H. GULDEMIR405
00.002 0.004 0.006 0.008 0.01
0
t (s)
Vo (Volt)
2
4
6
8
10
12
4
8
12
16
20
24
E
E (V o lt)
V
o
(Volt)
00.002 0.004 0.006 0.0080.01
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
t (s)
I
(A)
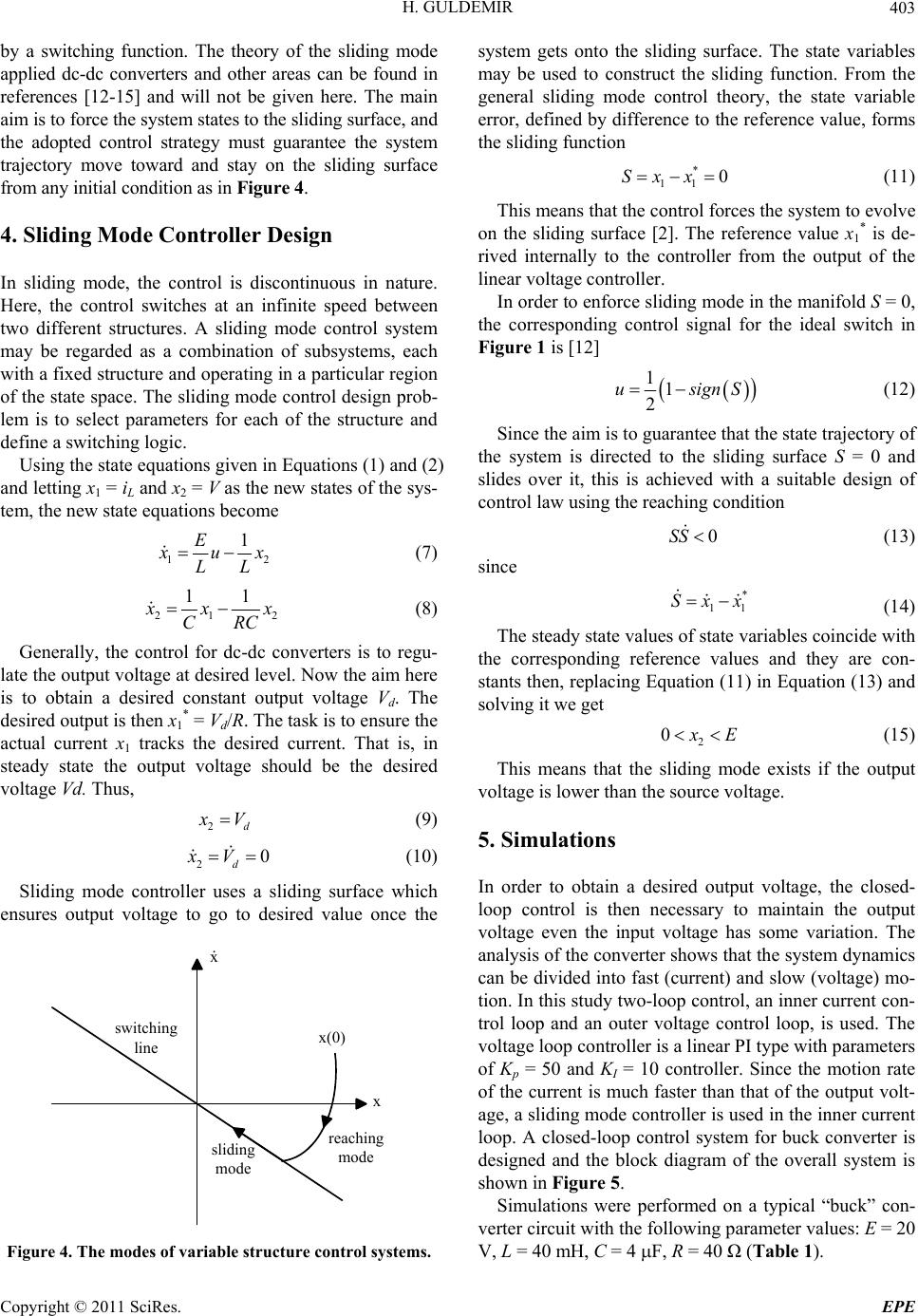
Figure 8. Output voltage and input current waveforms for
step changes in input voltage.
02 46 810 1214 16
0
0.05
0. 1
0.15
0. 2
0.25
0. 3
0.35
Vo ( V )
I ( A )
V
o
(V)
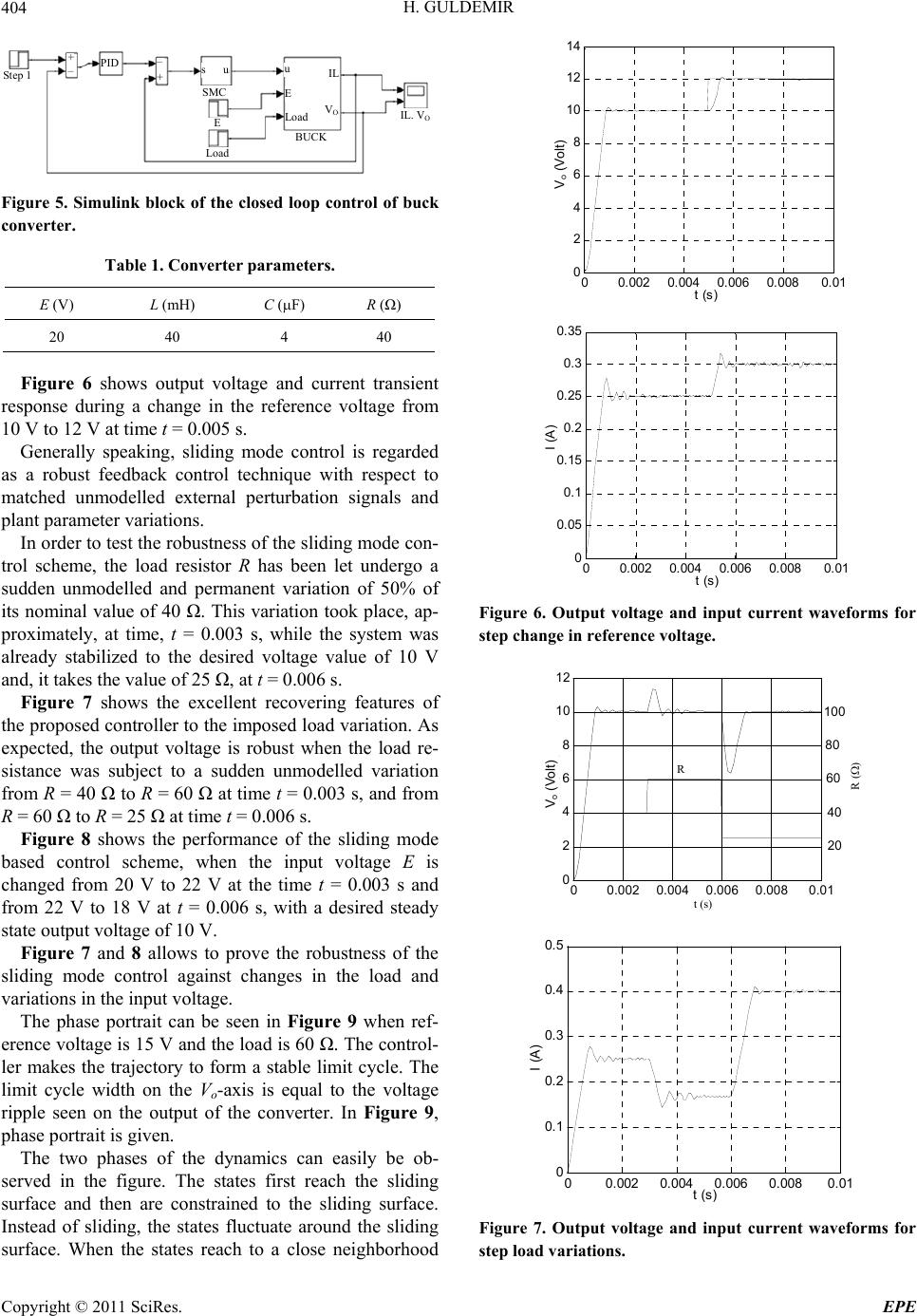
Figure 9. The phase portrait (output voltage vs current
waveforms).
of the sliding surface they don’t stay on the sliding sur-
face, they continuously cross the sliding surface. This
phenomenon is called chattering. This is due to the fact
that control input is not in infinite frequency.
6. Conclusions
A dc-dc buck converter with sliding mode control is
simulated in this study. It allows evaluation of closed
loop performances like tracking the desired output volt-
age. The simulation results show the validity of the slid-
ing mode controlled buck converter model and the ro-
bustness of this control technique against changes in the
load or variations in the input voltage. Therefore the sys-
tem achieves a robust output voltage against load distur-
bances and input voltage variations to guarantee the out-
put voltage to feed the load without instability. Robust-
ness and good dynamic behavior is achieved even for
large supply and load variations.
7. References
[1] A. J. Forsyth, “Modeling and Control of DC-DC Con-
verters,” Power Engineering Journal, Vol. 12, No. 5,
1998, pp. 229-236. doi:10.1049/pe:19980507
[2] P. Mattavelli, L. Rosetto and G. Spiazzi, “Small-Signal
Analysis of Dc-Dc Converters with Sliding Mode Con-
trol,” IEEE Transactions on Power Electronics, Vol. 12,
No. 1, 1997, pp. 96-102. doi:10.1109/63.554174
[3] J. Matas, L. G. Vicuna, O. Lopez, M. Lopez and M. Cas-
tilla, “Sliding-LQR Based Control of Dc-Dc Converters,”
European Power Electronics Conference (EPE’99),
Lausanne, 7-9 September 1999.
[4] G. Spiazzi and P. Mattavelli, “Sliding Mode Control of
Switched-Mode Power Supplies,” CRC Press LLC, Boca
Raton, 2002.
[5] O. Kaynak and F. Harashima, “Disturbance Rejection by
Means of Sliding Mode,” IEEE Transactions on Indus-
trial Applications, Vol. 32, No. 1, 1985, pp. 85-87.
[6] Y. He and F. L. Luo, “Sliding-Mode Control for Dc-Dc
Converters with Constant Switching Frequency,” Control
Theory and Applications, Vol. 153, No. 16, 2006, pp. 37-
45.
[7] Z. H. Akpolat and H. Guldemir, “Trajectory Following
Sliding Mode Control of Induction Motors,” Electrical
Engineering, Vol. 85, No. 4, 2003, pp. 205-209.
doi:10.1007/s00202-003-0166-6
[8] H. Guldemir, “Sliding Mode Speed Control for Dc Drive
Systems,” Mathematical and Computational Applications,
Vol. 8, 2003, pp. 337-384.
[9] H. Guldemir, “Sliding Mode Control of Dc-Dc Boost
Converter,” Journal of Applied Sciences, Vol. 5, No. 3,
2005, pp. 588-592
[10] J. J. Slotine and T. S. Liu, “Applied Nonlinear Control,”
Prentice Hall, Englewood Cliffs, 1991.
[11] J. Y. Hung, W. Gao and J. C. Hung, “Variable Structure
Control: A Survey,” IEEE Transactions on Industrial
Electronics, Vol. 40, No. 1, 1993, pp. 2-21.
doi:10.1109/41.184817
[12] V. Utkin, J. Guldner and J. Shi, “Sliding Mode Control in
Electromechanical Systems,” Taylor and Francis, London,
1999.
[13] V. Utkin, “Sliding Mode Control Design Principles and
Applications to Electric Drives,” IEEE Transactions on
Industrial Applications, Vol. 40, 1993, pp. 23-36.
[14] J. H. Su, J. J. Chen and D. S. Wu, “Learning Feedback
Copyright © 2011 SciRes. EPE