 American Journal of Computational Mathematics, 2011, 1, 147-151 doi:10.4236/ajcm.2011.13016 Published Online September 2011 (http://www.SciRP.org/journal/ajcm) Copyright © 2011 SciRes. AJCM Computing the Moore-Penrose Inverse of a Matrix through Symmetric Rank-One Updates Xuzhou Chen1, Jun Ji2 1Department of Computer Science, Fitchburg State University, Fitchburg, USA 2Department of Mathematics and Statistics, Kennesaw State University, Kennesaw, USA E-mail: xchen@fitchburgstate.edu, jji@kennesaw.edu Received February 22, 2011; revised April 14, 2011; accepted May 12, 2011 Abstract This paper presents a recursive procedure to compute the Moore-Penrose inverse of a matrix A. The method is based on the expression for the Moore-Penrose inverse of rank-one modified matrix. The computational complexity of the method is analyzed and a numerical example is included. A variant of the algorithm with lower computational complexity is also proposed. Both algorithms are tested on randomly generated matri- ces. Numerical performance confirms our theoretic results. Keywords: Finite Recursive Algorithm, Moore-Penrose Inverse, Symmetric Rank-One Update 1. Introduction The computation of the generalized inverse of a matrix has been discussed by numerous papers, from Newton types of iterative schemes to finite algorithms. In par- ticular, the finite recursive algorithms have been investi- gated by several authors [1-4]. Many of these finite algo- rithms are based on the computation of the generalized inverse of the rank-one modified matrix. Our aim is to give a new finite recursive algorithm for computing the Moore-Penrose inverse. The approach is based on the symmetric rank-one updates. The work can be viewed as the generalization of an earlier result on the Moore-Penrose inverse of rank-one modified matrix A + cd* [5, Theorem 3.1.3]. Numerical tests show that our approach is very effective to the computation of Moore-Penrose inverses for rectangular matrices. Throughout this paper we shall use the standard nota- tions in [5,6]. and stand for the n-dimensional complex vector space and the set of m matrices over complex field C respectively. For a matrix n Cmn C n mn AC we denote R(A), N(A), A*, and A† the range, null space, con- jugate transpose and Moore-Penrose generalized inverse of A, respectively. It is well-known that the Moore-Penrose inverse A† of A can be expressed as A† = (A* A)† A*. Thus, we can write † †* 1 m ii i where is the i-th row of A. Define * i r * 0 1 0,,1,2,,, l lii i Arrl m . (2) and †* ,1,2,, ll AA lm (3) Note that 1ll ll * Arr is the rank-one modifica- tion of 1. l In the next section we will propose a finite recursive algorithm which effectively computes Xl in terms of Xl-1 starting from X0 with the help of the existing rank-one update formulas for the Moore-Penrose inverse. After m iterations, m †* m AA will be finally reached, resulting in the Moore-Penrose inverse A† of A due to the fact that † †** * 1 m mm ii i AArr A † ** AA=† Our algorithm will never form Al† explicitly and per- form any matrix multiplications as stated in (3) at each iteration. Thus it has a low computational complexity. The details of its computational complexity will be in- cluded in the paper. To improve its computational com- plexity, a variant is also proposed. A numerical example is presented in Section 4. We also test and compare the efficiencies of Algorithms 1 and 2 by comparing the CPU times on randomly generated matrices of different sizes. * rr A (1)  148 X. Z. CHEN ET AL. 2. The Finite Recursive Algorithm for Moore-Penrose Inverse First, let us establish a relation between † * 1lii rr and † 1l . For each define 1, 2,,,lm † 1, lll kAr * ll hr† 1, l † 11, lll uIAAr l (4) * ll vr † 11 , ll IAA * 1 ll r † 1. ll r Theorem 1. Let Al ( ) and βl be defined as in (2) and (4) respectively. Then βl ≥ 1 for each l. 1, 2,,lm Proof. Obviously, . We now only need to prove the result for * 11 1r 2 † 01 1Ar .lm Observe that Al = is positive semi-definite for 1 Let γ be the rank of 1l * 1 l ii irr .lm . Then 1l is unitarily similar to a diago- nal matrix, i.e., * 1l UDU where U is a unitary matrix and D = diag 12 ,, , with 12 0,, 00. We can write Al-1 † = UD†U* which is also positive semi-definite due to the fact that D† = diag 12 1,1,,1 * ,0, † 11. ll Ar ,0. Therefore, we have βl = 1+rl* □ The general result for the Moore-Penrose inverse of a rank-one modified matrix can be found in [5]. For a ma- trix , , the Moore-Penrose inverse of A + cd* can be expressed in terms of A†, c, and d with six distinguished cases. Our approach is to apply the result to the sequence (3) where each Al is positive semi-definite, βl is real and nonzero in view of Theorem 1 which simplifies the theorem by eliminating three cases. Due to the fact that (Al- 1 †)* = (Al-1 *)† = Al-1 † we also have hl = kl* and vl =ul* from which two of three other cases can be combined into one. Thus, the six cases of [1] are reduced to only two cases. Moreover, the update formulas can be significantly simplified. mn AC , m cCn dC Theorem 2. The Moore-Penrose inverse of Al = Al-1 + rl rl* defined in (2) is as follows. 1) If ul ≠ 0, then † ** 11 † * 11 †† 11 llllll lll lll ll ll rr Arr rrA rr AA uu (5) and † * 1lll rr ††*** 1llllllll kuuku u ††† (6) 2) If ul = 0, then † ** 11 † ** 11 † 11 † 11 llllll lll lll ll ll rr Arr rrA rr AA AA (7) and † * 1lll Arr † 11 lll * l kk (8) Proof. The result follows directly from [5, Theorem 3.1.3] and its proof. Details are omitted. □ Finally, let us turn our attention to establishing the it- erative scheme from Xl−1 to Xl. To this end, we define two auxiliary sequences of vectors ys,t = As†rt and zs,t = Asys,t = As As†rt. It is easily seen from ** * sssssss s AAAAAAA A † ††† * s A† that ys,t and zs,t are the minimum-norm least-squares solu- tions of the following two auxiliary linear systems re- spectively , . ts st yr AzAr In what follows we will frequently employ the fact that a† = a*/||a||2 for any non-zero column vector a. We will distinguish two cases in our analysis in view of Theorem 2. Case 1 (ul ≠ 0). It is easily seen from Theorem 2 that ** 1 1 llll lll lllll XArrA ku Auk AuuA † †† †† (10) Note that 111 * 111 * 11 * 1,1 1 * 1, 1, 1, * 1, 1, 1, lll llll llll l lll ll ll llll ll ll ll lll ll ll lll l ku AArIAArA Arr IAAA rr AAr yrAArA rr z yrz A rr z yArz † †† † †† † † * 1, l ll ll rr z (11) Similarly, we have * 1, 1, *** * 1 ll-l ll ll ll l-,l rz Ay ukArr z † (12) Copyright © 2011 SciRes. AJCM  X. Z. CHEN ET AL. 149 and ** ** * -1, 1, * 12 * -1, ** 1 -1, 1, 2 * -1, 1 1 ll l llll ll lll ll ll lll llllll ll ll uuA rzrzA rA r rr z rA rrzArz rr z †† † † (13) Combining (10) through (13), we have ** -1, -1,1, -1, 1** -1, -1, ** 1, -1, 1, 2 * -1, 1 lll lllll ll ll l llll lll lll lll lll ll ll yArz rzAy XX rr zrr z ry rzArz rrz (14) It is seen from Theorem 2 that * ,1 ** * 1 =. ltltll lt llllllll yArArrr t kuuku ur † † ††† †† Thus, we have an iterative scheme for yl,t: * 1,-1,-1, 1, ,1, ** -1, -1, * 1, * -1, 1, 2 * -1, 1 lllt ltl llllt ltl t ll llll ll lll lllltlt ll ll yrrzrz ry yy rr zrr z ry rzrrz rr z * (15) For the auxiliary sequence zl,t = Al yl,t, we could multi- ply Al on both sides of (15) and then simplify the resulted expression. However, in our derivation we employ (5) instead: ,111, * 11 11 ,* 11 ltlltlll ltltl lt ll llll t l1t llll zAArAAuurzuu r IAA rrIAA r zrIAA r ††† †† † † Therefore, we have * 1, 1, ,-1, * 1, . lllltlt ltl t ll ll rz rrz zz rrz 1 , , l (16) Case 2. (ul = 0). Observe that ** 1 11 llllll rA rry † (17) ** 1, 1,llll ll kk AyAy (18) It is seen from Theorem 2 that ** * 11 1 ll llllll ** 1 1, llll kk A which, together with (17) and (18), implies * 11, * -1, 1. 1 ll llll lll XXy Ay ry -1, (19) By following the same token, we can develop an itera- tive scheme for yl,t: * 1, ,1, 1 * -1, . 1 llt lt ltll lll ry yy y ry , , (20) For zl,t, in view of (7), we have ,1 . ltl t zz (21) Finally, since A0 = 0 we have X0 = 0, y0,t = z0,t = 0 (t = 1, 2, ···, m) from which we can compute the Moore-Pen- rose inverse Xm = A† by applying (14) or (19) repeatedly with the help of auxiliary sequences yl,t and zl,t (t = l + 1, l + 2, ···, m and l < m). We summarize this procedure in the following algorithm. Algorithm 1. MPinverse1[A] ● Step 0 Input: A. Let be the i-th row of A (i = 1, 2, ···, m); * i r ● Step 1 Initialization: Set X0 = 0 Cn × m , y0,t = z0,t = 0 Cn for all t = 1, 2, ···, m; ● Step 2 For l = 1, 2, ···, m, 1) if rl – zl – 1,l ≠ 0, then compute Xl using (14); compute yl,t and zl,t using (15) and (16) respectively for all t = l + 1, l + 2, ···, m and l < m; 2) if rl – zl – 1,l = 0, then compute Xl using (19); compute yl,t and zl,t using (20) and (21) respectively for all t = l + 1, l + 2, ···, m and l < m; ● Step 3 Output: Xm, the Moore-Penrose inverse of A. Let us analyze the two cases in our algorithm further. If ul = 0 for some l, which is the case Step 2(b) in our algorithm, then we have 11 ** 111 1 11 . ll ll lliillilli ii rAArrrAr rArr ††† This means that if ul = 0 for some l, rl is a linear com- bination of {ri: I = 1, 2, ···, l – 1}. The following inter- esting result shows that the opposite is also true. Theorem 3. Let ui and ri (i = 1, 2, ···, m) be defined as before. Then, ul = 0 if and only if rl is a linear combina- tion of {r1, r2, ···, rl – 1}. Proof. The definition of ul = (I – Al–1Al–1 †)rl indicates that ul = 0 is equivalent to rlN(I – Al–1Al–1 †). Let Âl–1 = [r1 |r2| ··· | rl–1]. Obviously, we have Al–1 = Âl–1Âl–1 *. It is easily seen that * ArrAA kkA †† Copyright © 2011 SciRes. AJCM  X. Z. CHEN ET AL. 150 1 1 l † . 1111 ˆˆˆ llll RA RAA RA 1 1 . l ll RA ANIA A † Therefore, ul = 0 is equivalent to rlR(Âl–1), i.e., rl is a linear combination of {r1, r2, ··, rl–1}. □ 3. A Variant of the Finite Recursive Algorithm with an Improved Computational Complexity We now compute the computational complexity of Algo- rithm 1, and then discuss a revised algorithm to improve the efficiencies. Let us focus on the multiplications and divisions ignoring the additions and subtractions. We also count the dominant terms only and ignore the lower terms. Assume that the same quantity is computed only once when the algorithm is implemented. For example, rl*(rl – zl–1,l) in (14) is computed only once and will not be re-computed in (15)-(16). After optimizing the code, it is not difficult to see that 4mn operations are need in (14) and 6n in (15)-(16). In Case 2, 2mn operations are needed in (19) and 2n in (20)-(21). Therefore, the total number of operations T is about 0101 00 4622 4622 ll ll mm utlutl uu Tmnn mnn mnnm lmnnm l Let γ be the rank of A. In view of Theorem 3, there are exactly γ elements in the set {l: 1 ≤ l ≤ m, ul ≠ 0} and (m – γ) elements in its complement set {l: 1 ≤ l ≤ m, ul = 0}. Therefore, we have 0 2 00 2 01 2 0 462 2 2262. 22421 324. l ll l l u uu n ul u Tmn nmlmnmnml mnmnnm lnml mnmnnmlnm mnmnmnnml 0 l u Note that 0 442 412 l u nm lnm lmm nm Therefore, after ignoring lower terms, we obtain 22 3236 2mnmnTmnmnn 2 , (22) which leads to the following theorem. Theorem 4. When applied to the matrix A Cm × n, with roughly T multiplications and divisions where T satisfies (22). In view of T Algorithm 1 computes the Moore-Penrose inverse of A heorem 4, the computational complexity of then apply Algorithm 1 to A, i.e., X = , then apply Algorithm 1 to A. Let Y = Penrose inverse A of A. Step 2 is called, then the computational complexity of . Preliminary Numerical Results e show some numerical results obtained by both algo- s on a small problem w Algorithm 1 grows linearly as a function of n. How- ever, it grows quadratically as a function of m. Thus this algorithm is very fast for small m and much slower for large m. Our preliminary numerical tests confirm the theoretical discovery. Due to the fact that (A*)† = (A†)*, let us apply Algorithm 1 to A* when m is bigger than n. If the output of Algorithm 1 on A* is Y, i.e., Y = MPin- verse1[A*], then we have Y = (A*)† so A† = Y *. We end up this section with the following algorithm for A†. Algorithm 2. MPinversel[A] ● Step 0 Input: A; ● Step 1 If m ≤ n, MPinverse1[A]; ● Step 2 If m ≥ n* MPinverse1[A*] and set X = Y*; ● Step 3 Output: X, the Moore-† If Algorithm 2 is bounded by 3mn2 + 6γmn – 2γ2m in view of Theorem 4 since the roles of m and n are switched. Therefore, the complexity of Algorithm 2 is bounded by K where K = 3m2n + 6γmn – 2γ2n if m ≤ n and K = 3mn2 + 6γmn – 2γ2m if m > n. 4 W rithms proposed in the previous sections. One major ad- vantage of our algorithms is that they will be guaranteed to carry out a result successfully. We first illustrate our algorithm ith accurate calculation at each step. Example 1. Let 123 456 A (23) By using either one of our algorithms, we generate a sequence of matrices 01 2 001148 49 00,1 71649, 003 142449 17 1849 19 19 13 1829 XX X (24) where X2 = A† which is the Moore-Penrose inverse of A. at Now, we perform our algorithms on randomly gener- ed matrices using a MATLAB implementation of Al- Copyright © 2011 SciRes. AJCM 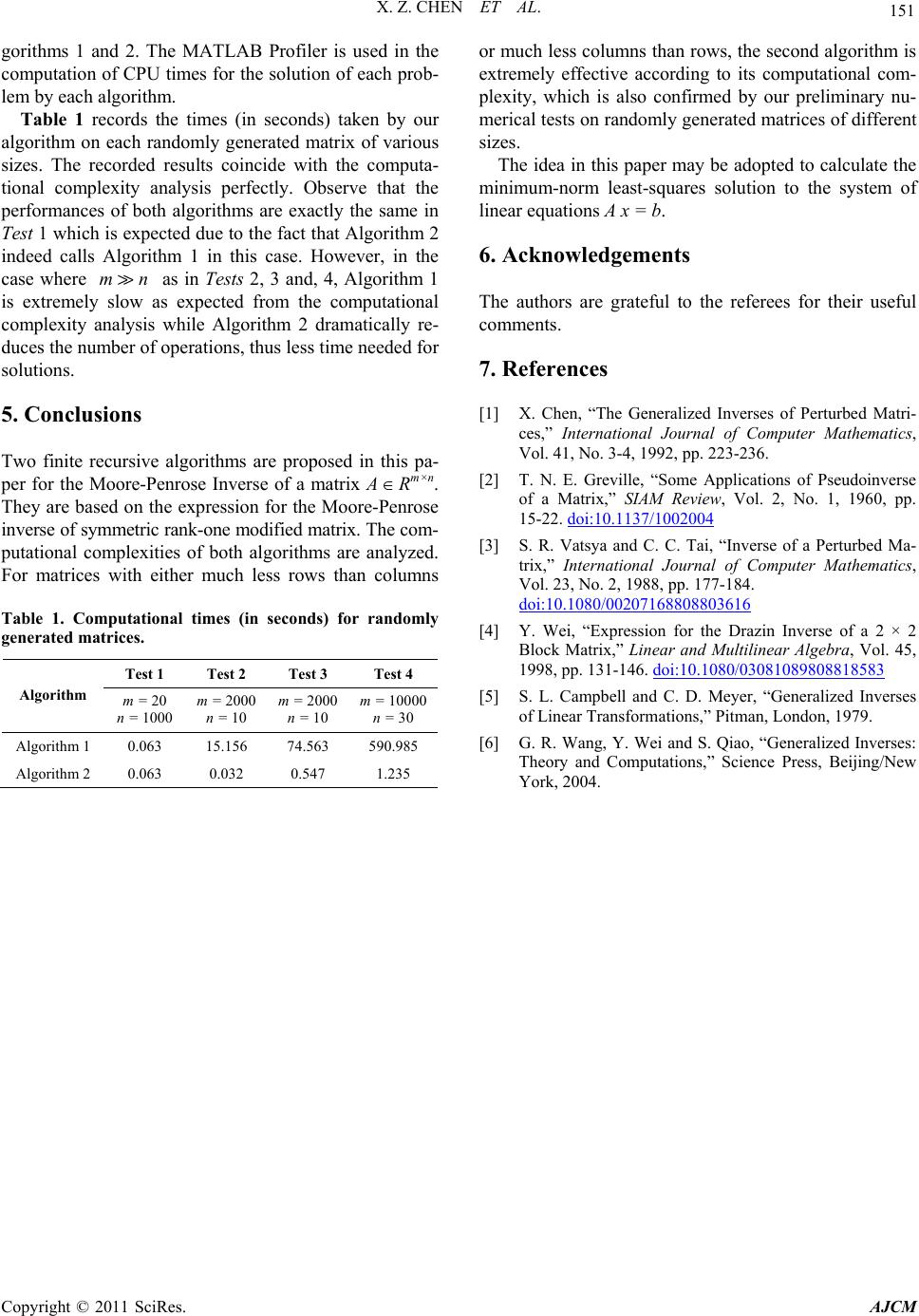 X. Z. CHEN ET AL. Copyright © 2011 SciRes. AJCM 151 times (in seconds) taken by our al . Conclusions wo finite recursive algorithms are proposed in this pa- gorithms 1 and 2. The MATLAB Profiler is used in the computation of CPU times for the solution of each prob- lem by each algorithm. Table 1 records the or much less columns than rows, the second algorithm is extremely effective according to its computational com- plexity, which is also confirmed by our preliminary nu- merical tests on randomly generated matrices of different sizes. gorithm on each randomly generated matrix of various sizes. The recorded results coincide with the computa- tional complexity analysis perfectly. Observe that the performances of both algorithms are exactly the same in Test 1 which is expected due to the fact that Algorithm 2 indeed calls Algorithm 1 in this case. However, in the case where mn as in Tests 2, 3 and, 4, Algorithm 1 is extremely slow as expected from the computational complexity analysis while Algorithm 2 dramatically re- duces the number of operations, thus less time needed for solutions. The idea in this paper may be adopted to calculate the minimum-norm least-squares solution to the system of linear equations A x = b. 6. Acknowledgements The authors are grateful to the referees for their useful comments. 7. References 5[1] X. Chen, “The Generalized Inverses of Perturbed Matri- ces,” International Journal of Computer Mathematics, Vol. 41, No. 3-4, 1992, pp. 223-236. T [2] T. N. E. Greville, “Some Applications of Pseudoinverse of a Matrix,” SIAM Review, Vol. 2, No. 1, 1960, pp. 15-22. doi:10.1137/1002004 per for the Moore-Penrose Inverse of a matrix A Rm×n. They are based on the expression for the Moore-Penrose inverse of symmetric rank-one modified matrix. The com- putational complexities of both algorithms are analyzed. For matrices with either much less rows than columns [3] S. R. Vatsya and C. C. Tai, “Inverse of a Perturbed Ma- trix,” International Journal of Computer Mathematics, Vol. 23, No. 2, 1988, pp. 177-184. doi:10.1080/00207168808803616 Table 1. Computational times (in seconds) for rand Test 2 Test 3 Test 4 omly [4] Y. Wei, “Expression for the Drazin Inverse of a 2 × 2 Block Matrix,” Linear and Multilinear Algebra, Vol. 45, 1998, pp. 131-146. doi:10.1080/03081089808818583 generated matrices. Test 1 [5] S. L. Campbell and C. D. Meyer, “Generalized Inverses of Linear Transformations,” Pitman, London, 1979. Algorithm m m m m = 20 n = 1000 = 2000 n = 10 = 2000 n = 10 = 10000 n = 30 [6] G. R. Wang, Y. Wei and S. Qiao, “Generalized Inverses: Theory and Computations,” Science Press, Beijing/New York, 2004. Algorithm 1 0.063 15.156 74.563 590.985 Algorithm 2 0.063 0.032 0.547 1.235
|