Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 1076-1090 doi:10.4236/am.2011.29149 Published Online September 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Numerical Solution of Mean-Square Approximation Problem of Real Nonnegative Function by the Modulus of Double Fourier Integral Petro Savenko, Myroslava Tkach Pidstryhach Institute for Applied Problems of Mechanics and Mathematics, Lviv, Ukraine E-mail: spo@iapmm.lviv.ua, tmd@iapmm.lviv.ua Received May 27, 2011; revised June 21, 2011; accepted June 29, 2011 Abstract A nonlinear problem of mean-square approximation of a real nonnegative continuous function with respect to two variables by the modulus of double Fourier integral dependent on two real parameters with use of the smoothing functional is studied. Finding the optimal solutions of this problem is reduced to solution of the Hammerstein type two-dimensional nonlinear integral equation. The numerical algorithms to find the branching lines and branching-off solutions of this equation are constructed and justified. Numerical examples are pre- sented. Keywords: Mean-Square Approximation, Discrete Fourier Transform, Two-Dimensional Nonlinear Integral Equation, Nonuniqueness and Branching of Solutions, Two-Dimensional Nonlinear Spectral Problem 1. Introduction A variational problem about mean-square approximation of a real finite function by the modulus of double Fourier integral with use of smoothing functional [1] is studied. The nonuniqueness and branching of solutions is an es- sential feature of nonlinear approximation problem. The problem of finding a set of branching points is insuffi- ciently investigated nonlinear two-parameter spectral problem. The existence of connected components of the spectrum, which in the case of real parameters, similarly as in [2], are spectral lines, is essential difference of two-dimensional spectral problems compared with one- dimensional ones. The algorithms for finding the lines of possible bran- ching of solutions of the Hammerstein type nonlinear equation, which are based on implicit functions methods, are proposed and justified. The algorithms for numerical finding the optimal solutions of the approximation prob- lem are constructed and justified also. Numerical exam- ples are presented. Note that this class of problems are widely used at solving the inverse problems of radio physics, acoustics and so on [3,4]. 2. Problem Formulation, Basic Equations and Relations Consider the linear integral operator 12 112 2 , ,exp dd G fss AU Uxyicxs cysxy , (1) which is the double Fourier transform of function 2 ,UxyL G, dependent on the real two-dimen- sional parameter 12 ,ccc, 0i c 1, 2i1. Operator acts from space into the solid angle U 2 LG 2 L , where 2 is some limited domain in which a real continuous nonnegative and nonzero function 12 , F ss is given. In the spaces 2 LG and 2 L we introduce scalar products and generable by them norms 2 2 2 2 121 2 12 12 4π ,, ,, LG G LG LG UUUxyUxy xy cc UUU ,dd (2) 1Parameters c1, c2 are physical parameters of the object being investi- gated. In particular, in the antennas synthesis problems these parame- ters characterize the electrical sizes of aperture of radiating system and a solid angle in which the necessary energetic characteristic of radiation is given [4].  P. SAVENKO ET AL.1077 2 1211221212 ,,, Ldd f ffssfss ss, 2 12 ,L fff . (3) Since the domain is limited, the integral in (1) exists in the usual sense [5] for an arbitrary function . Here the function 2 G 2 ULG 12 , f ss is continuous and quadratically integrable. Consider the problem about approximation of a real continuous and nonnegative function 12 , F ss in the domain by the modulus of the Fourier integral (1). We shall formulate it as a minimization problem of the smoothing functional 2 2 2 2 2 22 () 22 min . L G L UL G LG L UFAU U Ff U (4) Here the first summand describes the mean-square de- viation of the modulus of the Fourier integral from the given function 12 , F ss in the domain . The second summand imposes constraints on the norm of the Fourier integral prototype, is a weight (regularizing) pa- rameter. Equating the Hato differential of the functional (4) to zero and taking into account (1), we write the equation concerning the function U that describes the fixed points in the space : U 2 LG argiAU UAAUAFe , (5) where 1122 12 12 12 2,e dd 2π icxs cys cc A ffss ss is conjugate operator with A . Further we introduce to shorten records the following notations: 12 ,Qss, , , . 12 dddQss ,PxydddPxy Taking into account that a set of zeros NA con- sists only of zero element, and acting on both parts of (5) by operator A , we obtain equivalent to (5) equation with respect to function 12 , f ss in the space G 2 L if arg fAAfAAFe . (6) Accordingly to the introduced above notations this equation in the expanded form takes the form arg () ,, ()d ,,e d, ifQ f Qf KQQfQQ KQQ FQQ Bc c (7) where 12 111222 2 ,, expd d (2π) G KQQ cc icxs scyssxy c (8) is a kernel dependent on the form of the domain . In the case of symmetric domain (8) can be simplified. In particular, if the axis is the axis of symmetry of the domain and its upper and lower limits are de- scribed, respectively, by the functions G G OX G y x at 1,1x , the kernel (8) is real and it has the form 1222 1 111 2 22 1 ,, sin cosd . 2π KQQ cs sx ccx ssx ss c (9) Lemma 1. Between solutions of Equations (5) and (6) there exists bijection, that is if is the solution of (5) U then f AU is the solution of (6). On the contrary, if f is the solution of (6) then 11 exp aUAf Ff rgi is the solution of (5). Proof. Let U be a solution of (5). Then arg 0 iAU UAA AFe 11 U . Acting on this equality by the operator A , we obtain arg 11 iAU AUAAAA Fe 0AU . The ope- rator acts from the space 2 LG into the space 2 L , and a set of its zeros consists only of zero element. Then from the last identity follows that 2AU f L is a solution of the equation arg 11 0 if fAAfAAFe , that is (6). On the contrary, let 2 fL be a solution of (6). The operator A acts from the space into the space 2 L 2 LG [6], and the Hilbertian space 2 L coin- cides with the space [5]. From here follows, that 2 L A acts from the space into the space 2 L G 2 L. Taking into account that F and f are continuous functions, the function exp arg F i f is quadrati- cally integrable in the domain . From here follows 11 2 exp argfFifL . Thus, 11 2 exp arg A fFifUL G and the right part of (6) is a result of action of operator A on the element U , that is 11 exp arg A UAAfF i ff . Thus owing to the fact that A Uf , we write this equality in the form 11 exp arg0AUAAUAFiAU . Since a set of zeros of operator A consists only of Copyright © 2011 SciRes. AM 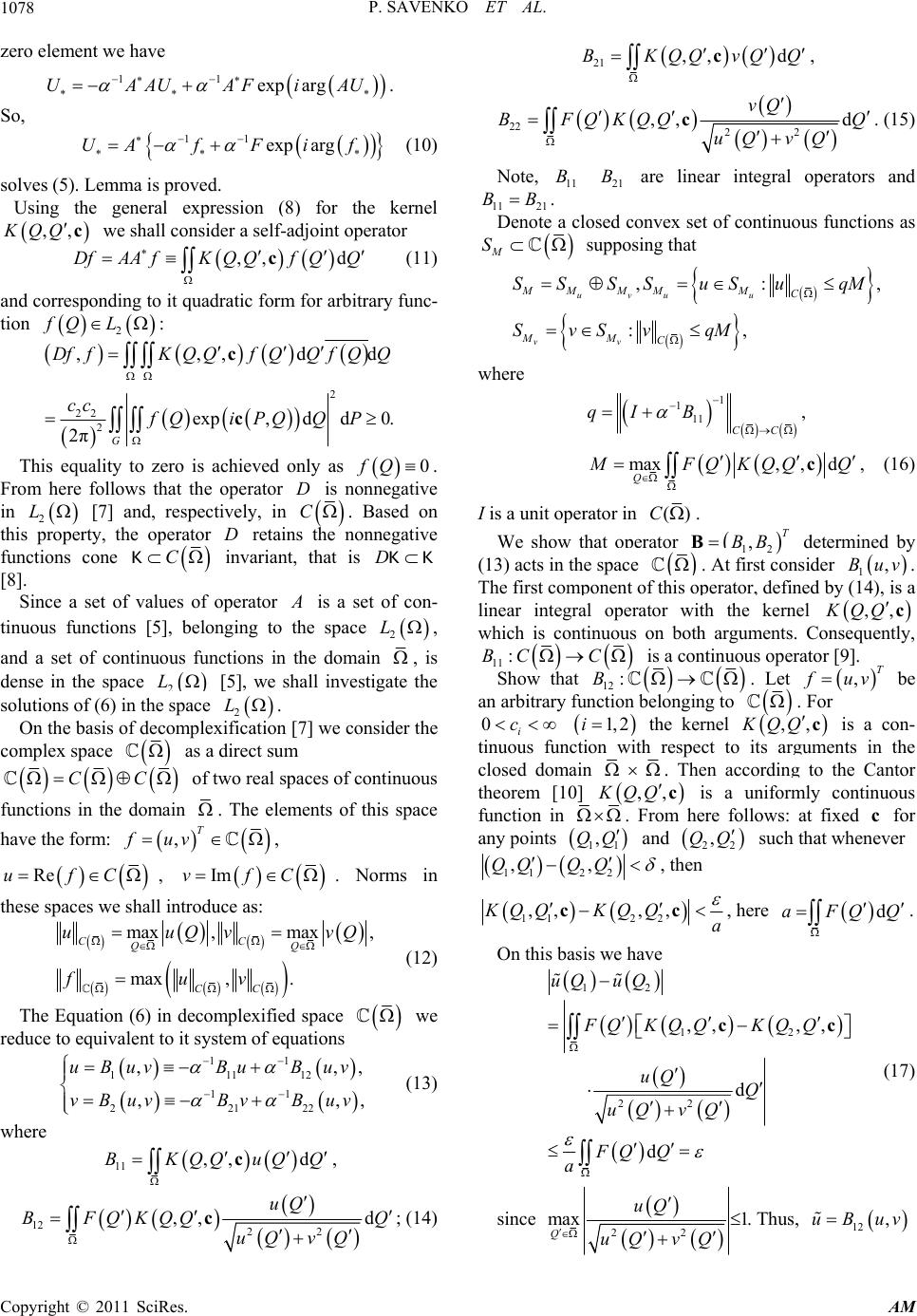 P. SAVENKO ET AL. 1078 zero element we have 11 exp argUAAUAFiAU . So, (10) 11 exp argUAfF i f solves (5). Lemma is proved. Using the general expression (8) for the kernel ,,cKQQ ,, dcDfAAfKQ QfQQ we shall consider a self-adjoint operator (11) and corresponding to it quadratic form for arbitrary func- tion : 2 fQ L 2 22 2 ,,,d exp,d d0. 2π G DffKQQf QQf QQ cc fQiPQQP c c d This equality to zero is achieved only as 0fQ . From here follows that the operator is nonnegative in [7] and, respectively, in D 2 L C. Based on this property, the operator retains the nonnegative functions cone D CK invariant, that is [8]. DKK Since a set of values of operator A is a set of con- tinuous functions [5], belonging to the space 2 L , and a set of continuous functions in the domain , is dense in the space 2 [5], we shall investigate the L solutions of (6) in the space . L 2 On the basis of decomplexification [7] we consider the complex space as a direct sum CC of two real spaces of continuous functions in the domain . The elements of this space have the form: , T fuv, ReufC, ImvfC. Norms in these spaces we shall introduce as: max,max , max, . CC QQ CC uuQvv fuv Q (12) The Equation (6) in decomplexified space we reduce to equivalent to it system of equations 11 11112 11 22122 ,,, ,,, uBuvBu Buv vBuvBvBuv (13) where 11 ,, dcBKQQuQ Q , 12 22 ,, dcuQ BFQKQQ uQ vQ 21 ,, dcBKQQvQ Q , 22 22 ,, dcvQ BFQKQQ uQ vQ Q . (15) Note, are linear integral operators and 11 B21 B 11 21 BB . Denote a closed convex set of continuous functions as M S supposing that ,: :, uvu u vv MM MMMC MM C SSSSuS uqM SvSvqM , where 1 1 11 , CC qI B max, ,dc Q M FQ KQQQ , (16) I is a unit operator in ()C . We show that operator 12 determined by ,BT BB (13) acts in the space Q ; (14) . At first consider ,Buv 1. The first component of this operator, defined by (14), is a linear integral operator with the kernel ,,cKQQ which is continuous on both arguments. Consequently, 11 :BCC is a continuous operator [9]. Show that 12 :B . Let ,T f uv be an arbitrary function belonging to . For 0i c 1, 2i the kernel is a con- ,,cKQQ tinuous function with respect to its arguments in the closed domain . Then according to the Cantor theorem [10] ,,cKQQ is a uniformly continuous function in . From here follows: at fixed for any points c 11 ,QQ and 22 ,QQ such that whenever 112 2 ,,Q QQQ , then 112 2 ,,, ,ccKQQKQ Qa , here daFQQ . On this basis we have 12 12 22 ,, ,, d d uQ uQ FQKQQKQ Q uQ Q uQ vQ FQ Q a cc (17) since 22 max 1 Q uQ uQ vQ . Thus, 12 , uBuv Copyright © 2011 SciRes. AM 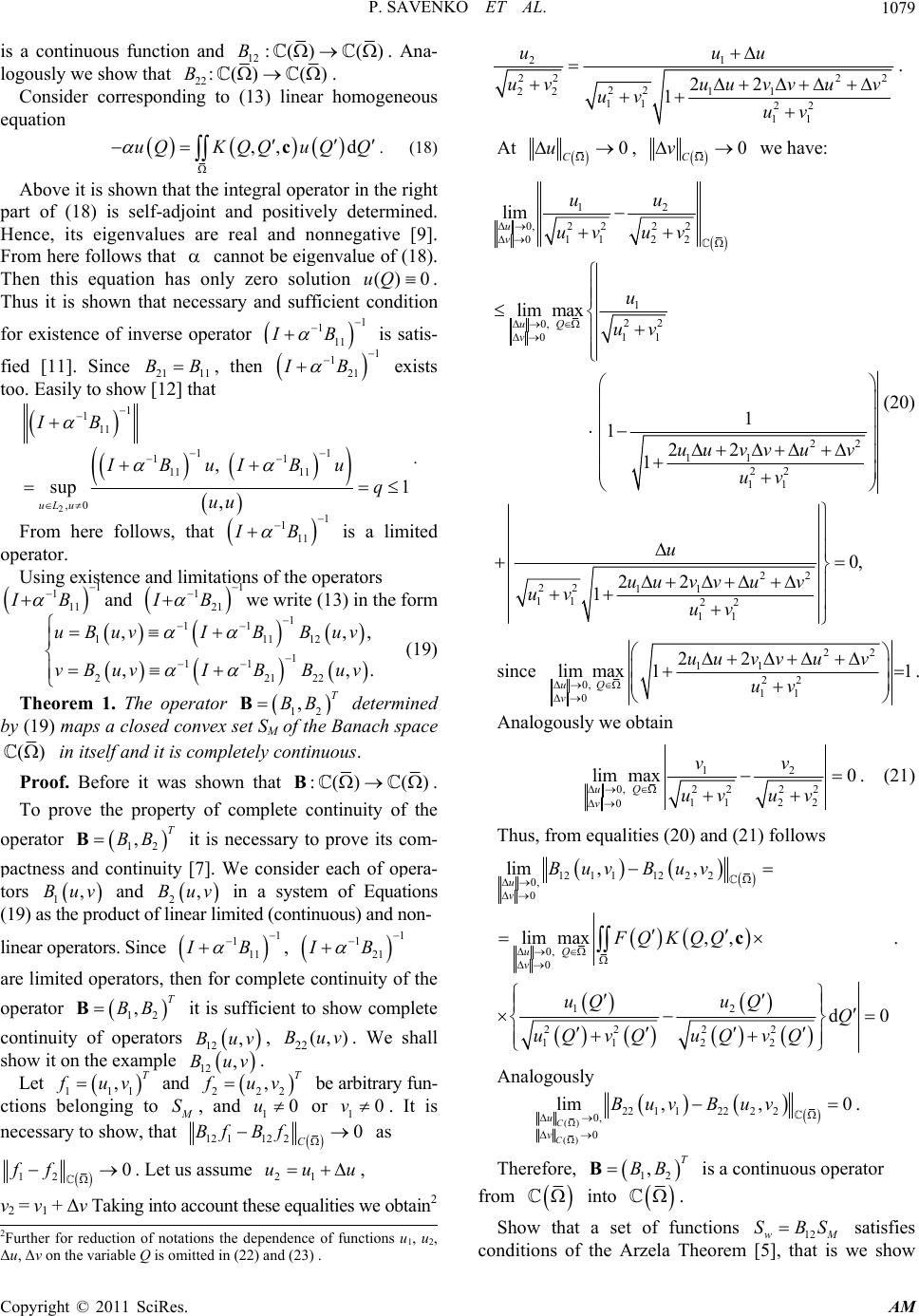 P. SAVENKO ET AL.1079 is a continuous function and 12 :()()B . Ana- logously we show that 22 :()()B . Consider corresponding to (13) linear homogeneous equation ,, dcuQKQQuQ Q . (18) Above it is shown that the integral operator in the right part of (18) is self-adjoint and positively determined. Hence, its eigenvalues are real and nonnegative [9]. From here follows that cannot be eigenvalue of (18). Then this equation has only zero solution uQ()0 . Thus it is shown that necessary and sufficient condition for existence of inverse operator is satis- 1 1 11 IB fied [11]. Since 2111 , then BB 1 1 21 IB exists too. Easily to show [12] that 2 1 1 11 11 11 11 11 ,0 , sup 1 , uLu IB IBuIBu q uu . From here follows, that is a limited operator. 1 1 11 IB Using existence and limitations of the operators and 1 1 IB 11 1 1 21 IB 11 v I w 12 22 , . (19) e write (13) in the form 1 111 1 11 221 ,, ,, uBuB Buv vBuvIB Buv Theorem 1. The operator determined 12 ,BT BB by (19) maps a closed convex sanach space et SM of the B () in itself and it is completely continuous. Proof. Before it was shown that :()B(). To prove the property of completee continuity of th operator 12 ,BT BB it is necessary to prove its com- pactness y [7]. We consider each of opera-and continuit tors 1,Buv and 2,Buv in a system of Equations (19) aduct ofmited (continuous) and non- s the pro linear li linear operators. Since 1 1 IB , 1 1 IB 11 21 are limited operators, then for complete continuity of the operator 12 ,BT BB it is sufficient to show complete continuitys of operator 12 ,Buv , 22 (,)Buv. We shall show it on the example 12 ,v . Bu Let 111 ,T f uv and, T 222 f uv be arbitrary fun- ctions belonging to M S, and or 10v. It is 10u necessary to show, that 12 1C Bf Bf 12 20 s a 12 0ff. Let us assume v2 = v1 + Δv Takinain2 21 uu u, g into account these equalities we obt 21 uu u 22 2 2 22 221 1 11 22 11 22 1 uvuuvv uv uv uv At . 0 C u , 0 C v we have: 12 22 22 0, 1122 0 1 22 0, 11 0 22 11 22 11 22 22 11 11 22 11 lim lim max 1 1 22 1 0, 22 1 u v uQ v uu uvuv u uv uu vvuv uv u uu vvuv uv uv (20) since 22 11 22 0, 11 0 22 lim max11 uQ v uu vvuv uv . Analogously we obtain 12 22 22 0, 11 22 0 lim max0 uQ v vv uv uv . (21) Thus, from equalities (20) and (21) follows 121 11222 0, 0 0, 0 12 22 22 11 22 lim max,, d0 u v uQ v FQ KQQ uQu QQ uQ vQuQ vQ lim ,,Buv Buv c . Analogously () () 221 12222 0, 0 lim ,,0 C C u v BuvBuv . Therefore, is a continuous operator fro 12 ,BT BB m into . Sho a setunw that of fctions satisfies 12wM SBS 2Further for reduction of notations the dependence of functions u1, u2, Δu, Δv on the variable Q is omitted in (22) and (23) . co[5], that is nditions of the Arzela Theorem we show Copyright © 2011 SciRes. AM  P. SAVENKO ET AL. 1080 that functions of a set w S are uniformly bounded and equapotentially continuoLet 12 ,wB uv, where us. ,T f uv is an arbitrary function of a set M S. Then for 12 ,QQ ,QQ analogously w(17) with e have 12 dwQwQFQQ a . Thus the functions of a set are equapoten- 12wM SBS tially continuous. Uniform boundedness of a set follows fr 12wM SBS om inequality 22 22 max,,d () max,,d, Q Q uQ FQ KQQ Q uQ vQ uQ w F QKQQQM uQ vQ c c (22) where (,) T f uv is an arbitrary function of a set SM. Thusr 1 B is completely continuous in the the operato first equation of system (19). Complete continuity of operator 2 B is proved analogously. Let ,) T ( f uv be an arbitrary function of a set S an M d ( ,) T ,) ( T g huBv. Show that the function (,) T g h belongs to a set M S. Using the inequalities A xAx a nd 1 11IB q 11 we have 1 1 1 11 () (,) . CCC C CC gQB uv I Bw qM Analogously we obtain: 2 1 1 21 (,)hQB uv . CC C C CC I BqM From these inequalities follows that B M M SS tely contin . So, the operator 12 ,BT BB is compleuous mapping the cloet sed convex s() M S into itself. The theorem is proved. As a corollary of Theorem 1 satisfaction of the Schauder principle conditions [7] in accordance to which the operator 12 ,BT BB has a fixed point ,T f uv to a set , belonging M S, foll (13) and, respectively). Substituting ,T ows. This point solves , (6 f uv into (10), we obtain the solution of (5), tionary point of functional (4). Concerning the synthesis problems of lin which is a sta ear radiator for the case of one-dimensional domains the solu- tions of system of equations similar to (13)re investi- gated, in particular, in [13]. The obtained there results show that nonuniquness and branching of solutions, de- pendent on the size of physical parameters of the prob- lem are characteristic for special case of equations of type (13) (when variables are separated). The results [13] can not be transferred directly to two-dimensional nonlinear integral equations of type (7). Here unlike the branching points [13] there exist branching lines of solu- tions, and the problem of finding the branching lines is not enough investigated nonlinear two-parameter spectral problem. a . Equations of a Set of Branching Points the case when the kernel of (7) determined by (8) is 3 In real, (7) in a space of real continuous functions C has the form ,, d ,,sign d. KQQfQ QfQ F QKQQfQ Q c c (23) Assuming in (23) sign 1fQ tegral linear we obtain the sec- ond kind Fredholm inequation with sym- metric and even kernel 1,, dc f QKQQ fQQQ F. (24) Here the right part 1 Q F,,dcFQKQQQ is a nonnegative function. It was shown that correspond- ing to (24) homogeneous Equation (18) has only zero solution. From here follows that (24) has unique solution 0() f Q, belonging to the space ()C and 0( )1Qsign f , that is solution 0() f Q is nonnegative. Further welution l shall call the so0(,)fQc as initia so tion lution of (7). Corresponding to it solu 00 ,,,ccuQ fQ 0,0cvQ we shall call as initial solution of a system of Equa- tions (13). To find the branching lines and complex solutions of (7), which branch-off from the real solution 0,cfQ we consider the problem on finding such a sees t of valu of parameters 000 12 ,ccc and all distinct from ,cfQ solutioh satisfy the conditions ns of (13), whic 0 0 max ,,0,ccuQfQ max ,0, c Q QvQ (25) Copyright © 2011 SciRes. AM  P. SAVENKO ET AL.1081 as 00cc. Conditions (25) mean that it is necessary to find small continuous solutions in 0 ,, ,cc cwQuQf Q , 0 ,,ccQvQ , converging uniformly to zero as c is necessary also to take into accou 0 c nt th . In addition, it e direction of convergence of vector to Put c 0 c. 00 112 2 , ccc c (26) and we shall find the deired sotioslun in the form 0 0 ,, , , ,, ,. (27) vQ Qc uQf QwQcc Further we omit the dependence of functions ,,wQ and ,,Q on parameters and for reduction of notations. Present some properties of integrands in (13). They are co and (27) it i- r series with respect to the fu ntinuous functions of arguments. We substitute (26) n (13). Then inegrands expand in the un formly convergence powe nctional arguments w, and numerical parameters , in the neighborhood of point 00 0 ,,,0ccfQ : 22 0 0 ,, uQ KQ QuQ Q c ,, , mnpq mnpq mn pq F Q vQ AQQwQ Q c u 22 0 1 ,, ,, . mnp mnpq mn pq vQ KQQvQ FQ uQ vQ BQQwQ Qq c c (28) Here , are c ficientsi on argu- ments. Su , we obtain a 0 ,,c mnpq AQQ of expansion cont bstituting (28) in 0 as a solu f nonlinear equation 0 ,,c mnpq BQQ nuously dependent (13) and considering tion of this system s with respect to oef- 0 stem osmall solu- tions w and ,cfQ sy : 0 0 0 0 2 1,,d , ,, d, pqm n mnpq mn pq Q QFQKQQQ fQ BQQwQ QQ c c c (30) where 00 10 0010 00 01 0001 ,,, ,,, aQA QQQ aQAQQQ cc cc d, d. Extracting in a system of Equations (29), (30) the lin- ear members for and w , to find a set of branc f the so hing 0 00 ,, d , 10 01 0 2 , 2π ,, d, pqm n mnpq mn pq wQ a aQ K QQwQQ cQ A QQw QQQ c c (29) c c points olution 0c al equtions ,fQ a we have an integ f linear inr rated system oteg 1,, dcwQK QQwQQ , (31) 1 0 0 ,,,d. , Q Q F QfQ KQQQ fQ cc c (32) We shall call a set of values of parameter 000 12 ,ccc neous Equations tions as a set of solution , at which the system of linear (31), (32) has distinct from zero points of possible branching of initial homoge- solu- 0,cfQ . Note that the system (31), (32) is ely the functions and noncoherent relativ w . Prev hown that equatiof ty31) has i- ously it has been son pe ( only a zero solution. Therefore the premndiobl of fing a set of branching points under condition 0 fQ,c 0, is reduced to equation 1 0 0 ,,, d, , QT Q F QfQ KQQQ fQ c cc c (33) that is to a nonlinear two-dimensional spectral problem [14,15]. The eigenvalues of this equatio of n form a set points of possible branching of solutions of a system of nonlinear Equations (29), (30). Corresponding eigen- functions are used to construct the branching-off sol-u tions of equations [16]. Note, that construction and justification of conver- gence of numerical algorithms to solve the nonlinear two-parametric spectral problem on eigenvalues (33) it is necessary to solve the corresponding auxiliary one-pa- rameter nonlinear spectral problem [14]. In this connec- tion at first we consider two-parameter nonlinear spectral problem on the general (operational) level in the Banach spaces. Copyright © 2011 SciRes. AM  P. SAVENKO ET AL. 1082 Nonlinear Spectral 4. Two-Dimensional Problem 4.1. Statement of the Problem. Existence Conditions of Descrete Spectrum of Operator-Function Note that different approaches are used to discretization of the original problems [7,14] at construction of the numerical algorithms to find the solutions of various typr spectral problems. That is to say that es of nonlinea original problems in the Banach functional spaces E are replaced by the corresponding problems in the fi- nite- he quesmate solutions of iscretization problems totions of initial prob- dimensional spaces n E (n). In addition t tion of convergence of ex approxi act solud lems, whenever dim n E, n is important, since the input and approximated equations are consid- ered in various spaces. Let E be a complex Banach space, 12 , be a vector parameter belonging to the domain 12 (open connected set) of the complex space 2 . Here ii , : iiii r 1, 2i, r be some real con- stant. Consider the ctioperator-funon ,: ,EE AL , which to each 12 , as thsignse operator 12 ,,EE AL, where ,EEL is the space of bounded linear operators [7]. co problem of Let usnsider the nonlinear two-parameter spectral the form 12 ,0x A, (34) in which it is necessary to find the eigenvalues 00 , 12 to them eigen-and corresponding vectors (0) x E(0) (x 00 12 , 0) such that 0 0x A. In pan rticular, in view of (33), the operator-functio 12 , is represented as 12 ,T A A 12 ,:I L,EE. (35) Here 12 ,T is a linear completely contin erator acti uous op- the Bang innach space EC and ana- t on two-dimensional parameter 12 , lyticallyn depende , I is a un Banach s ique . paces and also th operator in Let the E, E E n n e system () nn p P of linear bounded operators n E such that 1, 2, : n pE ,, n nE E pxxnx E (36) be. Operato bo givenrs n p are called conjunctive opera- tors [7,14]. From the principle of uniformundedness [14] for p the inequality follows n const n pn. very space E the elemLet in enn x ent be selected. Writing these elements in order to increase the numbers we shall form the sequence n x . her approachUsing eit scretizaton of ori problem the operator-function to diiginal ,EE is ,: AL approximated, respectly, by the approximate opera- tor-functions ive ,: ,nn EE n AL, n. As a re- sult, at each 12 , we obtain a sequence of operators (,) nnn EE AL which convergences to opera- tor (, )EE AL at satisfaction of theorresponding conditions. Definition of various type convergence of opera- tors c s of m (33)if In particular, described by (3 disc n A to A is given, in particular, in [14]. Discretization of original proble, choce o the spaces n E and determination of operators : nn pE E are realized in various ways. the opera- tor-function is5) and E is the separable (infinite-dimensional) Hilbertian space, one of the ap- proaches toretization (34) consists in the following. Consider an arbitrary complete orthonormal in E sys- tem if of functions 1 kk x . Each element x E can be presened as series t 1 kk k x cx where ,xx kk the Four coefficient of element c is rie x . If T 12 , is a ta linear continuous operator, acting in the separable Hil- bertian space it admits matrix represention [9]: 1212 ,1 ,, Mjk j k Tt , (37) where 12 12 ,,, j kkj tTxx . In addition a se- quence of the Fourier coefficients lement of e 12 , y Tx is obtaia sequencerier ned from of the Fou coefficients of element x as a result of multiplication of the matrix 12 (,) M T by coefficients ot f elemen x . Using the matrix representation of operator 12 , M T the spectral problem (34) is formulated as 12 12 ,, MMM xT Ix 0 A IM is a unit matrix in the s , (38) where pace of sequences 2 l.Thus, the operators ()T and ) M T( are equiva- lent in the sense that they to the same element x E assign one and the same element y E. But we obtain the Fourier coefficients of element y x as a result of action of or T on the element the operatM x . Os coincide,bviously, that eigenvalues of these operator that is the spectral problems (34) and (38) are equivalent. In this case we put that the finite dimensional spaces n E are generated by the bases 1 kk x (n) and to each n element x E the operators : nn pE E assign the element 1 n kk k x cx where , kk cxx. As a , operator result n M T approximated to s described M T i Copyright © 2011 SciRes. AM  P. SAVENKO ET AL.1083 rix-fuby the finite-dimensional matnction 1212 ,1 ,, n n Mjk j k Tt . (39) Apply other methods of discretization to (34), in par- ticular, the quadrature (cubproce for the case ature) sses of homogs integral equationge of deri-eneouns and cha vates by tnce analogfferential equa-heir differeues in di tions. Weroximate o find approxi- obtain appproblems t mate the lues and eigenvectorsmatrix opera-eigenva of tor-functions in the form 12 ,0, nn xn A. Moreover, the problem of determination the eigenval- ue (41) If (40) s is reduced to finding the roots of the determinant of n-th order that is the roots of equation 12 111 2121 211 2 211 22212212 , ,, , ,, , det n n n aa a aa a 0 ,, , 1122 1212 nn nn aa a n 12 , n A has form of (35), then , . k k Note if the coefficients ,12 ,12 ,12 ,, ,,1, jk jk jk tj atj 12 , ij a arguments, the are continuously differentiable functions of partial deriva- tives 12 , nj (j1, 2) vation [17]. are determined by the rules of determinant deri der the auxiliary eter s tral problem, necial case of (34). Assume that variable Consi nonlinear one-param cessary later on, as a spe pec- 2 in the operator-function 12 , A ated function is expressed ome one-valued fferenti-by sdi 21 z mapping the subdomain omain 1, 1 into some subd2,2 . In the simplest case we put 21 ( is some real pa- rametenoperatunction 111 ,z r). Itroduce the or-f AA for 11, , which is reduction of the operator-function 12 , A. We shall consider one-dimensional spectral problem 10x (42) A in which we assign to each value 11 ,z the operator 11 ,,zEE AL. Analogously to (40) we consider a approximate sequence of discrete problem of (42) 1 ,0 z n (43) Denote the spectrum of operator-function ,1 , nn x A 1 A as s A. Assume that 1, s A. For the spectrum sAof the prob w lem (34) the fol- lowing theorem is valid. Theorem 2. Let the folloing conditions be satisfied: 1) operator-function ,: ,EE AL is holo- morphic, and s A; 2) operator-functions ,:EE AL , n y closed bounded s nn et 0 are holomorphic and for an the following inequality 12 x , nc 0 ma Aconst ()n is valid; 3) operators 12 ,,EE AL , ,, n EE AL () 12 nn n are the Fredholm op- erators with zero index for any 12 , ; 4) spectrum 1, s A of func- tions and a sequence 12n, are differentiable in the domain ; 5) nAA is stable for any \rsAA . Then the following statements are true: 1) every point of spectrum 0 1s A is isolated, it is perator eigenvalue of the o 111 ,z ,AA the finite-dimensional eigubspa c ensce 0 1 N A and the finite-dimensional root subspace t; orrespond to i 2) for each 0 1s A there exists a sequence 0 1,n ,n s A 0 ()nn, s 0 n 1, from uch that 00 1, 1 n ; 3) each point 000 , 11 z is a spectrum int of the operator-function 12 , A; po 4) if in some 0 - neighborhood of the point 000 11 , z 12 2 ,0 nz , then in anll arbitrarily sma -neigh exists a contiuous differenti uncti borhood of that point there nable fon 2, 1 , 1), that is i bicylindric d which is solution of (4n some omain al 0 012011 2 ,: 0 12 2 , th m of the operator-function ere exists a connected component of spectru 2 , N (1 ,2 1 A are small real constants). ple te spectr Proof. The proof of Theorem is based on Theorems 1, 2 [14, p. 68, 69] and on existence of implicit functions (see, exam, [18]). At first we show that the conditions of Theorem 1 [14, p. 68] concerning the existence of discreum of operator-function 1 A rem. follow from the conditions of formulated Theo Under the conditions of Theorem the operator 12 , A is Fred- holm operator with zero index for each 12 , , and the operator-fu ,: ,EE is holo- mo Fro nction AL rphic. m here follows that at each 11, the operator 1 A, as reduction of the operator 12 , A, is also Fredholm operator with zero index, and the op- Copyright © 2011 SciRes. AM  P. SAVENKO ET AL. 1084 erator-function 11, :,EE AL is holomorphic. So, for the operator-function 1 A the conditions of Theorem 1 [14, p. 68] are satisfied, from which follows: each point 0 1()s A is isolated, it is the eigenvalue of the operator 1 () A, the finite-dal eigen- subspace and finite root subspace corres, each point 00 11 ,z is thespectrum point of thtor-function im p 0 ra ension ond to it. Thus e ope 12 , A. In addition, the conditions of Theorem 2 [14, p. 69] are satisfied for the operator-function 11, :,EE AL. From this t follows: at n larger than some 0n for each heorem 0 1s A there exists a sequence1,n from 1, ,nn s A such that 0 1, 1 n . Thus, each point (0)(0) 12 , 00 11 ,z is the eigenvalue of operator-function 11, : Atively, the eigen-,EEL and, respec value of operator-function ,: nn ence ,EE . n. AL 0 Since (44) 1, , nn s Ais the root of (41), then from here follows that 00 1, 1, ,0, n z From the converg of sequence 0s A to 0s 1, , nn 1 A follows arbitr that for anarily small num- ber 0 there existsber such num0 Nn that 00 1, N1 00 1, 1, ,0 NNN z and . Let 1, 2 be independent variables in the domain , and 0 0 121 1 z be a spectrum operator-function 00 ,, point of the 12 , A belonging to ss AA functions . Under the conditions of Theorem the 12 , n are differentiable z bo in and the neigh- rhood of the point 000 12 1 , 0 1 , 0 N 0 1, ,0 N z . In addition tt 1, 2 Nh 0gs to e poin 0 1, 1, , NN z belon -vicinity o . According to the Theorem ab of poi 1 f thet ere ex poin 0 0 12 ,out implicit 00 function in some neighborhoodnt 12 , th ists the continuous differentiable function 2N quation 12 ,0 N , and 1, 1, nN z tenc , solving the e 00 N . From here fo pectrum component of the llows exise of connected sor-func- tion operat ,:A,EEL in some bicylindrical domain 00 012 , 0111222 : , , where 1 ε, 2 are small real constants. oved. Theorem is pr Comment. Note that in the case of real para1 meters and 2 the presence of a singular point in the equation 12 , 0 [19] is one of the sus fficient criterionof action of condition sA. The point satisf 00 12 , is a singular point of the curve which is prese ,0 nted by the equation 12 when 00 12 1 , 0 , 00 12 , d the second 2 0 , an orre nonzero: der partial derivatives a 00 2 00 212 12 , ,0, 0, 22 12 00 2 12 , 12 0 () . These derivatives and tr derivatihe third-ordeves are continuous in the neighborhood of the point 00 12 , . If in addition 2 0000 22 12 12 ,, 00 2 12 22 12 12 , 0 , then the point 00 12 , is the second ordeot of r ro equation 12 (,) 0. Inside of a sufficiently small ra 00 dius circle with center at point 12 , the left part of equation 12 (,) 0 becomes zero only at point (0)(0) 12 (,) (0) (0) 12 ( ,) is the i , i.e. solated point of spectrum. 4.2. Finding the Connected Components of a Spectrum the exiThus, assumingstence of discrete spectrum 1, s A robl and solvi em (42), set of the eigenv ng an auxiliary one-dimensional spectral pwe find a alues 000 , 11 z , whichalso to the belongs perator-funcspectrum of otion ,: ,EE AL. To find the ccted comonneponents of a spectrum in some neighborhoods of the points 000 11 ,z consider thewe problem on finding the solutions of quation e 12 ,0 n , as the problem on finding the implicitly given function 221 at satisfaction of condition 00 12 2 ,0 n (or 112 at 00 satisfaction of condition 121 ,0 n ), solv- ing the corresponding Cauchy problem 00 12 1 2, dn 00 2 , 112 dn , (45) Copyright © 2011 SciRes. AM  P. SAVENKO ET AL.1085 ne-di orm 0 n . (47) alues of this problem n . (48) Solving the problem (45), (46) in some neig of the point co 00 1 1 z . (46) Corresponding (38) auxiliary omensional spectral s the f 2 problem ha nn Obviously, the eigenvare the 11 11 ,, nn MMM zxT zIx A roots of equation 111 det,0 nn MM M Tz I hborhood 12 , iii z , we find the i-th nnected component of spectrum of the operator-func- tion 12 , n M A. Return to finding the solutions of (33), in which are real spectral parameters. Let c, 1 2 c 12 , c, cc 12 ccc , where :0 ii cicic ccr . By direct check we set that for arbitrary values of parameters 12 ,c cc the func isnctions, where f (7). Write the neces tion ,,ccQfQ , ( 00 one of the eigenfu is the ini- 49) ,cfQ sa 0 tial solution ory in what follows equation 0,,, , Q 0 d QT F QfQKQQfQ ccQ c c 0 (5 ) conjugate with (33). For arbitrary 12 , c cc the fu nction 0 0 ,,ccQFQfQ (51) is one of the eigenfunctions of (33). The existence of distinct from identical to zero solu- tions of (33) for arbitrary ,cc indicates that there i 12 c nt of spectr he condition . To satisfy th , (51) from th s a connected componeum, coinciding with the domain. So, tof Theorem 2: is nois condit genfunct (49)e kernel of in- on c t satisfied ions c sA exclude ei ion we tegral equation (33). Consider the equati ,,,ccc QT QQ KdQQ , (52) where 0 0 00 00 ,, ,, , ,, QQK QQ fQ QQ cc cc K . (53) From the Schmidt Lemma [16, p. 132] follows that 1 ,FQ fQ c c is not characteristic value of (52) for any value ,cc , that is is not an eigenfun 12 equation. 0,cQ eby the conne n c cluded from ction of this Ther cted component domaiand corresponding to the function is ex the spectrum of operator. coinciding with th 0,cQ e Using (8) we are sure that for the kernel of operator c T is fulfilled the inequality 0 3 12 22 2 0 2 2 12 0 2 d , 2π ,d . 2π Q Q cc QQ 2 22 ,, dd , 1 QQQQ Q cc c c c c K Here is the measure of the domain . From e obtained inequality follows that c T is the Fred-th holm[20]. Moreover, it is a operator with zero index completely continuous operator in space 2 L [21]. Functions entering in the kernel of thr (35), e operato admit the analytic continuation into the complex domain c, if and are assumed as complex parameters. 1 c2 c Holomhy ofrator-function orp ope 12 ,cc A ,c 12 Tc I llows [14] from existence of partial fo deries vativ12 ,ccA i c 1, 2i at arbitrary pot in 00 12 , c cc owing to continuity ofkernel the ,,c QQ K according to a set of their variables in the domain c and existence and continuity of partial drivative es 12 , i cc c K 1, 2i, what is easy to verify. 52), 21 cc , we shall consider the onPutting in (e- dimensional o , (54) spectral prblem 11 ,, d QTcuQQc QQ K G where is ,, ,,, QQ cQQcc KK . Since Tc 111 1 f the operator ()Tc , from here follows that reduction o Tc is tholm operator with zero index for ane Fredhy 1 11, c , and the operator-function 1 :,IEE L is holomorphic. T A If 1 s A, from holomorphy of operator-function and from the Fredholm property of the kernel 111 ,, ,,, QQ cQQcc KK satisfaction of the con- ditions of Theorem 2 follows. In accordance with this Theorem every point 0 cs is i it is 1solated and the A eigenv 00 alue of (54). Respectively, the points 12 ,cc 0 1 c are eigenvalues of (54 0 1 ,c ). To find the spec- trum connected components (s of 52) in the vicinitie points (0) (0) 12 ,cc we solve the Cauchy problem (45) Copyright © 2011 SciRes. AM  P. SAVENKO ET AL. 1086 an46), usingd ( the found solutions of auxiliary problem (54) as initial conditions. ically the ei- iary problem (43). Consider 4.3. Numerical Finding the Eigenvalues of the Problem We shall construct algorithms to find numer genvalues of (54) what corresponds to auxil some convergent cubature process [14] 1 d, n jn jnn j xQQa xQxn (55) with coefficients jn a and nodes jn Q (1jn). We reject the remainder term n x in (55) nd replace integral in (52a) by it. Giving the variable in thsional spaces Q us values in QQ (1in), we have the homogeneo system of linear algebraic equations concerning ,u: 1, nnn u 11 1 ,,, 1 n n inMnjnin jnjn j uTcuaQQcuin K(56) where uuQ. Solving the eigenvalue problem (56) in in e finite-dimen n EC, n w approxialues, convergent to exact solutions as Finding , in These stions of equation we denote as . Return to two-dimensional spectral prob plying the (55) to (52), we obtain a system of lin ns similar to , 0 n (59) we consider as a problem on finding the impl fu chylem (4 e find mate eigenv of the problem (54). the eigenvalues of (56) is reduced particu- lar, to finding the roots of equation 11 det 0 n nMn cTcI . (57) olu n 1 i c lem (52). Ap- ear equatio (56) 12 12 1 ,, n n inMjnin jnjn j uTcc uaQu K (58) , 1. Q cc in Finding the solutions of equations 12 12 ,det , n nM ccT ccI icitly given nction 221 ccc, reducing it to the Cau prob 5), (46). Since to each isolated root of this equation corresponds eigenvalue nditions 121 1 ,, iii i ccc c of prob- lem (58) we use solutions of (57) as the initial co (46). Thus, we determine the initial conditions (46) for the Cauchy problem as . If 211 iii ccc 12 2 ,0 ncc c then solving the problem (45) (46) in the differentiable each vicinity of points 1 i c, we find function 21i cc which satisfies the condition 1 ii cc In the case, when 11 , ii cc is of a real eigenvalue the problem (57), 21i cc are real differentiable functions describing in the vicinity of points 11 , ii cc some smooth curves. Tse thhat is, in this cae equations (52) and (33) have a linear spectrum, respectively. Thus, solving the proble (57) and (58), we find a setms of values of parameters c at which the bran- 12 c ,c ching of ctions of Equation (7) from the real omplex solu initial solution 0 f,cQ at 0 , 0 is possible. U Functional has smon branching- aller values ofhe solution xamples f solutions than on t ,cfQ . 5. Algorithm of Finding the Solutions of Nonlinear Equation. Numerical E 0 Present one of iterative processes for numerical finding the solutions of system (13), based on the successive approximations method: 1 11 12 122 ,, 0,1,. nn n vI BBuvn 1 11 1112 1 ,, nnn uIBBuv (60) Before it was shown that the inverse operators 1 1 . 1 11 IB ited. and 21 IB exist and are lim 1 1 In the case of even on both arguments function , F 12 ss and symmetric domains G and at exe- cution of iterative process (60) it is appropriate to use the invariance property of the integral operators B1(u,v) and B2(u,v) in the system (13) concerning the type of parity of functions u(s1,s2), v(s1,s2). Functions and hav- ing some type of parity on the correspng am belong to the invariant sets and of u ondi kl V v rgu the s ent pace ij U ()C where the indices taes 0 1. In pa ,,,klij ke valu or rticular, if 12 01 ,us sU then 12 ,uss , 12 ,uss 12 ,us s. By the 1 s 2 ,us direct check wone are ct there are such inclu-vinced tha sions: 12 ,, B ij klijijklkl ij klij kl BUVUBUVV UV UV (61) From these relations, in particular, follows the possi- bility of existence of fixed points of operator B be- longing to the corresponding invariant set, that is to solu- tions of (13) and, respectively,). (7 Substitute into (10) the function arg n fQ arctg nn vQuQ f succes- obtained on the basis o sive approximations (60). As a result we have a sequence of function values which we denote as {Un}. For this sequence the Theorem 4.3.2 and corollary 4.3.1 [4], and Copyright © 2011 SciRes. AM 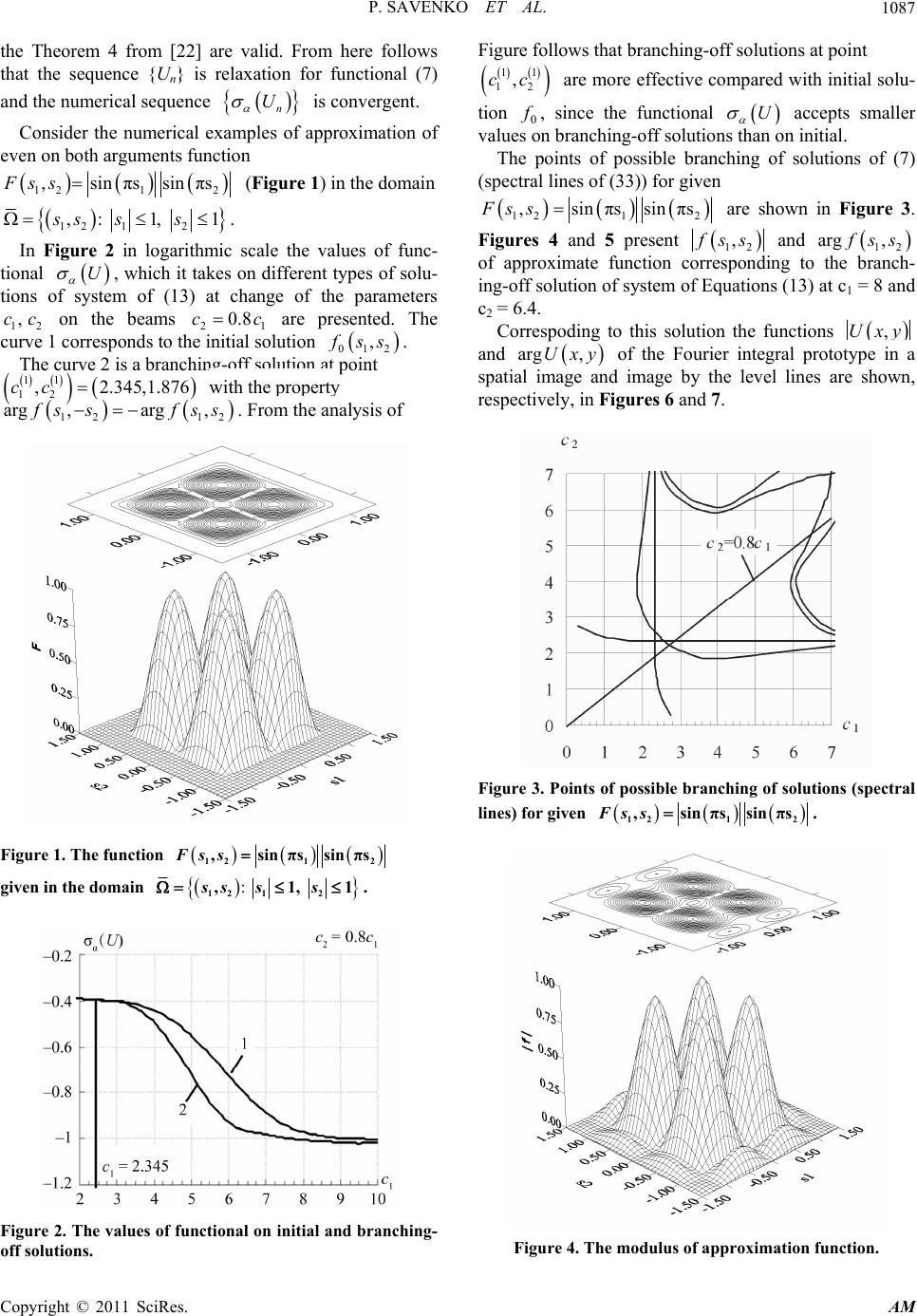 P. SAVENKO ET AL.1087 the Theorem 4 from [22] are valid. From here follows that the sequence {Un} is relaxation for functional (7) and the numerical sequence n U is convergent. Consider the numerical examples of approximation of even on both arguments function 121 2 ,sinπssinπsFss (Figure 1) in the domain 12 12 ,: 1,1ssss . In Figure 2 in logarithmic scale the values of func- tional U , which it takes on different types of solu- tions of system of (13) at change of the parameters 12 ,cc on the beams 21 0.8cc are presented. The curve 1 corresponds to the initial solution 012 , f ss . The curve 2 is a branching-off solution at point o 11 , 2.345,1.876cc with the prrty 12 pe 12 1 arg ,arg , 2 f ss fsshe analysis of . From t Figure 1. The function 1212 ,sinπssinπsFss given in the domain : 12 12 ,1,ssss.1 F Figure follows that branching-off solutions at point 11 12 ,cc are more effective compared with initial solu- igure 2. The values of functional on initial and branching- off solutions. tion , since the functional 0 f U accepts smaller valu branching-off solution initial. es onns than o The points of possible branching of solutions of (7) (spectral lines of (33)) for given 1212 ,sinπssinπsFss are shown in Figure 3. 12 , f ssFigures 4 and 5 present and 12 arg , f ss of approximate function corresponding to the branch- ing-off solution of system of Equations (13) at с1 = 8 and с2 = 6.4. Correspoding to this solution the functions ,Uxy and arg ,Uxy of the Fourier integral prototype in a spatial image and image by the level lines are shown, respectively, in Figures 6 and 7. Figure 3. Points of possible branching of solutions (spectral lines) for given 1212 ,sinπssinπsFss . Figure 4. The modulus of approximation function. Copyright © 2011 SciRes. AM 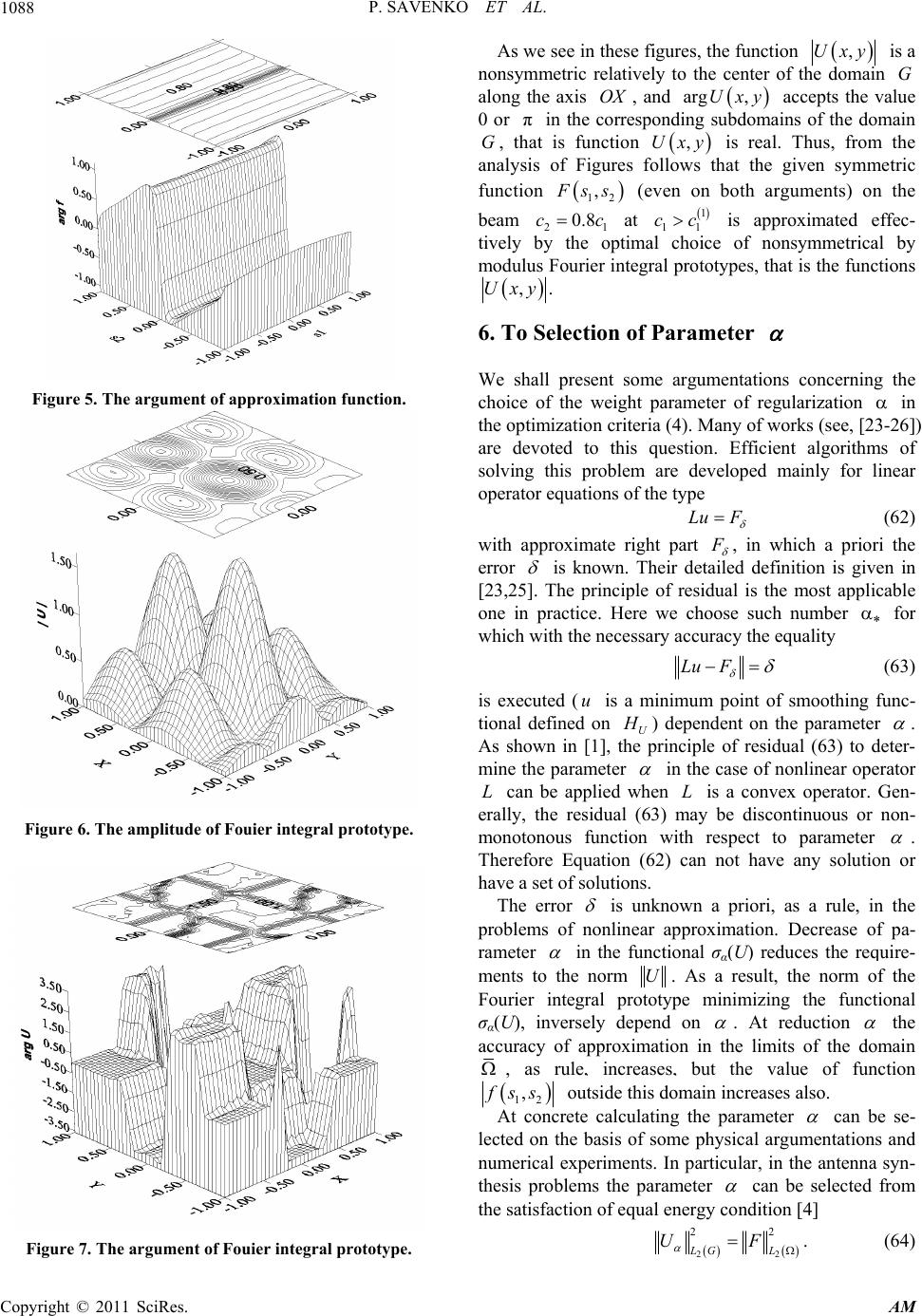 P. SAVENKO ET AL. 1088 Figure 5. The argument of approximation function. Figure 6. The amplitude of Fouier integral prototype. Figure 7. The argument of Fouier integral prototype. ,Uxy e domain As we see in these figures, the function is a nonsymmetric relatively to the center of th along the axis , and accepts the 0 or in thondins of the dom , t is funct G value ain OX e corresp ion arg ,Uxy ing subdomaπ hat G ,Uxy is real. that the Thus, from given symme function the tric analysis of Figures follows 12 , F ss (even on both arguments) on the beam 21 0.8cc at is approximated effec- tively btimce of nonsymmetrical by modulntegypes, that is the functions 1 11 cc al choi ral protot y the op us Fourier i ,.y Ux 6. To Selection of Parameter We shall present some argumentations concerning the choice of the weight parameter of regularization in the optimization criteria (4). Many of works (see, [23-26 ]) areof soly for l devoted to this question. Efficient algorithms lving this problem are developed maininear operator equations of the type LuF (62) with approximate right part F , in which a priori the ror er is known. Thiled definition is given in eir deta [23,25]. The principle of residual is the most applicable one in practice. Here we choose such number for which acy the equality with the necessary accur LuF (63) is execu is a minimum point of smoothing func-uted ( tional defid on U H ne ) dependent on the parameter . As shown in [1], the principle of residual (63) to deter- mine the parameter in the case of nonlinear operator L can be applied when L is a convex operator. Gen- erally, the residual (63) may be discontinuous or on-n monotonous function with respect to parameter . Therefore Equation (62) can not have any solution or have a set of solutions. The error is unknown a priori, as a rule, in the problems of nonlinear approximation. Decrease of pa- rameter in the functional (U) reduces the require-σα ments to the norm U. As a result, the norm of the Fourier integral prototype minimizing the functional σα(U), inversely depend on . At reduction the accuracy of approximation in the limits of the dain om , as rule, increases, but the value of function 12 ,fss outside this domain increases also. At concrete calculating the parameter can be se- lected on the basis of some physical argumentations ad numerical experiments. In particular, in the antenna syn- thesis problems the rameter n pa can be selected from e satisfaction of equal engy condition [4] ther 2 2 22 UF . (64) L LG Copyright © 2011 SciRes. AM 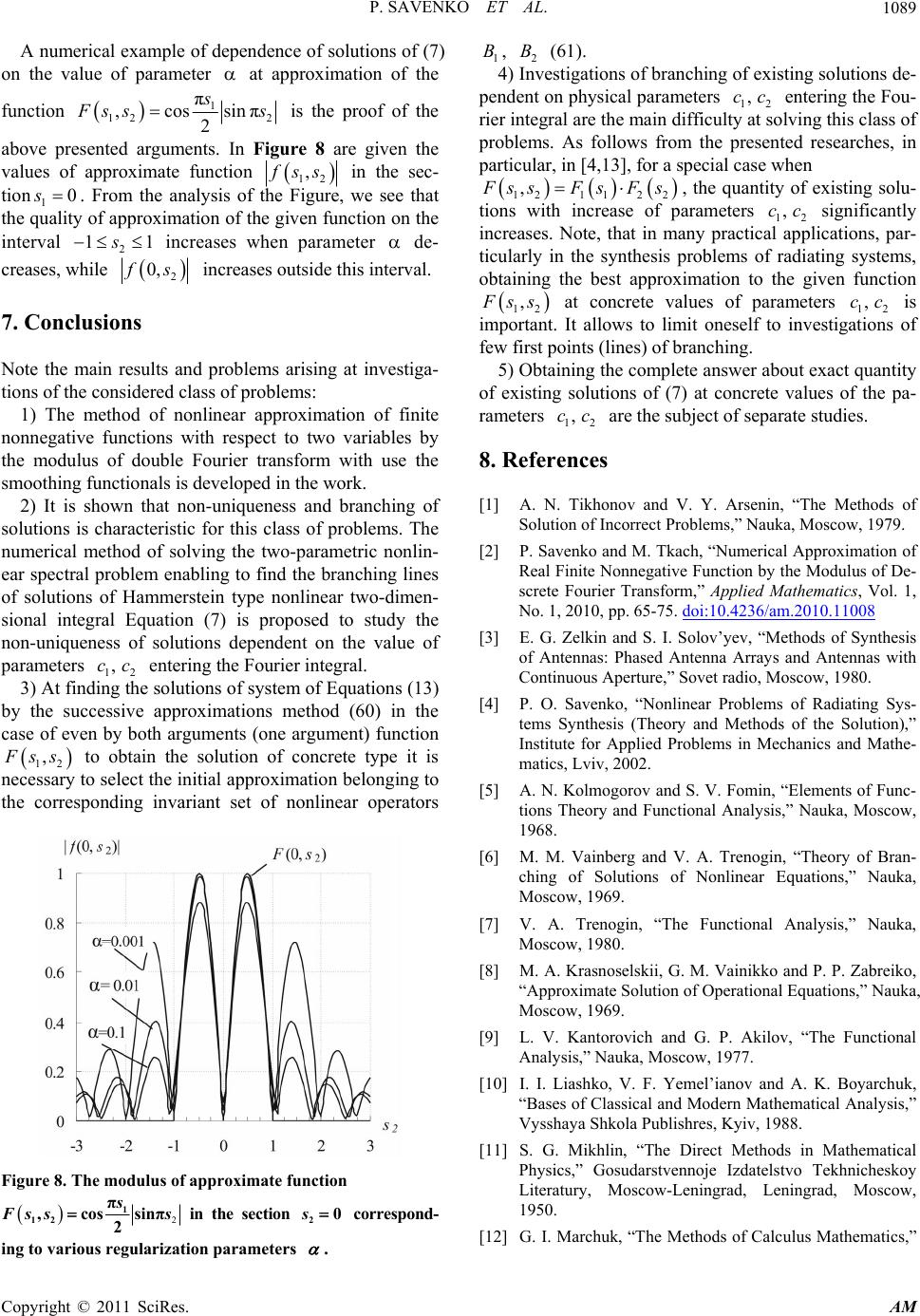 P. SAVENKO ET AL.1089 (A numerical example of dependence of solutions of7) on the value of parameter at approximation of the function 1 12 2 c ossinπ 2 πs , F ss s is the proof of the above presented arguments. In Figure 8 are given the values oapproximate function f 12 ,fss in the sec- tion 10s. From the analysis of the Figure, we see that the quality of approximation of the given function on the interval 2 11s increases hen parameter w de- creases, while 2 0,fs increases outside this interval. 7. the modulus of double Fourier transform sm i method of solving the tw nlinear i s ase of even by both arguments (one argument) function Conclusions Note the main results and problems arising at investiga- tions of the considered class of problems: 1) The method of nonlinear approximation of finite nonnegative functions with respect to two variables by with use the oothing functionals is developed in the work. 2) It is shown that non-unqueness and branching of solutions is characteristic for this class of problems. The numericalo-parametric nonlin- ear spectral problem enabling to find the branching lines of solutions of Hammerstein type no two-dimen- sional integral Equation (7) is proposed to study the non-uniqueness of solutions dependent on the value of parameters ,cc entering the Fourier integral. 3) At fsolutions of system of Equation (13) 12 nding the by the successive approximations method (60) in the c 12 , F ss to obtain ecessary to select th the solution of concrete type it is e initial approximation belonging to n the corresponding invariant set of nonlinear operators Figure 8. The modulus of approximate function 2 1 12 π ,cossinπ 2 s F ss s in the section 20s correspond- ing to various regularization parameters . 1 B, 4) 2 B Inve (61). stigations of branching of existing solutions de- pendent on physical parameters entering the Fou- rier integral are the main difficulving this class of problems. As follows from the ted researches, in particular, in [4,13], for a spec 12 ,cc lty at so presen ial case when 121 122 , F ssFsF s tions with increase of pa , the f existing solu- significantly quantity o rameters 12 ,cc increases. Note, that in many practical applications, par- ticularly in the synthesis probleing systems, ms of radiat obtaining the best approximativen function on to the gi 12 , F ss at concrete valuesters is of parame12 ,cc important. It allows to limit onestig of eself to invations few first points (lines) of branching. 5) Obtaining the complete answer about exact qutity of thpa- dies. [1] .11008 an e of existing solutions of (7) at concrete values rameters ,cc are the subject of separate stu 12 8. References A. N. Tikhonov and V. Y. Arsenin, “The Methods of Solution of Incorrect Problems,” Nauka, Moscow, 1979. [2] P. Savenko and M. Tkach, “Numerical Approximation of Real Finite Nonnegative Function by the Modulus of De- screte Fourier Transform,” Applied Mathematics, Vol. 1, No. 1, 2010, pp. 65-75. doi:10.4236/am.2010 [3] E. G. Zelkin and S. I. s and Instid Ma , “Elements of Func- . VaiBran- of Solutions of . in, “The Functional Analysis,” Nauka, Solov’yev, “Methods of Synthesis of Antennas: Phased Antenna Array Antennas with Continuous Aperture,” Sovet radio, Moscow, 1980. [4] P. O. Savenko, “Nonlinear Problems of Radiating Sys- tems Synthesis (Theory and Methods of the Solution),” tute for Applied Problems in Mechanics anthe- matics, Lviv, 2002. [5] A. N. Kolmogorov and S. V. Fomin tions Theory and Functional Analysis,” Nauka, Moscow, 1968. [6] М. Mnberg and V. А. Trenogin, “Theory of ching Nonlinear Equations,” Nauka, Moscow, 1969 ] V. A. Trenog[7 Moscow, 1980. [8] М. А. Krasnoselskii, G. М. Vainikko and P. P. Zabreiko, “Approximate Solution of Operational Equations,” Nauka, Moscow, 1969. [9] L. V. Kantorovich and G. P. Akilov, “The Functional Analysis,” Nauka, Moscow, 1977. [10] I. I. Liashko, V. F. Yemel’ianov and A. K. Boyarchuk, “Bases of Classical and Modern Mathematical Analysis,” Vysshaya Shkola Publishres, Kyiv, 1988. [11] S. G. Mikhlin, “The Direct Methods in Mathematical Physics,” Gosudarstvennoje Izdatelstvo Tekhnicheskoy Literatury, Moscow-Leningrad, Leningrad, Moscow, 1950. [12] G. I. Marchuk, “The Methods of Calculus Mathematics,” Copyright © 2011 SciRes. AM  P. SAVENKO ET AL. Copyright © 2011 SciRes. AM 1090 avenko, “The Branching of Solutions of Antennas sshykh Uchebnykh Zavedeniy Radioel , “Analysis of Discretized Methods,” mensional Nonlinear Spec- oscow, 1965. ekhniko-teoreticheskoje Izdata- w, 1933. lin, “Variational Methods in Mathematical tics and Mathematical Physics, eference Textbook,” olving the yi, V. V. Stepanov and roblems in Reflexive Nauka, Moscow, 1977. [13] P. O. S [20] Synthesis Problems According to the Given Amplitude Directivity Pattern with Use of Regularization Function- als,” Izvestija Vyek-P tronica, Vol. 39, No. 2, 1996, pp. 35-50. [14] G. M. Vainikko Tartuskiy Gosudarstvennyy Universitet, Tartu, 1976. [15] P. A. Savenko and L. P. Protsakh, “Implicit Function Method in Solving a Two-di tral Problem,” Russian Mathematics (Izv. VUZ), Vol. 51, No. 11, 2007, pp. 40-43. [16] М. M. Vainberg and V. А. Trenogin, “Theory of Bran- ching of Solutions of Nonlinear Equations,” Nauka, Mos- cow, 1969. [17] I. G. Petrovskii, “Lectures on the Theory of Ordinary Differential Equations,” Nauka, Moscow, 1970. [18] V. I. Smirnov, “Course of High Mathematics, vol. 1,” Nauka, M [19] A. Gursa, “Course of Mathematical Analysis, Vol. 1, Part 1,” Gosudarstvennoje T Spac lelstvo, Leningrad, Mosco P. P. Zabreiko, А. I. Koshelev and М. А. Krasnoselskii, “Integral Equations,” Nauka, Moscow, 1968. [21] S. G. Mikh hysics,” Nauka, Moscow, 1970. [22] P. A. Savenko, “Numerical Solution of a Class of Nonlinear Problems in Synthesis of Radiating Systems,” Computational Mathema Vol. 40, No. 6, 2000, pp. 889-899. [23] A. F. Verlan and V. S. Sizikov, “Integral Equations: Methods, Algorithms, Programs. R Naukova Dumka, Kyiv, 1986. [24] V. A. Morozov, “Regularizing Methods of S Incorrect Problems,” Nauka, Moscow, 1987. [25] A. N. Tikhonov, A. V. Goncharsk A. G. Yagola, “Regularizing Algoritms and a Priori In- formation,” Nauka, Moscow, 1983. [26] A. G. Yagola, “About Selection of Regularizing Para- meter in the Solution of Incorrect P es,” Journal of Computational Mathematics and Mathematical Physics, Vol. 20, No. 3, 1980, pp. 586-596. |