Paper Menu >>
Journal Menu >>
 Journal of Signal and Information Processing, 2011, 2, 245-251 doi:10.4236/jsip.2011.23034 Published Online August 2011 (http://www.SciRP.org/journal/jsip) Copyright © 2011 SciRes. JSIP Stability Conditions of Fuzzy Filter Type III José de Jesús Medel Juárez1, Juan Carlos García Infante2, Juan Carlos Sánchez García2 1Centre of Computing Research, National Polytechnic Institute, Vallejo, México; 2Professional School of Mechanical and Elect r ical Engineering, National Polytechnic Institute, Coyoacan, México. Email: jjmedelj@yahoo.com.mx, jcnet21@yahoo.com , jcs anchezgarcia@gmail.c o m Received October 12th, 2010; revised February 10th, 2011; accepted February 17th, 2011. ABSTRACT A digital fuzzy logic filter of type III interacts with a real model signal reference to obtain the best answer in the sen se of minimum mean square error of the output. The key part of the filter is a fuzzy mechanism that adaptively selects and emits answer according to the changes of the external reference signal. Based on input signal level, this fuzzy filter se- lects the best parameter values from a set of membership in the kno wledg e base (KB), and the filter weights ar e upd ated according to the reference signal in a natural form. With this fuzzy structure the filter reduces error. The simulation result shows the stability of the filter. The states of the filtering process require that all of its answers are bounded by the error criteria probab ilistically. Keywords: Digital Filtering, Fuzzy Systems, Estimation, Stability 1. Introduction One of the best tools used to approximate an external process, is a recursive digital filter that adjusts dynami- cally its parameters and weights to give the best answers with respect to the mean square error criterion [1]. A digital filter is a logic algorithm programmed into com- puter software or electronic to eliminate the noise of a system, taking specific data, identifying system or pre- dicting a system [1,2]. The main problem in conventional filtering operation is that it can’t classify and infer its operation levels with respect to a changing reference system; interpreting its external environment changes in order to select its an- swers with the smallest error and considering different operation levels in dynamical sense, following the natu- ral evolution of the reference system that interacts with the filter. In addition, a conventional filter has not a lin- guistic description to display its answer conditions in human readable formats, which have problems to de- velop capacities with high dynamical changing processes [3]. The systems related to artificial intelligent mecha- nisms should use fuzzy tools (as fuzzy neural net and evolutive systems) to get its own perception giving the best decision answers, using this to solve complex prob- lems, actualizing and adapting its perceptions and an- swers in accordance with a reference dynamical system [4]. The fuzzy intelligent tool as learning techniques in a digital filtering is an option to obtain different decision answer levels to get the optimal answers, having an in- teraction with an external reference dynamical system, adapting its answers to the possible changes by selecting the best values to get the necessary convergence condi- tions, which should have the best operation each time [5]. The main goal of this kind of filter is to have different level answers that describe the reference system opera- tion as natural process, using a rule set. This requires a feedback law in order to follow the basic properties of a desired input signal, adjusting its parameters to give a correct solution dynamically to minimize the error crite- rion response and updates the filter parameters [6]. In the fuzzy filter properties, there is a problem trying to describe the stability conditions of a fuzzy system.But using the Kharitonov [7] theory with the Routh-Hurwitz criterion in order to get the polynomials stability, it will be easier and it could be integrated into the fuzzy stage to demonstrate a system correct operation.Previous work has shown into the simulation description of the filter stability [8,9]. With this perspective, the paper integrates the FDF (Fuzzy Digital Filter) concept, using statistical methods to characterize theKalman filter internal structure to give answers with respect to the operation levels in a natural way making a specific decision to follow the natural ref- erence model using fuzzy logic type III [10]. The paper shows the stability analysis for the fuzzy filter structure  Stability Conditions of Fuzzy Filter Type III Copyright © 2011 SciRes. JSIP 246 to establish the bounds of the filter parameters using the Kharitonov theory with the Ruth-Hurwitz criterion. 2. Fuzzy Intelligence The fuzzy systems obtain their basic ideas since the first advances of fuzzy logic by Zadeh since 1965, with re- spect to the fuzzy sets; Fuzzy systems have an important goal the use of approximation reasoning, establishing a relation using the fuzzy mechanism interacting with the external process. Accord ing with this a fuzzy system has been applied since fifteen years ago to develop new in- telligent technologies that consider a stage that interpret different operational levels [11]. A fuzzy system has stable operations delimiting all its variables and answers into the knowledge base (KB) by the process conditions; a fuzzy system has a memory of all the answer levels given by the process. The answer level classification is using a set of membership func- tions; each one has a specific value in accordance with the operation level interpretation at the input. Using fuzzy rules the logic conn ector if, interprets the inp ut, the fuzzy mechanism deduce the output value and the logic connector then, selects the correct membership function into the KB to updates a process [12]. The fuzzy system first interprets its environment changes at its input to get a specific operation lev el of the reference system, having a characterization of the input signal y k (desired signal) into levels. Then, the fuzzy stage choose the corresponding if-then rule to get the membership function value ˆ ak in order to select the best parameter into the knowledge base, upd ating the process to a new required condition [13]. The fuzzy mechanism shown in Figure 1 describes the reasoning of an external real process operation (reference model) having a set of answerslimitedinto levels. Dy- namically the fuzzy stage interprets its input data de- scribing the external process into different levels. The fuzzy stage has previously the set of all the possible val- ues that can get from its input. Then having this mem- bership grade to deduce the answer value to be selected, automatically makes a selection of the membership value into the knowledge base (this has all possible answers values that it can give), and with this new parameter value updates the process to a new required condition [14]. The characterization of a fuzzy system into levels could describe different kinds of process states (as low, medium or high) in accordance with the variable (temperature, Figure 1. The fuzzy process. velocity or pressure). The fuzzy mechanism dynamically gets a corresponding answer to update a process respect to the input changes. Using the fuzzy rules in order to obtain the input level and get the corresponding answer value ˆ y k. This process considers stable conditions because the characterization of a system uses as limit the frequency distribution probabilistically using a set of membership grades (with trian gle or Gaussian functions) to obtain the operation levels [15]. The membership function in a fuzzy system is a value to choose with the minimum error using the actual input level from the reference process to update the process to a new condition. The operation levels are prev iously into the knowledge base of the fuzzy system as in artificial intelligence using sup ervised learning [16]. The goal of a this kind of systems is to classify an external reference process into grades and get the best corresponding up- dating answer dynamically with the best signal approxi- mation and minimizing the errors [17]. The description of the signal into a fuzzy structure is using ranks limited by the reference system in order to characterize the signal levels as: First using the logic connector IF to get the member- ship grade of the input y k, second using the logic connector THEN to get the corresponding parameter value ˆ ak , third the fuzzy mechanism updates the process to a new condition, and gets the output value described as ˆ y k with the best appr oximation. 3. Fuzzy Digital Filtering The fuzzy filter is an intelligent filter that has two stages basically; the conventional adaptive filter structure con- sidering all its conditions, and the fuzzy stage integrated to the filter structure in order to ch aracterize its operation to get a best signal approximation by levels. This stages integration works together minimizing the error criterion difference having a natural signal description in accor- dance with the reference model changes. On the other hand, a digital filter structure without this fuzzy stage cannot have a characterization of an external process to have a normal operation without get an answer into levels, making difficult to select the best signal ap- proximation with the minimum error. Having this is dif- ficult to interpret the input signal of the external process and to get the best parameter value in order to update the process with the nearest value to have a better natural signal descripti on [1 8] . According with this a fuzzy d igital filter is an adaptive filter adding a fuzzy stage that classifies the input signal y k, into fuzzy grades to select the best filter parame- ter value ˆ ak from the knowledge base in order to update the filter weights dynamically trough time to get the best signal approximation respect to the operation 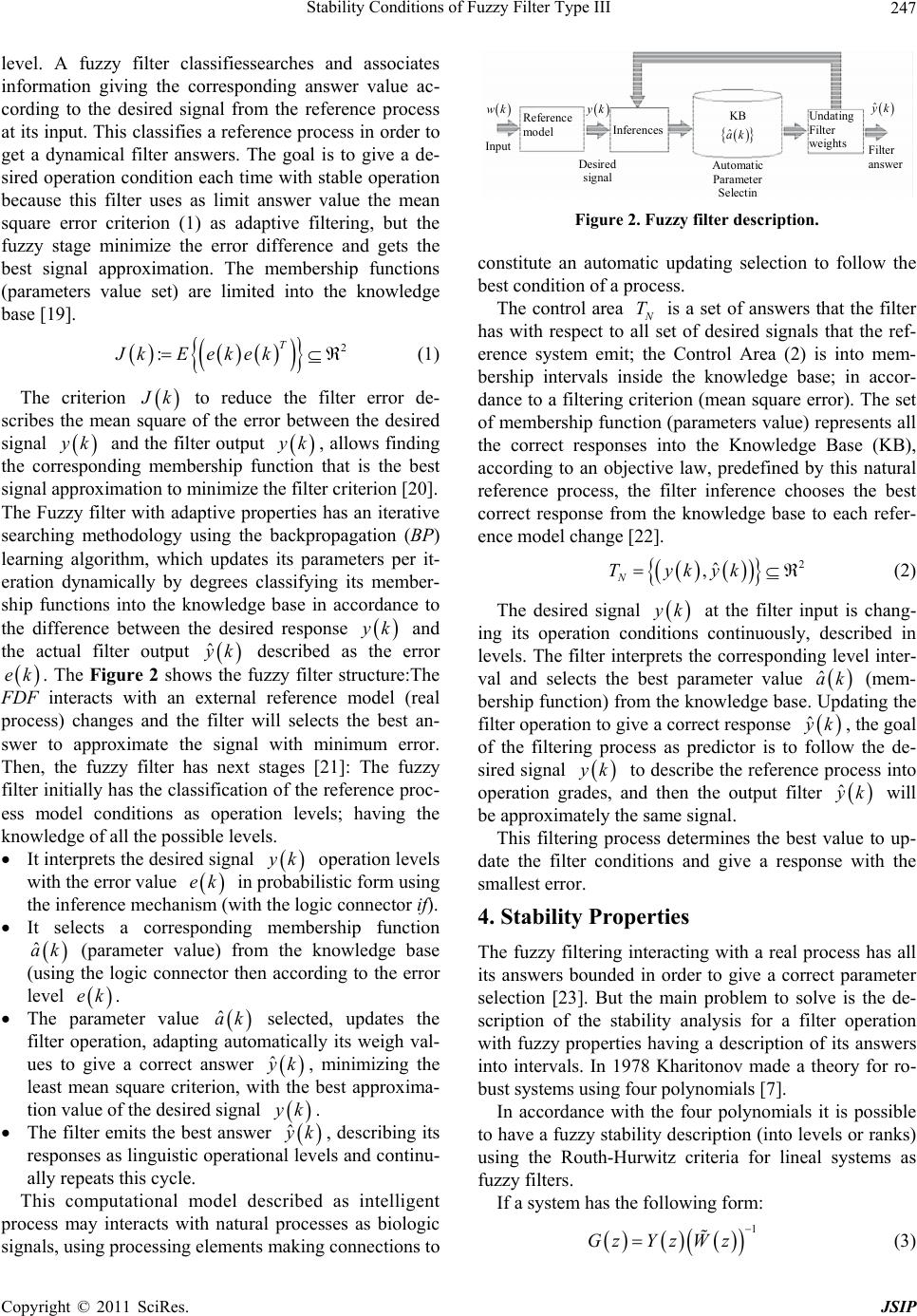 Stability Conditions of Fuzzy Filter Type III Copyright © 2011 SciRes. JSIP 247 level. A fuzzy filter classifiessearches and associates information giving the corresponding answer value ac- cording to the desired signal from the reference process at its input. This classifies a reference process in order to get a dynamical filter answers. The goal is to give a de- sired operation condition each time with stable operation because this filter uses as limit answer value the mean square error criterion (1) as adaptive filtering, but the fuzzy stage minimize the error difference and gets the best signal approximation. The membership functions (parameters value set) are limited into the knowledge base [19]. 2 :T JkE ekek (1) The criterion J k to reduce the filter error de- scribes the mean square of the error between the desired signal y k and the filter output y k, allows finding the corresponding membership function that is the best signal approximation to minimize the filter criterion [20]. The Fuzzy filter with adaptive properties has an iterative searching methodology using the backpropagation (BP) learning algorithm, which updates its parameters per it- eration dynamically by degrees classifying its member- ship functions into the knowledge base in accordance to the difference between the desired response y k and the actual filter output ˆ y k described as the error ek. The Figure 2 shows the fuzzy filter structure:The FDF interacts with an external reference model (real process) changes and the filter will selects the best an- swer to approximate the signal with minimum error. Then, the fuzzy filter has next stages [21]: The fuzzy filter initially has the classification of the reference proc- ess model conditions as operation levels; having the knowledge of all the possible levels. It interprets the desired signal y k operation levels with the error value ek in probabilistic form using the inference mechanism (with the logic connector if). It selects a corresponding membership function ˆ ak (parameter value) from the knowledge base (using the logic connector then according to the error level ek. The parameter value ˆ ak selected, updates the filter operation, adapting automatically its weigh val- ues to give a correct answer ˆ y k, minimizing the least mean square criterion, with the best approxima- tion value of the desired sig na l y k. The filter emits the best answer ˆ y k, describing its responses as linguistic operational lev els and continu- ally repeats this cycle. This computational model described as intelligent process may interacts with natural processes as biologic signals, using proce ss ing elements making connect i ons to Input Reference model Inferences Undating Filter weights Filter answer Automatic Parameter Selecti n Desired signal KB ˆ ak ˆ yk wk yk Figure 2. Fuzzy filter description. constitute an automatic updating selection to follow the best condition of a process. The control area N T is a set of answers that the filter has with respect to all set of desired signals that the ref- erence system emit; the Control Area (2) is into mem- bership intervals inside the knowledge base; in accor- dance to a filtering criterion (mean squ are error). The set of membership function (parameters value) represents all the correct responses into the Knowledge Base (KB), according to an objective law, predefined by this natural reference process, the filter inference chooses the best correct response from the knowledge base to each refer- ence model change [22]. 2 ˆ , N Tykyk (2) The desired signal y k at the filter input is chang- ing its operation conditions continuously, described in levels. The filter interprets the corresponding level inter- val and selects the best parameter value ˆ ak (mem- bership function) from the knowledge base. Updating the filter operation to give a correct response ˆ y k, the goal of the filtering process as predictor is to follow the de- sired signal y k to describe the reference process into operation grades, and then the output filter ˆ y k will be approximately the same signal. This filtering process determines the best value to up- date the filter conditions and give a response with the smallest error. 4. Stability Properties The fuzzy filtering interacting with a real process has all its answers bounded in order to give a correct parameter selection [23]. But the main problem to solve is the de- scription of the stability analysis for a filter operation with fuzzy properties having a description of its answers into intervals. In 1978 Kharitonov made a theory for ro- bust systems using four polynomials [7]. In accordance with the four polynomials it is possible to have a fuzzy stability description (into levels or rank s) using the Routh-Hurwitz criteria for lineal systems as fuzzy filters. If a system has the following form: 1 GzYz Wz (3)  Stability Conditions of Fuzzy Filter Type III Copyright © 2011 SciRes. JSIP 248 where the output equation described as: 1, :i i im Yz bz (4) and its characteristic equation described as: 1, j j jn Wz az (5) with ,mnN Getting from each polynomial the parameter and es- tablishing the uncertainty values as fuzzy systems bounded into intervals. The parameters are: ,, ,lim,lim, nn nnn nn aaaaa aanN (6) From the polynomial described above in Equation (5), in agreement to fuzzy logic parameters and the Khari- tonov theory, we get two polynomials limits: Pair odd WzWzW z (7) Separating the pair and odd form of Equation (5) we get the next polynomials: 24 02 4 135 135 pair odd Wza azaz Wzaz azaz (8) where n aand n a are the limit intervals of each mem- bership function. The nominal value of each interval , nn aa (that is the maximum value of the membership function) is the parameter n a. Having the characteristic equation description in robust sense as: (1) 11 (2) 22 00 ,, ,, nn nnn n n nn Wzaazaaz aa zaa (9) Now the composition of the Kharitonov’s polynomials describing the fuzzy filter stability is: 12 1,30 12 13 345 345 1,4 12 01 2 14 345 345 2,3 12 01 2 23 W z WzWza azaz azazazW z WzWza azaz azazazW z WzWzaazaz 345 345 2,4 12 01 2 24 345 345 azazazW z WzWza azaz az azaz (10) If all of the polynomials complain the Ruth-Hurwitz criteria, the filtering process has stability properties. 5. Simulation For the simulation of the fuzzy filter, we integrate the Kalman filter structure with the fuzzy stage character- izethe filter operation, showing graphically the fuzzy filter operation. The Kalman filter in this case uses the identification configuration, having a dynamical parame- ter selection to approximate the desired signal optimally. The simulation run 1000 iterations and used the set of membership functions deduce all the filter changes lim- ited by the Error Criterion (1).The reference model into the simulation is an Auto Regressive Mobile Average (ARMA) model, which interacts with the fuzzy filter in order to get the best answers. This has a description in discrete states space, expressed by the fifth order differ- ence as: 5 0 1 i x kakixkiwk (11) The fifth order corresponds to k = 5, and its output has the next description: ,,,ykxkvkxk wkk (12) where: x(k – i) is the reference model internal states se- quence, a(k – i) the parameters sequence, w(k) the refer- ence model noise, y(k) the desired signal from the refer- ence model to the filter input, and v(k) the output vector noises. Considering the output recursive form with respect to Equations (11) and (12): y karkwk (13) where: wkfvk i , 1wk, vk 2 , ww N , y k, wk , [1] :10 k aaka [1 ] :10 Tk rk yky and Equation (13) with upper (U) and lower (L) bo u nda ries. , U L ykark wk ykark wk (14) Respectively, where U a and L a are the boundaries corresponding to each membership function. The nomi- nal value set of this interval , L U aa (that is the maxi- mum value of the membership function allowed) is the parameters vector a. Now considering in Equation (13) the Z-transform, the characteristic equation is: 1 0 1T k Wzaz z (15) In robust sens e: 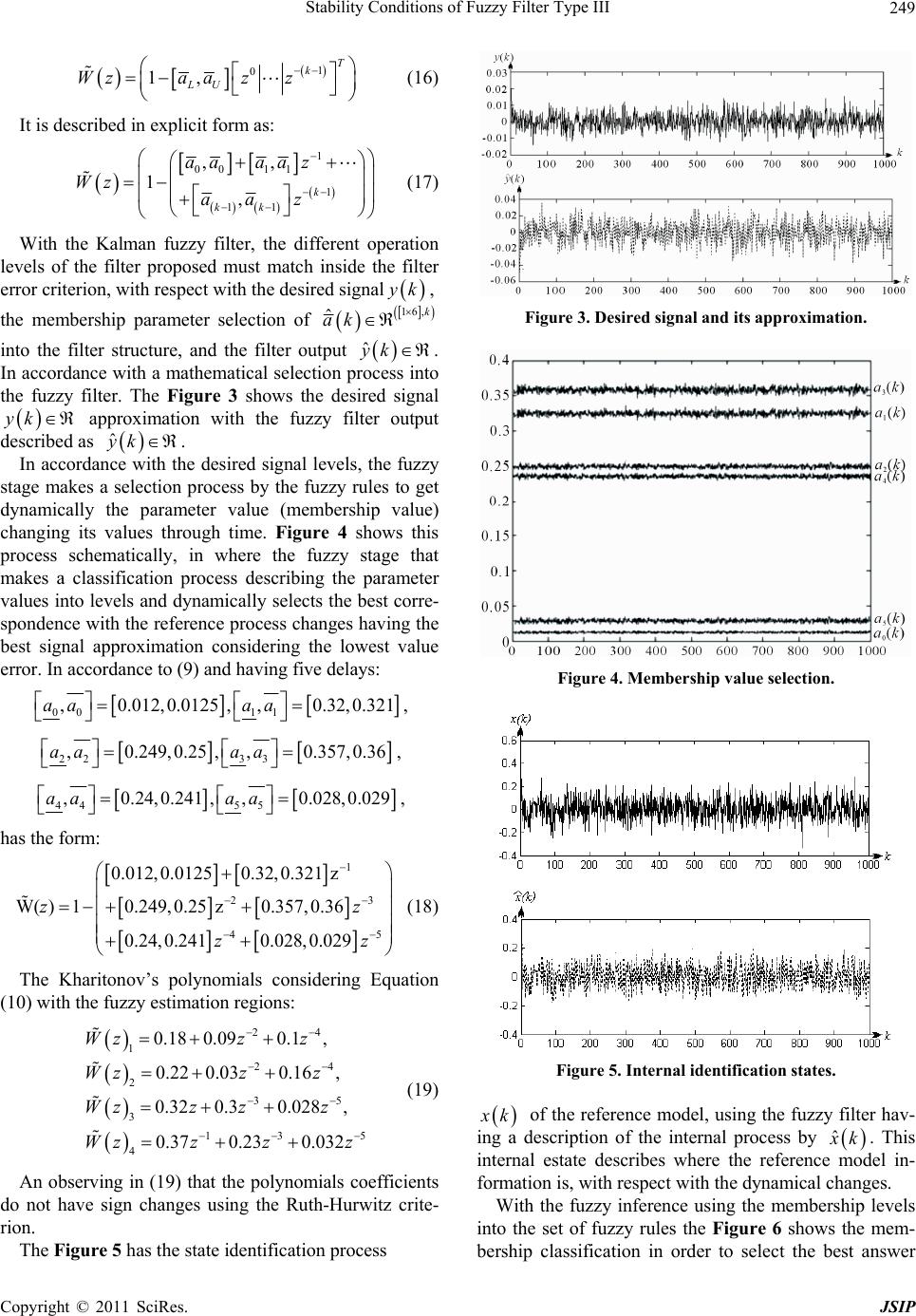 Stability Conditions of Fuzzy Filter Type III Copyright © 2011 SciRes. JSIP 249 1 0 1, T k LU Wzaa zz (16) It is described in explicit form as: 1 00 11 1 11 ,, 1,k kk aa aaz Wz aa z (17) With the Kalman fuzzy filter, the different operation levels of the filter proposed must match inside the filter error criterion, with respect with the desired signal y k, the membership parameter selection of 16, ˆk ak into the filter structure, and the filter output ˆ yk . In accordance with a mathematical selection process into the fuzzy filter. The Figure 3 shows the desired signal yk approximation with the fuzzy filter output described as ˆ yk . In accordance with the desired signal levels, the fuzzy stage makes a selection process by the fuzzy rules to get dynamically the parameter value (membership value) changing its values through time. Figure 4 shows this process schematically, in where the fuzzy stage that makes a classification process describing the parameter values into levels and dynamically selects the best corre- spondence with the reference process changes having the best signal approximation considering the lowest value error. In accordance to (9) and having five delays: 00 11 ,0.012,0.0125 ,,0.32,0.321aa aa , 22 33 ,0.249,0.25 ,,0.357,0.36aa aa , 44 55 ,0.24,0.241 ,,0.028,0.029aa aa , has the form: 1 23 45 0.012,0.01250.32,0.321 z W( )10.249,0.25 z0.357,0.36 0.24,0.241 0.028,0.029 zz zz (18) The Kharitonov’s polynomials considering Equation (10) with the fuzzy estimation regions: 24 1 24 2 35 3 13 5 4 0.18 0.090.1, 0.22 0.030.16, 0.320.30.028 , 0.37 0.23 0.032 Wzz z Wzz z Wzz zz Wzzzz (19) An observing in (19) that the polynomials coefficients do not have sign changes using the Ruth-Hurwitz crite- rion. The Figure 5 has the state identification process Figure 3. Desired signal and its approximation. Figure 4. Membership value selection. Figure 5. Internal identification states. x k of the reference model, using the fuzzy filter hav- ing a description of the internal process by ˆ x k. This internal estate describes where the reference model in- formation is, with respect with the dynamical changes. With the fuzzy inference using the membership levels into the set of fuzzy rules the Figure 6 shows the mem- bership classification in order to select the best answer 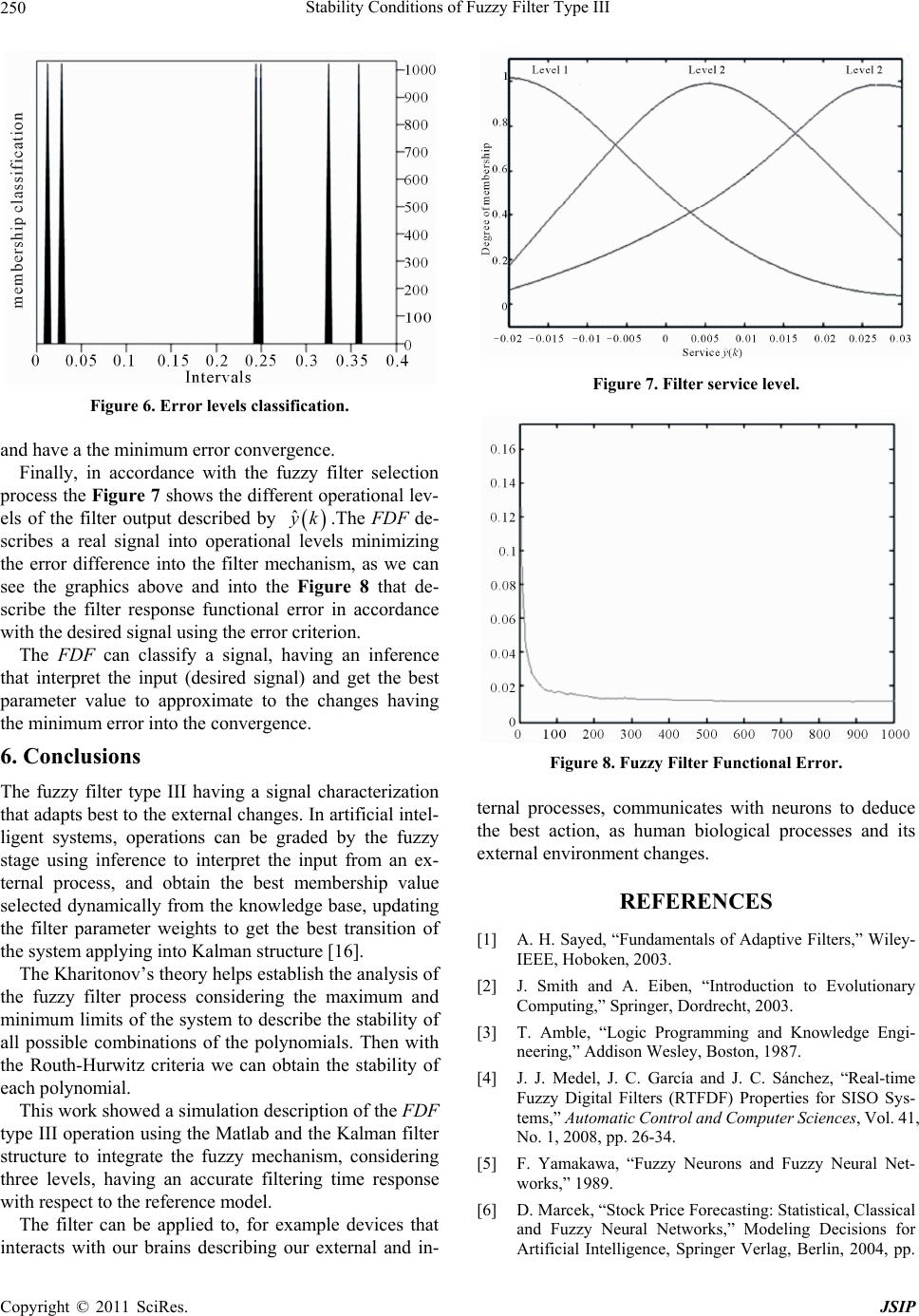 Stability Conditions of Fuzzy Filter Type III Copyright © 2011 SciRes. JSIP 250 Figure 6. Error levels classification. and have a the minimum error convergence. Finally, in accordance with the fuzzy filter selection process the Figure 7 shows the different operational lev- els of the filter output described by ˆ y k.The FDF de- scribes a real signal into operational levels minimizing the error difference into the filter mechanism, as we can see the graphics above and into the Figure 8 that de- scribe the filter response functional error in accordance with the desired signal using the error criterion. The FDF can classify a signal, having an inference that interpret the input (desired signal) and get the best parameter value to approximate to the changes having the minimum error into the convergence. 6. Conclusions The fuzzy filter type III having a signal characterization that adapts best to the external changes. In artificial intel- ligent systems, operations can be graded by the fuzzy stage using inference to interpret the input from an ex- ternal process, and obtain the best membership value selected dynamically from the knowledge base, updating the filter parameter weights to get the best transition of the system applying into Kalman structure [16]. The Kharitonov’s theory helps establish the analysis of the fuzzy filter process considering the maximum and minimum limits of the system to describe the stability of all possible combinations of the polynomials. Then with the Routh-Hurwitz criteria we can obtain the stability of each polynomial. This work showed a simulation description of the FDF type III operation using the Matlab and the Kalman filter structure to integrate the fuzzy mechanism, considering three levels, having an accurate filtering time response with respect to the reference model. The filter can be applied to, for example devices that interacts with our brains describing our external and in- Figure 7. Filter service level. Figure 8. Fuzzy Filter Functional Error. ternal processes, communicates with neurons to deduce the best action, as human biological processes and its external environment changes. REFERENCES [1] A. H. Sayed, “Fundamentals of Adaptive Filters,” Wiley- IEEE, Hoboken, 2003. [2] J. Smith and A. Eiben, “Introduction to Evolutionary Computing,” Springer, Dordrecht, 2003. [3] T. Amble, “Logic Programming and Knowledge Engi- neering,” Addison Wesley, Boston, 1987. [4] J. J. Medel, J. C. García and J. C. Sánchez, “Real-time Fuzzy Digital Filters (RTFDF) Properties for SISO Sys- tems,” Automatic Control and Computer Sciences, Vol. 41 , No. 1, 2008, pp. 26-34. [5] F. Yamakawa, “Fuzzy Neurons and Fuzzy Neural Net- works,” 1989. [6] D. Marcek, “Stock Price Forecasting: Statistical, Classical and Fuzzy Neural Networks,” Modeling Decisions for Artificial Intelligence, Springer Verlag, Berlin, 2004, pp. 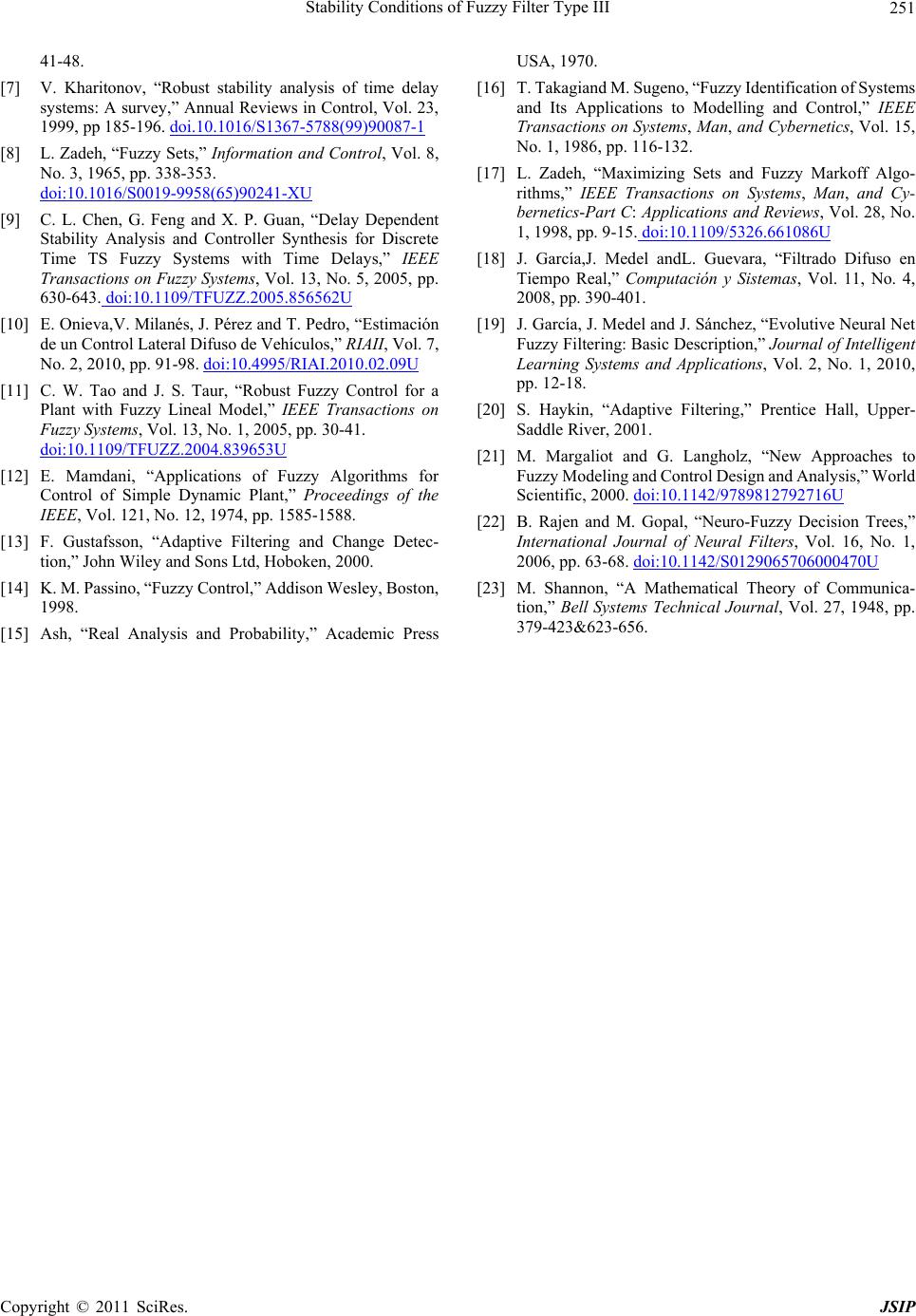 Stability Conditions of Fuzzy Filter Type III Copyright © 2011 SciRes. JSIP 251 41-48. [7] V. Kharitonov, “Robust stability analysis of time delay systems: A survey,” Annual Reviews in Control, Vol. 23, 1999, pp 185-196. doi.10.1016/S1367-5788(99)90087-1 [8] L. Zadeh, “Fuzzy Sets,” Information and Control, Vol. 8, No. 3, 1965, pp. 338-353. doi:10.1016/S0019-9958(65)90241-XU [9] C. L. Chen, G. Feng and X. P. Guan, “Delay Dependent Stability Analysis and Controller Synthesis for Discrete Time TS Fuzzy Systems with Time Delays,” IEEE Transactions on Fuzzy Systems, Vol. 13, No. 5, 2005, pp. 630-643. doi:10.1109/TFUZZ.2005.856562U [10] E. Onieva,V. Milanés, J. Pérez and T. Pedro, “Estimación de un Control Lateral Difuso de Vehículos,” RIA II, Vol. 7, No. 2, 2010, pp. 91-98. doi:10.4995/RIAI.2010.02.09U [11] C. W. Tao and J. S. Taur, “Robust Fuzzy Control for a Plant with Fuzzy Lineal Model,” IEEE Transactions on Fuzzy Systems, Vol. 13, No. 1, 2005, pp. 30-41. doi:10.1109/TFUZZ.2004.839653U [12] E. Mamdani, “Applications of Fuzzy Algorithms for Control of Simple Dynamic Plant,” Proceedings of the IEEE, Vol. 121, No. 12, 1974, pp. 1585-1588. [13] F. Gustafsson, “Adaptive Filtering and Change Detec- tion,” John Wiley and Sons Ltd, Hoboken, 2000. [14] K. M. Passino, “Fuzzy Control,” Addison Wesley, Boston, 1998. [15] Ash, “Real Analysis and Probability,” Academic Press USA, 1970. [16] T. Tak agiand M. Sugeno, “Fuzzy Identification of Systems and Its Applications to Modelling and Control,” IEEE Transactions on Systems, Man, and Cybernetics, Vol. 15, No. 1, 1986, pp. 116-132. [17] L. Zadeh, “Maximizing Sets and Fuzzy Markoff Algo- rithms,” IEEE Transactions on Systems, Man, and Cy- bernetics-Part C: Applications and Reviews, Vol. 28, No. 1, 1998, pp. 9-15. doi:10.1109/5326.661086U [18] J. García,J. Medel andL. Guevara, “Filtrado Difuso en Tiempo Real,” Computación y Sistemas, Vol. 11, No. 4, 2008, pp. 390-401. [19] J. García, J. Medel and J. Sánchez, “Evolutive Neural Net Fuzzy Filtering: Basic Description,” Journal of Intelligent Learning Systems and Applications, Vol. 2, No. 1, 2010, pp. 12-18. [20] S. Haykin, “Adaptive Filtering,” Prentice Hall, Upper- Saddle River, 2001. [21] M. Margaliot and G. Langholz, “New Approaches to Fuzzy Modeling and Control Design and Analysis,” World Scientific, 2000. doi:10.1142/9789812792716U [22] B. Rajen and M. Gopal, “Neuro-Fuzzy Decision Trees,” International Journal of Neural Filters, Vol. 16, No. 1, 2006, pp. 63-68. doi:10.1142/S0129065706000470U [23] M. Shannon, “A Mathematical Theory of Communica- tion,” Bell Systems Technical Journal, Vol. 27, 1948, pp. 379-423&623-656. |