 Applied Mathematics, 2011, 2, 1105-1113 doi:10.4236/am.2011.29152 Published Online September 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM A Strong Method for Solving Systems of Integro-Differential Equations Jafar Biazar, Hamideh Ebrahimi Department of Ap pl i e d M athematics, Faculty of Mathematical Science, University of Guilan, Rasht, Iran E-mail: biazar@guilan.ac.ir, ebrahimi.hamideh@gmail.com Received June 5, 2011; revised June 28, 2011; accepted July 6, 2011 Abstract The introduced method in this paper consists of reducing a system of integro-differential equations into a system of algebraic equations, by expanding the unknown functions, as a series in terms of Chebyshev wave- lets with unknown coefficients. Extension of Chebyshev wavelets method for solving these systems is the novelty of this paper. Some examples to illustrate the simplicity and the effectiveness of the proposed method have been presented. Keywords: Systems of Integro-Differential Equations, Chebyshev Wavelets Method, Mother Wavelet, Op- erational Matrix 1. Introduction In recent years, many different orthogonal functions and polynomials have been used to approximate the solution of various functional equations. The main goal of using or- thogonal basis is that the equation under study reduces to a system of linear or non-linear algebraic equations. This can be done by truncating series of functions with orthogonal basis for the solution of equations and using the operational matrices. In this paper, Chebyshev wavelets basis, on the interval [0, 1], have been considered for solving systems of integro-differential equations. There are some applications of Chebyshev wavelets method in the literature [1-3]. Systems of integro-differential equations arise in ma- thematical modeling of many phenomena. Some tech- niques have been used for solving these systems such as, Adomian decomposition method (ADM) [4], He’s homo- topy perturbation method (HPM) [5,6], variational iteration method (VIM) [7], The Tau method [8,9], differential transform method (DTM ) [10], power series method, ra- tionalized Haar functions method and Galerkin method for linear systems [11-13]. The general form of these systems are considered as follows 1) Systems of Volterra integro-differential equations 1 2 11 1 1 ,,11 0 1 ,,,, ,, ,,,,, 01, 1,2,,, m mm ii ikn k mxmm ij ijn j uxfx Fxuxux ux ux kxtGut ut utt xi n d, m d, m (1) 2) Systems of Fredholm integro-differential equations 1 2 11 1 1 1 ,,11 0 1 (),,,, , ,,,,, 01,1,2,,, m mm ii ikn k mmm ij ijn j uxfxF xuxuxuxux kxtGut ut utt xi n (2) where , and are positive integers, m1 m2 m 2 ,0,10, ij kxt L1 are the kernels,  J. BIAZAR ET AL. 1106 , ,1,2,, i xi n are known functions, ik and are linear or non-linear functions and are unknown functions. ij G ,1,2,, i uxi n, This paper is organized as follows: in Section 2, Che- byshev wavelets method is explained. In Section 3, the application of the method for introduced systems (1) and (2) is studied. Some numerical examples are presented in Section 4, Conclusions are presented in Section 5. 2. Wavelets and Chebyshev Wavelets Wavelets constitute a family of functions constructed from dilation and translation of a single function called the mother wavelet [14,15]. When the dilation parameter a and the translation parameter b vary continuously we have the following family of continuous wavelets 1 2 ,,,, ab xb xaab a a 0. (3) Chebyshev wavelets ,,, , nm knmx 1 ,,2 kk have four arguments, , is an arbitrary positive integer andm is the order of Chebyshev polynomials of the first kind. They are defined on the interval [0,1], as fo 1,2n llows: 2 11 ,, , 1 2(2 21), 22 0, otherwise nm kk mkk xknmx nn Txn x , (4) where 1,0 π 2,0 π m m m Tx Tx m , . 1, (5) For and . m are the famous Chebyshev polynomials of the first kind of degree m, which construct an orthogonal system with respect to the weight function 0,1,,1mM ,0,1,,TxmM 1 1,2,,2 k n 2 1 1 Wx , on the interval 1,1, and satisfy the following recursive formula: 0 1 11 1, , 2, mmm Tx Tx x Tx xTxTxm 1,2, . (6) The set of Chebyshev wavelets is an orthogonal set with respect to the weight function 221 k n Wx Wxn A function x defined on the interval [0, 1] may be presented as 10 , nm nm nm xc x (7) where ,n nmnm Wx cfx x . Series presentation (7), can be approximated by the following truncated se- ries. 1 21 10 , kMT nm nm nm xcxC x (8) where C and are1 2 k1 matrices given by 11 1 10 111 1 202121 T 202 1 T 121 2 ,,,, ,,,, ,,, ,,,,,, C kk k MM M MM M ccc ccc cc ccc cc , (9) and 11 1 10111, 12021 T 2, 120 2,1 T 121 2 ,,,, ,, ,,,,, ,,,,,, . kk k M MM MM M x xx xxx xx x xxx xx (10) Also a function , xy defined on 0,1 0,1 can be approximated as the following ,.T xyxK y (11) Here the entries of matrix 11 22 kk ij M Kk will be obtained by , 1 ,,, ,1,,2 . nn ijij Wy Wx k kxfxyy ij M , (12) The integration of the vector , defined in (10), can be achieved as 0d xttP x . (13) where P is the 11 22 kk M operational matrix of integration [1,2]. This matrix is determined as follows. , FF F OLF POOL F OOOL (14) Copyright © 2011 SciRes. AM  J. BIAZAR ET AL. Copyright © 2011 SciRes. AM 1107 where F, and O are M matrices given by 11 2 20 00 22 00 3 2 11 11 200 21 1 11 11 200 22 F krr MM rr MM 0 0 , 3. Application of Chebyshev Wavelets Method In this section the introduced method will be applied to solve systems (1) and (2). 3.1. Application to Solve System (1) Consider system of integro-differential Equations (1), with the following conditions (15) 00 0 00 0 , 00 0 O (16) The property of the product of two Chebyshev wave- lets vector functions will be as follows . T xY Yx (18) where is a given vector and is a Y Y11 22 kk M matrix. This matrix is called the operational matrix of product. The integration of the product of two Cheby- shev wavelets vector functions with respect to the weight function is derived as , n Wx 1 0dI T n Wx xxx , 1. (19) 0, 1,,,0,, s iis uainsm n . (20) First we assume the unknown functions are approximated in the follow- ing forms ,1,2,, m i uxi ,1,2,, mT ii uxC xin (21) Therefore we have 1 0 , ! 1, ,,0, ,1. j ms sTms ii is j uxCP xa j insm (22) Using (20) and (21) other terms will be considered as the following general expansions 11 1 11 12 , ,,,,,, ,, , ,,,, ,,, ,, 1,2, ,,1,2, ,,1,2, ,. T ii mm ikn n T ik mm T ijn n ij T ij ij fx Fx xuxux uxuxux Xx GututututYt kxtxKt ink mjm where is an identity matrix. I 11 2 1 1000 2 21 000 0 44 211 00 0 326 2, 11 21 00 0 21 12121 11 21 000 0 22 22 L k rr MM rrr r MM M 0 1 (17)  J. BIAZAR ET AL. Copyright © 2011 SciRes. AM 1108 where i and ij are known matrices, ij and are column vectors of elements of the vectors . ij Y ,1,, i Ci n Substituting these approximations into system (1), leads to 1 2 1 2 12 1 0 1 1 0 1 11 12 () d d , 1,2, ,,1,2, ,,1,2, ,. T m TT T ii ik k mxTT ij ij j m TT iik k mx TT ij ij j mm TT T iik ijij kj CxFxX x xKtYt t FxX x xKtYt t xXx xKPx inkmjm 11kk (23) where are Tij 22 M T Wxx matrices. Multiplying , in to both sides of the n 1 system (23) and applying 0.d, a linear or a non- linear system, in terms of the entries of , will be obtained and the elements of vectors can be obtained by solving this sys- tem. ,1,2,, i Ci n ,1,2,, i Ci n 3.2. Solving the System (2) Consider the system of integro-differential Equations (2) subject to the conditions (20). To solve this system, let’s considered the unknown functions as a linear combination of Chebyshev wavelets, by the following ,1,2,, m i uxin . ,1,2,, mT ii ux xCin (24) and we have 1 0 , ! 1, ,,0,,1 j ms ms sTT ii j x uxxP Ca j ins m is (25) Therefore the following general expansions are achieved. 11 1 11 12 , ,,,,, ,,, , ,,,, ,,, ,, 1,2, ,,1,2, ,,1,2,,. T ii mm ikn n Tik mm T ijn nij T ij ij fx xF xuxuxuxuxux xX Gutu tutu txY kxtxK t inkmj m Substitution of these approximations into the system (2), would be obtained results in 1 2 1 2 12 1 1 0 1 1 1 0 1 11 () d d , 1, 2,...,, m TTT ii ik k mTT ij ij j m TT iik k m TT ij ij j mm TTT iik kj xC xFxX xKttY t xFx X xKt ttY ijij FxXxK in DY (26) where is a D11 22 kk M matrix. Multiplying both sides of the system (26) by n Wx x and applying 0 1.d, the following linear or non-linear system will be obtained 12 11 ,1, 2,...,, mm ii ikijij kj CF XKDYin (27) Solving system (27) the entries of , will be obtained. ,1,2,, i Ci n Also one can check the accuracy of the method. Since the truncated Chebyshev wavelets series are approximate the solutions of the systems (1) and (2), so the error function i eu x is constructed as follows 1 21 10 . kMi iinm nm nm eu xu xcx (28) If we set x where 0,1 j x, the error values can be obtained. 4. Numerical Results In this section some systems of integro-differential equa- tions are considered and solved by the introduced method. Parameters and k are considered to be 1 and 6 respectively. Example 1: Consider the following linear system of Fredholm integro-differential equations 1 0 2 12 0 23d 3 38, 10 322 d 4 21, 01. 5 ux vxxtutvtt xx vx uxxtutvtt xx (29)  J. BIAZAR ET AL.1109 1 Subject to initial conditions and .The exact solutions are and [8]. 01,00,01uu v 2 3uxx 02v vx321x x Let’s 12 1 22 2 1 2 10 2 2 2 20 2 12 2 12 ,, , 2, 1 , 21 , 2,32 34 38 ,21, 10 5 TT TT TTTT T TT TT T TT TT T TT TT ux xCvx xC ux xPC vx xPCxPC xV uxx PC xP CxU vxx PCx xP CxV 1 , txKt xtxKt xx xFxxF Substituting into (28), the following linear system will be obtained 121 22 11020 12 22 210 20 33 2(2 . T TT T TT CPCV KDPC UPCVF PC C 1 2 , DP CUP CVF . Solving this system; the solutions would be achieved as follows 22 113 1, TT uxx PCx 23 22121 TT vxx PCxxx This is the exact solution. Example 2: Consider the following non-linear system of Fredholm integro-differential equations with the exact solutions and 21ux x e vx and boundary conditions 01, 00 uu and 01v 01v . 12 0 13 0 233 42d 213 4e 2e, 15 6 1 3d 2 71 119 e3eee , 66 918 01, x x uxvxxtutxtvt t xx vxuxxtutvtxtvt t xx x x (30) In this example, let’s take 1 2 1 22 22 11 , , , 1, 1 T T TT TTTT T TTTTT ux xC vx xC ux xPC vx xPCxPCxV uxxPCx PCxV 1 1 2 2 2 20 2 12 3 3 12 3 1 233 2 1 , ,, , ,2 , , 213 4e 2e, 15 6 71 119 e3eee 66 918 TT TTT TT T TT T xT xT vxx PCx xP CxV uxxY uxvxxY vx xY xtxK txtxKt xtxKt xx xF . xx xF Applying the Chebyshev wavelets method, the fol- lowing non-linear system will be obtained 2 12011221 2 2113213 44 11 33 22 TT T CPCVKDYKDPCVF CPCVKDYKDYF 1 2 , . Solving this system the following results would be achieved. 1,0 1,1 7 1,21, 3 77 1, 41, 5 2,0 2,1 2,2 2,3 2.506705578,0.00009696248441, 0.00001788458767,5.080260046 10, 1.44917065510 ,2.37389501710 , 2.197451850, 0.7536322881, 0.09324678580, 0.0077327666 cc cc cc cc cc 2,4 2,5 17, 0.0004818914245, 0.00002403741177.cc Therefore, the following approximate solutions will be achieved. 54 32 8 0.000001345778125 0.00001026370827 0.00001182646441 0.9999858747 1.336715265 101, ux x x xx 54 32 0.01391739110 0.03477166926 0.1704167644 0.49905851211. xx xx v x x Plots of the exact and approximate solutions are pre- Copyright © 2011 SciRes. AM 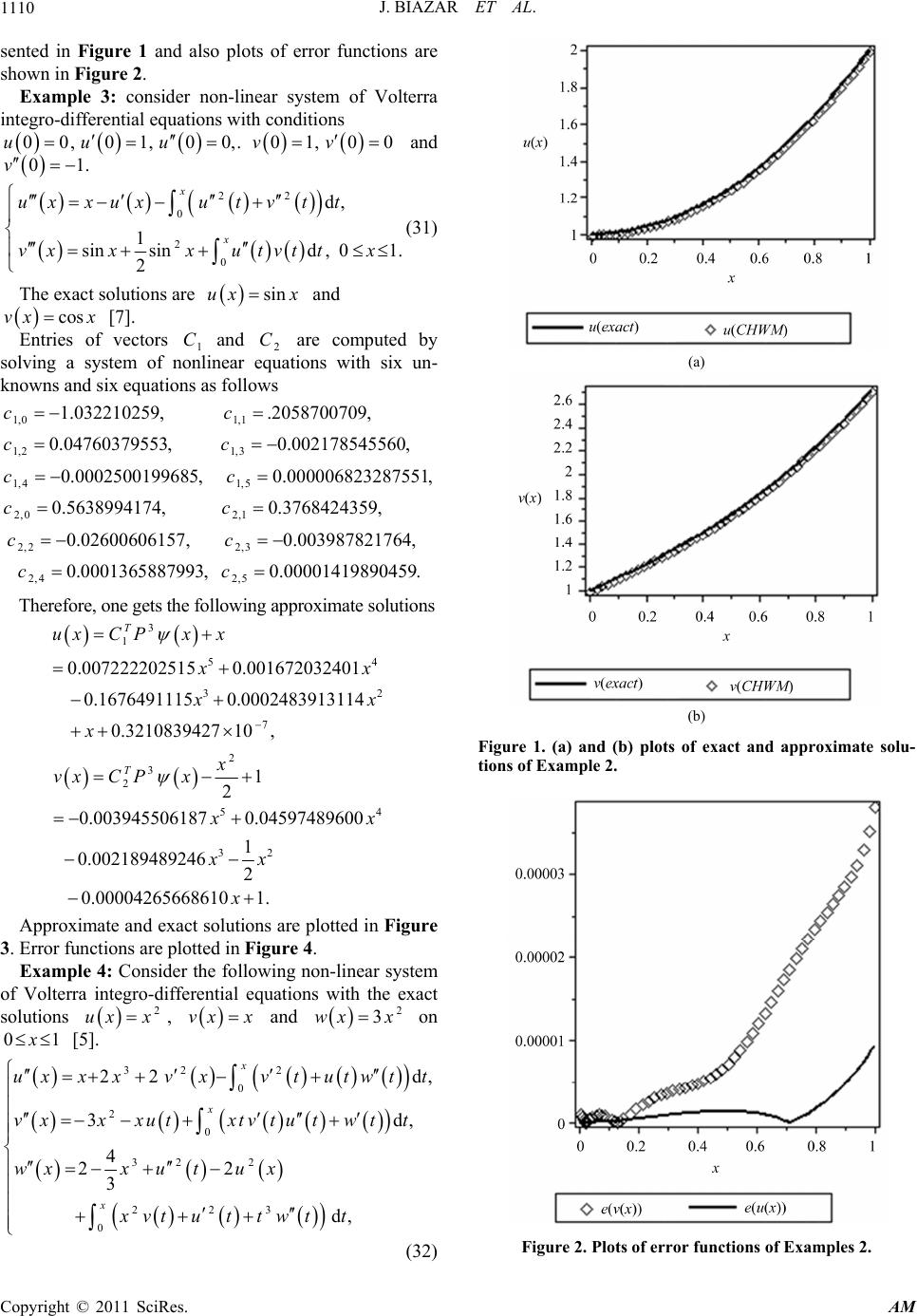 J. BIAZAR ET AL. 1110 sented in Figure 1 and also plots of error functions are shown in Figure 2. Example 3: consider non-linear system of Volterra integro-differential equations with conditions 00,01,00,uuu . 01, 00vv and 01.v 22 0 2 0 d, 1 sinsind ,01. 2 x x uxxuxut vtt vxxx utvttx (31) The exact solutions are and [7]. sinux x C cosvx x Entries of vectors 1 C and 2 are computed by solving a system of nonlinear equations with six un- knowns and six equations as follows 1,0 1,1 1,21, 3 1, 41, 5 2,0 2,1 2,2 2,3 2, 1.032210259.2058700709 0.04760379553 0.002178545560 0.0002500199685 0.000006823287551 .5638994174 .3768424359 0.0260060615 ,, ,, ,, 7 0.00398782176 ,0, ,,4 0 cc cc cc cc cc c 42,5 0.00013658879930.0000141989 5,.04 9c Therefore, one gets the following approximate solutions 3 32 7 1 54 0.007222202515 0.001672032401 0.1676491115 0.0002483913114 0.3210839427 10, T x x uxCPx x x 2 3 4 3 2 5 2 0.003945506187 0.04597489600 1 0.002189489246 2 0.000042656686 10 1 2 1. T x xx x xC x vPx Approximate and exact solutions are plotted in Figure 3. Error functions are plotted in Figure 4. Example 4: Consider the following non-linear system of Volterra integro-differential equations with the exact solutions , 2 ux x vx x and on 2 3wxx 01 [5]. 322 0 2 0 32 2 223 0 22 d 3d , 4 22 3 d, x x x uxxxvxv tutwtt vxxxutxtvtutwtt wxxutu x xvtuttwtt , (32) (a) (b) Figure 1. (a) and (b) plots of exact and approximate solu- tions of Example 2. Figure 2. Plots of error functions of Examples 2. Copyright © 2011 SciRes. AM 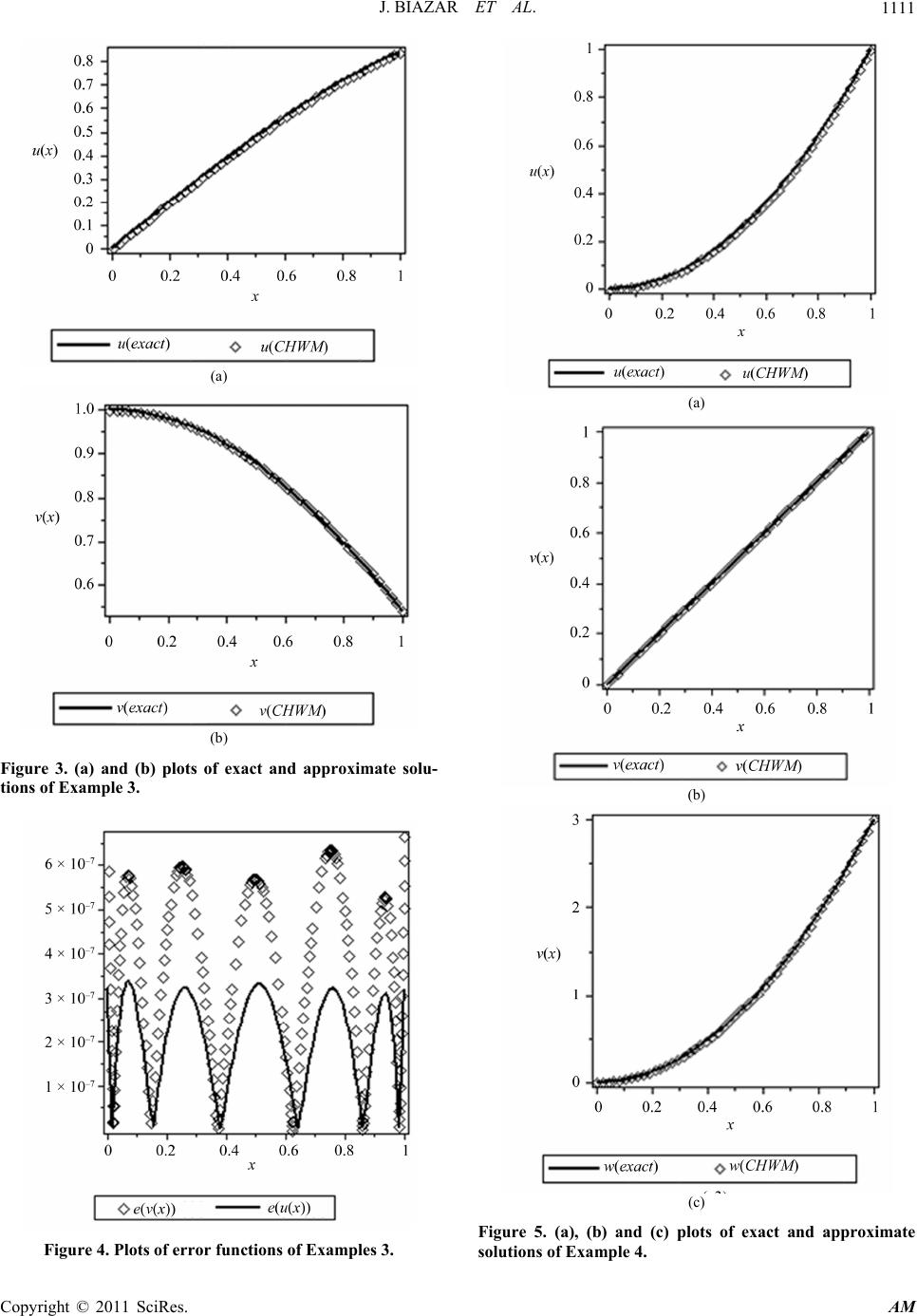 J. BIAZAR ET AL.1111 (a) (b) Figure 3. (a) and (b) plots of exact and approximate solu- tions of Example 3. Figure 4. Plots of error functions of Examples 3. (a) (b) (c) Figure 5. (a), (b) and (c) plots of exact and approximate solutions of Example 4. Copyright © 2011 SciRes. AM 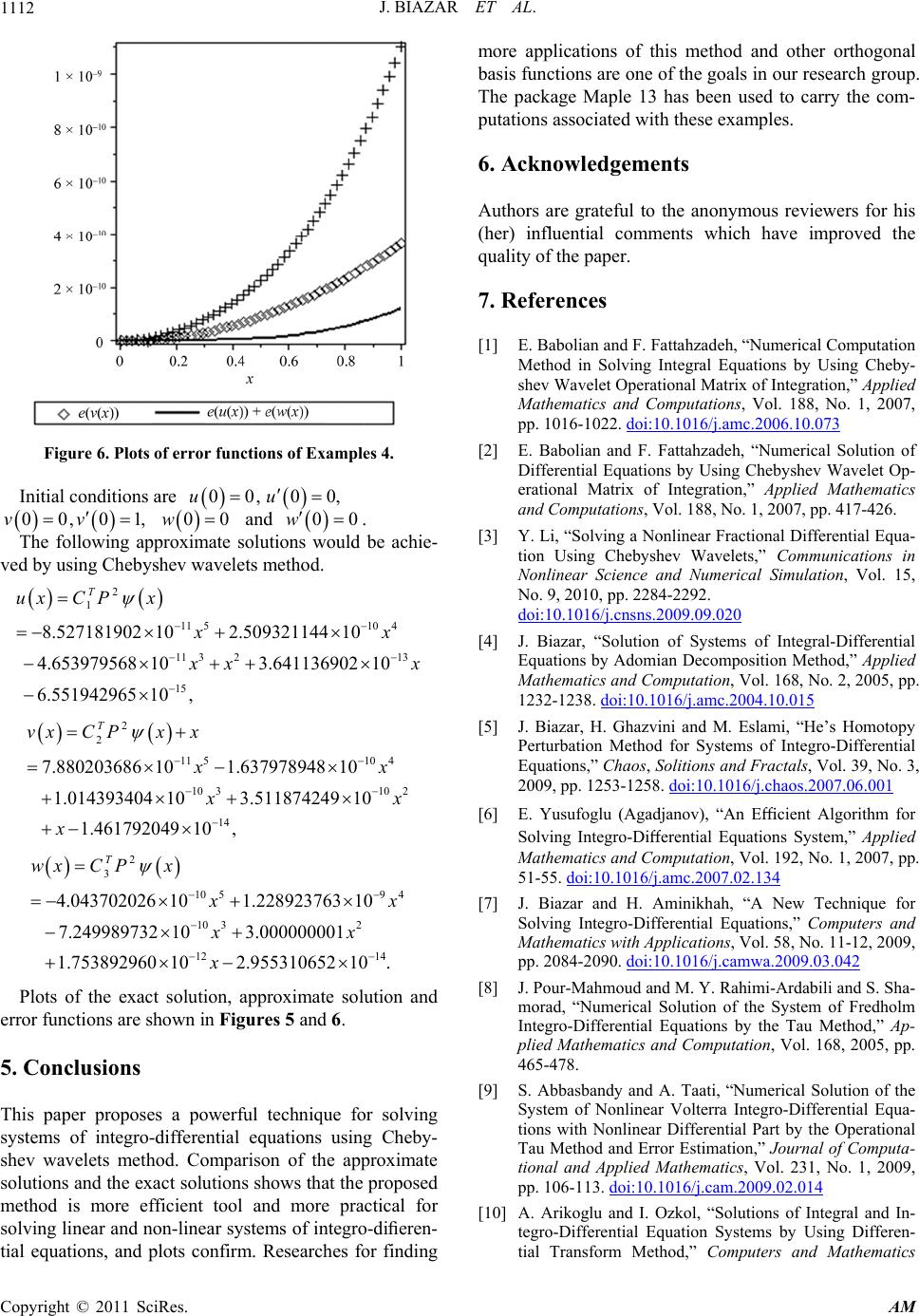 J. BIAZAR ET AL. 1112 Figure 6. Plots of error functions of Examples 4. Initial conditions are 00,00uu , 00 0w and . 00,01vv ,w0 The following approximate solutions would be achie- ved by using Chebyshev wavelets method. 11 5104 11 3 2 2 5 1 3 1 8.527181902102.509321144 10 4.653979568 103.641136902 10 6.5519429650 ,1 T ux x x P x x Cx 1 11 5104 1 2 2 03 102 14 7.880203686101.637978948 10 1.014393404 103.511874249 10 1.461792049 10, T x x vxCPx x x 1 4 10 59 4 10 3 2 2 1 3 2 4.043702026101.228923763 10 7.249989732 103.000000001 1.753892960 102.9553106520.1 T wx CP x xx x x Plots of the exact solution, approximate solution and error functions are shown in Figures 5 and 6. 5. Conclusions This paper proposes a powerful technique for solving systems of integro-differential equations using Cheby- shev wavelets method. Comparison of the approximate solutions and the exact solutions shows that the proposed method is more efficient tool and more practical for solving linear and non-linear systems of integro-difieren- tial equations, and plots confirm. Researches for finding more applications of this method and other orthogonal basis functions are one of the goals in our research group. The package Maple 13 has been used to carry the com- putations associated with these examples. 6. Acknowledgements Authors are grateful to the anonymous reviewers for his (her) influential comments which have improved the quality of the paper. 7. References [1] E. Babolian and F. Fattahzadeh, “Numerical Computation Method in Solving Integral Equations by Using Cheby- shev Wavelet Operational Matrix of Integration,” Applied Mathematics and Computations, Vol. 188, No. 1, 2007, pp. 1016-1022. doi:10.1016/j.amc.2006.10.073 [2] E. Babolian and F. Fattahzadeh, “Numerical Solution of Differential Equations by Using Chebyshev Wavelet Op- erational Matrix of Integration,” Applied Mathematics and Computations, Vol. 188, No. 1, 2007, pp. 417-426. [3] Y. Li, “Solving a Nonlinear Fractional Differential Equa- tion Using Chebyshev Wavelets,” Communications in Nonlinear Science and Numerical Simulation, Vol. 15, No. 9, 2010, pp. 2284-2292. doi:10.1016/j.cnsns.2009.09.020 [4] J. Biazar, “Solution of Systems of Integral-Differential Equations by Adomian Decomposition Method,” Applied Mathematics and Computation, Vol. 168, No. 2, 2005, pp. 1232-1238. doi:10.1016/j.amc.2004.10.015 [5] J. Biazar, H. Ghazvini and M. Eslami, “He’s Homotopy Perturbation Method for Systems of Integro-Differential Equations,” Chaos, Solitions and Fractals, Vol. 39, No. 3, 2009, pp. 1253-1258. doi:10.1016/j.chaos.2007.06.001 [6] E. Yusufoglu (Agadjanov), “An Efficient Algorithm for Solving Integro-Differential Equations System,” Applied Mathematics and Computation, Vol. 192, No. 1, 2007, pp. 51-55. doi:10.1016/j.amc.2007.02.134 [7] J. Biazar and H. Aminikhah, “A New Technique for Solving Integro-Differential Equations,” Computers and Mathematics with Applications, Vol. 58, No. 11-12, 2009, pp. 2084-2090. doi:10.1016/j.camwa.2009.03.042 [8] J. Pour-Mahmoud and M. Y. Rahimi-Ardabili and S. Sha- morad, “Numerical Solution of the System of Fredholm Integro-Differential Equations by the Tau Method,” Ap- plied Mathematics and Computation, Vol. 168, 2005, pp. 465-478. [9] S. Abbasbandy and A. Taati, “Numerical Solution of the System of Nonlinear Volterra Integro-Differential Equa- tions with Nonlinear Differential Part by the Operational Tau Method and Error Estimation,” Journal of Computa- tional and Applied Mathematics, Vol. 231, No. 1, 2009, pp. 106-113. doi:10.1016/j.cam.2009.02.014 [10] A. Arikoglu and I. Ozkol, “Solutions of Integral and In- tegro-Differential Equation Systems by Using Differen- tial Transform Method,” Computers and Mathematics Copyright © 2011 SciRes. AM 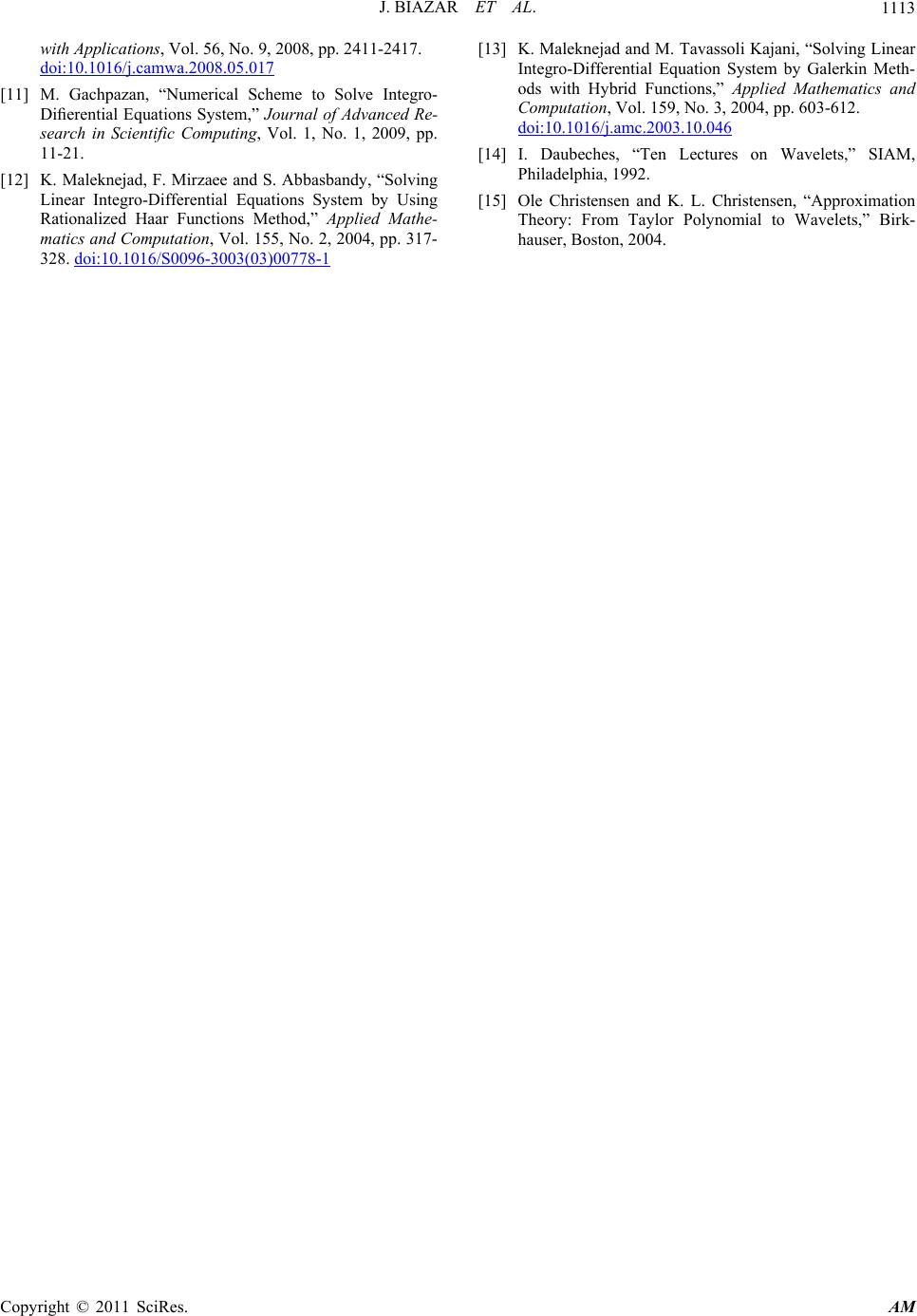 J. BIAZAR ET AL. Copyright © 2011 SciRes. AM 1113 with Applications, Vol. 56, No. 9, 2008, pp. 2411-2417. doi:10.1016/j.camwa.2008.05.017 [11] M. Gachpazan, “Numerical Scheme to Solve Integro- Difierential Equations System,” Journal of Advanced Re- search in Scientific Computing, Vol. 1, No. 1, 2009, pp. 11-21. [12] K. Maleknejad, F. Mirzaee and S. Abbasbandy, “Solving Linear Integro-Differential Equations System by Using Rationalized Haar Functions Method,” Applied Mathe- matics and Computation, Vol. 155, No. 2, 2004, pp. 317- 328. doi:10.1016/S0096-3003(03)00778-1 [13] K. Maleknejad and M. Tavassoli Kajani, “Solving Linear Integro-Differential Equation System by Galerkin Meth- ods with Hybrid Functions,” Applied Mathematics and Computation, Vol. 159, No. 3, 2004, pp. 603-612. doi:10.1016/j.amc.2003.10.046 [14] I. Daubeches, “Ten Lectures on Wavelets,” SIAM, Philadelphia, 1992. [15] Ole Christensen and K. L. Christensen, “Approximation Theory: From Taylor Polynomial to Wavelets,” Birk- hauser, Boston, 2004.
|