 American Journal of Computational Mathematics, 2011, 1, 176-182 doi:10.4236/ajcm.2011.13020 Published Online September 2011 (http://www.SciRP.org/journal/ajcm) Copyright © 2011 SciRes. AJCM Haar Wavelet Quasilinearization Approach for Solving Nonlinear Boundary Value Pr oblems Harpreet Kaur1, R. C. Mittal2, Vinod Mishra3 1,3Department of Mat hematics, Sant Longowal Institute of Engineering & Technology, Longowal, India 2Department of Mat hem at i cs, Indian Institute of Techn ology Roorkee, Roorkee, India E-mail: {maanh57, mishravinod560}@gmail.co m, mittalrc@iitr.ernet.in Received May 16, 2011; revised June 14, 2011; accepted June 26, 2011 Abstract Objective of our paper is to present the Haar wavelet based solutions of boundary value problems by Haar collocation method and utilizing Quasilinearization technique to resolve quadratic nonlinearity in y. More accurate solutions are obtained by wavelet decomposition in the form of a multiresolution analysis of the function which represents solution of boundary value problems. Through this analysis, solutions are found on the coarse grid points and refined towards higher accuracy by increasing the level of the Haar wavelets. A distinctive feature of the proposed method is its simplicity and applicability for a variety of boundary condi- tions. Numerical tests are performed to check the applicability and efficiency. C++ program is developed to find the wavelet solution. Keywords: Haar Wavelets, Quasilinearization Technique, Haar Collocation Method, Boundary Value Problems 1. Introduction Wavelets are mathematical tools that cut up data, func- tions or operators into different frequency components and then study each component with a resolution match- ing its scale. Much of the work on Haar functions was performed in the 1930s. In 1909, Haar discovered the simplest function now called as Haar wavelet. The inte- gral of Haar family called Haar operational matrix was derived by Chen and Hsiao [1] in 1997. Since then the solutions of dynamical systems in a wavelet framework took tremendous growth. In order to take the advantages of the local property, many authors researched the Haar wavelet to solve the linear stiff systems and differential equations [2-4]. Haar function is a rectangular pulse pair. It is infact the Daubechies wavelet of order one and is the simplest of the orthonormal wavelets with compact support. As shortcoming, Haar wavelets are not continuous; their derivatives do not exist at the points of discontinuities. Thereby direct application of Haar wavelet is not possi- ble in solving differential equations but here one possi- bility is through integration of wavelets [2]. The pro- posed technique in this paper is based on collocation framework and utilizes the capabilities of Haar wavelet basis which permits to enlarge the class of functions through Quasilinearization. Our main concentration on the following type of nonlinear boundary value problems defined in the interval [a, b]. 1 ,, ,,n n yt ftyyy (1) subject to boundary conditions 12 1 3 12 1 3 ,, ,, ,, ,, nn nn yay a yay a yby b yby b f is a continuous function, in case of nonlinearity of f is at most quadratic in y. 2. Preliminary Works 2.1. Haar Wavelets Fourier transform analyzes the composition of a given function in terms of sinusoidal waves of different fre- quencies and amplitudes whereas wavelets analysis tells how a given function changes from one time period to  H. KAUR ET AL. 177 the next. Wavelet analysis is also more flexible in sense that one can choose a specific wavelet to match the type of function being analyzed. For a function , defined over the real axis , , is classed as a wavelet if it satisfies the following three properties: 1) The integral of is zero: d0tt 2) The integral of the square of is unity: is finite. 2dtt 3) Admissibility condition: 0 ˆdsatisfies 0.C C The Haar scaling function for 0,1t is defined as 0 1if0 1 0elsewhere t ht (2) and corresponding wavelet function 1 1 1if0 2 1 1if0 2 0elsewhere t t ht (3) Also the graph of is shown in Figure 1 [1]. The orthogonality property puts a strong limitation on the construction of wavelets. It is known that the Haar wavelet is the only real valued wavelet that is compactly supported, symmetric and orthogonal. Thus Haar wave- lets is orthogonal square waves family with mag- nitude and zero, generally written as i ht 1 122 j i k ht ht for . 2,21,0, 021 j ii kjk j 2.2. Multiresolution Analysis Objective of this section is to construct a wavelet system, which is complete orthonormal set in The idea of multiresolution analysis is to represent a function f as 2 LR 1 1 0 0.5 1 t h 1 (t) Figure1. First haar wavelet. a limit of successive approximations and decomposition of the whole function space into individual subspaces 1 j VV . A multiresolution analysis (MRA) of 2 LR is defined as a sequence of closed subspaces of V of 2 LR, jZ , that satisfy the following axioms: 1) Monotonicity 101 VVV 2) The spaces V satisfy and jz j VLR 2jz j V 0. 3) 0 tV iff 2jj tV jZ i.e. the space V are scaled versions of the central space . 0 V 4) There exists 0 V s.t. is a Ri- esz basis in . ,tkkZ 0 The sequence V 2jj , jk kforms an orthogonal basis for 22ttk V by using the multiresolution analysis axioms. The space V is used to approximate general functions by defining appropriate projection of these functions onto these spaces. The vector space is the orthogonal complement of j W 1jj VV . In other words, we will let be the space of all functions in under the chosen inner product. See [5] for detail of MRA. As an example the space can be defined like j W j V j V 1112 2 0 1 1 , jj jjjj j J j VW VW WV WV then the scaling function generates an MRA for the sequence of spaces 1 ht Z, j Vj by translation and dilation as defined in (2) and (3). The linearly independ- ent functions ,jk t spanning W are called wavelets. Original signal can be expressed as a linear combination of the box basis functions in V. These basis functions have two important properties: orthogonality property with 0,00,01,0 1,1 ,,,ttt t and normalization of 2 ,22, , jj jk ttkj kZ . 3. Haar Wavelet Integration and the Quasilinearization Approach The wavelets corresponding to the box basis are known as the Haar wavelets. 1for , 1for, , 0 elsewhere i t ht t , (4) Here 0.5 1 ,,,2, kk k m mm m 0,1,, .jJ J indicates the level of resolution. The integer 0,1, ,k 1m is the translation parameter. The in- dexing i in (4) is calculated as . In case with 1imk Copyright © 2011 SciRes. AJCM 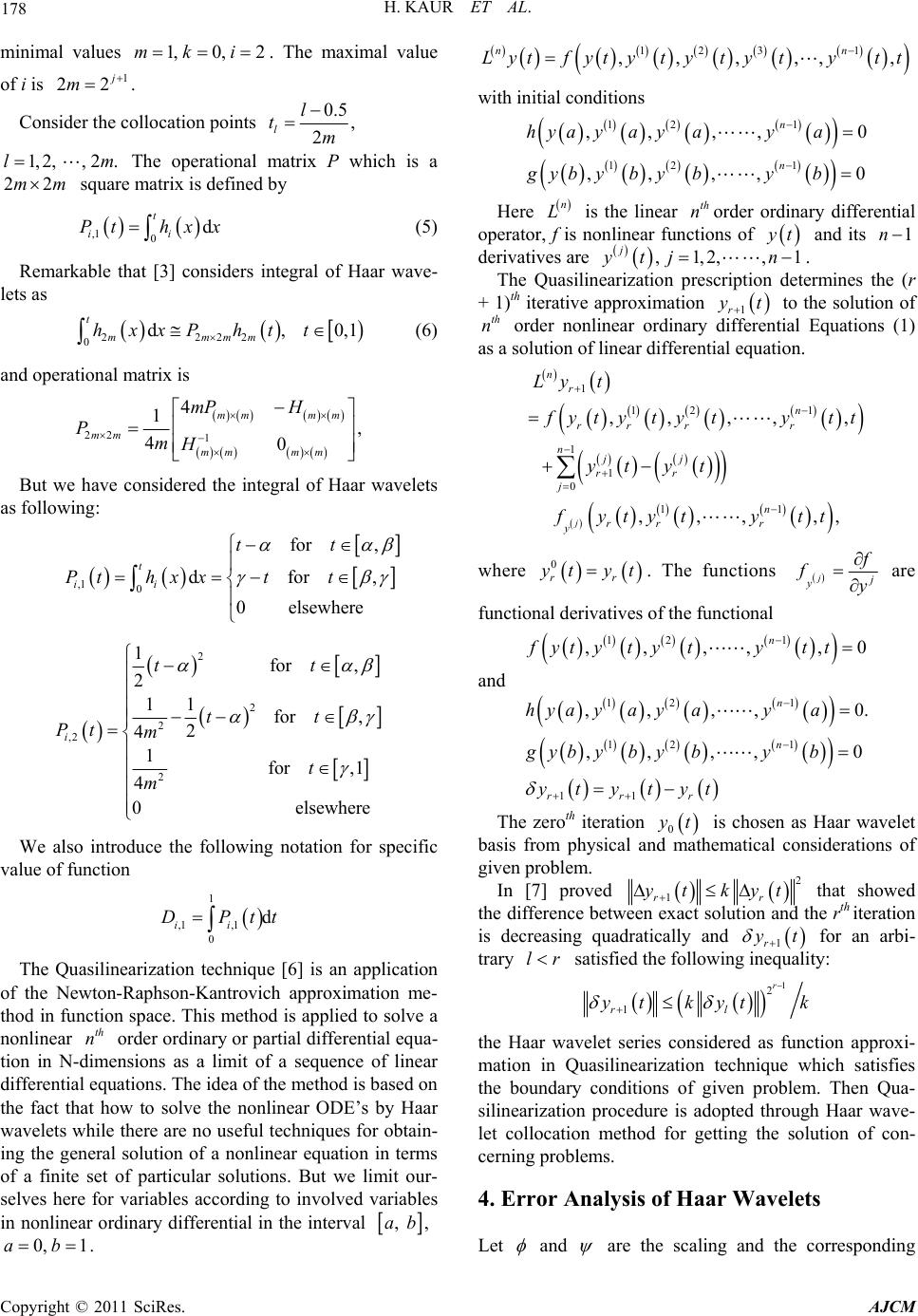 178 H. KAUR ET AL. minimal values . The maximal value of i is 1,0, 2mk i 1 22 m . Consider the collocation points 0.5 , 2 ll t 0d t ii hxx 222 d mm m hxxPh m 0,1 1, 2l 22m ,,2.m m ,1 Pt 0 t The operational matrix P which is a square matrix is defined by (5) Remarkable that [3] considers integral of Haar wave- lets as 2 , m t t (6) and operational matrix is 1 4 1, 40 mm mm mm mm mP H mH 22 mm P But we have considered the integral of Haar wavelets as following: 0 for , dfor 0elsewhere t ii tt hxx tt ,1 Pt , 2 2 2 ,2 i Pt 2 1for , 2 11 for , 2 4 1for ,1 4 0elsewhere tt tt m t m t th n We also introduce the following notation for specific value of function 1 ,1 ,1 0 d ii DPt The Quasilinearization technique [6] is an application of the Newton-Raphson-Kantrovich approximation me- thod in function space. This method is applied to solve a nonlinear order ordinary or partial differential equa- tion in N-dimensions as a limit of a sequence of linear differential equations. The idea of the method is based on the fact that how to solve the nonlinear ODE’s by Haar wavelets while there are no useful techniques for obtain- ing the general solution of a nonlinear equation in terms of a finite set of particular solutions. But we limit our- selves here for variables according to involved variables in nonlinear ordinary differential in the interval , ,ab . 0,a1b 123 1 ,, ,,,, nn Lytfytyt ytytytt with initial conditions 12 1 12 1 ,, ,, ,, ,, n n hya yayaya gyby bybyb 0 0 Here is the linear order ordinary differential operator, f is nonlinear functions of n Lth n t and its 1n derivatives are 2, j yt,1,j,n1 . The Quasilinearization prescription determines the (r + 1)th iterative approximation 1r t to the solution of order nonlinear ordinary differential Equations (1) as a solution of linear differential equation. th n 1 121 1 1 0 11 ,,,, , ,,,,, j nr n rr rr njj rr j n rr r y Ly t ytytytytt yt yt fytyty tt where 0 rr yt yt. The functions j y fy are functional derivatives of the functional 121 ,,,,, n fytyt ytytt 0 and 12 1 12 1 11 ,, ,, ,, ,, n n rrr hyay ayaya gyby bybyb ytytyt 0. 0 The zeroth iteration 0 t is chosen as Haar wavelet basis from physical and mathematical considerations of given problem. In [7] proved 2 1rr that showed the difference between exact solution and the rth iteration is decreasing quadratically and yt kyt 1r t for an arbi- trary lr satisfied the following inequality: 1 2 1 r rl tkyt k the Haar wavelet series considered as function approxi- mation in Quasilinearization technique which satisfies the boundary conditions of given problem. Then Qua- silinearization procedure is adopted through Haar wave- let collocation method for getting the solution of con- cerning problems. 4. Error Analysis of Haar Wavelets Let and are the scaling and the corresponding Copyright © 2011 SciRes. AJCM  H. KAUR ET AL. 179 wavelet function of respectively, also imply the relations 2 LR dtt d1, 0tt (the moment properties). The following dilation relation holds: 2thtl 2 1 2 L l lL 12 ,,L Z (7) with some and the family wavelets hlR L 2 , 2 , 22 , 22 ,, jj jk jj jk ttk ttkjk Z P and Q be the corresponding projections 1 ,, ,, ,, ,, ,d ,d jjj jjkjkjkjk jjkjkjkj VVW Pyccy t Qyddy t k Let 21 MMp of the supports of wavelets and . M stands for th moment of wavelet func- tion. Then according to [8], we have the following theo- rem: Theorem. Assume the moment condition. For y , l CR 1k, the following estimation holds: 2 max , j l jwt M yPy Ayw jZ where stands for derivative of y. l yw Remark. For Haar function, . Let be bounded first derivative on (0,1) such that 12 1,0, 1MMM 2 yLR l yw SThen error at jth level will be given by 22 kj kj jj yPyRSyPyA A and R are suitable real constants. 5. Function Approximations Orthogonality of Haar wavelets ensures that any square integral function over [0, 1] can be expressed as an infi- nite sum of Haar wavelets as 1 , ii i taht where ’s are wavelet coefficients. i a If t is piecewise constant or can be approxi- mated as piecewise constant during each subinterval, then sum can be terminated to finite term as [8] 1 2T 1 j ii i ytahtaH A function 2 LR is a MRA of 2 LR pro- duces a sequence of subspaces V of 2 LR, jZ s.t. the projection of f onto these spaces give finer ap- proximation of the function f as . j To demonstrate the applicability of Haar wavelets, we focus on the following nonlinear BVP’s and utilizing C++ Programming and MATLAB Software. In finite element method the approximate solution can be written as a linear combination of basis functions which consti- tute a basis for the approximation space under considera- tion. Here in Haar collocation method the series is taken as the highest derivative of given differential equation as a linear combination of Haar wavelet basis. 1 2 1 j nii i tah t Subsequent integrations give lower derivatives and t. Substituting the values in the given equation gives the coefficients and hence the solution. 6. Test Problems 6.1. Nonlinear Boundary Value Problems 6.1.1. Two Point Boundary Value Problem Firstly, the application of Haar wavelets by Quasilin- earization has been performed on the second order BVP of purely mathematical nature [9] which posses analytic solution and given by: 22 4 2πcos 2πsin π, 01,00and10. yyttt ty y (8) with analytic solution 2 sin πyt t . Approximate the solution as πsin n t By wavelet based Quasilinearization technique, 2 2sin πsinπyttyt t 2 t and Equation (8) be- comes 21 224 2sin π2sinπ sin π2πcos2πsin π. aHtP ttP tt Efficiency of method for solution of second order BVP problem is depicted in Figure 2, for j = 2 and j = 3. 6.1.2. Fourth Order Boundary Value Problem Consider the fourth order nonlinear boundary value problem [10] 210 9 8 7 64 ''''4 448 412048, 01. yyttttttt t Copyright © 2011 SciRes. AJCM 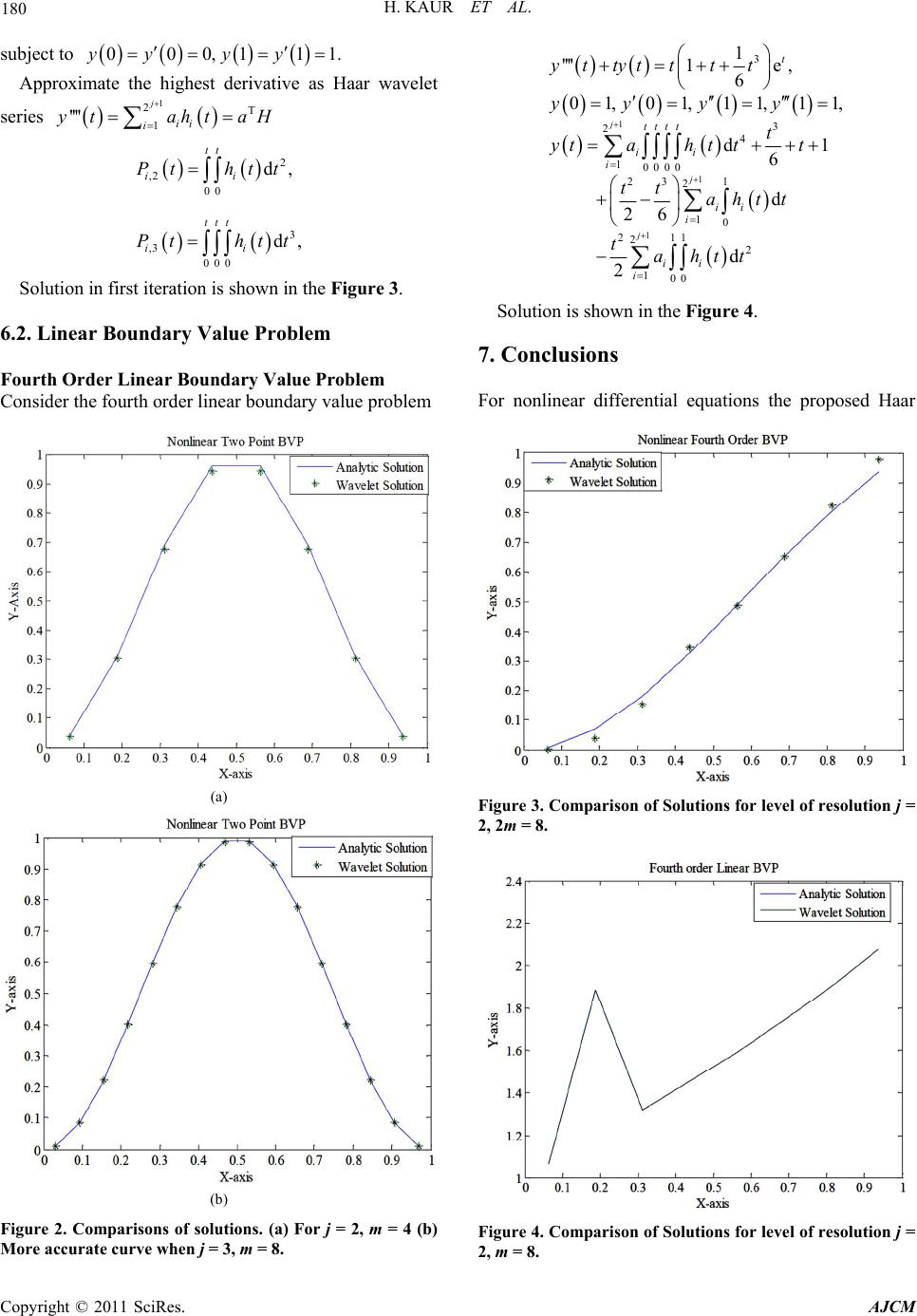 180 H. KAUR ET AL. subject to 000,11yy yy 1. Approximate the highest derivative as Haar wavelet series 1 2T 1 '''' j ii i ytaht aH 2 ,2 00 3 ,3 000 d, d, tt ii ttt ii Pt htt Pt htt Solution in first iteration is shown in the Figure 3. 6.2. Linear Boundary Value Problem Fourth Order Linear Boundary Value Problem Consider the fourth order linear boundary value problem (a) (b) Figure 2. Comparisons of solutions. (a) For j = 2, m = 4 (b) More accurate curve when j = 3, m = 8. 1 1 1 3 3 24 10000 1 23 2 10 11 222 100 1 ''''1e , 6 01,01, 11, 11 d1 6 d 26 d 2 j j j t tttt ii i ii i ii i yttytttt yy yy t ytah ttt tt aht t tahtt , Solution is shown in the Figure 4. 7. Conclusions For nonlinear differential equations the proposed Haar Figure 3. Comparison of Solutions for level of resolution j = 2, 2m = 8. Figure 4. Comparison of Solutions for level of resolution j = 2, m = 8. Copyright © 2011 SciRes. AJCM 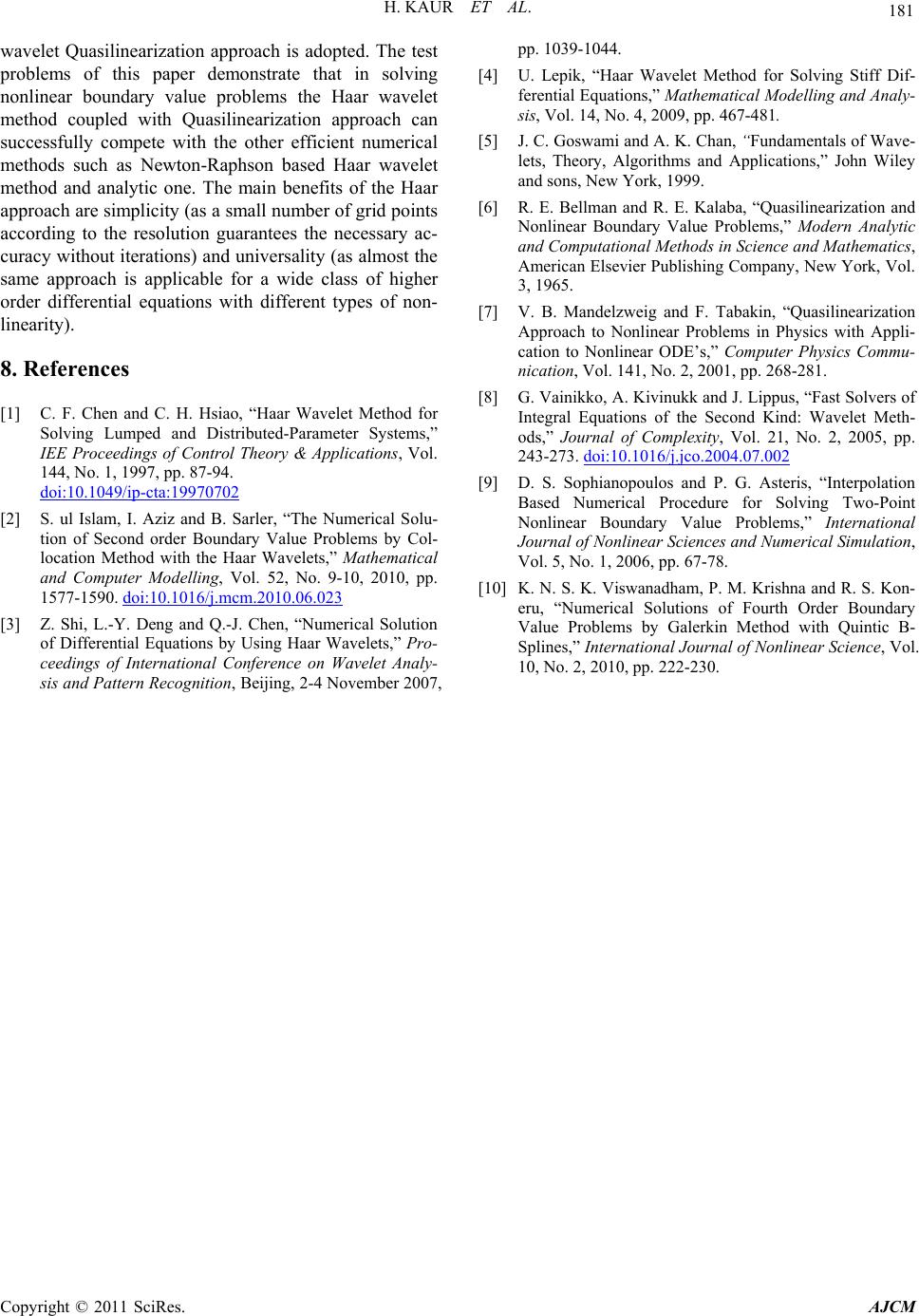 H. KAUR ET AL. Copyright © 2011 SciRes. AJCM 181 wavelet Quasilinearization approach is adopted. The test problems of this paper demonstrate that in solving nonlinear boundary value problems the Haar wavelet method coupled with Quasilinearization approach can successfully compete with the other efficient numerical methods such as Newton-Raphson based Haar wavelet method and analytic one. The main benefits of the Haar approach are simplicity (as a small number of grid points according to the resolution guarantees the necessary ac- curacy without iterations) and universality (as almost the same approach is applicable for a wide class of higher order differential equations with different types of non- linearity). 8. References [1] C. F. Chen and C. H. Hsiao, “Haar Wavelet Method for Solving Lumped and Distributed-Parameter Systems,” IEE Proceedings of Control Theory & Applications, Vol. 144, No. 1, 1997, pp. 87-94. doi:10.1049/ip-cta:19970702 [2] S. ul Islam, I. Aziz and B. Sarler, “The Numerical Solu- tion of Second order Boundary Value Problems by Col- location Method with the Haar Wavelets,” Mathematical and Computer Modelling, Vol. 52, No. 9-10, 2010, pp. 1577-1590. doi:10.1016/j.mcm.2010.06.023 [3] Z. Shi, L.-Y. Deng and Q.-J. Chen, “Numerical Solution of Differential Equations by Using Haar Wavelets,” Pro- ceedings of International Conference on Wavelet Analy- sis and Pattern Recognition, Beijing, 2-4 November 2007, pp. 1039-1044. [4] U. Lepik, “Haar Wavelet Method for Solving Stiff Dif- ferential Equations,” Mathematical Modelling and Analy- sis, Vol. 14, No. 4, 2009, pp. 467-481. [5] J. C. Goswami and A. K. Chan, “Fundamentals of Wave- lets, Theory, Algorithms and Applications,” John Wiley and sons, New York, 1999. [6] R. E. Bellman and R. E. Kalaba, “Quasilinearization and Nonlinear Boundary Value Problems,” Modern Analytic and Computational Methods in Science and Mathematics, American Elsevier Publishing Company, New York, Vol. 3, 1965. [7] V. B. Mandelzweig and F. Tabakin, “Quasilinearization Approach to Nonlinear Problems in Physics with Appli- cation to Nonlinear ODE’s,” Computer Physics Commu- nication, Vol. 141, No. 2, 2001, pp. 268-281. [8] G. Vainikko, A. Kivinukk and J. Lippus, “Fast Solvers of Integral Equations of the Second Kind: Wavelet Meth- ods,” Journal of Complexity, Vol. 21, No. 2, 2005, pp. 243-273. doi:10.1016/j.jco.2004.07.002 [9] D. S. Sophianopoulos and P. G. Asteris, “Interpolation Based Numerical Procedure for Solving Two-Point Nonlinear Boundary Value Problems,” International Journal of Nonlinear Sciences and Numerical Simulation, Vol. 5, No. 1, 2006, pp. 67-78. [10] K. N. S. K. Viswanadham, P. M. Krishna and R. S. Kon- eru, “Numerical Solutions of Fourth Order Boundary Value Problems by Galerkin Method with Quintic B- Splines,” International Journal of Nonlinear Science, Vol. 10, No. 2, 2010, pp. 222-230.  H. KAUR ET AL. Copyright © 2011 SciRes. AJCM 182 Appendix Here we demonstrate the developed C++ program to solve the Haar wavelet based matrix systems for solu- tions of ODEs #include<iostream.h> #include<math.h> #include<conio.h> using namespace std double hfn(double x, double a, double b, double c) { if(x>=a && x<b) return 1; else if(x>=b && x<c) return -1; else return 0; } double hp1(double x, double a, double b, double c) { if(x>=a && x<b) return x-a; else if(x>=b && x<c) return c-x; else return 0; } double hp2(double x, double a, double b, double c) { if(x>=a && x<b) return pow(x-a,2)/2.; } } double fun(double x) { return function } int main( ) { int n, m; double x[64]; int i, j, k, kk; double a, b, c, H[64][64], P1[64][64], P2[64][64], d[64]; cout<<"Enter the value of m"; cin>>m; n=2*m; for (i=0; i<m; i++) { j=2*i+1; x[i]= (j)/n; cout<<"Done here\n"; do { c=1./k; b=(a+c)/2.; { i++; cout<<"Done here\n"; for(j=0;j<m;j++) {H[i][j]=haarfn(x[j],p,q,r); P1[i][j]=haarp1(x[j],p,q,r); P2[i][j]=haarp2(x[j],p,q,r); } }} while(k<m/2); cout<<"Done here\n"; for(i=0; i<m; i++) for(j=0; j<m; j++) A[j][i]=H[i][j]; for(i=0; i<m; i++) for(j=0; j<m; j++) A[j][i]=A[j][i]+L.H.S vector of given problem for(i=0;i<m;i++) d[i]=fun(x[i]); for(i=0;i<m;i++) { for(j=0;j<m;j++) cout<<" "<<A[i][j]; cout<<"\n"; } cout<<"Values of the coefficients d's\n"; for(i=0;i<m;i++) cout<<d[i]<<" "; for(i=0;i<m;i++) { for(j=0;j<m;j++) cout<<" "<<A[i][j]; cout<<"\n"; } for(i=0;i<m;i++) cout<<d[i]<<" "; */ cout<<"\n Enter values of the d solution obtain from MATLAB below"; for(i=0;i<m;i++) cin>>d[i]; cout<<"\n Exact solution is\n"; for(i=0;i<m;i++) cout<<exact(x[i])<<" "; getch(); return 0; }
|