 Journal of Signal and Information Processing, 2011, 2, 152-158 doi:10.4236/jsip.2011.23019 Published Online August 2011 (http://www.SciRP.org/journal/jsip) Copyright © 2011 SciRes. JSIP RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems Seiichi Nakamori1, Raquel Caballero-Águila2, Aurora Hermoso-Carazo3, Josefa Linares-Pérez3 1Department of Technical Education, Kagoshima University, Kagoshima, Japan; 2Departamento de Estadística e I.O, Universidad de Jaén, Paraje Las Lagunillas, Jaén, Spain; 3Departamento de Estadística e I.O, Universidad de Granada, Campus Fuentenueva S/N, Granada, Spain. Email: nakamori@edu.kagoshima-u.ac.jp, raguila@ujaen.es, {ahermoso, jlinares}@ugr.es Received June 27th, 2011; revised July 29th, 2011; accepted August 8th, 2011. ABSTRACT This paper proposes recursive least-squares (RLS) l-step ahead predictor and filtering algorithms with uncertain ob- servations in linear discrete-time stochastic systems. The observation equation is given by kkzkv k , , where is a binary switching sequence with cond itional probability. The estimators req uire the information of the system state-transition matrix zk Hxk k , the observation matrix , the variance , kk of the state vector k, the varia nce Rk of the observation noise, the probability 1pk Pk that the signal exists in the uncertain observation equation and the 2, 2 element 2, |Pk j2 of the conditional probability of k , given . j Keywords: Estimation Theory, Synthe sis of Stochastic Sy stems, RLS Wiener Predic tor, Uncertain Observations, Markov Probability 1. Introduction The estimation problem given uncertain observations is an important research topic in the area of detection and estimation problems in communication systems [1]. Nahi [2], assuming that the state-space model is given, pro- poses the RLS estimation method with uncertain obser- vations, when the uncertainty is modeled in terms of in- dependent random variables, and the probability that the signal exists in each observation is available. The term uncertain observations refers to the fact that some obser- vations may not contain the signal and consist only of observation noise. In Hadidi and Schwartz [3], Nahi’s results are extended to the case where the variables mod- eling the uncertainty are not necessarily independent. In the above studies, it is assumed that the state-space model for the signal is given. However, in real applica- tions, the state-space modeling errors might degrade the estimation accuracy. Nakamori [4] derived the RLS Wiener fixed-point smoothing and filtering algorithms, based on the invariant imbedding method, from uncertain observations with uncertainty modeled by independent random variables. In the derivation of such RLS Wiener estimators, the state-transition matrix Φ, the observation matrix , the variance , kk of the state vector k, the variance Rk of the observation noise vk and the observed values k are used. More- over, Nakamori et al. [5], based on the innovation ap- proach, proposed the RLS Wiener fixed-point smoother and filter in linear discrete-time stochastic systems. Here, the observation equation is given by kkzkv k zk Hxk, ,where k is a binary switching sequence with conditional probabil- ity. The innovation process is given by ˆ,1,sysyss 2,2 ˆˆ ,1 1sPsH xs ,1ys s in terms of the element ,2 of the conditional probability of , given (2,2) 2 |Pk j () j k (see Na- kamori et al. [5,6] for details). In the current paper, under the same assumptions for the observation equation as in Nakamori et al. [5], an algorithm for the RLS Wiener ahead predictor is derived, based on the invariant imbedding method. Thus, the observation equation is given by stepl 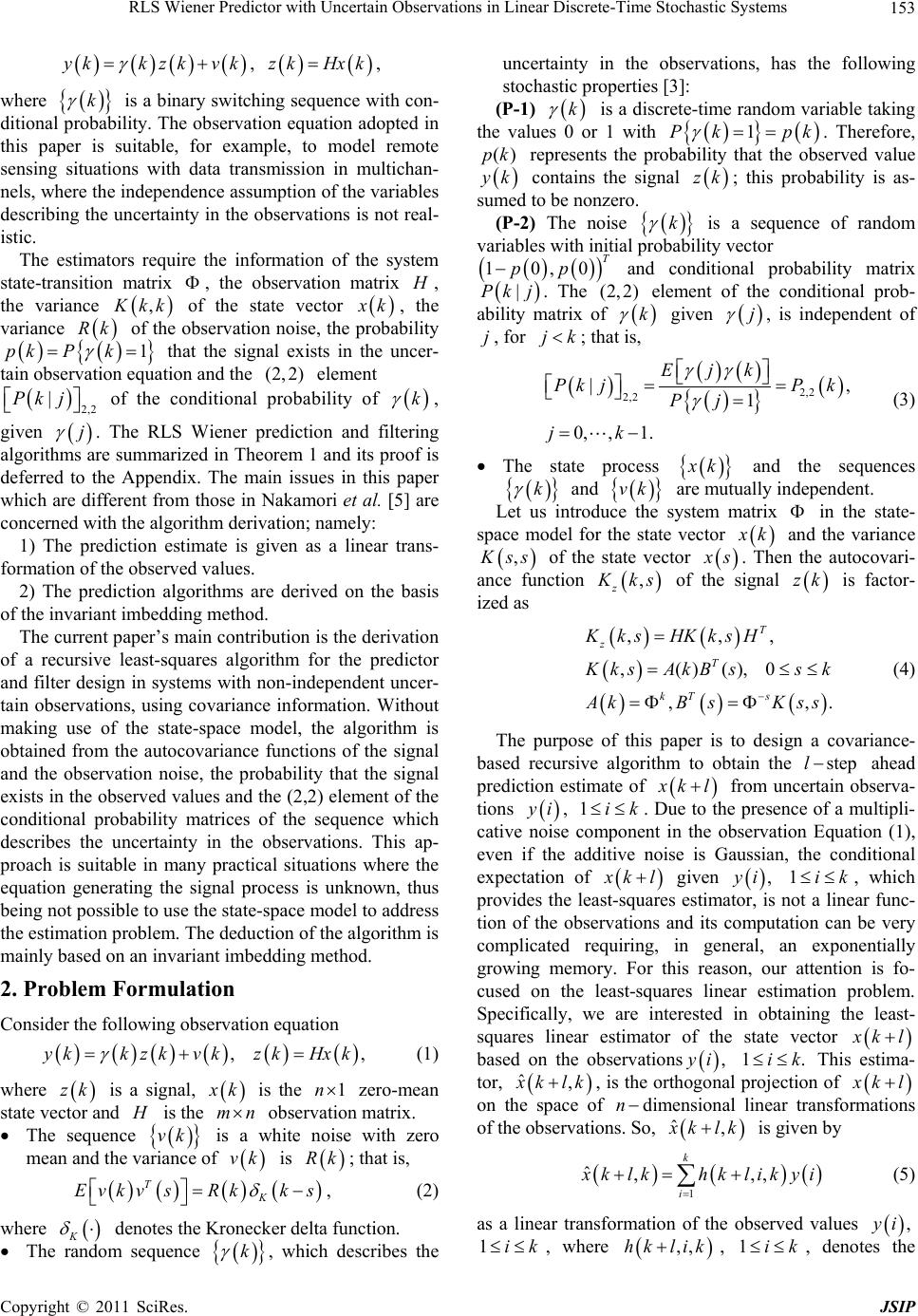 RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems153 kkzkvk , , zk Hxk where is a binary switching sequence with con- ditional probability. The observation equation adopted in this paper is suitable, for example, to model remote sensing situations with data transmission in multichan- nels, where the independence assumption of the variables describing the uncertainty in the observations is not real- istic. k The estimators require the information of the system state-transition matrix , the observation matrix , the variance , kk of the state vector k, the variance of the observation noise, the probability that the signal exists in the uncer- tain observation equation and the element Rk P 1k pk (2,2) 2,2 |Pk j of the conditional probability of k , given j . The RLS Wiener prediction and filtering algorithms are summarized in Theorem 1 and its proof is deferred to the Appendix. The main issues in this paper which are different from those in Nakamori et al. [5] are concerned with the algorithm derivation; namely: 1) The prediction estimate is given as a linear trans- formation of the observed values. 2) The prediction algorithms are derived on the basis of the invariant imbedding method. The current paper’s main contribution is the derivation of a recursive least-squares algorithm for the predictor and filter design in systems with non-independent uncer- tain observations, using covariance information. Without making use of the state-space model, the algorithm is obtained from the autocovariance functions of the signal and the observation noise, the probability that the signal exists in the observed values and the (2,2) element of the conditional probability matrices of the sequence which describes the uncertainty in the observations. This ap- proach is suitable in many practical situations where the equation generating the signal process is unknown, thus being not possible to use the state-space model to address the estimation problem. The deduction of the algorithm is mainly based on an invariant imbedding method. 2. Problem Formulation Consider the following observation equation ,, kkzk vkzkHxk (1) where is a signal, zk k is the zero-mean state vector and 1n is the mn observation matrix. The sequence vk is a white noise with zero mean and the variance of vk is Rk; that is, K EvkvsRkks T , (2) where denotes the Kronecker delta function. K The random sequence k , which describes the uncertainty in the observations, has the following stochastic properties [3]: (P-1) k is a discrete-time random variable taking the values 0 or 1 with 1 kp k. Therefore, represents the probability that the observed value ()pk k contains the signal ; this probability is as- sumed to be nonzero. zk (P-2) The noise k is a sequence of random variables with initial probability vector and conditional probability matrix 10,0 T pp |Pk j(2,. The element of the conditional prob- ability matrix of 2) k given j , is independent of , for jjk ; that is, 2,2 2,2 |, 1 0, ,1. Ejk Pk jPk Pj jk (3) The state process k and the sequences k and vk are mutually independent. Let us introduce the system matrix in the state- space model for the state vector k and the variance , ss of the state vector s. Then the autocovari- ance function , z ks of the signal is factor- ized as zk ,,, ,()(),0 ,, T z T kT s Kks HKksH . ksAkB ssk kBsKs s (4) The purpose of this paper is to design a covariance- based recursive algorithm to obtain the ahead prediction estimate of stepl kl from uncertain observa- tions i, 1ik . Due to the presence of a multipli- cative noise component in the observation Equation (1), even if the additive noise is Gaussian, the conditional expectation of kl given , i , which provides the least-squares estimator, is not a linear func- tion of the observations and its computation can be very complicated requiring, in general, an exponentially growing memory. For this reason, our attention is fo- cused on the least-squares linear estimation problem. Specifically, we are interested in obtaining the least- squares linear estimator of the state vector 1ik kl based on the observations , i This estima- tor, 1i.k ˆ, klk , is the orthogonal projection of kl on the space of n dimensional linear transformations of the observations. So, ˆ, klk is given by 1 ˆ,,, k i klkhklikyi (5) as a linear transformation of the observed values , i 1ik , where ,,hklik, , denotes the 1ik Copyright © 2011 SciRes. JSIP  RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems 154 impulse-response function. Let us consider the least-squares prediction problem, which minimizes the criterion ˆˆ ,, T JExklxk lkxk lxk lk . (6) The orthogonal projection lemma [7] assures that , klk is the only linear combination of the obser- vations i, such that the estimation error is orthogonal to them, 1ik ˆ,, 1, kl xklkyssk (7) that is, 1 ,,0, 1. kT i Exk lhklikyiys sk This condition is equivalent to the Wiener–Hopf equa- tion 1 ,,, 1, k TT i Exk lyshklikEyiys sk (8) useful to determine the optimum impulse-response func- tion ,,hklik, , which minimizes the cost function (6). From , the left-hand side of (7) is written as 1ik Pk 1pk , TT Exk lysKklsHps . (9) Let E denote the statistical expectation with re- spect to vk . Then, from the observation equation (1) and the covariance function (2) for white observation noise , is reduced to T Eyiy s T , . T K EyiysEis HKisH Rii s (10) Substituting (9) and (10) into (8), we have 1 ,, , ,,, . T kT i hk lskRsKk lsHps hklikEisHK is H (11) Under these conditions, in Section 3 the RLS Wiener prediction and filtering algorithms are presented. 3. RLS Wiener Prediction and Filtering Algorithm Nakamori et al. [5,6], based on the innovation approach, proposed the algorithms for the fixed-point smoothing estimate and the filtering estimate. These algorithms are derived taking into account that the innovation process is expressed as 2,2 ˆ,1, ˆˆ ,1 1,1 sysyss yssPsH xss . Under the preliminary assumptions made in Section 2, Theorem 1 proposes the RLS Wiener algorithms for the stepl ahead prediction estimates of the signal zk l and the state vector kl. These algo- rithms are derived, starting with (11), by iterative use of the invariant imbedding method. Theorem 1. Consider the observation equation de- scribed in (1) and assume that the probability pk and the element (2,2) 2,2 Pk of the conditional probabil- ity matrix , |Pk j are given. Let the system state- transition matrix the observation matrix , the autovariance function , ss of the state vector s, the variance Rk of the white observation noise vk and the observed value k l be given. Then the RLS Wiener algorithms for the ahead predic- tion estimate step , lk ˆ zk of the signal and the zk l l step ahead prediction estimate , ˆ klk of the state vector kl consist of (12)-(17). l step ahead prediction estimate of the signal ˆ :,lzk lkzk ˆ ˆ,zk lkHxk lk , (12) l step ahead prediction estimate of the state vector ˆ :, klxklk 2,2 ˆˆ ,1,1 ˆ ,,1,1, ˆ,0 0 l xk lkxk lk hkkkykPkH xkk xl (13) Filtering estimate of ˆ :,zk zkk ˆ ˆ,zkk Hxkk , (14) Filtering estimate of ˆ :, kxkk 2,2 ˆˆ ,1,1 ˆ ,,1,1, ˆ0,00 xkkxk k hkkkykPkHxkk x (15) Filter gain: ,,hkkk 2,2 1 2 2,2 ,, , 1 , 1 T TT T TT hkkkKkkH pk PkSk H Rk pkHKkkH PkHSk H (16) Copyright © 2011 SciRes. JSIP  RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems155 2,2 1,, ,1 00 T T Sk Skhkkk HKkkpkPkHSk S , (17) Proof of Theorem 1 is detailed in the Appendix. Clearly, the algorithms for the filtering estimate are the same as those proposed in Nakamori et al. [5]. From Theorem 1, the innovation process k is represented by 2,2 ˆ1,1 .kykPkHxkk (18) 4. A Numerical Simulation Example In order to illustrate the application of the RLS Wiener prediction algorithm proposed in Theorem 1, we consider a scalar signal zk whose autocovariance function z m is given as follows [8] 2 22 1212 121 2 2122121 0, 11 11 0, z m z m K Km m , (19) with 2 12112 ,4aaa 2, where and 1 2 0.1,a 0.8a0.5. The covariance function (19) corresponds to a signal process generated by a second-order AR model. There- fore, according to Nakamori [4], the observation vector , the variance of the state vector ,Kkk K 0 k and the system matrix in the state equation are as follows: 21 01 10, ,, 10 01 ,00.25,1 0.125. zz zz zz KK HKkk KK KK aa (20) As in Nakamori et al. [5], we consider that the signal is transmitted through one of two channels, char- acterized by its observation equation as follows: zk Channel 1: , kzkvk Channel 2: , kUkzkvk where is a zero-mean white observation noise and is a sequence of independent random variables taking values or 1 with vk Uk 0 1PU kp 0.8 .7 is described by , for all . k We assume that channel 1 is chosen at random with probability and, hence, channel 2 is selected with probability . Then, the observation equation 10q 0.3q , kkzkvk (21) where 11k Uk and is a random variable, independent of , taki values 0 or 1 with Uk ng 10.3Pq . C k is a sequence of randh take valu 1 with learly om variables whic , es 0 or 1pk Pk 1, 1 0 10.94 PU k P pq q for all , and conditional probability matrix k 2 1pp |11 1 11 11 0.2 0.8 , 0.0510638 0.9489362 Pk jqp qp p qpqp for all . ,0,,1kj k (3), From 2,2 2,2 | 0.9489362,Pk jPk 1. for all ,0,,j kk , , kk gorithm Substituting and , given by in (20), to the predictof Theom 1, the predict- tion estimate of the signal has been calculated recur- sively. Figure 1 illustrates the signal zk and its prediction es ion alre timate ˆ3,zkk for zero-mhite observation noise with2 0.3. Figure 2 illustrates the mean- square values (MSVf the filtering and prediction er- rors for zero-mean white observation noises with vari- ances 2 0.1, 2 0.3 , 2 0.5 and 2 0.7 , comparing both the uncertandservatihe latter cor- ean w ns cases (t variance s a certain ) o obino () k Figure 1. Signal and its prediction estimate ˆ,(3)zk k for the zero-mean white observation noise with 2 the variance 0.3. Copyright © 2011 SciRes. JSIP  RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems Copyright © 2011 SciRes. JSIP 156 responds redated by to the case 2,2 1pkP k). The MSVs of the filtering and p observation Equation (1), the RLS Wiener algorithms for the l step ahead prediction estimates of the signal ˆ, zk lk zk l and ˆ, iction errors are evalu klk of the state vector kl are derived by iterative use of the invariant imbedding method. The prediction algorithms take into account the stochastic properties of the random variables k in the observation Equation (1) such as the probability 1kpk P that the signal exists in the uncertain observation equation, and the (2,2) 2000 2 ˆ,2000,1,2, ,5.zizi lil 1i Here, corresponds to the calculation f the MSVs of the filtering errors. igur ns for both the uncer- ta s process in the simulations, is give 5. Conclusions y assumptions of Section 2, for 0lo From F e 2, it is deduced that, as l becomes lar- ger, the prediction accuracy worse in and the certain observations cases, with each differ- ent observation noise. It might also be noticed that the MSVs with uncertain observations are almost equal to those with certain observations except for the observation noise with variance 2 0.1 . For the observation noise with variance 2 0.1 , the MSVs of the prediction errors with the certain observatiare smaller than those with the uncertain ob ervations, particularly for the 2 and 4-step ahead predictions. For reference, the autoregressive (AR) model used to generate the signal ons element 2,2 Pkj of the conditional probability of k , given j . A numerical simulation example in Section 4 shows that the prediction algorithm proposed in this paper is feasible. REFERENCES n by 12 111,zkazk azkwk (22) [1] H. L. Van Trees, “Detection, Estimation and Modulation Theory (Part I),” Wiley, New York, 1968. [2] N. Nahi, “Optimal Recursive Estimation with Uncertain Observation,” IEEE Transactions on Information Theory, Vol. IT-15, No. 4, 1969, pp. 457-462. doi:10.1109/TIT.1969.1054329 2. K Ewkwsk s [3] N. Hadidi and S. Schwartz, “Linear Recursive State Es- timators under Uncertain Observations,” IEEE Transac- tions on Automatic Control, Vol. AC-24, No. 6, 1979, pp. 944-948. doi:10.1109/TAC.1979.1102171 Under the preliminar the [4] S. Nakamori, “Estimation Technique Using Covariance Information in Linear Discrete-Time Systems,” Signal Processing, Vol. 58, No. 3, 1997, pp. 309-317. doi:10.1016/S0165-1684(97)00032-7 [5] S. Nakamori, R. Caballero-Águila, A. Hermoso-Carazo and J. Linares-Pérez, “Linear Recursive Discrete-Time Estimators Using Covariance Information under Uncertain Observations,” Signal Processing, Vol. 83, No. 7, 2003, pp. 1553-1559. doi:10.1016/S0165-1684(03)00056-2 [6] S. Nakamori, R. Caballero-Águila, A. Hermoso-Carazo and J. Linares-Pérez, “Fixed-Point Smoothing with Non- Independent Uncertainty Using Covariance Information,” International Journal of Systems Science, Vol. 34, No. 7, 2003, pp. 439-452. doi:10.1080/00207720310001636390 [7] A. P. Sage and J. L. Melsa, “Estimation Theory with Ap- plications to Communications and Control,” McGraw-Hill, New York, 1971. Figure 2. Mean-square values (MSVs) of the filtering and prediction errors for the zero-mean white observatio n [8] S. Haykin, “Adaptive Filter Theory,” Prentice-Hall, New Jersey, 2003. noises with the variances 0.12, 0.32, 0.52 and 0.72 for both the uncertain and certain observations.  RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems157 et us introduce the equation concerned with the function Appendix A. Proof of Theorem 1 L , ks as ,TT JksRspsB sH 1 ,( ) , kT i . kiEisHK isH (A-1) From (11) and (A-1) it follows that (A-2) putting in (A-1) from (A-1) yields , ,,, .hk lskAk lJks Subtracting the equation obtained by 1kk ,1, , JksJksRs 1 1 ,1 , ,. T k i T kk EksHK ksH Jk i Jki EisHKisH (A-3) From (A-1), (A-3) and the relationship , it follows that 2,2 EksPkps ,1, 1,, Jks Jks 2,2 , 1. kkPkHA sk kJk s (A-4) Putting k in (A-1) yields 1 1 1 1 2,2 1 2,2 (,) ,, (,), ,, ,, 1, ,1, . TT T i TT T kT i TT T k i TT JkkRkpkB kH JkiEikHKikH pkB kH JkkEkk HKkkH JkiEikHKikH pk Bk HpkJ kk HK kk H k kiJkkPkHAkJki piPkHBiA kH (A-5) Here, the relationship Ekkpk , (4) and (A-4) are used. Let us introduce a function Hence, 1 k i rk J (A-6) ,kipiHBi. 2,2 1 2 2,2 , 1 , 1. TT TT T T Jkk pkBkHrkA kHPk Rk pkHKkkH PkHAkrk Ak (A-7) Subtracting the equation obtained by putting in (A-6) from (A-6) yields 1kk 1 1 1 2,2 1, ,1, , ,1 ,1 k i i rk rkJkkpkHBk JkiJki piHBi JkkpkHBk 1 2,2 , k . kk piHBi JkkpkHBkPkHAkrk Pk HAkJ ki (A-8) Here, (A-5) and (A-7) have been used. Clearly, from (A-6), the initial condition for the recursive Eq (A-8) of uation rk at 0k is given by The 00r. ahiction estiead predmate l step ˆ, klk of kl is given by (5). From (5) and (Aws -2), it follo that 1 ˆ,,. i k klk AklJkiyi (A-9) Let us uce ation introd func Hence, the 1 , k i ek Jkiyi . (A-10) l step ahead prediction estimate ˆ, klk of the state vector kl and the filtering estimate , ˆ kk of the state vector k are given by ˆˆ ,, , klkAklekxkkAkek. (A-11) Subtracting the equation obtained by in (A-10) from (A-10) yields putting 1kk 1 1 . k ek 1 ,, 1, i ek kkykJkiJ kiyi (A-12) From (A-4) and (A-10), we get 1,ek Jkkyk 1 2,2 1 2,2 ,1 ,( k i ek , 1. kk Pk HAkJ kiyi JkkykPkHAkek (A-13) ws that From (A-2), (A-11) and (A-13), it follo Copyright © 2011 SciRes. JSIP  RLS Wiener Predictor with Uncertain Observations in Linear Discrete-Time Stochastic Systems 158 2,2 ˆˆ ,1,1 ˆ ,,1,1, ˆ0,00, ˆˆ ,1,1 ˆ,0 0. xkkxk k hkkkykPkHxkk x xk lkxk lk xl 2,2 ˆ ,, 1,1, lhkkkykPkHxkk (A-14) Introducing , T SkAkrkA k it follows, from (A-8) and (A-15), that (A-15) 2,2 2,2 (1) (,) 1 (1) ,, ,1 00. T T T T SkAkrkA kAkJkk pkHBkPkHAkrkA k Sk hkkk pkHKkkPkH Sk S Finally, the filter gain ,, ,hkkk AkJkk is expressed as follows 2,2 1 2 2,2 ,, ,1 (),1 . TT TT hkkkpkKkkHPkSkH Rkpk HK kk HPk HSk T (Q.E.D.) Copyright © 2011 SciRes. JSIP
|