Energy and Power En gi neering, 2011, 3, 513-516
doi:10.4236/epe.2011.34062 Published Online September 2011 (http://www.SciRP.org/journal/epe)
Copyright © 2011 SciRes. EPE
Fault Detection and Isolation Based on Neural Networks
Case Study: Steam Turbine
Djamel Benazzouz, Samir Benammar, Smail Adjerid
Solid Mechanic and Systems Laboratory (LMSS), M’Hamed Bougara University, Boumerdès, Algeria
E-mail: dbenazzouz@yahoo.fr
Received February 9, 2011; revised March 20, 2011; accepted April 8, 2011
Abstract
The real-time fault diagnosis system is very important for steam turbine generator set due serious fault re-
sults in a reduced amount of electricity supply in power plant. A novel real-time fault diagnosis system is
proposed by using Levenberg-Marquardt algorithm related to tuning parameters of Artificial Neural Network
(ANN). The model of novel fault diagnosis system by using ANN are built and analyzed. Cases of the diag-
nosis are simulated. The results show that the real-time fault diagnosis system is of high accuracy and quick
convergence. It is also found that this model is feasible in real-time fault diagnosis. The steam turbine is used
as a power generator by SONELGAZ, an Algerian company located at Cap Djinet town in Boumerdes dis-
trict. We used this turbine as our main target for the purpose of this analysis. After deep investigation, while
keeping our focus on the most sensitive parts within the turbine, the weakest and the strongest points of the
system were identified. Those are the points mostly adequate for failure simulations and at which the de-
signed system will be better positioned for irregularities detection during the production process.
Keywords: Failure, Diagnosis, Artificial Neural Networks, Isolation, Steam Turbine
1. Introduction
The first role of the industrial diagnosis is to increase the
availability of the industrial installations to reduce the
direct and indirect maintenance costs of the production
equipments. The direct costs of this maintenance are
mainly those related to the various spare parts. On the
other hand, the indirect costs are essentially due to the
off line production [1,2]. The increase repair time influ-
ences negatively on the indirect maintenance costs.
The objective of this paper is to minimize this waiting
time for detecting the failure in the industrial installa-
tions. The proposed model will supervise the system,
detect and localize any faulty in real time. An important
characteristic of the proposed model is that it has the
possibility of detecting and locating several failing points
at the same time. For example: an increase in the vibra-
tion level in the four landings of the turbine. The data
vectors for the training in the Artificial Neural Network
(ANN) model are intervals limited by two values, mini-
mum and maximum. The used symbol “1” represents a
normal functioning and the symbol “–1” represents a
failure situation. The training algorithm used for the
network is the Levenberg-Marquardt algorithm, the choice
of this algorithm is that it gives a fast training of the
ANN compared to the other algorithms of decent of gra-
dient [3,4]. The programming was completely developed
under MATLAB 7.5.
2. Steam Turbine Presentation
The study case concerns a steam turbine of an Algerian
electrical production thermal plant SONELGAZ located
at Cap-Djinet, Boumerdes. The turbine transforms the
thermal energy contained in the vapor coming from the
boiler into a rotation movement of the tree. Mechanical
work obtained is used to actuate the alternator. It is
composed of three bodies, HP body (High Pressure), MP
body (Average Pressure) and BP body (Low Pressure). It
has a power and a nominal number of revolutions of 176
MW and 3000 rpm respectively. The line of tree rests on
four landings, each one of these landings thus carries two
relative vibration sensors, it is the total of eight sensors
on all the line of tree, but for model simplification we
consider only four sensors. The maximum value of rela-
tive vibrations that can be supported by the system is 120
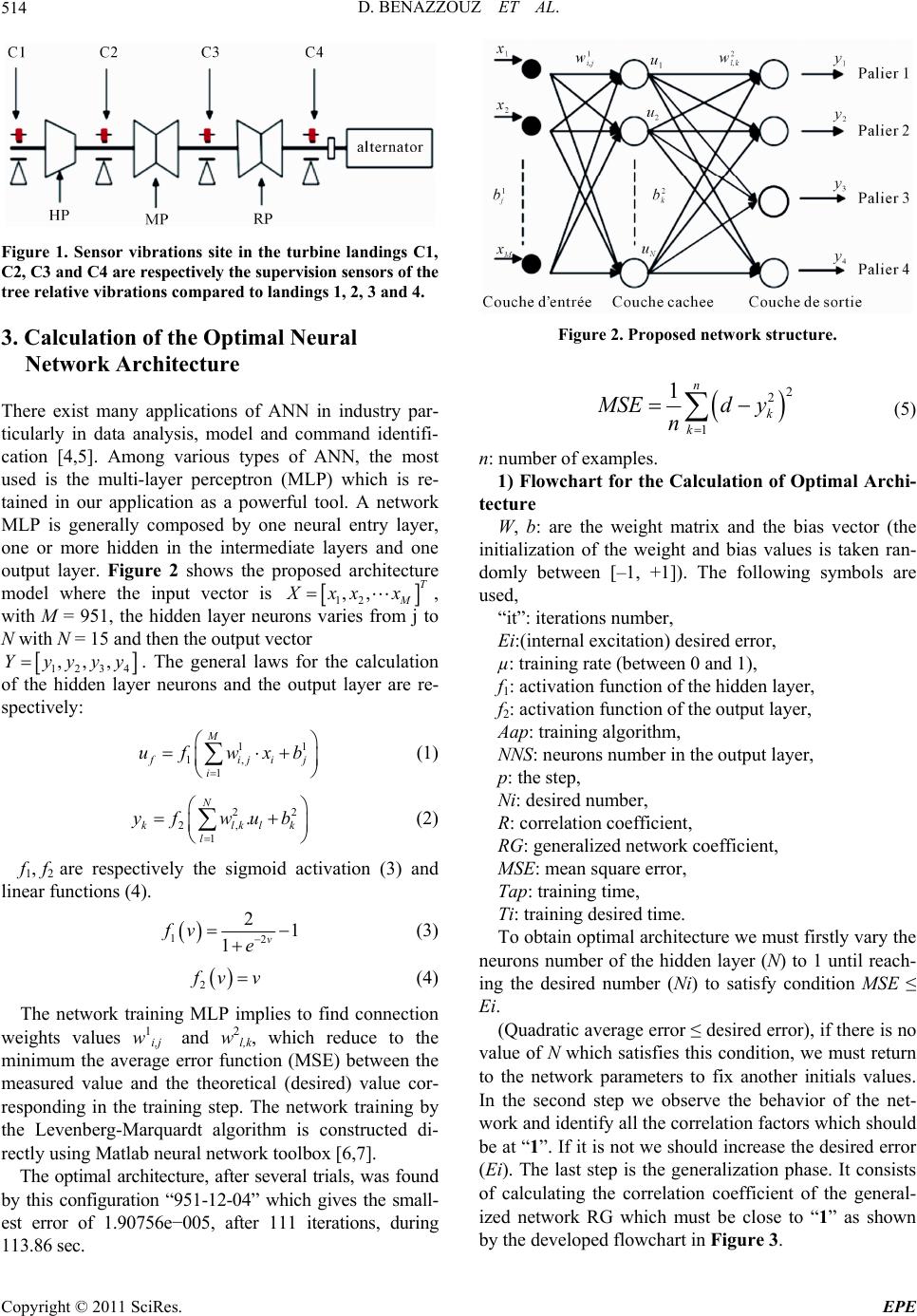
μm. Figure 1 represents the supervision and placement
sensors site in the landings turbine.