 American Journal of Oper ations Research, 2011, 1, 118-133 doi:10.4236/ajor.2011.13014 Published Online September 2011 (http://www.SciRP.org/journal/ajor) Copyright © 2011 SciRes. AJOR Solving the Multi Observer 3D Visual Area Coverage Scheduling Problem by Decomposition Helman I. Stern1, Moshe Zofi1,2, Moshe Kaspi1 1Department of Ind ust ri al E n g i neeri n g an d Ma na gement, Ben Gurion University of the Negev, Beer-Sheva, Israel 2Department of Industrial Management, Sapir College, Sderot, Israel E-mail: {helman, zofi, moshe}@bgu.ac.il Received April 26, 2011; revised May 15, 2011; accepted June 11, 2011 Abstract This paper presents two solution methodologies for the Visual Area Coverage Scheduling problem. The ob- jective is to schedule a number of dynamic observers over a given 3D terrain such that the total visual area covered (viewed) over a planning horizon is maximal. This problem is a more complicated extension of the Set Covering Problem, known to be Np-Hard. We present two decomposition based heuristic methods each containing three stages. The first methodology finds a set of area covering points, and then partitions them into routes (cover first, partition second). The second methodology partitions the area into a region for each observer, and then finds the best covering points and routes (partition first, cover second). In each, a last stage determines dwell (view) times so as to maximize the visible coverage smoothly over the terrain. Com- parative tests were made for the two methods on real terrains for several scenarios. When comparing the best solutions of both methods the CF-PS method was slightly better. However, because of the increased compu- tation time we suggest that the PF-CS method with a fine terrain approximation be used. This method is faster as partitioning the terrain into separate regions for each observer results in smaller coverage and rout- ing problems. A sensitivity analysis of the number of observation points to the total number of terrain points covered depicted the classical notion of decreasing returns to scale, increasing in a convex manner as the number of observation points was increased. The best method achieved 100 percent coverage of the terrain by using only 2.7 percent of its points as observation points. Experts stated that the computer based solutions can save precious time and help plan observation missions with satisfying results. Keywords: Heuristic Search, Genetic Algorithm, Computer Vision, Multi Agents, Meta-Heuristic 1. Introduction The development of Geographical Information Systems (GIS) in recent years has made a large contribution to the ability to solve various terrain related problems effi- ciently. Problems such as; 1) finding the optimal path between two points over a rough terrain, and 2) locating observers in order to visually cover an area can now be solved using mathematical tools. Locating observers over a given area can be modeled as the Set Covering Prob- lem (SCP). The traditional art gallery problem first pro- posed by Chvatal deals with the problem of finding the minimal number of observers required for complete visual coverage of a 2D polygon [1]. This problem is NP-hard, with popular approximations running in [2]. The approach does not model dynamic observers, the quality of coverage, nor does it consider costs. logOn n The Visual Area Coverage Scheduling (VACS) prob- lem offered here combines the two problems of; locating observation points over a 3D terrain, and routing multi- ple observers through them. Creating the best synchro- nization between the observers so as to view the maximal area of the terrain is the main objective. A second objec- tive is to smooth coverage over the terrain. The VACS problem has been formulated and solved using a Genetic Algorithm in [3,4]. This paper introduces two decompo- sition based methodologies; 1) cover first, partition sec- ond (CF-PS) and 2) partition first, cover second (PF-CS), each containing three stages. The analysis is divided into finding observation points, routing observers through  H. I. STERN ET AL. 119 them and determining dwell times at each point. Placing static observers over a given 3D terrain was studied be- fore using two heuristic approaches for graph approxi- mations of the terrain. One is based on a rectangular grid representation [5], and the other on a Triangle Irregular Network (TIN) [6]. As far as we know, no previous work has been made on placing dynamic observers over a 3D terrain. Since many observation problems include a rapid change of locations, the VACS problem has an important practical use in surveillance operations. The paper is organized as follows. Section 2 defines and formulates the VACS problem. Sections 3 and 4 present the two decomposition methodologies with illus- trative examples of each. In section 5 a comparison of the two methodologies is made using real life 3D terrains. Section 5 also provides a discussion of the results, fol- lowed by conclusions. 2. The VACS Problem 2.1. Problem Definition The VACS problem objective is to schedule a fixed number of observers (Q), traversing a 3D terrain, over a fixed planning horizon (T) such that; the total area cov- ered is maximal and viewed uniformly subject to the following conditions: 1) there is a maximum time limit (S) for remaining at a specific observation point, 2) every point on the terrain must be covered at least a certain amount of time (Y% out of T), 3) no area is visible when an observer is on the move, 4) each move must exceed a minimal stated distance (d), 5) movement from one point to another must be within the observer’s limitations (max slope angles, time, etc.), and 6) the observer has 360 de- gree vision. 2.2. Problem Complexity Consider the case in which the observation dwell time S is not limited (i.e. ), the minimal distance be- tween every two consecutive points (d) is extremely large (i.e. ) and the time required for movement between every pair of points in the terrain is very small (i.e. ). S j d 0,ti ,ij In this special case, no observer can have more than a single observation point along its route, and since there are no movement time limitations, each observer can be located at any required point in no time. The optimal solution to the VACS problem in this specific case is to find the Q best observation points in which to place the Q observers along the entire planning horizon. This is one of the forms of the Set Covering Problem (SCP) [7] which is a well known NP-Hard problem [8]. Since the VACS problem can be reduced to SCP, we say that the VACS problem is also NP-Hard. 2.3. Performance Measure Visibility and dead zones can be calculated both for 2D and 3D environments as shown in [9,10]. The total visi- ble area observed in the terrain, by all observers at a given time t, is accumulated along the entire planning period. This accumulated number will be the total visi- bility performance measure. Maximizing the total area observed over the time horizon does not guarantee that every point will be seen by the observers. It is thus, nec- essary to consider the distribution of visible occurrences as well. This leads to a bi-criteria objective; 1) maximiz- ing the number of visible points over the time horizon, and 2) trying to view each point an equal amount of time or at least a fixed percentage of time. It should be noted that both objectives may not be achieved simultaneously. 2.4. Notation Let 1, 2,,PN be the set of all grid points de- scribing the terrain. Time is broken into small, discrete segments 0,1,t,T, where T represents the plan- ning horizon. Let S denote the maximal dwell time, such that no observer is allowed to stay more than S units of time in one place. Let d denote the minimum allowed distance between two consecutive observation points. Let Y denote the percentage of time out of T in which every point must be covered. Let there be Q observers indexed as 1, 2,,qQ. Let represent the location of observer q at time t wher,N. L,qt ,qt P e, 1, 2,, qt Pet be a binary variable set to 1, if observer q is observing at time t, and 0 otherwise. The values of N, T, S, Y, Q and d are given constants while ,qt and ,qt P are integer variables. Let D be a N × N matrix whose common ele- ment ,ij represents the 3D distance from point i to point j. Let MT be a N × N matrix whose common ele- ment ,ij represents the time required to move from point i to point j. Let V be the 3D visibility matrix, whose common element ,ij equals 1 if point j is visible from point i, and 0 otherwise. V and MT can be determined by the algorithms in [10,11]. d t v 2.5. Mathematical Formulation Problem 1: VACS Non-Linear Program , ,, 1, 0 1, , ,, 00 Max t PPi PPi Qj j j tQt vv TN PPiP Pi ti Zvva (1) s.t. Copyright © 2011 SciRes. AJOR  120 H. I. STERN ET AL. 1 ,0; , tS qt t qt (2) ,, ,, , ,1 0, ,1,0, , qt qm P Pqtqmqk tkm ddAA A tmmT 0;, q qt i (3) ,,1 ,1; , qt qt PP t (4) 1, 2,, ,, , 0 0; tt Qt T PPiPPiP Pi t vvv YT (5) where , ,0,1 qt A,1, , qt P , , 1, ,qQ0, ,tT , . 1a The objective function Z in (1) represents the penal- ized total visibility throughout the entire planning hori- zon. The OR logic function returns the value of 1, if at least one of the Q observers sees point i at time t. This term is multiplied by an exponential function which de- creases according to the number of previous times the point was viewed. This smoothes out the visibility over all the points by insuring the more times a point has been viewed up to time t, the less value there is to view it again. Constraint (2) prevents an observer from staying in an observation point more than S continuous segments of time. Constraint (3) insures a distance of at least d when a move occurs. Constraint (4) is added to avoid non feasible solutions in which the observer moves to a point that is not adjacent to its current location in the first step of its path to the next observation point. Constraint (5) ensures that every point will be seen Y percent of the time. A more detailed explanation for this formulation can be found in [3]. This formulation is untenable using mathematical programming techniques as it contains logical and nonlinear expressions in both its objective function and constraints. Hence, two heuristic solution approaches are proffered in the next two sections 3. The Cover First, Partition Second (CF-PS) Heuristic 3.1. Overview This methodology has three phases. The first phase se- lects M specific locations in the terrain to be visited by the observers. The number of observation points is fixed at QK, where each observer will stop at K ob- servation points. Four alternative covering heuristics are developed for this purpose, which are described in the next section. The second phase solves a modified Vehi- cle Routing Problem (VRP) [12] heuristic to iteratively combine points until there are Q routes, one for each observer. The observation time at each point along every route is determined using linear programming in the third Figure 1. Flow chart of CF-PS methodology. phase. Figure 1 provides a flowchart of steps of the CF-PS procedure. 3.2. Phase I—Finding M Preferred Observation Points This problem is a special case of the SCP which is known as NP-hard. There are many covering heuristics for finding the best M locations to place static observers (SCP heuristics). We considered four different covering heuristics referred to as: 1) COVER1, 2) COVER2, 3) COVERGA, and 4) COVERTIN. Each in turn is ex- plained below. 3.2.1. COVER1— Covering Heuristic 1 COVER1 uses a greedy search, starting at the point with the largest cover, while covering continues to the next points, which will increase the total viewable area. Let represent the subset of points visible to i. Let i VPP i V represent the number of points within the subset i. Let V P represent the subset of preferred observation points. The objective of the heuristic is to find M a tosuch that the total visible are A: will maximized. lgorithm int findOrder the po i i PA V be COVER1 A Step 1: For every poi PP i V. ints in a descending order according to i V and start- ing from the top. Step 2: Start with the current point . Add to A an i Pi P d delete it from the list. Go over the list of points and update i V for every point P such that ji VVV . Reorder the list according to V. Copyright © 2011 SciRes. AJOR  H. I. STERN ET AL. 121 po . If Step 3: Find the current int i P0 i V and M repeat step 2. Else, return A. .2.2. COVER2—Covering Heuristic 2 d continues to m int findOrder the po 3 COVER2 starts with the greedy search an the next best point, which is not visible from the previous selected points [5,6]. COVER2 Algorith Step 1: For every poi PP i V. ints in a descending order according to i V and start- ing from the top. Step 2: Start with the current point Add to A. G i P. ry i P o over the list of points and delete eve point visible to i P (including i P itself). If the list is not empty and M, repeat step 2. Else, return A. 3.2.3 COVERGA—Covering Heuristic GA roach [13]. .2.4. COVERTIN—C overing Heuristic Using TIN of COVERGA – uses a genetic algorithm app The GA approach for finding a set of M observation points uses a chromosome encoding of length 2M, com- prised of M sequences of two genes, indicating the lati- tude and longitude coordinates of the selected observa- tion points. Using the 3D visibility matrix V, we calcu- late the total number of points within the terrain which are visible to the M observation points in the chromo- some. This total number is used as the fitness value. Crossovers and mutations are allowed providing the gene values do not exceed the terrain’s borders. Figure 2 shows the chromosome representation. 3 When creating a TIN representation of the terrain out a grid (height map) containing n points, we select a sub- set of these points as vertices and connect them using edges to form a set of contiguous triangles. This repre- sentation replaces the original height map using only the data of the triangles and vertices. The height of the ter- rain represented by a TIN in a given point can be calcu- lated using the plane equation of the triangle that covers it. The difference between the real height given by the grid and the interpolated height found using the TIN is called the error. When creating a triangulation out of a grid we can control the number of vertices and triangles using a specified maximal error (also called the level of Figure 1. Chromosome representation. accuracy)a small COVERTIN heuristic M selected observation po .3. Phase II—Creating Q Routes using the he objective of this phase is to create a route for each of .4. Phase III—Assigning Dwell Times at Each fter creating the routes and the associated movement .4.1. Notation n the terrain be indexed . Thus, a TIN representation with maximal error will contain many vertices and triangles as opposed to a TIN representation with a large maximal error. In the ints are the first M points inserted as vertices when creating a TIN representation of the terrain, based on Garland and Heckbert’s [14] triangulation for rendering a 3D terrain. Using this triangulation, vertices are inserted iteratively according to their error. Most of the first M points found by this heuristics are peaks and saddle points, which are usually good for observation. 3Vehicle Routing Problem (VRP) T the Q observers, which collectively pass through the M observation points determined in Phase I, in minimum total time. This problem is solved using a modified ver- sion of the Vehicle Routing Problem (VRP). Note, that VRP is reducible to the TSP, and thus is also Np-Hard [12]. Many heuristics for solving the VRP are known, the most famous being the Savings Algorithm developed by Clarke & Wright [12] which is employed here. We mod- ify the standard VRP by allowing open end points, no demand quantities, no vehicle capacities, and add a re- quirement that adjacent points on the route exceed a minimum distance, d. Since the time horizon is fixed for each vehicle, minimizing travel time maximizes the al- lowable observation time (dwell time). 3Observation Point A time, it is necessary to determine the dwell (stay) time at each of the occupied observation points. This problem is formulated as a linear programming (LP) problem, and is based on minimizing the maximal hit deviation from the average number of hits. We adopt the term hits to repre- sent the “total number of hits per point”, that is - the total number of discrete time units that a terrain point is visi- ble collectively from all observers. The number of time units available is the residual time after removing travel times. 3 Let the points i1, 2,pN . n point: j = 1Let j represent the index of each observatio, K, (K + 1), 2K, (2K + 1), 3K, (M – K + 1), M. Of the QK points, the first K points belong to the first he next K points to the second observer, and observer; t Copyright © 2011 SciRes. AJOR  122 H. I. STERN ET AL. so on. MT(q) denotes the total time spent on moving be- tween observation points along route q. The residual time on route q is ()()TqT MTq . T(q) is constant as MT(q) is knownfine from Phase II. De as a decision variable representing the amount of thdwell time at observation point j (which because of the indexing con- vention is the e 1th jK jQ observation point along the th route). When s is me jQ olving the VACS problem, timasured in small discrete units (mean- ing that e must be an integer). However, since T is large comred to the smallest time unit, pa is treated as a non negative continuous variable. We roduce the term “hit”, for a point p, when an observer located at point j has visibility indicator ,1 jp v during one unit of time. Let the total hits at point M int p be: , 1 jjp j hxv . Let 1 1 p hh N points, and L .4.2. LP DweI g the be the average num be its lower bound. ll Time Formulation for ber of Ph hits over all 3ase II The LP approach has the objective of minimizin largest deviation instead of the total deviation. This avoids the problem of having an uneven number of hits by smoothing out the size of the deviations. We define a new decision variable E, which indicates the largest de- viation from the average number of hits. This is designed to provide a smooth visible coverage of the entire terrain. Problem 2: Dwell Time LP Min E ; j s.t. Sj 11 ;1 qK j jq K , (6) Tq q ; pp eeEp Q (7) (8) , 1 , 1 ; j p pj 1 1M jjp pp j MN j vee N xv p (9) ,jj p 11 1NM pj vL N (10) 0 j j; e, irem 0 p ep ; ent that 0. E The requ , the dwell time, is bounded from above by S leads tonstraint (6). Constraint (7) insures dwell plus movement time along a single route must not exceed T. Let o c e and e respectively repre- sent the under and over viewing ror of point p with respect to the average number of hits. As error values are complementary in any solution, constraint (8) insures that the minimal E will equal the maximal deviation. Considering these deviations as non negative variables we obtain er ppp hee h . After appropriate substitu- tions this caen as (9). To avoid a solution in which all dwell times are set to zero, thus ensuring the minimal possible deviation, we add constraint (10) such that the average number of hits must exceed a given positive value L. The problem can be considered as a dual objective problem. Where the first priority is to maximize the average number of hits (this is in effect the same as the total number of hits), and the second priority is to minimize the largest deviation E (which smoothes the visible coverage over the terrain). The solution pro- cedure is to perform a right hand side ranging on con- straint (10) by increasing L until an infeasible solution is reached, and using this max value of L solve Problem LP to minimize E so as to smooth the coverage. n be fully writt .5. Illustrative Example Using CF-PS o illustrate the methodology we use a small terrain, 3Methodology T called the Dimona map, containing a 23 × 21 grid of 483 cells (considered as points), with each cell is of size 50 50 mm . The problem is to schedule two observers to the parameters: 1) the planning horizon is 3600 seconds, 2) the observation time must not exceed 1200 seconds, 3) every observer must change its location 3 times, 4) the minimal distance between two consecu- tive observation points is 200 m, and 5) the starting point is {0, 0}. We solve the problem using four different sets of observation points (found by the four heuristics sug- gested in section 3.2). according 3.5.1. Solution ically illustrates the four different solu-Figure 3 graph tions, each containing two routes passing through 6 ob- servation points. The observation points in (a) and (b) are found using COVER1 and COVER2 heuristics re- spectively. The observation points in (c) are found using GA, and those in (d) are found using Garland and Heck- bert’s triangulation. The VRP heuristic was used on each set in order to determine the best two routes (for the two observers) that pass through all 6 points. The routes were found by the modified Clarke and Wright’s savings algo- rithm for each of the four sets. The routes of observers A and B are marked using dashed white and black lines, respectively, with observation points indicated by the tags. Tables 1-4 record the coordinates of the observa- tion points and associated dwell times of each. In addi- tion the overall total travel and observation times of each observer are given. At the bottom of each table are the performance measures in terms of hits. Copyright © 2011 SciRes. AJOR  H. I. STERN ET AL. Copyright © 2011 SciRes. AJOR 123 (a) (b) (c) (d) Figure 3. Final routes for CF-PS covering points determined by: (a) .5.2. Discussi on of Solution l number of points hit in travel time takes a relatively small amount of the time example, for two observers and four different initial COVER1, (b) COVER2, (c) COVERGA, and (d) COVERTIN. Observer A and B’s locations are labeled A1-A3 and B1-B3 and connected with a white and black dashed lines, respectively. 3 Tables 1-4 show that the tota solutions (a), (b), and (d) is smaller than the total number of points hit in solution (c). We can see that even though the total number of hits in solution (c) is relatively large, its maximal deviation is the smallest. This implies that a good initial set of observation points (found in phase I), which together cover a large area of the terrain, is im- portant when trying to reach a uniform hits distribution. Solutions (a) and (d) have a larger total travel time be- tween observation points (opposed to solutions (b) and (c)), leaving less time for observation. Thus, these solu- tions have much lower numbers of hits. Even though horizon (approx 5%) as opposed to dwell times (approx 95%), the exchange of a unit of travel time for observer time has a very large impact on the number of hits (the area observed increases). Therefore it is important to find solutions with low travel time. Note that 100 percent coverage of all 483 points is not attained. Here using 6 observation points from 65 to 94 percent coverage is achieved. In section 5 it is shown that to achieve 100 percent coverage, from 12 to 37 observation points (2.4 to 7.7 percent of the total points in the terrain) are needed, depending on the covering heuristic used. Though the above solutions are very different, they all  H. I. STERN ET AL. 124 solution using COVE r B Table 1. SampleR1 for phase I—Figure 3(a). Observer A Observe Observation point (Y) dwell time (Y) dwell time (X) (X) 1 3 6 1058 2 20 959 2 16 7 1200 3 11 1200 3 18 13 1198 20 16 1200 Total trl time Toe To423 % of points hit: 87.5 ] 2 107 ave144 244 tal observation tim3456 3356 tal number of points hit: Total number of hits: 1,319,504 Range of hits: [0,6766 Average number of hits: 2731.89Maximal deviation: 4034. Table 2. Sample solution using COVER2 for phase I—Figure 3(b). r B Observer A Observe Observation point (Y) (X) dwell time(Y) (X) dwell time 1 12 19 1027 7 8 1200 2 18 16 1200 16 7 1200 3 14 20 1200 12 20 1027 Total trl time Toe To387 % of points hit: 80.1 ] 4 554 ave173 173 tal observation tim3427 3427 tal number of points hit: Total number of hits: 1,899,424 Range of hits: [0,6854 Average number of hits: 3932.55Maximal deviation: 3932. Table 3. Sample solution using COVERGA for phase I—Figure 3(c). r B Observer A Observe Observation point (Y) (X) dwell time(Y) (X) dwell time 1 4 20 1200 2 1 1084 2 12 20 1200 12 8 1200 3 20 18 991 15 1 1200 Total trl time Toe To457 % of points hit: 94 75] 8 521 ave209 116 tal observation tim3391 3484 tal number of points hit: Total number of hits: 1,535,205 Range of hits: [0,68 Average number of hits: 3178.47Maximal deviation: 3696. Copyright © 2011 SciRes. AJOR 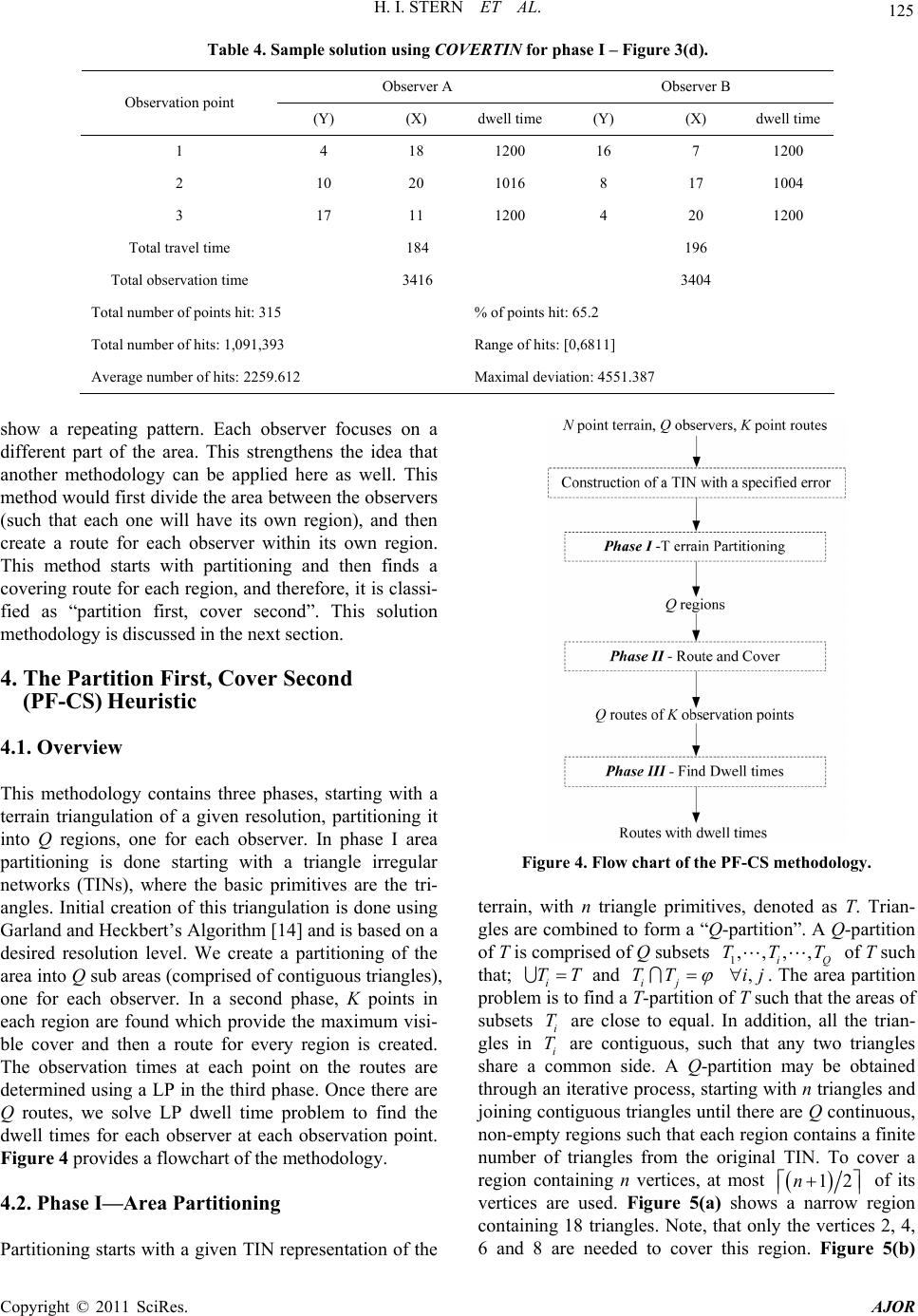 H. I. STERN ET AL. 125 le solution using COV e 3(d). B Table 4. SampERTIN for phase I – Figur Observer A Observer Observation point (Y) dwell time(Y) dwell time (X) (X) 1 4 18 1200 16 7 1200 2 10 20 1016 8 17 1004 3 17 11 1200 4 20 1200 Total trl time Toe To315 % of points hit: 65.2 ] 2 387 ave184 196 tal observation tim3416 3404 tal number of points hit: Total number of hits: 1,091,393 Range of hits: [0,6811 Average number of hits: 2259.61Maximal deviation: 4551. ow a reper focuses on a .1 y contains three phases, starting with a presentation of the sh d eating pattern. Each observ ifferent part of the area. This strengthens the idea that another methodology can be applied here as well. This method would first divide the area between the observers (such that each one will have its own region), and then create a route for each observer within its own region. This method starts with partitioning and then finds a covering route for each region, and therefore, it is classi- fied as “partition first, cover second”. This solution methodology is discussed in the next section. 4. The Partition First, Cover Second (PF-CS) Heuristic . Overview 4 This methodolog terrain triangulation of a given resolution, partitioning it into Q regions, one for each observer. In phase I area partitioning is done starting with a triangle irregular networks (TINs), where the basic primitives are the tri- angles. Initial creation of this triangulation is done using Garland and Heckbert’s Algorithm [14] and is based on a desired resolution level. We create a partitioning of the area into Q sub areas (comprised of contiguous triangles), one for each observer. In a second phase, K points in each region are found which provide the maximum visi- ble cover and then a route for every region is created. The observation times at each point on the routes are determined using a LP in the third phase. Once there are Q routes, we solve LP dwell time problem to find the dwell times for each observer at each observation point. Figure 4 provides a flowchart of the methodology. 4.2. Phase I—Area Partitioning Partitioning starts with a given TIN re Figure 4. Flow chart of the PF-CS methodology. terrain, with n triangle primitives, denoted as . Trian- gles are combined to form a “Q-partition”. A Qartition T ih T -p of th s comprised of Q subsets 1,,,, iQ TTT of T suc at; i TT and ij TT ,ij. The area partition problem is to find a T-partition of T such that the areas of subsets i T are close to equal. In addition, all the trian- gles in T are contiguous, such triangles share a common side. A Q-partition may be obtained through an iterative process, starting with n triangles and joining ctiguous triangles until there are Q continuous, non-empty regions such that each region contains a finite number of triangles from the original TIN. To cover a region containing n vertices, at most i on that any two 12n of its vertices are used. Figure 5(a) shows a narrow region containing 18 triangles. Note, that only the vertices 2, 4, 6 and 8 are needed to cover this region. Figure 5(b) Copyright © 2011 SciRes. AJOR 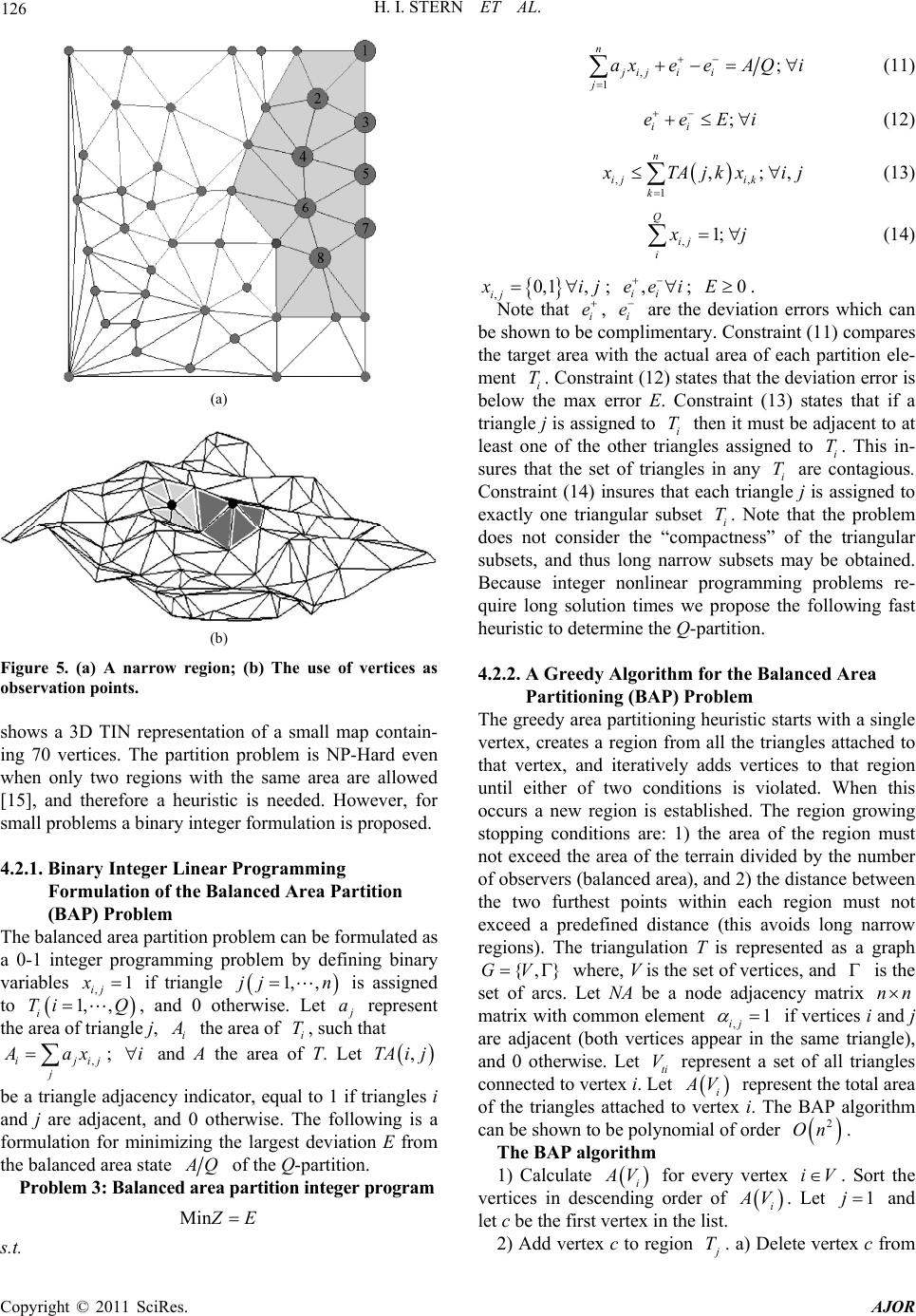 126 H. I. STERN ET AL. (a) (b) Figure 5. (a) A narrow region; (b) The use of vertices as observation points. shows a 3D TIN representation of a small map contain- ons with the same area are allowed 5], and therefore a heuristic is needed. However, for he balanced area partition problem can be formulated as g binary variab ed to 0 ot ing 70 vertices. The partition problem is NP-Hard even when only two regi [1 small problems a binary integer formulation is proposed. 4.2.1. Binary Integer Linear Programming Formulation of the Balanced Area Partition (BAP) Problem T a 0-1 integer programming problem by definin les ,1 ij x if triangle 1, ,jj n is assign 1, ,i Q, and i Therwise. Let a represent the area of triangle j, i the area of i T, such that ,ijij j ax; i and A the area of T. Let ,TAij be ency indicator, equal to 1 triangles i and j are adjacent, an0 otherwise. he following is a triangle adjacif d Ta formulation fmi E from the balanced area state or nimizing the largest deviation Q , 1 ; ji j ii j axeeAQ i n (11) ; ii eeE i (12) , , 1 ,;, n ij ik k TAj kxij (13) ,1; Q ij i j (14) ,0,1 , ij ij; , ii ee i ; 0E. Note that ei , i e are the deviation errors which can be shown to limentary. Constraint the target area whe actual area ment . Co12) states that the deviation error is E. Cstrain13) states that if a tri in angles attached to at vertex, and iteratively adds vertices to that region this occurhe region growing be nstra a ssig comp ith t int ( x error ed (11) compares of each partition ele- i T below the m ai ont ( angle j is an to i T then it must be adjacent to at least one of the other triangles assigned to i T. This in- sures that the set of triangles in any i T are contagious. Constrnt (14) insures that each triangle j is assigned to exactly one triangular subset i T. Note that the problem does not consider the “compactness” of the triangular subsets, and thus long narrow subsets may be obtained. Because integer nonlinear programmg problems re- quire long solution times we propose the following fast heuristic to determine the Q-partition. 4.2.2. A Greedy Algorithm for the Balanced Area Partitioning (BAP) Problem The greedy area partitioning heuristic starts with a single vertex, creates a region from all the tri th until either of two conditions is violated. When s a new region is established. T stopping conditions are: 1) the area of the region must not exceed the area of the terrain divided by the number of observers (balanced area), and 2) the distance between the two furthest points within each region must not exceed a predefined distance (this avoids long narrow regions). The triangulation T is represented as a graph {,}GV where, V is the set of vertices, and is the set of arcs. Let NA be a node adjacency matrix nn matrix with common element ,1 ij if vertices i and j are adjacent (both vertices appear in the same triangle), and 0 otherwise. Let ti V represent a set of all triangles o vertex i. Let i connected t V represent the al area of the triangles attached to vertex i. The BAP algor can be shown to be polynomialr 2 On . The BAP algorithm 1) Calculate tot ithm of orde i Vor every vertex iV. Sort the vertices in descending order i of the Q-partition. Problem 3: Balanced area partition integer program Min E s.t. f of V. Let 1j and let c be the first vertex in the list. 2) Add vertex c to region T. a) Delete vertex c from Copyright © 2011 SciRes. AJOR 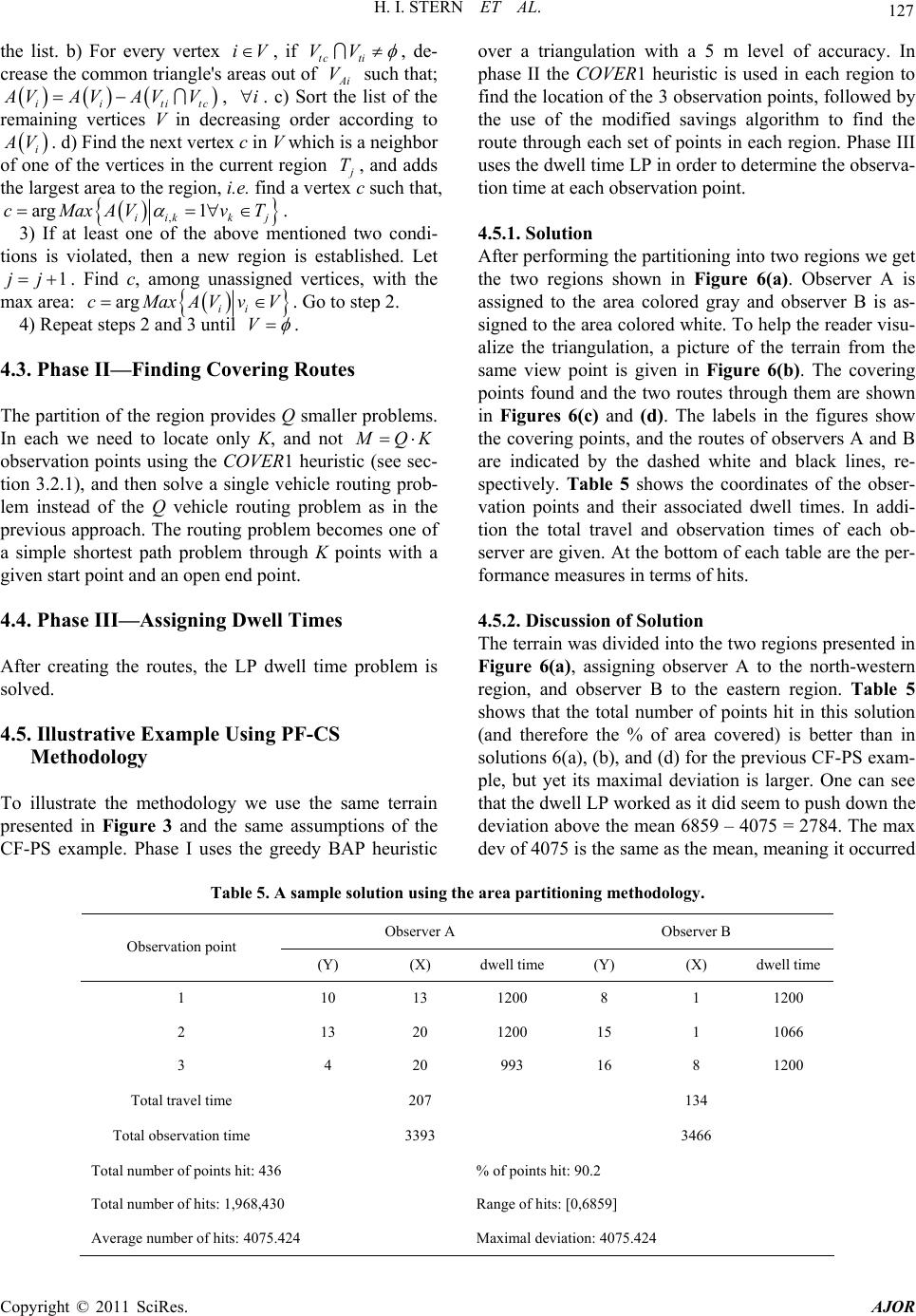 H. I. STERN ET AL. Copyright © 2011 SciRes. AJOR 127 th rtex iV , if tc ti VV V e list. b) For every ve, de- cron triease the commangle's areas out of Ai such that; iititc VAVAVV, i . ng c) o Solist o rder according to rt the f the remaining vertices V in decreasi i V. d) Find the next verte in V which is a neighbor of one of the vertices in the current regi x c on T, and tex adds the largest area to the region, i.e. find a verc such that, ,k j v. 3) If at least one of the above mentioned two condi- s violated, then a new region is established. Let 1jj . Find c, among unassigned vertices, with the max area: arg tions i 1 iik cMaxAV T argcMaxAVvV. Go to step 2. ii V 4) Repeat steps 2 and 3 until n of the region proviQ , a . In 4.3. Phase II—Finding Covering Routes The partitio smaller probledes Kms. each we need to locate onlynd not QK sec-obser m resent vation points using the instead of the Q vehicleg Methodology ate the methodology we ed in Figure 3 and the COVER routin e sam Table 5. 1 ob- p the a terrain of the uristic fter performing the partitioning into two regions we get shown in Figure 6(a). Observer A is he terrain was divided into the two regions presented in er A to the north-western A samthe Observer B heuristic (see ing pr roblem as in ints with use the same assumptions P he ple solution using tion 3.2.1), and then solve a single vehicle rout le previous approach. The routing problem becomes one of a simple shortest path problem through K po given start point and an open end point. 4.4. Phase III—Assigning Dwell Times After creating the routes, the LP dwell time problem is solved. over a triangulation with a 5 m level of accuracy. In phase II the COVER1 heuristic is used in each region to find the location of the 3 observation points, followed by the use of the modified savings algorithm to find the route through each set of points in each region. Phase III uses the dwell time LP in order to determine the observa- tion time at each observation point. 4.5.1. Solution Observer A A the two regions assigned to the area colored gray and observer B is as- signed to the area colored white. To help the reader visu- alize the triangulation, a picture of the terrain from the same view point is given in Figure 6(b). The covering points found and the two routes through them are shown in Figures 6(c) and (d). The labels in the figures show the covering points, and the routes of observers A and B are indicated by the dashed white and black lines, re- spectively. Table 5 shows the coordinates of the obser- vation points and their associated dwell times. In addi- tion the total travel and observation times of each ob- server are given. At the bottom of each table are the per- formance measures in terms of hits. 4.5.2. Discussi on of Solution T Figure 6(a), assigning observ region, and observer B to the eastern region. Table 5 shows that the total number of points hit in this solution (and therefore the % of area covered) is better than in solutions 6(a), (b), and (d) for the previous CF-PS exam- ple, but yet its maximal deviation is larger. One can see that the dwell LP worked as it did seem to push down the deviation above the mean 6859 – 4075 = 2784. The max dev of 4075 is the same as the mean, meaning it occurred area partitioning methodology. 4.5. Illustrative Example Using PF-CS To illustr p CF-PS example. Phase I uses the greedy BA Observation point (Y) (X) dwell time (Y) (X) dwell time 1 10 13 1200 8 1200 1 2 Total trl time134 Total obsetion ti3393 3466 Total 36 % of points hit: 90.2 To430 Range of hits: [0,6859] 4 75.424 13 20 1200 15 1 1066 3 4 20 993 16 8 1200 ave me it: 4 , 207 rva number of points h tal number of hits: 1,968 Average number of hits: 4075.42Maximal deviation: 40  128 H. I. STERN ET AL. (a) (b) (c) (d) Figure 6. Partitioning of the map into two regions, anesultant routes for PF-CS example. (a) TIN represetation of the terrain and its partition into two regions; (b) anotheof the partition; (c) final routes and observation pints; (d) 3D visualization of the solution. high (each point was seen 075 times or seconds on average) which is good, as it everal tests were conducted to compare the quality of r the VACS problem using both F-PS and PF-CS decomposition heuristics. The tests were tested; 1) Dimona map, grid = 23 × 21, terrain area = 1 × 1 km, 2) Modiin map, grid = 61 × 61, terrain area = d the rn r view o between 0 hits (points not seen) and the mean 4075. This is because the mean was very of maps, differing by size and topographic structures, 4 implies the total number of hits was also very high. 5. Performance Comparison of CF-PS and PF-CS Decomposition Methods 5.1. Test Parameters S the solutions achieved fo C examined the solutions found by the methodologies for three maps and two scenarios, using 4 and 3 different versions of the CF-PS and PF-CS methods, respectively. This resulted in a total of 42 test cases. The performance of both methodologies was evaluated by function (1), which represented the total visibility of the terrain by all observers, penalized for multiple coverage. Three types 3 × 3 km, 3) Valley of Elah map, grid = 81 × 82, terrain area = 4 × 4 km. Figure 7 shows the terrains, where con- tour lines are 10 meters apart. The various grid sizes rep- resent up to a 400 Percent scale up of the problem size. For the CF-PS method the original rectangular grid point height representation of the terrain is used. Four covering versions are tested (COVER1, COVER2, COVERGA and COVERTIN) for this method. For the PF-CS method the grid height maps are converted to TIN representations. Three different TIN versions are tested, each represent- ing different approximations of the terrain. These are denoted as TIN5, TIN10 and TIN20 for approximations of 5 m, 10 m, and 20 m levels of accuracy. Observation missions can have different objectives according to different scenarios. This can have a large effect on the desirable number of relocations and the allowable observation dwell times. We chose to examine the two following scenarios: Copyright © 2011 SciRes. AJOR 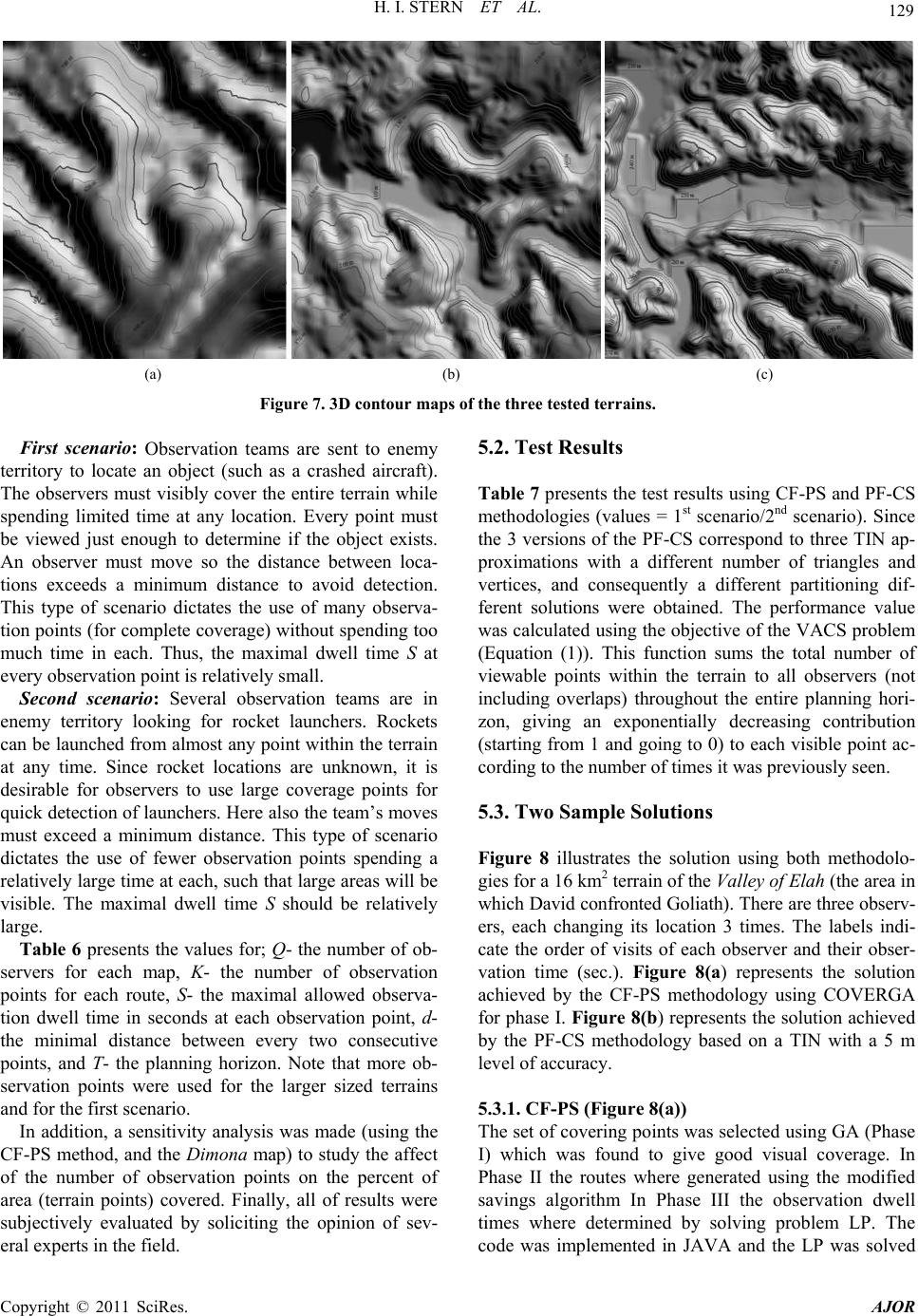 H. I. STERN ET AL. 129 (a) (b) (c) Figure 7. 3D contour maps of the three tested terrains. First scenario: territory to locate an object (such he observers must visibly cover t p tly a different partitioning dif- re obtained. The performance value - observer and their obser- ) represents the solution ined by solving problem LP. The VA and the LP was solved Observation teams are sent to enemy 5.2. Test Results as a crashed aircraft). he entire terrain while Table 7 presents the test results using CF-PS and PF-CST s ending limited time at any location. Every point must be viewed just enough to determine if the object exists. An observer must move so the distance between loca- tions exceeds a minimum distance to avoid detection. This type of scenario dictates the use of many observa- tion points (for complete coverage) without spending too much time in each. Thus, the maximal dwell time S at every observation point is relatively small. Second scenario: Several observation teams are in enemy territory looking for rocket launchers. Rockets can be launched from almost any point within the terrain at any time. Since rocket locations are unknown, it is desirable for observers to use large coverage points for quick detection of launchers. Here also the team’s moves must exceed a minimum distance. This type of scenario dictates the use of fewer observation points spending a relatively large time at each, such that large areas will be visible. The maximal dwell time S should be relatively large. Table 6 presents the values for; Q- the number of ob- servers for each map, K- the number of observation points for each route, S- the maximal allowed observa- tion dwell time in seconds at each observation point, d- the minimal distance between every two consecutive points, and T- the planning horizon. Note that more ob- servation points were used for the larger sized terrains and for the first scenario. In addition, a sensitivity analysis was made (using the CF-PS method, and the Dimona map) to study the affect of the number of observation points on the percent of area (terrain points) covered. Finally, all of results were subjectively evaluated by soliciting the opinion of sev- eral experts in the field. methodologies (values = 1st scenario/2nd scenario). Since the 3 versions of the PF-CS correspond to three TIN ap- proximations with a different number of triangles and uenvertices, and conseq rent solutions wefe was calculated using the objective of the VACS problem (Equation (1)). This function sums the total number of viewable points within the terrain to all observers (not including overlaps) throughout the entire planning hori- zon, giving an exponentially decreasing contribution (starting from 1 and going to 0) to each visible point ac- cording to the number of times it was previously seen. 5.3. Two Sample Solutions Figure 8 illustrates the solution using both methodolo- gies for a 16 km2 terrain of the Valley of Elah (the area in which David confronted Goliath). There are three observ- rs, each changing its location 3 times. The labels indie cate the order of visits of each ation time (sec.). Figure 8(a v achieved by the CF-PS methodology using COVERGA for phase I. Figure 8(b) represents the solution achieved by the PF-CS methodology based on a TIN with a 5 m level of accuracy. 5.3.1. CF-PS (Figure 8(a)) The set of covering points was selected using GA (Phase I) which was found to give good visual coverage. In Phase II the routes where generated using the modified savings algorithm In Phase III the observation dwell mes where determti code was implemented in JA Copyright © 2011 SciRes. AJOR  H. I. STERN ET AL. 130 Table 6. Test parameters for all maps and scenarios (table values are 1st scenario/2nd scenario). Map Q K S d T Dimona 2/2 5/3 600/1200 200/200 3600/3600 M60000 4000 72000 Va h odiin 3/2 5/4 /180/4 0/72 lley of Ela3/3 8/3 600/2400 500/500 7200/7200 F-PS and PF-CS (col 4 and 5 values are for 1st nd scenario) Performance Value* 104 No. observers, No. points Version Method Map Table 7. Results for C scenario/2. 21.6/51 2.10/2.6 COVER1 19.1/50.6 2.10/2.6 COVER2 24.5/61.6 2.10/2.6 COVERGA C PF-CS Dimona 1 COVER1 2 COVER2 COVERGA C CF-PS PF-CS Modiin COVER1 COVER2 COVERGA C CF-PS PF-CS Valley of Elah 14.3/29.4 2.10/2.6 OVERTIN CF-PS 23.4/60.5 2.10/2.6 TIN 20 23.5/62.8 2.10/2.6 TIN 10 23.8/62.9 2.10/2.6 TIN 5 97.7/484.23.15/2.8 36.9/527.33.15/2.8 292.7/716.5 3.15/2.8 186.6/358.2 3.15/2.8 OVERTIN 275/645.5 3.15/2.8 TIN 20 290/673.4 3.15/2.8 TIN 10 285.6/642.9 3.15/2.8 TIN 5 409.6/1426 3.24/3.9 423.5/1451 3.24/3.9 569.6/2024 3.24/3.9 507.3/1810 3.24/3.9 OVERTIN 555.9/1896 3.24/3.9 TIN 20 566.3/1946 3.24/3.9 TIN 10 566.2/1946 3.24/3.9 TIN 5 using Matlab. This solution pr a clear area tioning between the observers. Observer C moves along e western ridge (advancing from south to north), which 5.3.2. PF-(Figure 8(b)) In Pha area was partthe three regions for a terrain triangulation of 5 m accuracy. In Phase II h observer focuses on a re- s sent to the north-western oduces parti- th visually covers the entire valley and most of the gorges which flow from east to west. Observer B covers the southern part of the terrain moving from west to east. Observer A covers the northern side of the terrain with its deep gorges, which are not visible from the western/ southern ridge. the observation points in each region were selected using a greedy SCP heuristic, and the routes which pass through them were generated using the shortest path algorithm. Phase III also used the LP problem. In this solution we CS se I theitioned to can see once again that eac stricted region. Observer A i Copyright © 2011 SciRes. AJOR 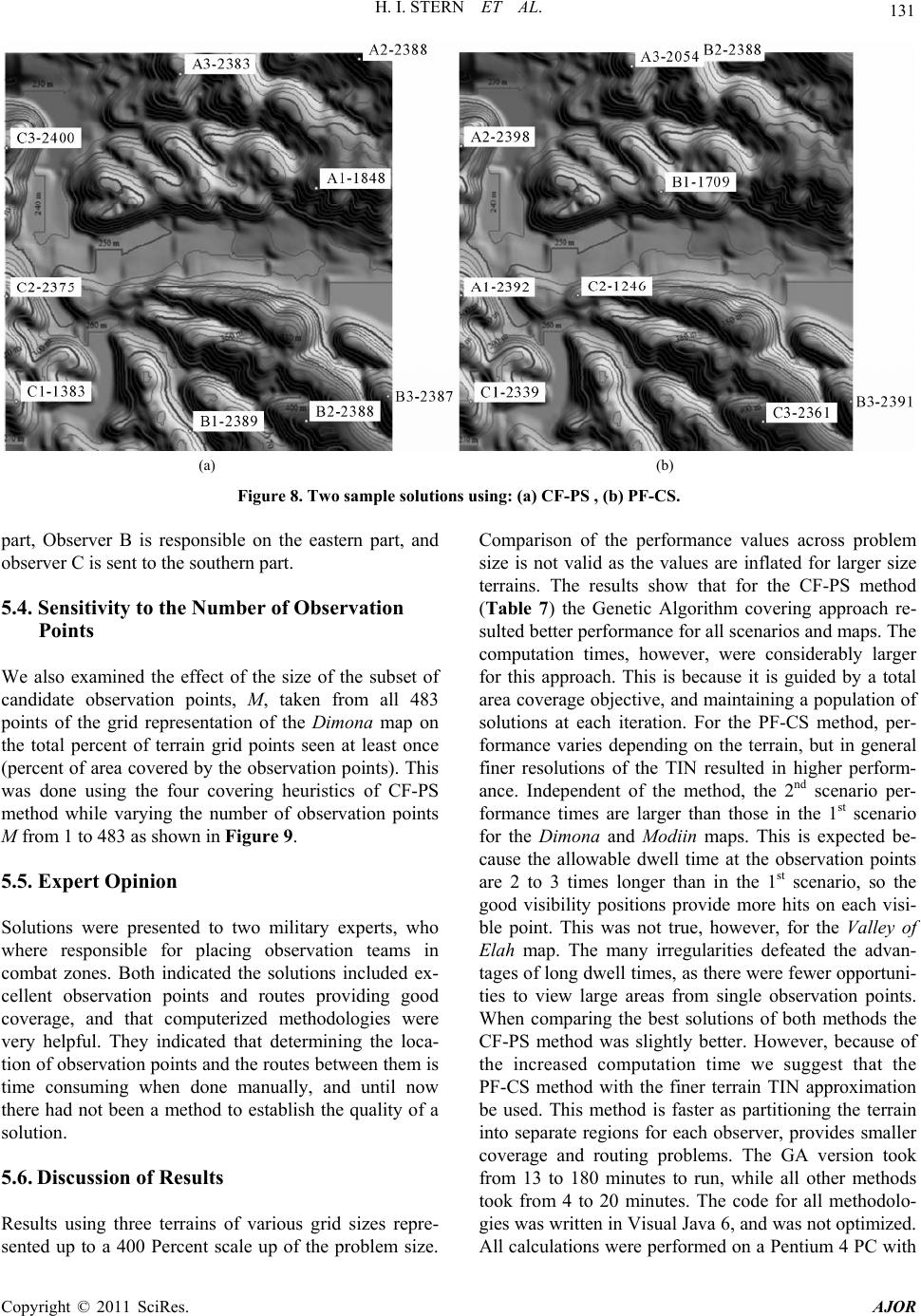 H. I. STERN ET AL. 131 (a) (b) Figure 8. Two sample solutions using: (a) CF-PS , (b) PF-CS. part, Observer B is responsible on the eastern part, and observer C is sent to the s .4. Sensitivity to the Num of the subset of 83 on e tof terrain grid points seen at least once n teams in cated the solutions included ex- nts and routes providing good o a 400 Percent scale up of the problem size. Comparison of the performance values across problem es are inflated for larger size that for the CF-PS method rithm covering approach re- ulted better performance for all scenarios and maps. The were considerably larger guided by a total outhern part. size is not valid as the valu 5ber of Observation terrains. The results show (Table 7) the Genetic Algo Points e also examined the effect of the size W candidate observation points, M, taken from all 4 points of the grid representation of the Dimona map otal percent th (percent of area covered by the observation points). This was done using the four covering heuristics of CF-PS method while varying the number of observation points M from 1 to 483 as shown in Figure 9. 5.5. Expert Opinion Solutions were presented to two military experts, who here responsible for placing observatiow combat zones. Both indi ellent observation poic coverage, and that computerized methodologies were very helpful. They indicated that determining the loca- tion of observation points and the routes between them is time consuming when done manually, and until now there had not been a method to establish the quality of a solution. 5.6. Discussion of Results Results using three terrains of various grid sizes repre- sented up t s computation times, however, r this approach. This is because it is fo area coverage objective, and maintaining a population of solutions at each iteration. For the PF-CS method, per- formance varies depending on the terrain, but in general finer resolutions of the TIN resulted in higher perform- ance. Independent of the method, the 2nd scenario per- formance times are larger than those in the 1st scenario for the Dimona and Modiin maps. This is expected be- cause the allowable dwell time at the observation points are 2 to 3 times longer than in the 1st scenario, so the good visibility positions provide more hits on each visi- ble point. This was not true, however, for the Valley of Elah map. The many irregularities defeated the advan- tages of long dwell times, as there were fewer opportuni- ties to view large areas from single observation points. When comparing the best solutions of both methods the CF-PS method was slightly better. However, because of the increased computation time we suggest that the PF-CS method with the finer terrain TIN approximation be used. This method is faster as partitioning the terrain into separate regions for each observer, provides smaller coverage and routing problems. The GA version took from 13 to 180 minutes to run, while all other methods took from 4 to 20 minutes. The code for all methodolo- gies was written in Visual Java 6, and was not optimized. All calculations were performed on a Pentium 4 PC with Copyright © 2011 SciRes. AJOR 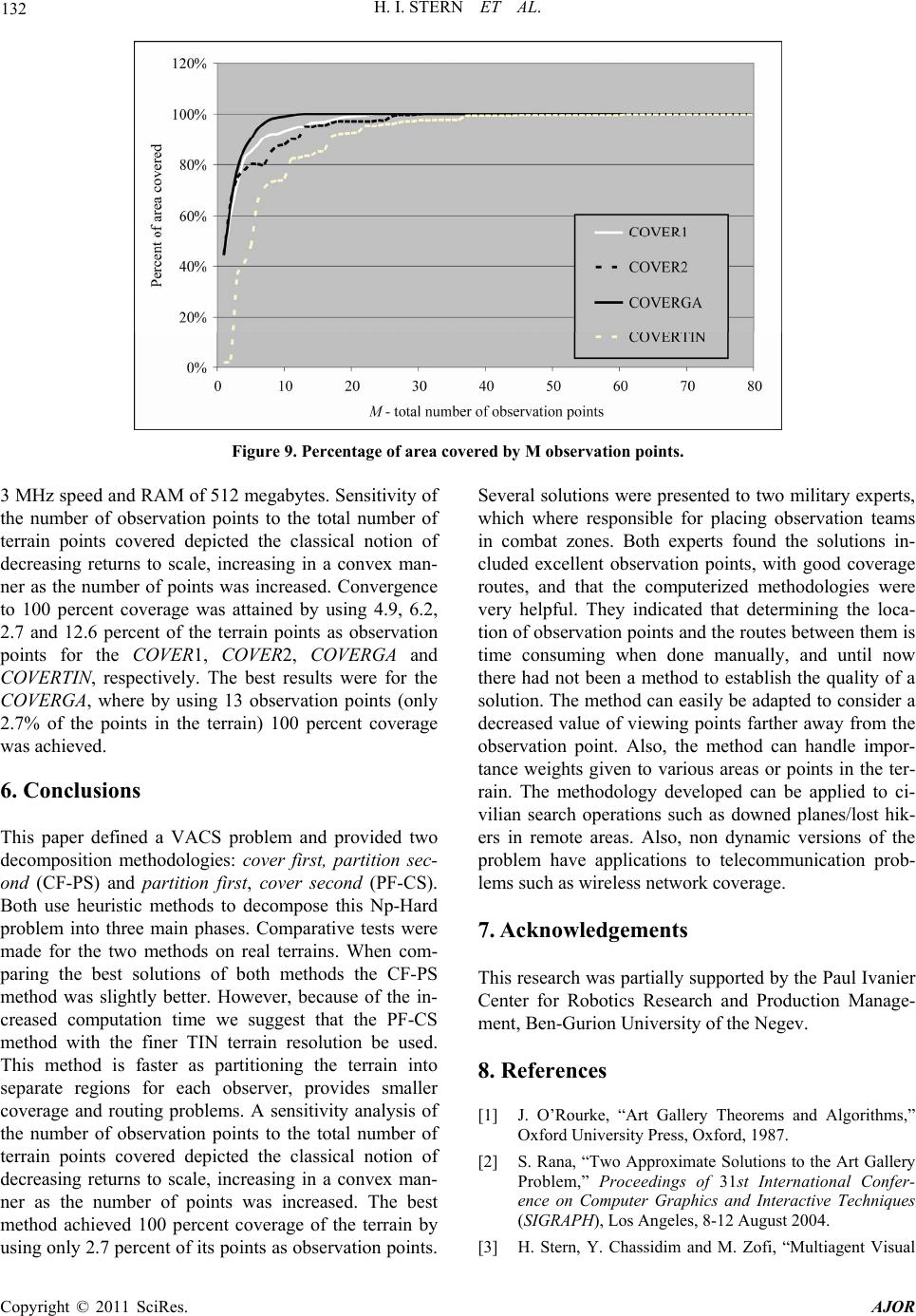 132 H. I. STERN ET AL. Figure 9. Percentage of area covered by M observation points. 3 MHz speed and RAM of 512 megabytes. Sensitivity of the number of observation points to the total number of terrain points covered depicted the classical notion of decreasing returns to scale, increasing in a convex man- ner as the number of points w 100 percent coverage was attained by using 4.9, 6.2, d partition first, cover second (PF-CS). ethods to decompose this Np-Hard ain phases. Comparative tests were ade for the two methods on real terrains. When com- Several solutions were presented to two military experts, which where responsible for placing observation teams in combat zones. Both experts found the solutions in- cluded excellent observation points, with good coverage terized methodologies were very helpful. They indicated that determining the loca- the Art Gallery Problem,” Proceedings of 31st International Confer- ics and Interactive Techniques August 2004. as increased. Convergence routes, and that the compu to 2.7 and 12.6 percent of the terrain points as observation points for the COVER1, COVER2, COVERGA and COVERTIN, respectively. The best results were for the COVERGA, where by using 13 observation points (only 2.7% of the points in the terrain) 100 percent coverage was achieved. 6. Conclusions This paper defined a VACS problem and provided two decomposition methodologies: cover first, partition sec- ond (CF-PS) an Both use heuristic m problem into three m m paring the best solutions of both methods the CF-PS method was slightly better. However, because of the in- creased computation time we suggest that the PF-CS method with the finer TIN terrain resolution be used. This method is faster as partitioning the terrain into separate regions for each observer, provides smaller coverage and routing problems. A sensitivity analysis of the number of observation points to the total number of terrain points covered depicted the classical notion of decreasing returns to scale, increasing in a convex man- ner as the number of points was increased. The best method achieved 100 percent coverage of the terrain by using only 2.7 percent of its points as observation points. tion of observation points and the routes between them is time consuming when done manually, and until now there had not been a method to establish the quality of a solution. The method can easily be adapted to consider a decreased value of viewing points farther away from the observation point. Also, the method can handle impor- tance weights given to various areas or points in the ter- rain. The methodology developed can be applied to ci- vilian search operations such as downed planes/lost hik- ers in remote areas. Also, non dynamic versions of the problem have applications to telecommunication prob- lems such as wireless network coverage. 7. Acknowledgements This research was partially supported by the Paul Ivanier Center for Robotics Research and Production Manage- ment, Ben-Gurion University of the Negev. 8. References [1] J. O’Rourke, “Art Gallery Theorems and Algorithms,” Oxford University Press, Oxford, 1987. [2] S. Rana, “Two Approximate Solutions to ence on Computer Graph (SIGRAPH), Los Angeles, 8-12 [3] H. Stern, Y. Chassidim and M. Zofi, “Multiagent Visual Copyright © 2011 SciRes. AJOR  H. I. STERN ET AL. 133 jor.2005.02.078 Area Coverage Using a New Genetic Algorithm Selection Scheme,” European Journal of Operational Research Vol. 175, No. 3, 2006, pp. 1890-1907. , doi:10.1016/j.e hassidim, M. Zofi and M. Kaspi, “Multi elligence and on, Sarasota . 2, 1981, pp. 186-197. [4] H. Stern, Y. C Agent Visual Area Coverage Strategies Using an Adap- tive Queen Genetic Algorithm,” Proceedings of IASTED International Conference on Artificial Int Applications, Innsbruck, 14-16 February 2005. [5] W. R. Franklyn, “Applications of Analytical Cartogra- phy,” Handbook of Discrete and Combinatorial Mathe- matics, CRC Press, Boca Raton, 2000. [6] M. Marengoni, B. A. Draper, A. Hanson and R. Sitara- man, “Placing Observers to Cover a Polyhedral Terrain in Polynomial Time,” Proceedings of the 3rd IEEE Work- shop on Applications of Computer Visi December 1996, pp. 1-6. , 2-4 [7] V. V. Vazirani, “Approximation Algorithms,” Springer- Verlag, Berlin, 2001. [8] M. R. Garey and D. S. Johnson, “Computers and Intrac- tability: A Guide to the Theory of NP-Completeness,” W. H. Freeman and Co, San Francisco, 1979. [9] H. E. Gindy and D. Avis, “A Linear Algorithm for Com- puting the Visibility Polygon from a Point,” Journal of Algorithms, Vol. 2, No doi:10.1016/0196-6774(81)90019-5 [10] D. Cohen-Or and A. Shaked, “Visibility and Dead-Zones in Digital Terrain Maps,” Computer Graphic s Forum, Vol. 14, No. 3, 1995, pp. 171-180. doi:10.1111/j.1467-8659.1995.cgf143_0171.x [11] F. M. Jonsson, “An Optimal Pathfinder for V Real-World Digital Terrain Maps,” T ehicles in he Royal Institute of hn Wiley eckbert, “Fast Triangular Ap- . 113-117. Science, School of Engineering Physics, Stockholm, 1997. [12] E. L. Lawler, J. K. Lenstra, A. H. G. R. Kan and D. B. Shmoys, “The Traveling Salesman Problem,” Jo & Sons, Hoboken, 1992. [13] A. Jaszkiewicz, “Comparative Study of Multiple-Objective Metaheuristics on the Bi-Objective Set Covering Problem and the Pareto Memetic Algorithm,” Research Report, Institute of Computing Science, Poznan University of Technology, Poznań, 2001. [14] M. Garland and P. S. H proximation of Terrains and Height Fields,” Proceedings of SIGGRAPH’97 Conference, Los Angeles, 3-8 August 1997. [15] B. Hayes, “The Easiest Hard Problem,” American Scien- tist, Vol. 90, No. 2, 2002, pp doi:10.1511/2002.2.113 Copyright © 2011 SciRes. AJOR
|