important information which correlates with the stature [18]. The facial vertical proportions include the golden proportion [19,20] and the facial thirds method [22,23]. The facial golden proportion is ap- proximately the ratio of 1.618 to 1 as shown in Figure 1. It states that the human face may be divided into a golden proportion distribution by drawing horizontal lines through the forehead hairline, the nose, and the chin, or through the eyes, the lip, and the chin. The facial thirds method states that the face may be divided into roughly equal a third by drawing horizontal lines through the forehead hairline, the eyebrows, the base of the nose, and the edge of the chin as shown in Figure 2. Besides, the distance between the lip and the chin is double the distance between the base of the nose and the lip [22,23]. The golden proportion and the facial third s are similar to each other. The former specifies a larger number of proportions than the latter. They used some different features so that they cannot be directly compared [19]. By experiments it shows that the accuracy of stature estimated by the golden proportion is more consistent with the ground-truth data than that of by the facial thirds. Figure 1. Facial vertical golden proportion Figure 2. Facial vertical thirds proportion Figure 3. Face detection and facial features extraction results. A: origi- nal image. B: extracted binary foreground. C: extracted foreground ob- ject. D: extracted binary blob. E: resulting image from horizontal edge detection. F: horizont a l lo cations of the eyes, the lip and chin lines.  Y. P. Guan / J. Biomedical Science and Engineering 2 (2009) 425-430 SciRes Copyright © 2009 Openly accessible at http://www.scirp.org/journal/JBISE/ 427 3. FOREGROUND DETECTION AND FACIAL FEAT URE E XTRACTION Robust and efficient extraction of foreground object from image sequences is a key operation. Many algo- rithms have been developed [24,25,26]. The algorithm proposed in [26] is employed to extract foreground blob as shown in Figure 3B. After extracting the foreground objects, accurate facial features extraction is important for reliable estimation of the stature. A number of meth- ods have been developed for extracting facial features [27,28,29]. Among the facial features such as the eyes, nose, lip, chin, and so on, the eyes are one of the most important facial features [30,31]. Since effective auto- matic location and tracking of a person’s forehead hair- line is difficult, we select the eyes, lip, and the chin as the facial features used in the study. The first step consists of locating the facial region to remove irrelevant information. Human skin color, though differs widely from person to person, is distrib- uted over a very small area on a CbCr plane [32,33]. This model is robust against different types of skin, such as those of people from Europe, Asia and Africa. The skin tone pixels are detected using the Cb and Cr components. Let the threshold s be chosen as [Cb1, Cb2] and [Cr1, Cr2], a pixel is classified to skin tone if th e values [Cb, Cr] fall within the thresholds. Each pixel in the Cb and Cr layer which does not meet the range [Cb, Cr] is set to zero. In some cases, the obtained mask has concavities or spikes as shown in Figure 3D, which affects the facial features location. We use the algorithm in [34] to process this problem. There are many fairly long horizontal edges near the facial features. In order to make the edge detector be- haves more stable, we transform the intensity of the im- age into a second derivate and then horizontally project it to determine the horizontal positions of facial features [34] (seen from Figure 3E). The positions of peaks in the horizontal projection curve correspond with the horizontal facial features including the eyes, nose and lip. Horizontal transition is stronger at the lip than at the eyes in some cases. The lip can be detected in hue/satu- ration color space [35]. We detect the peak with a maxi- mal value above th e lip as the horizontal position of eyes. In the meantime, the chin is automatically located be- tween the lip and the neck . Th e horizon tal locatio n of th e eyes, lip and chin is g iven in Figure 3F. 4. STATURE ESTIMATION Stature estimation is discussed here to highlight the use of the extracted facial features. Assume the person stands or walks on a plane and a camera is calibrated with respect to this plane. We compute 3D position of the extracted facial features according to the golden proportion. Since the facial vertical proportions keep relative constant during the human growth [21], the 3D position of the extracted facial features can be deter- mined if a certain length or distance is known. More detailed metric description of the head and face was recognized quite early. Major U.S. surveys, those in which large numbers of measurements have been made on samples of a thousand or more individuals, have been carried out on military p ersonnel [18]. The measurement device could provide a sensitivity of less than 0.01 mm in each axis, and the accuracy with the order of 0.1 mm could be achieved [36]. Shiang [18] has made extensive 3D statistical work of human head and face also. Ac- cording to the measurement sets the metric stature can be estimated based on the calibrated camera. The camera model used is a central projection. Effect such as radial distortion can be removed and is not det- rimental to the method. The camera perspective projec- tion model can be represented by a 34 matrix M. The image coordinates (ui, vi) of a point Pi expressed in a homogenous coordinate system are given as follows: 1 134333231 24232221 14131211 i i i i i iZ Y X mmmm mmmm mmmm v u s (1) When estimating the stature, we assume that depth difference among the eyes, lip and the chin is n egligible. For simplifying computation, assume that the 3D coor- dinates of the chin point (u1, v1) is (X, Y, Z) whose hori- zontal line intersects with the vertical line through the center of the eyes. The coordinates of the lip point (u2, v2) is (X, Y, Z+h) whose horizontal line intersects with the same vertical line as above. According to the golden proportion the coord inates of the center of the eyes point (u3, v3) is (X, Y, Z+2.618h). If h, the height between the chin and the lip is known, (1 ) can be used to infer the 3D coordinate of the chin point. Expending the (X, Y, Z) gives as follows: X Y Z B (2) where, 13111 1321213313 13121 1322213323 23111 23212 23313 2 31212 32222 3323 3 31113 32123 3313 3 31213 32223 3323 um mummumm vm mvmmvmm um m ummumm Avm m vm mvm m um m um mum m vm mvmmvmm (3) 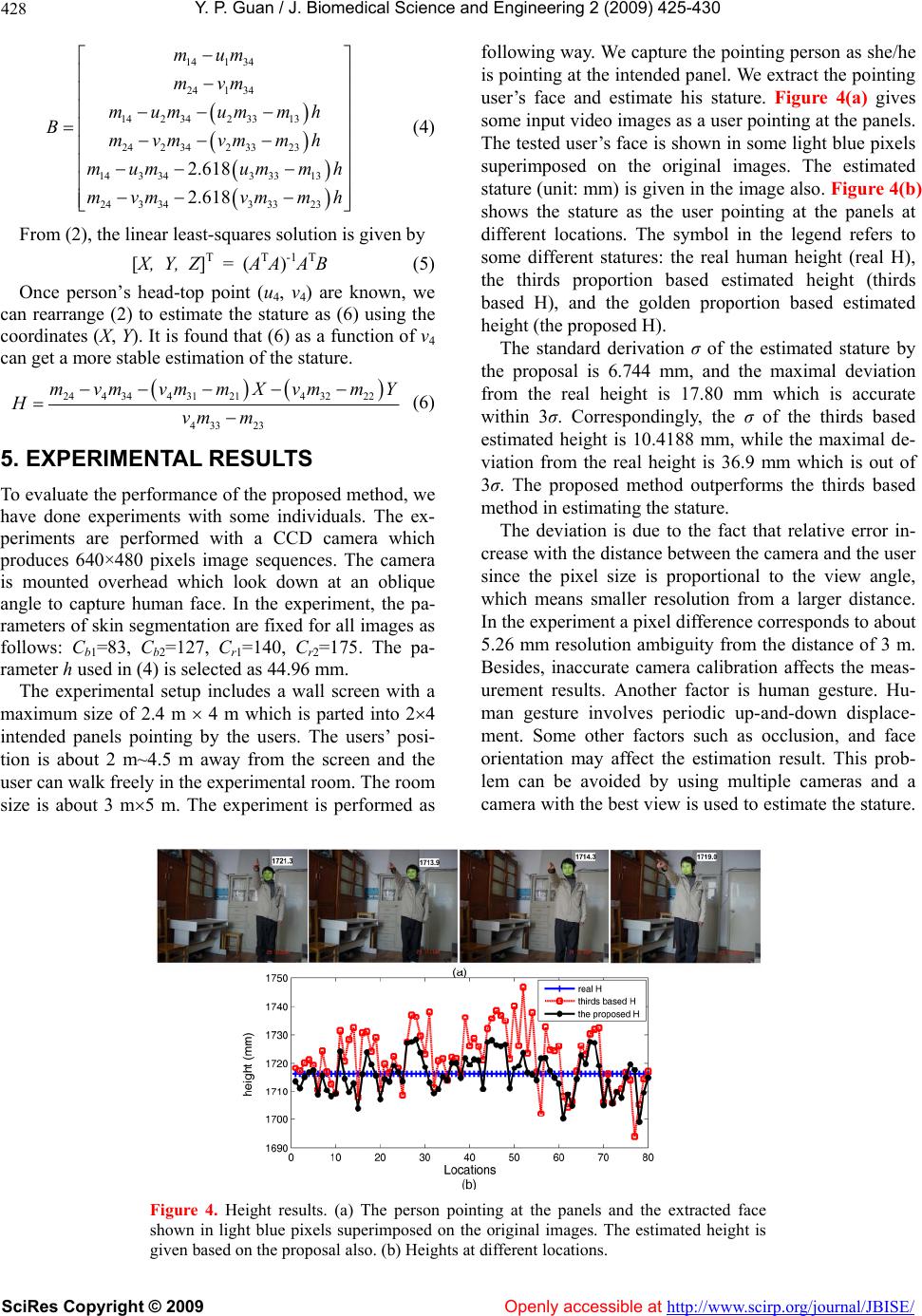 Y. P. Guan / J. Biomedical Science and Engineering 2 (2009) 425-430 SciRes Copyright © 2009 Openly accessible at http://www.scirp.org/journal/JBISE/ 428 141 34 241 34 142 342 3313 242 342 3323 143 343 3313 2433433323 2.618 2.618 mum mvm mum ummh Bmvm vmmh mumummh mvmvmmh (4) From (2), the linear least-squares solution is given by [X, Y, Z]T = (ATA)-1ATB (5) Once person’s head-top point (u4, v4) are known, we can rearrange (2) to estimate the stature as (6) using the coordinates (X, Y). It is found that (6) as a function of v4 can get a more stable estimation of the stature. 244344 31214 3222 433 23 mvm vmmXvmmY Hvm m (6) 5. EXPERIMENTAL RESULTS To evaluate the performance of the proposed method, we have done experiments with some individuals. The ex- periments are performed with a CCD camera which produces 640×480 pixels image sequences. The camera is mounted overhead which look down at an oblique angle to capture human face. In the experiment, the pa- rameters of skin segmentation are fixed for all images as follows: Cb1=83, Cb2=127, Cr1=140, Cr2=175. The pa- rameter h used in (4) is selected as 44.96 mm. The experimental setup includes a wall screen with a maximum size of 2.4 m 4 m which is parted into 24 intended panels pointing by the users. The users’ posi- tion is about 2 m~4.5 m away from the screen and the user can walk freely in the experimental room. The room size is about 3 m5 m. The experiment is performed as following way. We capture the pointing person as she/he is pointing at the intended panel. We extract the pointing user’s face and estimate his stature. Figure 4(a) gives some input video images as a user pointing at the panels. The tested user ’s face is shown in some light blue pixels superimposed on the original images. The estimated stature (unit: mm) is give n in the image also. Figure 4(b) shows the stature as the user pointing at the panels at different locations. The symbol in the legend refers to some different statures: the real human height (real H), the thirds proportion based estimated height (thirds based H), and the golden proportion based estimated height (the proposed H). The standard derivation σ of the estimated stature by the proposal is 6.744 mm, and the maximal deviation from the real height is 17.80 mm which is accurate within 3σ. Correspondingly, the σ of the thirds based estimated height is 10.4188 mm, while the maximal de- viation from the real height is 36.9 mm which is out of 3σ. The proposed method outperforms the thirds based method in estimating the stature. The deviation is due to the fact that relative error in- crease with the distance between the camera and the user since the pixel size is proportional to the view angle, which means smaller resolution from a larger distance. In the experiment a pixel difference corresponds to about 5.26 mm resolution ambiguity from the distance of 3 m. Besides, inaccurate camera calibration affects the meas- urement results. Another factor is human gesture. Hu- man gesture involves periodic up-and-down displace- ment. Some other factors such as occlusion, and face orientation may affect the estimation result. This prob- lem can be avoided by using multiple cameras and a camera with the best view is used to estimate the statur e. Figure 4. Height results. (a) The person pointing at the panels and the extracted face shown in light blue pixels superimposed on the original images. The estimated height is given based on the proposal also. (b) Heights at different locations.  Y. P. Guan / J. Biomedical Science and Engineering 2 (2009) 425-430 SciRes Copyright © 2009 Openly accessible at http://www.scirp.org/journal/JBISE/ 429 Table 1. Height estimation results. Tested object 1 2 3 4 AM MD AM MD AM MD AM MD Kim [7] 1817.2 5.12 10.77 1708.2 8.56 15.34 1668.5 6.45 15.36 1653.6 6.75 15.75 Wang [12] 1820.4 7.35 20.65 1722.4 10.56 26.74 1685.4 8.34 23.74 1664.5 9.26 26.51 Lee [15] 1818.5 6.45 17.34 1720.6 9.78 22.58 1682.8 7.67 22.46 1663.7 8.78 25.12 Proposed 1813.6 4.89 8.90 1715.4 8.78 15.56 1672.3 6.16 15.13 1647.3 6.69 14.90 lgorithm We hope to discuss it in the future. The processing speed of the proposal is roughly 15frames/s for a single object and frontal face in the scen e. To verify the effectiveness of the mentioned approach, we have performed experiments with some moving indi- viduals. The performance of the proposal for four tested individuals with known stature is compared with that of some similar methods [7,12,15] shown in Table 1. Table 1 summarizes the average measurement (AM) stature, the standard derivation (σ), and the maximal derivation (MD) for each tested object. It is clearly seen that the developed approach performs better. 6. CONCLUSIONS AND FUTURE WORKS We have developed unsupervised single view based method for robust and real-time estimating the stature. The image contains only a face or upper body little dis- cussed in the literature. Only a few facial features such as the eyes, lip and chin are necessary to extract. The metric stature is estimated according to the statistical measurement sets and the facial vertical golden propor- tion. The estimated stature is tested with some individu- als with only a facial image, showing high accuracy, which validates the proposal to be objective, and can be taken as an automated tool for estimating the stature. Extension to un-calibrated scenario case would be de- veloped in the future. 7. ACKNOWLEDGEMENTS This work in part is supported by the National Natural Science Foun- dation of China (Grant No. 60872117). REFERENCES [1] C. Ben-Abdelkader, R. Cutler, and L. S. Davis, (2002) Person identification using automatic height and stride estimation, Proceedings of 16th International Conference on Pattern Recognition, 4, 377–380. [2] A. Criminisi, (2002) Single-view metrology: Algorithms and applications, Proceedings of 24th DAGM Sympo- sium on Pattern Recognition, 224–239. [3] N. Saitoh, K. Kurosawa, and K. Kuroki, (1999) A study on height measurement from a single view, Proceedings of International Conference on Image Processing, 3, 523–526. [4] A. Bovyrin and K. Rodyushkin, (2005) Human height prediction and roads estimation for advanced video sur- veillance systems, Proceedings of IEEE Conference on Advanced Video and Signal-Based Surveillance, 219– 223. [5] C. S. Madden and M. Piccardi, (2005) Height measure- ment as a session-based biometric, Proceedings of Image and Vision Computing New Zealand, 282–286. [6] D. De Angelis, R. Sala, A. Cantatore, P. Poppa, M. Du- four, M. Grandi, and C. Cattaneo, (2007) New method for height estimation of subjects represented in photo- grams taken from video surveillance systems, Interna- tional Journal of Legal Medicine, 121(6), 489–492. [7] D. Kim, J. Lee, H. -S.Yoon, and E. -Y. Cha, (2007) A non-cooperative user authentication system in robot en- vironments, IEEE Trans. Consumer Electronics, 53(2): 804–811. [8] L. Zhang, (2006) Fast stereo matching algorithm for intermediate view reconstruction of stereoscopic televi- sion images, IEEE Trans. Circuits and Systems for Video Technology, 16(10), 1259–1270. [9] F. Remondino, S. F. El-Hakim, A. Gruen, and L. Zhang, (2008) Turning images into 3-D models, IEEE Signal Processing Magazi ne , 25(4), 55–65. [10] W. Xiong, H. S Chung, and J. Jia, (2009) Fractional ste- reo matching using expectation-maximization, IEEE Trans. Pattern Analysis and Machine Intelligence, 31(3), 428–443. [11] C. Ben Abdelkader and Y. Yacoob, (2008) Statistical body height estimation from a single image, Proceedings of 8th IEEE International Conference on Automatic Face and Gesture Recognition, 1–7. [12] R. Wang and F. P. Ferrie, (2008) Self-calibration and metric reconstruction from single images, Proceeding of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 639–644. [13] L. Fengjun, Z. Tao, and R. Nevatia, (2002) Self-cali- bration of a camera from video of a walking human, Pro- ceedings of 16th International Conference on Pattern Recognition, 1, 562–567. [14] Y. Kida, S. Kagami, T. Nakata, M. Kouchi, and H. Mizoguchi, (2004) Human finding and body property es- timation by using floor segmentation and 3D labeling, Proceedings of IEEE International Conference on Sys- tems, Man and Cybernet i c s , 3, 2924–2929. [15] S. -H. Lee and J. -S. Choi, (2007) A single-view based framework for robust estimation of height and position of moving people, Proceedings of Pacific-Rim Symposium on Image and Video Technolog y, 562–574.  Y. P. Guan / J. Biomedical Science and Engineering 2 (2009) 425-430 SciRes Copyright © 2009 Openly accessible at http://www.scirp.org/journal/JBISE/ 430 [16] E. Jeges, I. Kispal, and Z. Hornak, (2008) Measuring human height using calibrated cameras, Proceedings of Conference on Human System Interactions, 755–760. [17] A. Criminisi, I. Reid, and A. Zisserman, (1999) Single view metrology, Proceedings of 7th International Con- ference on Computer Vision, 434–442. [18] T. -Y. Shiang, (1999) A statistical approach to data analy- sis and 3-D geometric description of the human head and face, Proceedings of the National Science Council, Re- public of China, Part B, Life Sciences, 23(1), 19–26. [19] H. Gunes and M. Piccardi, (2006) Assessing facial beauty through proportion analysis by image processing and supervised learning, International Journal of Hu- man-Computer Studies, 64(12), 1184–1 19 9. [20] Y. Jefferson, (2004) Facial beauty: Establishing a uni- versal standard, International Journal of Orthodontics, 15(1), 9–22. [21] C. E. Nasjleti and C. J. Kowalski, (1975) Stability of upper face height-total face height ratio with increasing age, Journal of Dental Research, 54(6), 12–41. [22] H. L. Obwegeser and L. J. Marentette, (1986) Profile planning based on alterations in the positions of the bases of the facial thirds, Journal of Oral and Maxillofacial Surgery, 44(4), 302–311. [23] C. Sforza, A. Laino, R. D'Alessio, C. Dellavia, G. Grandi, and V. F. Ferrario, (2007) Three-dimensional facial mor- phometry of attractive children and normal children in the deciduous and early mixed dentition, The Angle Or- thodontist, 77(6), 1025–33. [24] R. Li, S. Yu, and X. Yang, (2007) Efficient spatio-temporal segmentation for extracting moving objects in video se- quences, IEEE Trans. Consumer Electronics, 53(3), 1161– 1167. [25] S. Youn, J. -H. Ahn, and K. Park, (2008) Entrance detec- tion of a moving object using intensity average variation of subtraction images, Proceedings of International Con- ference on Smart Manufacturin g Application, 459–464. [26] Y. P. Guan, (2008) Wavelet multi-scale transform based foreground segmentation and shadow elimination, The Open Signal Processing Journal, 1(6), 1–6. [27] K. Sridharan and V. Govindaraju, (2005) A sampling based approach to facial feature extraction, Proceedings of 4th IEEE Workshop on Automatic Identification Ad- vanced Technologies, 51–56. [28] F. Song, D. Zhang, D. Mei, and Z. Guo, (2007) A multi- ple maximum scatter difference discriminant criterion for facial feature extraction, IEEE Trans. Systems, Man, and Cybernetics, Part B, 37(6), 1599–1606. [29] Y. He, (2009) Real-time nonlinear facial feature extrac- tion using Cholesky decomposition and QR decomposi- tion for face recognition, Proceedings of International Conference on Electronic Computer Technology, 306– 310. [30] P. J. Phillips, H. Moon, S. A. Rizvi, and P. J. Rauss, (2000) The feret evaluation methodology for face-recog- nition algorithms, IEEE Trans. Pattern Analysis and Ma- chine Intelligence, 22(10), 1090–1104. [31] A. M. Martinez, (2002) Recognizing imprecisely local- ized partially occluded and expression variant faces from a single sample per class, IEEE Trans. Pattern Analysis and Machine Intelligence, 24(6), 748–763. [32] H. Wang and S. F. Chang, (1997) A highly efficient sys- tem for automatic face region detection in MPEG videos, IEEE Trans. Circuit System Video Technology, 7(4), 615–628. [33] C. Garcia and G. Tziritas, (1999) Face detection using quantized skin colour regions merging and wavelet packet analysis, IEEE Trans. Multimedia, 1(3), 264–277. [34] Y. Guan, (2007) Robust eye detection from facial image based on multi-cue facial information, Proceedings of IEEE International Conference on Control and Automa- tion, 1775–1778. [35] G. Chetty and M. Wagner, (2004) Automated lip feature extraction for liveness verification in audio-video au- thentication, Proceedings of Image and Vision Comput- ing, 17–22. [36] J. F. Annis and C. C. Gordon, (1988) The development and validation of an automated headboard device for measurement of three-dimensional coordinates of the head and face, Tech. Report, http://oai.dtic.mil/oai/oai.
|