Using Artificial Neural-Networks in Stochastic Differential Equations Based Software Reliability Growth Modeling
600
Goodness-of-fit for DS-1
0
50
100
150
200
250
13579111315 17192123 25272931333537
Time (in weeks)
Actual DataGoel-Okumoto [1]Propose d Model (E quation 13)
Cumulative Faults
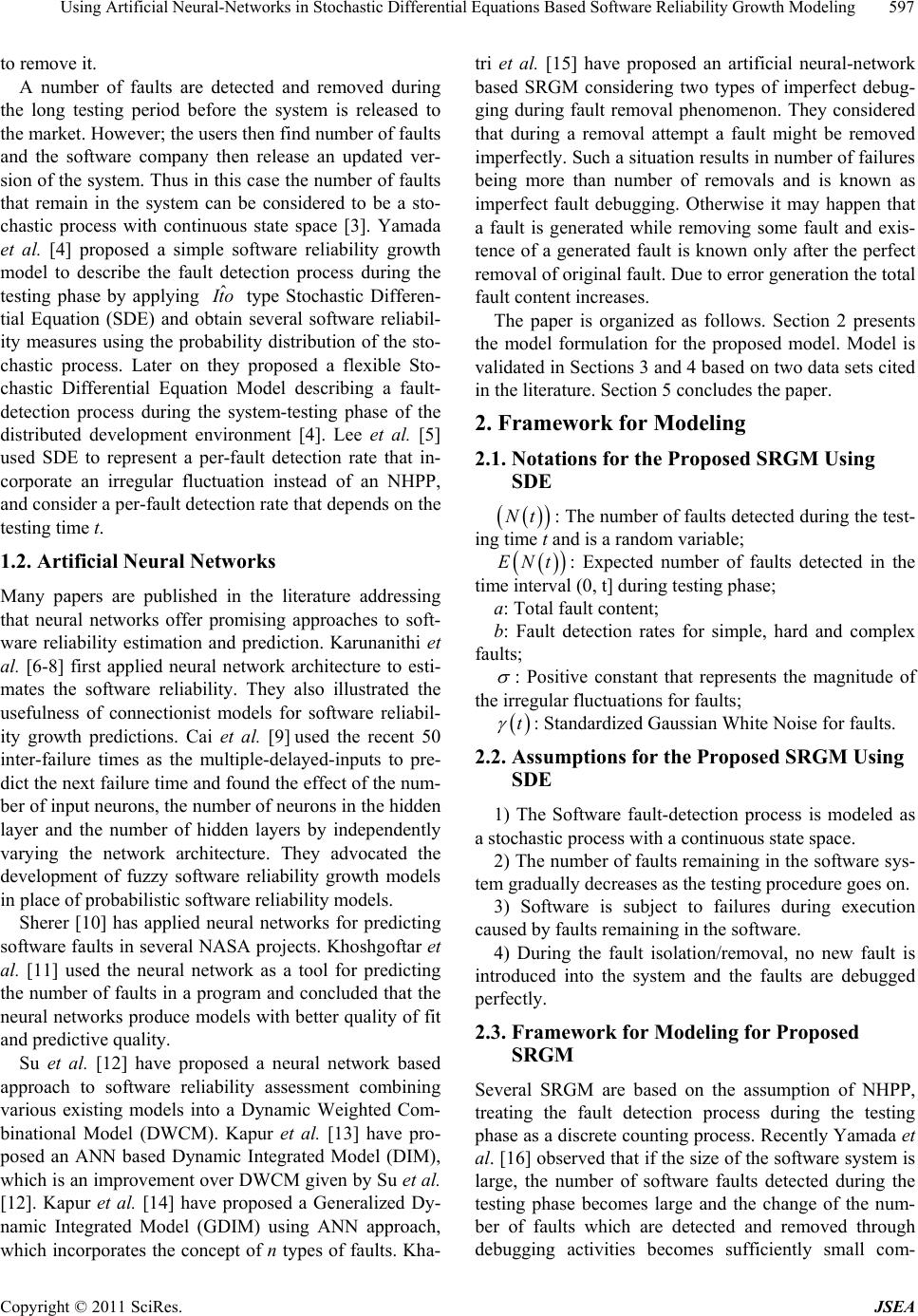
Figure 2. Goodness of fit curve for DS-1.
Goodness-of-fit for DS-2
0
5
10
15
20
25
30
12345678910 111213 1415 16 1718 192021
Time (in weeks)
Actual DataGoel-Okumoto Model [1]Proposed Model ( E quation 13)
Cumulative Faults
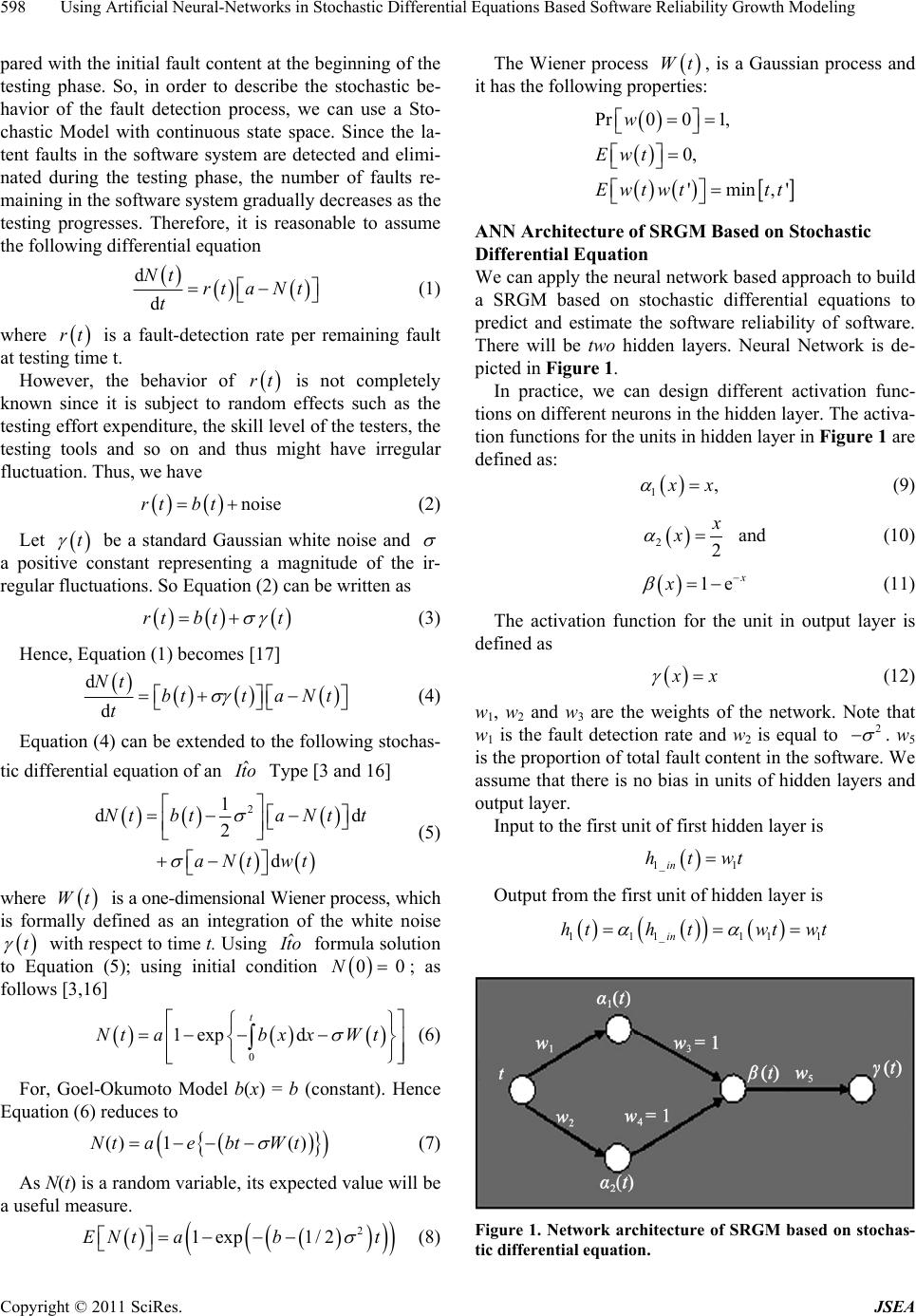
Figure 3. Goodness of fit curve for DS-2.
5. Conclusions
This paper presents an SRGM based on ˆ
to type Sto-
chastic Differential Equations using ANN approach. The
goodness of the fit analysis has been done on two real
software failure datasets. The goodness-of-fit of the pro-
posed Model is compared with Goel Okumoto model [1].
The results obtain ed show better fit and wider applicab il-
ity of the model to different types of failure datasets. From
the numerical illustrations, we see that the Proposed
Model provides improved results because of lower MSE,
Variation, RMSPE and Bias. The usability of SDE is not
only restricted to the model described in this paper but it
can also be extended to improve the results of any other
SRGM. For further research the Proposed Model can be
used along with error generation.
REFERENCES
[1] A. L. Goel and K. Okumoto, “Time Dependent Error De-
tection Rate Model for Software Reliability and Other
Performance Measure,” IEEE Transactions on Reliability,
Vol. 3, 1992, pp. 206-211. doi:10.1109/TR.1979.5220566
[2] P. K. Kapur, R. B. Garg and S. Kumar, “Contributions to
Hardware and Software Reliability,” World Scientific,
Singapore, 1999.
[3] B. Oksendal, “Stochastic Differential Equations—An
Introduction with Applications,” Springer, Berlin, 2003.
[4] S. Yamada and Y. Tamura, “A Flexible Stochastic Dif-
ferential Equation Model in Distributed Development En-
vironment,” European Journal of Operational Research,
Vol. 168, No. 1, 2006, pp. 143-152.
doi:10.1016/j.ejor.2004.04.034
[5] C. H. Lee, Y. T. Kim and D. H. Park, “S-Shaped Software
Reliability Growth Models Derived from Stochastic Dif-
ferential Equations,” IIE Transactions, Vol. 36, No. 12,
2004, pp. 1193-1199. doi:10.1080/07408170490507792
[6] N. Karunanithi and Y. K. Malaiya, “The Scaling Problem
in Neural Networks for Software Reliability Prediction,”
Proceedings of the 3rd International IEEE Symposium of
Software Reliability Engineering, Los Alamitos, 7-10 Oc-
tober 1992, pp. 76-82.
doi:10.1109/ISSRE.1992.285856
[7] N. Karunanithi, Y. K. Malaiya and D. Whitley, “Predic-
tion of Software Reliability Using Neural Networks,”
Proceedings of the 2nd IEEE International Symposium on
Software Reliability Engineering, Los Alamitos, 17-18
May 1991, pp. 124-130.
[8] N. Karunanithi, D. Whitley and Y. K. Malaiya, “Using
Neural Networks in Reliability Prediction,” IEEE Soft-
ware, Vol. 9, No. 4, 1992, pp. 53-59.
doi:10.1109/52.143107
[9] K. Y. Cai, L. Cai, W. D. Wang, Z. Y. Yu and D. Zhang,
“On the Neural Network Approach in Software Reliability
Modeling,” The Journal of Systems and Software, Vol. 58,
No. 1, 2001, pp. 47-62.
doi:10.1016/S0164-1212(01)00027-9
[10] S. A. Sherer, “Software Fault Prediction,” Journal of Sys-
tems and Software, Vol. 29, No. 2, 1995, pp. 97-105.
doi:10.1016/0164-1212(94)00051-N
[11] T. M. Khoshgoftar and R. M. Szabo, “Using Neural Net-
works to Predict Software Faults during Testing,” IEEE
Transactions on Reliability, Vol. 45, No. 3, 1996, pp. 456-
462. doi:10.1109/24.537016
[12] Y. S. Su, C. Y. Huang and Y. S. Chen, “An Artificial
Neural-Network Based Approach to Software Reliability
Assessment,” Proceedings of IEEE Region 10 Conference,
Melbourne, 21-24 November 2005, pp. 1-6.
[13] P. K. Kapur, S. K. Khatri, M. Basirzadeh and N. Dembla,
“Modeling Software Reliability Growth in Distributed
Environment Using Artificial Neural-Networks,” In: S. K.
Khatri and B. Kumar, Eds., Proceedings of International
Conference on Reliability, Infocom Technology and Op-
timization, Faridabad, 1-3 November 2010, pp. 372-382.
[14] P. K. Kapur, S. K. Khatri and D. N. Goswami, “A Gener-
alized Dynamic Integrated Software Reliability Growth
Model Based on Neural-Network Approach,” Proceed-
Copyright © 2011 SciRes. JSEA