 Applied Mathematics, 2011, 2, 1096-1104 doi:10.4236/am.2011.29151 Published Online September 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Expanding the Tanh-Function Method for Solving Nonlinear Equations Nassar Hassan Abdel-All, Mohamed Abd-Allah Abdel-Razek, Abd-Allah Kamel Seddeek Department of Mat hematics, Faculty of Science , Assiut University, Assiut, Egypt E-mail: abdel_razek555@yahoo.com Received March 14, 201 1; revised June 9, 2011; accepted June 16, 2011 Abstract In this paper, using the tanh-function method, we introduce a new approach to solitary wave solutions for solving nonlinear PDEs. The proposed method is based on adding integration constants to the resulting non- linear ODEs from the nonlinear PDEs using the wave transformation. Also, we use a transformation related to those integration constants. Some examples are considered to find their exact solutions such as KdV- Burgers class and Fisher, Boussinesq and Klein-Gordon equations. Moreover, we discuss the geometric in- terpretations of the resulting exact solutions. Keywords: Tanh-Fun cti on M eth od, Nonlinea r Equations, Solitary Waves 1. Introduction The importance of nonlinear partial differential equ ation s (PDEs) appears in describing the nonlinear phenomena in various fields of sciences. Many powerful methods have been developed to find the exact solutions of non- linear PDEs, among them inverse scattering method [1], Hirota bilinear form [2], Painlevé analysis [3], direct algebraic method [4], tanh-function method [5,6] and it’s extensions [7-9] and the sine-cosine method [10,11]. Herman et al. [12] introduced a general physical approach to solitary wave construction from linear solutions and obtained many exact solution of nonlinear PDEs using the direct algebraic method [4]. In this paper, we introduce a similar technique to [12] using the tanh-function method to obtain exact solutions for nonlinear evolution and wave equations. The first step in the tanh-function method is using an independent variable to turn the nonlinear PDEs into other nonlinear ordinary differential equations (ODEs) which may or may not be integrable and neglecting the integration con- stants in case of integrable ODEs. Here, we add integra- tion constants in the resu lting integr able non linear ODEs. Also, we use a new transformation in which we express the solution function as a sum of another independent function and a constant which are determined later. By means of this modification, we get the exact solutions in which a free constant appears which for some values gives the solutions of the tanh-function method. When the resulting nonlinear ODEs is non integrable, we use the transformation only to get the same exact solutions of the tanh-function method. 2. Expanding the Tanh-Function Method for Solving Nonlinear Equations The tanh-function method, pioneered by Malfliet [5,6], is a common powerful method for solving nonlinear equa- tions. Here, we introduce a modification of the tanh- function method through the following: Consider the nonlinear evolution and wave equations in the forms ,,, ,=0,,,, ,=0, txxx ttxxx Puuu uPuu u u (1) respectively. Introducing the wave transformation ,= ,=,uxt Ukxt (2) to change (1) into a nonlinear ODE ,,, ,=0,OUU UU (3) where is the wave number and >0k is the travelling wave velocity. Assuming (3) is integrated with resp ect to as many times as possible without neglecting the integration constants. For the evolution equations the maximum number of integration is 1 and for the wave equations is 2. For reasons that will be explained below, we only leave the integration con s tant of the last integration.  N. H. ABDEL-ALL ET AL.1097 .c To obtain the exact solitary wave solution, possibly having a determined constant term , we introduce the transformation 1 c 1 =U (4) Substituting (4) into (3) and setting the constant part equals to zero in the resulting nonlinear ODE in assuming that the function and its derivatives have the following asymptotic values, as , (5) and for 1n () 0as , n (6) where the superscripts denotes differentiation to the order , with respect to n , also we assume that satisfies the algebraic equation in , then we get the values of . 1 Applying the tanh-function method by introducing the new independent variable c =tanhY which leads to the change of derivatives in the forms 2 2 22 22 dd =1 , dd dd =12 1, d dd YY YY Y YY 2 d , (7) and using the finite ex pansion =0 == mn n n SY aY (8) where is a positive integer determined by the balan- cing procedure in the resulting nonlinear ODE in . Thus, we have an algebraic system of equations from which the constants mS ,,=0, , n kan m are obtained and determine the function , hence we get the exact solutions of (1). Now, we obtain exact solutions for some examples of nonlinear evolution and wave equations using the suggested method. 3. KdV-Burgers Class Consider the KdV-Burgers class in the form =0, txxx xxx uuuu u (9) where , and are real constants. The class (9) gives the Burgers equation and the KdV equation at =0 and =0 respectively. 3.1. Burgers Equation Consider the Burgers equation in the form =0. txxx uuuu (10) Using (2), for , to change (10) into the following nonlinear ODE =1k =0.UUUU (11) Integrating (11) once to get a new nonlinear ODE in the form 21 1=0, 2 UUUcC (12) where is the integration constant. 1 Introducing (4) into (12), we have cC 2 111 11 =0. 22 ccc C (13) Using the condition s (5), (6) and that satisfies the algebraic equation 2 11=0, 2 c (14) then the constant term in (13) equals to zero, 11 1=0. 2 ccC (15) Then we have the following two cases according to the values of . 1 Case (1). c 1 Using (8), in this case we have =0:c 22 1 1 d =0 2d S SS Y Y . (16) Applying the tanh-function method by balancing the nonlinear term with the derivative term 2 Sd d S Y, we get , and using (8) we have =1m 01 ==SYa aY . (17) Substituting (17) in to (16), we obtain 22 0101 1 11=0 2 aaYaaYa Y . (18) Setting zero all the coefficients of , we get the algebraic system of equations =0,1,2 n Yn 2 001 101 2 11 1=0, 2=0, 1=0. 2 aaa aaa aa (19) From which we have 01 22 =,=,=2.aa (20) Using (4), we get the exact solutions of the tanh- Copyright © 2011 SciRes. AM  N. H. ABDEL-ALL ET AL. Copyright © 2011 SciRes. AM 1098 function method in the form [13] values of . 1,2 22 =tanhux 2,t (21) 1 Case (1). c 1 In this case, we get the exact solutions of the tanh- function method in the forms [14] =0:c these solutions represent 2-dimensional surfaces in the Monge form as shown in Figure 1 for ==1 . 2 1 2 2 412 =4 tanh 12 12 =4 tanh ux ux , , t t (27) Case (2). 12 =:cC Using the same way as in Case (1), we obtain the exact solutions in th e form 1,2 22 2 =tanh2 C ux 2.Ct (22) these solutions represent 2-dimensional surfaces in the Monge form as shown in Figure 3 for ==1. Case (2). 12 =:cC These relations represent surfaces whose Gaussian curvature and mean curvature K are given by (23) In this Case, we have the exact solutions in the forms 2 1 2 2 2412 =2 tanh 21212 =2 tanh C ux C ux Thus the solutions (22) represent a family of parabolic surfaces , and a family of planes at =0, 0KH 0=2 4, 4. Ct Ct (28) =KH 2 Ct as shown in Figure 2 for =0C,1,==1 ; when , we get the solutions (21). =0C These relations represent surfaces whose Gaussian curvature and mean curvature K are given by (2 9) 3.2. KdV Equation Thus the solutions (28) represent a family of parabolic surfaces =0, 0KH , and a family of planes 0=KH at 1 4 2 cos h xCt = =1 Consider the KdV equation in the form =2 =0,1,C as shown in Figure 4 for C; when , we get the solutions (27). =0 =0. tx xxx uuuu (24) Using (2), for , to change (24) into a nonlinear ODE, then int egratin g once, we obtain =1k 3.3. KdV-Burgers Equation 21 1=0, 2 UUUcC (25) Consider the KdV-Burgers equation in the form: where is the integration constant. 1 Introducing (4) into (25), we get cC =0. txxx xxx uuuu u (30) 2 111 11 =0. 22 cccC (26) Using (2) to change (30) into a nonlinear ODE, then integrating once 22 1 1=0, 2 ''' UUkUkUcC (31) Using the conditions (5), (6) and (14), we get (15), hence we obtain the fo llowing two cases according to the 1,2 22 22 1,2 3 2222 42 1,2 1,2 =0, 214 84sech22tanh22 =, 414 84sech22 ==0 at =22. K CCxCtxC t H CCxC t KHxC t (23) 1,2 22 24 1,2 3 222 242 1 1,2 1,2 =0, 12141616sech2 42cosh2 4 = , 576141616sech2 4tanh2 4 ==0 at =242. cosh K CCxC txC t H CCxC txC t KH xCt (29) 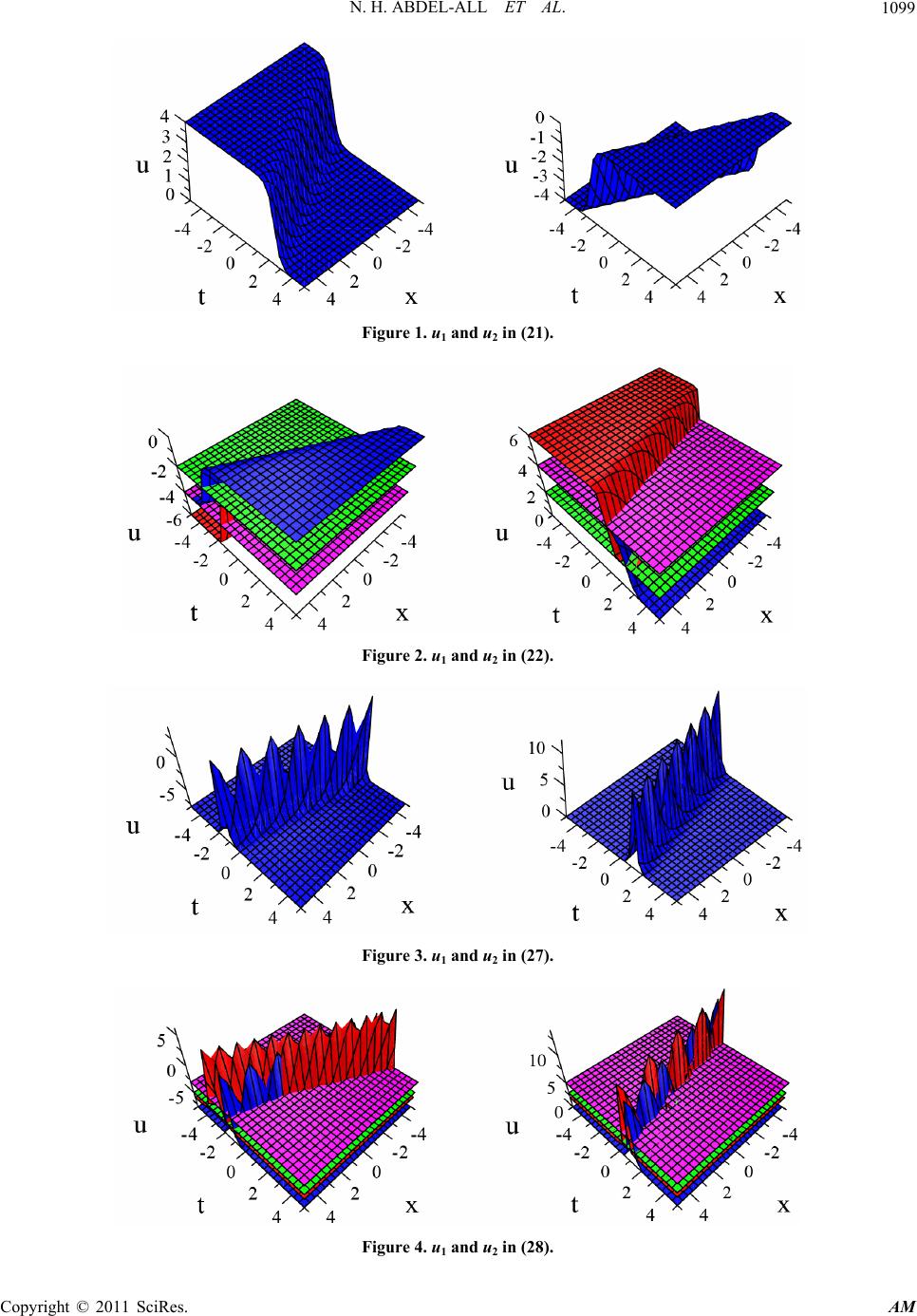 N. H. ABDEL-ALL ET AL.1099 Figure 1. u1 and u2 in (21). Figure 2. u1 and u2 in (22). Figure 3. u1 and u2 in (27). Figure 4. u1 and u2 in (28). Copyright © 2011 SciRes. AM 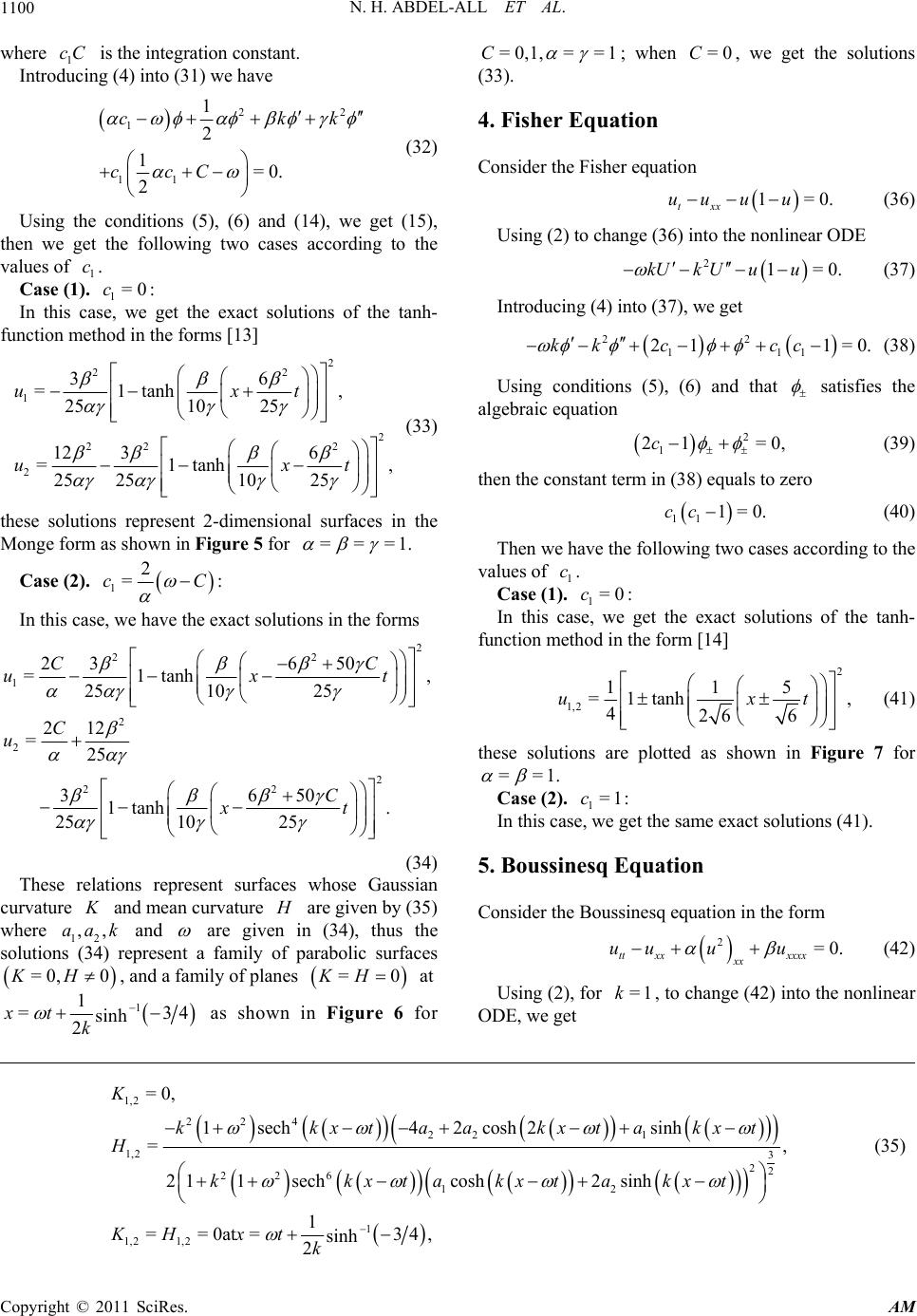 N. H. ABDEL-ALL ET AL. Copyright © 2011 SciRes. AM 1100 where is the integration constant. 1 Introducing (4) into (31) we have cC =0,1, = =1C ; when , we get the solutions 3). =0C 22 1 11 1 2 1=0. 2 ck ccC k (3 4. Fisher Equation (32) Consider the Fisher equation 1= txx uu uu 0 0. . (36) Using the conditions (5), (6) and (14), we get (15), then we get the following two cases according to the values of . Using (2) to change (36) into the nonlinear ODE 21=kUkUuu (37) 1 Case (1). c 1 In this case, we get the exact solutions of the tanh- function method in the forms [13] =0:cIntroducing (4) into (37), we get 2 22 1 2 22 2 2 36 =1tanh , 2510 25 12 36 =1tanh 25 251025 uxt ux 22 111 21 1=0kk ccc . (38) ,t . (33) Using conditions (5), (6) and that satisfies the algebraic equation 2 1 21 =0c , (39) then the constant term in (38) equals to zero 111=0.cc (40) these solutions represent 2-dimensional surfaces in the Monge form as shown in Figure 5 for ===1 Then we have the following two cases according to the values of . Case (2). 12 =:cC 1 Case (1). c In this case, we have the exact solutions in the forms 2 22 1 2 2 2 22 23 650 =1tanh 2510 25 212 =25 3650 1tanh . 2510 25 CC ux C u C xt 1 In this case, we get the exact solutions of the tanh- function method in the form [14] =0:c ,t 2 1,2 115 =1tanh 426 6 ux,t (41) these solutions are plotted as shown in Figure 7 for ==1. Case (2). 1 In this case, we get the same exact solutions (41). =1:c 5. Boussinesq Equation (34) These relations represent surfaces whose Gaussian curvature and mean curvature K are given by (35) Consider the Boussinesq equation in the form where 12 and ,,aak are given in (34), thus the solutions (34) represent a family of parabolic surfaces , and a family of planes , 0KH 2=0. tt xxxxxx xx uu uu (42) =0 =0KH at Using (2), for , to change (42) into the nonlinear ODE, we get =1k 1 =3 4 sinh 2 xtk 1 as shown in Figure 6 for 1,2 22422 1 1,2 3 22 22612 1 1,2 1,2 =0, 1sech42cosh2 sinh = , 2 11sechcosh2sinh 1 ==0at= 34, sinh 2 K kkx taakxtakx t H kkxtakxt akxt KH xt k (35) 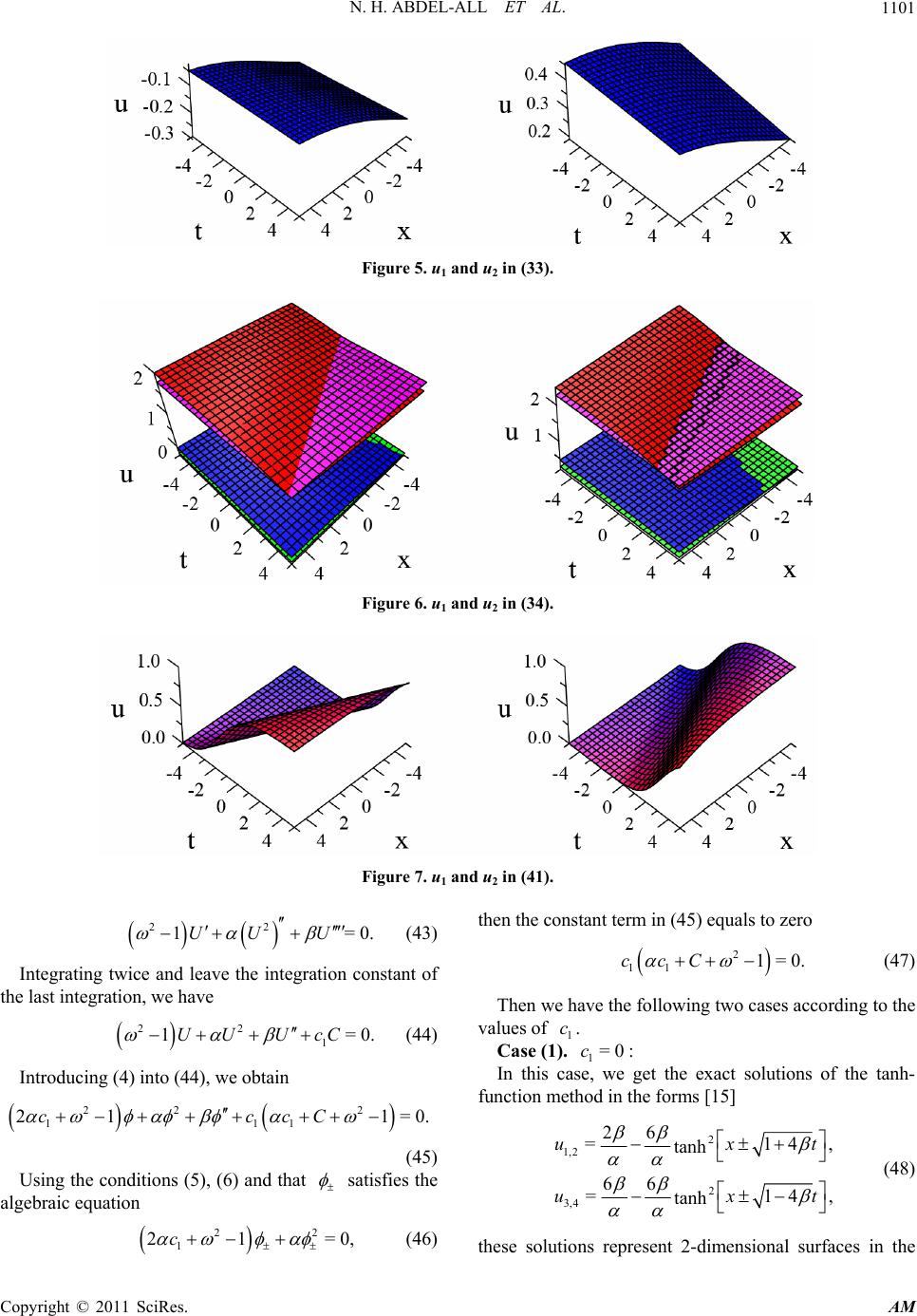 N. H. ABDEL-ALL ET AL.1101 Figure 5. u1 and u2 in (33). Figure 6. u1 and u2 in (34). Figure 7. u1 and u2 in (41). 22 1=UU U 0. =0. =0. (43) Integrating twice and leave the integration constant of the last integration, we have 22 1 1UU UcC (44) Introducing (4) into (44), we obtain 22 2 111 21 1cccC (45) Using the condition s (5), (6) and that satisfies the algebraic equation 22 1 21c then the constant term in (45) equals to zero 2 11 1=0.ccC (47) Then we have the following two cases according to the values of . 1 Case (1). : c 1 In this case, we get the exact solutions of the tanh- function method in the forms [15] =0c 2 1,2 2 3,4 26 =1 tanh 66 =1 tanh ux ux 4, 4, t t (48) =0, (46) these solutions represent 2-dimensional surfaces in the Copyright © 2011 SciRes. AM  N. H. ABDEL-ALL ET AL. 1102 Monge form as shown in Figure 8 for =1,= 1. Case (2). 2 11 =1cC : In this case, we get the exact solutions in the forms 2 1,2 2 3,4 26 =1 tanh 66 =1 tanh C ux C ux 42, 42. Ct Ct (49) These relations represent surfaces whose Gaussian curvature K and mean curvature H are given by (50)(51). then the solutions (49) represent a family of parabolic surfaces , and a family of planes at =0,0KH ==0KH 1 1 =142 2 cosh 2 xCt , 1 1 =142 2 cosh 2 xCt as shown in Fi g u re 9 for and = 0,1C=1,= 1 ; and when , we get the solutions (48). =0C 6. Klein-Gordon Equation Consider the Klein-Gordon equation in the form 3=0. tt xx uu uu (52) Using(2) to change (52) into the nonlinear ODE 22 3 =0.kUUU (53) Introducing (4) into (53) 22 2 1 32 11 33 =0. kc cc 2 1 c (54) Using the conditions (5), (6) and that satisfies the algebraic equation 223 11 33cc =0, (55) then the constant term in (54) equals to zero 2 11 =0.cc (56) Then we have the following two cases according to the values of . 1 Case (1). : c 1 In this case, we obtain the solutions of the tanh- function method in the form [7] =0c 1,2 2 2 =tanh 2( ) >0. 2 ux , t (57) these solutions are plotted as shown in Figure 10 for == =1 and =2. Case (2). 1=:c In this case, we get the same exact solutions (57). 7. Conclusions In this paper, we introduced a new technique, by adding an integration constant and a new transformation (4) then using the tanh-function method, to obtain exact solitary wave solutions in case of the nonlinear evolution and wave equations that turn into nonlinear integrable ODEs using the wave transformation (2). By this technique, we obtained exact solutions of the Burgers equation in (22), the KdV equation in (28), the 1,2 2 4 1,2 3 2 22 42 1 1,2 1,2 =0, 12212cosh21 42sech2142 = , 115212sech21422142 tanh 1 ==0 at =1422, cosh 2 K CxCtx H CxCt xCt KH xCt Ct (50) 3, 4 2 4 3,4 3 2 22 42 1 3,4 3,4 =0, 12212cosh21 42sech2142 = , 11521 2sech21 4221 42 tanh 1 ==0 at =1422, cosh 2 K CxCtx H Cx Ctx Ct KH xCt Ct (51) Copyright © 2011 SciRes. AM 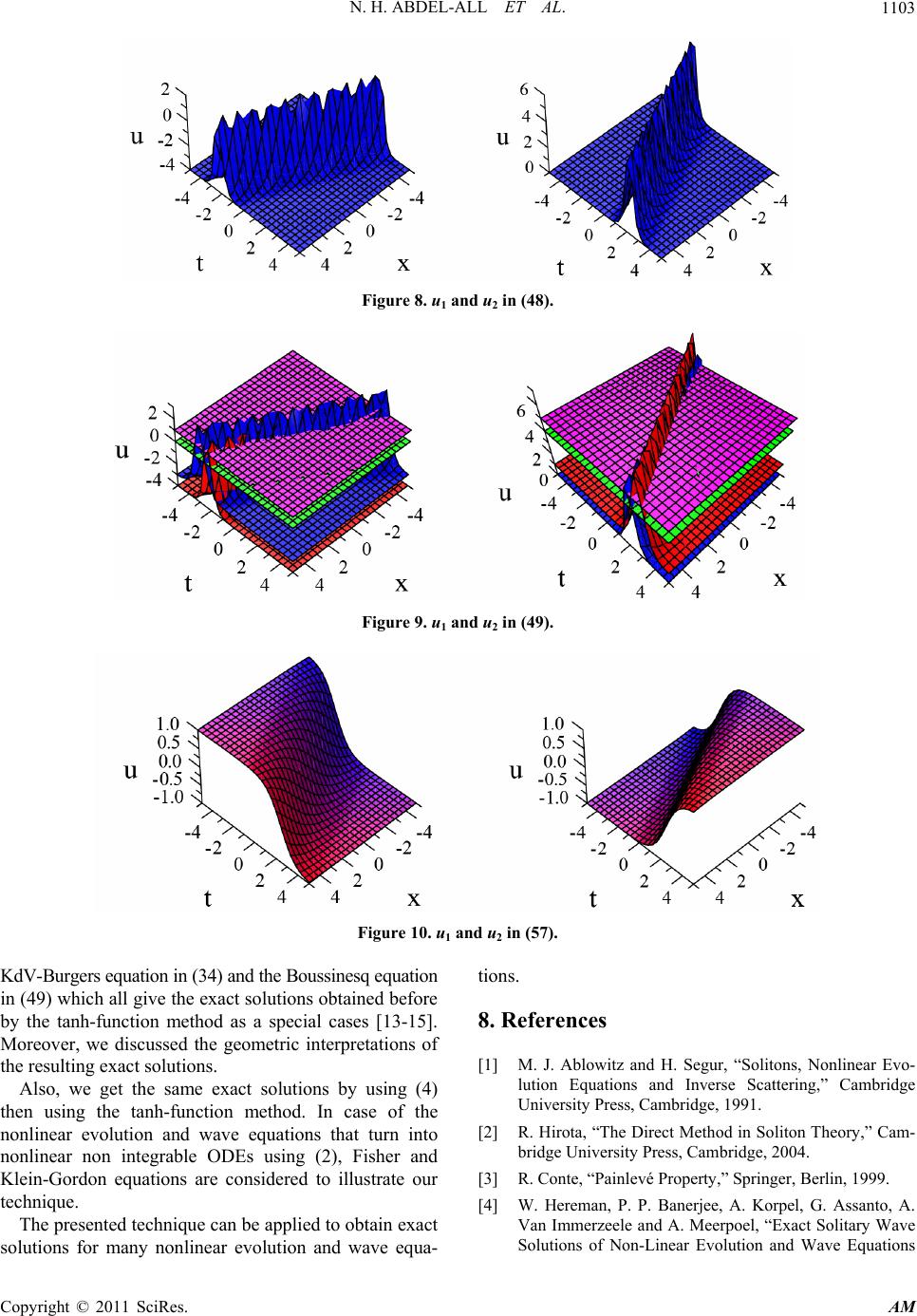 N. H. ABDEL-ALL ET AL.1103 Figure 8. u1 and u2 in (48). Figure 9. u1 and u2 in (49). Figure 10. u1 and u2 in (57). KdV-Burgers equation in (34) and the Boussinesq equation in (49) which all give the exact solutions obtained before by the tanh-function method as a special cases [13-15]. Moreover, we discussed the geometric interpretations of the resulting exact solutions. Also, we get the same exact solutions by using (4) then using the tanh-function method. In case of the nonlinear evolution and wave equations that turn into nonlinear non integrable ODEs using (2), Fisher and Klein-Gordon equations are considered to illustrate our technique. The presented technique can be applied to obtain exact solutions for many nonlinear evolution and wave equa- tions. 8. References [1] M. J. Ablowitz and H. Segur, “Solitons, Nonlinear Evo- lution Equations and Inverse Scattering,” Cambridge University Press, Cambridge, 1991. [2] R. Hirota, “The Direct Method in Soliton Theory,” Cam- bridge University Press, Cambridge, 2004. [3] R. Conte, “Painlevé Property,” Springer, Berlin, 1999. [4] W. Hereman, P. P. Banerjee, A. Korpel, G. Assanto, A. Van Immerzeele and A. Meerpoel, “Exact Solitary Wave Solutions of Non-Linear Evolution and Wave Equations Copyright © 2011 SciRes. AM  N. H. ABDEL-ALL ET AL. 1104 Using a Direct Algebraic Method,” Journal of Physics A: Mathematical and General, Vol. 19, No. 5, 1986, pp. 607-628. doi:10.1088/0305-4470/19/5/016 [5] W. Malfliet, “Solitary Wave Solutions of Nonlinear Wave Equations,” American Journal of Physics, Vol. 60, No. 7, 1992, pp. 650-654. doi:10.1119/1.17120 [6] W. Malfliet and W. Hereman, “The Tanh Method: I Ex- act Solutions of Nonlinear Evolution and Wave Equa- tions,” Physica Scripta, Vol. 54, No. 6, 1996, pp. 563-568. doi:10.1088/0031-8949/54/6/003 [7] S. A. El-Wakil, S. K. El-labany, M. A. Zahran and R. Sabry, “Modified Extended Tanh Function Method for Solving Nonlinear Partial Differential Equations,” Phys- ics Letters A, Vol. 299, No. 2-3, 2002, pp. 179-188. doi:10.1016/S0375-9601(02)00669-2 [8] E. Fan, “Extended Tanh-Function Method and Its Appli- cations to Nonlinear Equations,” Physics Letters A, Vol. 277, No. 4-5, 2000, pp. 212-218. doi:10.1080/08035250152509726 [9] Y.-T. Gao and B. Tian, “Generalized Tanh Method with Symbolic Computation and Generalized Shallow Water Wave Equation,” Computers & Mathematics with Appli- cations, Vol. 33, No. 4, 1997, pp. 115-118. doi:10.1016/S0898-1221(97)00011-4 [10] C. Yan, “A Simple Transformation for Nonlinear Waves,” Physics Letters A, Vol. 224, No. 1-2, 1996, pp. 77-84. doi:10.1016/S0375-9601(96)00770-0 [11] Z.-Y., Yan and H.-Q. Zhang, “Auto-Darboux Transfor- mation and Exact Solutions of the Brusselator Reaction Diffusion Model,” Applied Mathematics and Mechanics, Vol. 22, No. 5, 2000, pp. 541-546. doi:10.1023/A:1016359331072 [12] W. Hereman, A. Korpel and P. P. Banerjee, “A General Physical Approach to Solitary Wave Construction from Linear Solutions,” Wave Motion, Vol. 7, No. 3, 1985, pp. 283-289. doi:10.1016/0165-2125(85)90014-9 [13] A. A. Soliman, “The Modified Extended Tanh-Function Method for Solving Burgers-Type Equations,” Physica A: Statistical Mechanics and Its Applications, Vol. 361, No. 2, 2006, pp. 394-404. doi:10.1016/j.physa.2005.07.008 [14] A.-M. Wazwaz, “The Extended Tanh Method for Abun- dant Solitary Wave Solutions of Nonlinear Wave Equa- tions,” Applied Mathematics and Computation, Vol. 187, No. 2, 2007, pp. 1131-1142. doi:10.1016/j.amc.2006.09.013 [15] A.-M. Wazwaz, “New Travelling Wave Solutions to the Boussinesq and the Klein-Gordon Equations,” Commu- nications in Nonlinear Science and Numerical Simulation, Vol. 13, No. 5, 2008, pp. 889-901. doi:10.1016/j.cnsns.2006.08.005 Copyright © 2011 SciRes. AM
|