International Journal of Modern Nonlinear Theory and Application
Vol.3 No.3(2014), Article
ID:48264,12
pages
DOI:10.4236/ijmnta.2014.33014
Validity of Approach to Maximize the ASR of the Order Superiorly Two in Discrete Nonlinear Systems
Samia Charfeddine, Lassaad Sbita
College of Engineering/Electrical Engineering, Unit of Photovoltaic, Wind and Geothermal Systems, ENIG, Gabés, Tunisia
Email: samia.charfedine@yahoo.fr, Lassaad.sbita@enig.rnu.tn
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

![]()

Received 24 May 2014; revised 25 June 2014; accepted 3 July 2014
ABSTRACT
This paper is, in fact, a proposal of a polynomial approach to the nonlinear systems control by using the concept of linearization by state feedback. In this context, a discretization method is presented. We developed a discrete control scheme based on an approximate feedback linearization method and the reversing trajectory method. The proposed control strategy sits on the methods of widening the stability domains of operating points. Such domains are expanded through the use of the non Lyapunov stability synthesis methods. Additionally, the developed technique is employed for the control of the class of systems with an order higher than two; more precisely, the example of a synchronous generator featured in a strongly nonlinear model.
Keywords:Discrete-Time Systems, Reverse Trajectory Method, Nonlinear Polynomial Systems, Asymptotic Stability Region (ASR), Synchronous Generateur

1. Introduction
It is widely believed that in the field of automation, several constraints of physical nature have an effect on the dynamic behavior of non-linear systems. Consequently, the study of a system-dynamics comprises a preliminary and important phase so that we can find out about the strategy of a powerful and reliable order. Obviously, the study and analysis of the stability of dynamic systems involves an essential stage for any resourceful study. Thus, the concept of asymptotic stability of autonomous continuous systems is elaborated today. In 19th century, this notion came into existence with the theory of Lyapunov in an attempt to create an interest-center to a huge number of research-works and research-works; in this, the theory of Zubov [1] -[3] is a case in point. Such a theory, in fact, provides a common scope for study of all the nonlinear autonomous continuous systems. Hence, the two following issues are regarded as major problems:
• The analysis of the stability of nonlinear dynamic systems.
• The estimate of a relatively exact region of the state-space ensuring the stability of nonlinear-system variables.
When we are inclined to the study of stability in continuous time, we can perceive the richness of the literature which is teeming with results, methods and approaches dealing with these themes [4] -[6] .
Nevertheless, when dealing with the problems of analysis and stability of the discrete autonomous nonlinear systems, we note that a few works address such problems [7] -[10] .
In this, this article is aimed to study the stability and to determine a field of stability of the discrete autonomous nonlinear dynamic systems.
We also realize that most of the studies dealing with this subject are based on the Lyapunov theory. We insist on the fact that, for a nonlinear system, the determination of an asymptotic stability region around an equilibrium point is generally a hard task. Again, we are appealed to the synthesis of a numerical technique so as to analyze the asymptotic stability in the neighborhood of the discrete systems stable equilibrium points.
This approach is developed in other works [11] -[13] . Its principle aims at executing in the opposite directions of the iterations described by the recurring polynomial state equation. Such equation represents the dynamics of the studied autonomous discrete nonlinear systems. The reverse discrete system, then, will be characterized by the same samples belonging to the closed curves in the state space and which represent the same dynamics of the initial system. But its discrete direction of evolution is quite the reverse. Consequently, the origin becomes unstable and the speed of the closed curves connecting the discrete points initialized in an asymptotic stability field is reduced. This, in fact, allows identifying a broader stability region.
Indeed, the reverse trajectory method paves us the way to reach the exact field of asymptotic stability of the nonlinear discrete systems of order 2. Nevertheless, it is applied to the systems of an order equal to or higher than 3 in orders to widen the initial field of stability without reaching the exact field of stability.
This paper is organized as follows: in the first section.
2. The Discretization Method
The method of studying a discrete process looks like a transposition of the methods which are initially developed for the continuous systems. This actually pushes us to study the analogy between the continuous and discrete process which paves us the way to use the numerical and analogue methods by control and simulation.
In this part, we are inclined to the determination of a discrete model of the continuous systems.
Initially, we consider the continuous model defined by the following equation:
![]() (1)
(1)
We employ the continuous model of order three which is defined by:
 (2)
(2)
By considering a discretization period T, which is properly selected and by adopting the following approximations in an interval :
:
Let us consider, then, the following discretization method [14] [15] :
 (3)
(3)
By including Equation (3) in Equation (2), here comes the discrete model given by:
 (4)
(4)
where
3. Linearizing Polynomial Control of the Discrete Nonlinear Systems
3.1. Description of the Studied Discrete Nonlinear Systems
The concept of the discrete NLGS approach is derived from the same methodology as the continuous NLGS one. In addition, we discredited the continuous model so as to simplify the analysis and to facilitate the task of associated calculation [16] . The discretization of continuous systems is particularly significant today as the current technology requires the implementation of discrete controls [17] .
The studied discrete nonlinear systems are defined by the state equations of the form [18] [19] :
![]() (5)
(5)
where  is the state vector
is the state vector![]() ,
,  is the control vector
is the control vector , the functions
, the functions ![]() and
and ![]() are assumed to be analytical.
are assumed to be analytical.
Let us consider the following variable change![]() , where the operating point state vector is
, where the operating point state vector is  and
and  is the corresponding control input. Using the development into generalized Taylor series expansions and the kronecker tensorial product given by:
is the corresponding control input. Using the development into generalized Taylor series expansions and the kronecker tensorial product given by:
 (6)
(6)
3.2. The Suggested Approach to the Control
3.2.1. Formulation of the Problem of Linearizing Control
Let us consider the discrete nonlinear system (1) and consider an arbitrary linear system of order n described by the following state equation [7] -[20] :
 (7)
(7)
It is a question of determining, when there exists, a nonlinear feedback of the form:
![]() (8)
(8)
Here is a nonlinear analytical transformation described by the following equation:
![]() (9)
(9)
Such that (5) is transformed into the linear system (7).
3.2.2. The Control Determination
By using the polynomial development of the functions ![]() and
and![]() , the relations (8) and (9) are written as:
, the relations (8) and (9) are written as:
 (10)
(10)
where  is the redundant power.
is the redundant power.
The control vector  and the state analytic transformation are defined by the matrices
and the state analytic transformation are defined by the matrices  and
and .
.
By replacing the functions ![]() and
and ![]() with the developments (6) in the state Equation (5), we can get:
with the developments (6) in the state Equation (5), we can get:
 (11)
(11)
After replacing the control vector  with the development (10), Equation (11) becomes:
with the development (10), Equation (11) becomes:
 (12)
(12)
Such equation can be stated in this form:
 (13)
(13)
where 
The vector defined in Equation (9) verified:
 (14)
(14)
and for 
 (15)
(15)
where
 (16)
(16)
In particular, we have
 (17)
(17)
and
 (18)
(18)
The expression (14) truncated to the r order:
Using the polynomial development functions  and
and , the relations (7) and (10) are written as:
, the relations (7) and (10) are written as:
 (19)
(19)
other
 (20)
(20)
By replacing  which is defined by System (7) in Equation (10), we obtain the form:
which is defined by System (7) in Equation (10), we obtain the form:
 (21)
(21)
where ![]() is a redundant matrix.
is a redundant matrix.
The identification of the relations (20) and (21) leads to the following recurring equations:
 (22)
(22)
The choice of the matrix  such as
such as  implies:
implies:
![]() (23)
(23)
when the function  is introduced into the Sylvester Equation, it comes [21] :
is introduced into the Sylvester Equation, it comes [21] :
![]() (24)
(24)
where
A necessary condition of existence of the matrix  and the matrix
and the matrix  itself is a full row. When this condition is satisfied, the relation (24) leads to what may be said as satisfied:
itself is a full row. When this condition is satisfied, the relation (24) leads to what may be said as satisfied:
 (25)
(25)
where
![]() is the pseudo-inverse of
is the pseudo-inverse of .
.
Equation (25) allows for the determination of the coefficients of the matrices . The parameters
. The parameters  of the control law are selected such that the standard
of the control law are selected such that the standard  is minimal. This minimization leads to the following expression of the matrices
is minimal. This minimization leads to the following expression of the matrices :
:
 (26)
(26)
4. The Principe of the Algebraic Inversion of the Recurring State Equation
This principle derives its effectiveness from the fact that the asymptotic speeds of the points belonging to the closed curves (when ) constitute an integral part of the border of the searched stability region. This technique is identical to that developed in the case of continuous systems.
) constitute an integral part of the border of the searched stability region. This technique is identical to that developed in the case of continuous systems.
This method is obviously based on the execution of the iterations by reversing the sampling moments described by the parameter k of the state Equation (13) and represent the autonomous nonlinear discrete polynomial system [22] -[25] . Likewise, we have to consider the system described by the following equation:
 (27)
(27)
Such a system is called reverse, it is characterized by the same samples belonging to the closed curves of the state space and which describe the discrete dynamics of the system (13) but by reversing the direction of the states. The origin which is thought to be stable for the system (27), thus, becomes unstable for the system known as reverse (13).
5. Algebraic Approach to the Inversion of the State Discrete Equation
This section is dedicated to the synthesis of the analytical methods which aim at approximating the recurring state equation of the studied discrete system through a state equation which describes its evolution in the opposite direction in the state space.
An algebraic approach will then be considered [26] . Such an approach considers an initial field of asymptotic stability around an equilibrium point to carry out, thereafter, converse iterations allowing us to widen the initial field of the considered stability.
Let us suppose then:
![]() (28)
(28)
This assumption is rigorously justified in the case where the evolution from iteration to another is done with an optimal choice of the sampling period.
According to the analytical development given in [22] , we assume in the remaining part of this paper that the classes of discrete systems under consideration are truncated to the third order which can be written as follows:
 (29)
(29)
By replacing  by its expression (29) in (28) and by neglecting the terms
by its expression (29) in (28) and by neglecting the terms , for
, for , we can easily reach, after identification, the following equality:
, we can easily reach, after identification, the following equality:
 (30)
(30)
where

The expression (30) characterizes the term ![]() which describes a weak variation of the deviations describing the dynamics of the models studied between two successive sampling moments. The representation of the discrete state (28) is regarded as an approximation of the dynamic behavior in the reverse direction of the studied systems discrete states. Such an approximation is, in fact, an assumption which will be as much satisfied as the variation
which describes a weak variation of the deviations describing the dynamics of the models studied between two successive sampling moments. The representation of the discrete state (28) is regarded as an approximation of the dynamic behavior in the reverse direction of the studied systems discrete states. Such an approximation is, in fact, an assumption which will be as much satisfied as the variation ![]() is reduced. This imposes the choice of a weak sampling period [26] [27] .
is reduced. This imposes the choice of a weak sampling period [26] [27] .
6. Synthesis and Implementation of an Algorithm of Estimating an Attraction Domain
In this section, we suggest a synthesis algorithm which allows formulating the principal steps leading to the estimate of an asymptotic stability region of the discrete nonlinear systems [24] . Thus, the estimated ASR can be arbitrarily approximated by means of sequence of convergence of simple successive fields generated by Equation (13). Firstly, we start with an Initial Region of Asymptotic Stability (IRAS) noted by . A new field is, then, obtained by applying the first iteration of (13).
. A new field is, then, obtained by applying the first iteration of (13).
This algorithm is presented in 4 steps:
Step 1: It tends to determine the system equilibrium points out of the original point and to analyze the local stability of each point.
Step 2: It is likely to determine an IRAS  in the space around each asymptotically stable equilibrium point.
in the space around each asymptotically stable equilibrium point.
Step 3: It concerns the development of an iterative calculation based on Equation (13) initialized by a departure stability field  determined in Step 2.
determined in Step 2.
Step 4: It consists in stopping the iterative calculation based on Equation (13) when a broad ASR is obtained after the convergence of the curve towards a limited form.
The application of Step 1 does not generally present any difficulty, contrary to the determination of a IRAS. In order to solve this problem, we used a technique presented in [22] [23] .
The detailed analysis of the algorithm allows us to deduce some remarks and conclusions similar to the case of the reverse trajectory method considered for the continuous systems. Actually, the topological and graphic character on which this algorithm is based shows some difficulties for the high order systems. Nevertheless, it remains effective for reduced order systems![]() .
.
• Concerning the second order systems, the method converges towards a sufficiently large asymptotic stability region in a minimal time. This result comprises a very important performance in the context of synthesizing control laws that will be established on line [28] .
• For the systems of order higher than two, the method remains also applicable only to widen the initial asymptotic stability region. A sufficient number of  reverse iterations allows obtaining a border
reverse iterations allows obtaining a border  which limits a larger domain of asymptotic stability
which limits a larger domain of asymptotic stability .
.
Theorem [25] :
The discrete time state variables of Equation (13) are exponentially stable in the ball![]() , where
, where  is the positive solution of the polynomial equation:
is the positive solution of the polynomial equation:
 (31)
(31)
where  are positive numbers verifying:
are positive numbers verifying:

7. Simulation Results
The problem of transitory stability of the generator-systems becomes increasingly important because of the remarkable increase in the network dimensions of production and the transport of electrical energy [29] [30] .
It is perceived that the stability of the production systems of electrical energy is never global but local around an operating state considered as an equilibrium state.
This typical problem brought about by the disturbances in the production systems stability is the main factor that encouraged us to consider the exact asymptotic stability region of the considered systems [31] [32] .
The very study is about the application of the method of the suggested approaches to the linearizing control of a synchronous generator.
The synchronous generator can be described by a model of order three characterized by the state vector [33] :
 (32)
(32)
As for input, it has the excitation tension .
.
The following Equations represent this model [34] :
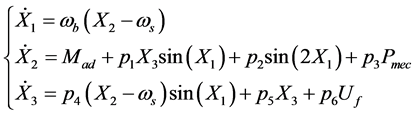 (33)
(33)
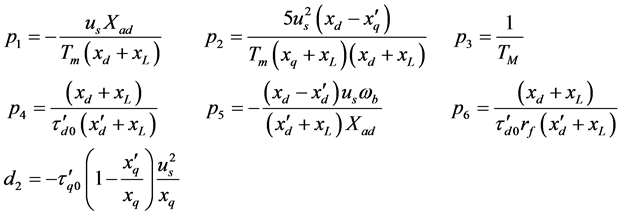
where  is an additional component which is expected to improve the performance of the small-scale model of the generator, and
is an additional component which is expected to improve the performance of the small-scale model of the generator, and  for
for  are the constants given by:
are the constants given by:
The development of the Equations around an operating point  leads to the following polynomial non-linear model [35] :
leads to the following polynomial non-linear model [35] :
 (34)
(34)
where
 (35)
(35)
The studied generator is characterized by the parameters expressed in the following reduced values (per unit “p.u”) [34] :

The discretization of the continuous model of the synchronous generator leads to a polynomial model of the following form:
 (36)
(36)
with:

The application of the control approach to the obtained discrete model lets us determine a polynomial control law:
 (37)
(37)
And a non-linear transformation
 (38)
(38)
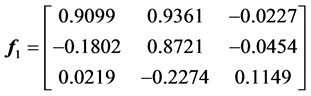
The line matrix  is, in fact, selected in a way that the dynamics of the arbitrary linear system is defined by poles equal to 0.6, 0.7, 0.7 which yield:
is, in fact, selected in a way that the dynamics of the arbitrary linear system is defined by poles equal to 0.6, 0.7, 0.7 which yield:

The line matrices  and
and  are given by:
are given by:
![]()

The validation of this nonlinear control law is yielded by simulation. The curves represented on Figure 1 to Figure 4 illustrate the regulation conditions of the variables ,
,  ,
, . On these curves, in fact, one can perceive an obvious improvement of the performances of the processes, especially from the point of view of the decrease of the oscillatory mode and the speed of the convergence of the different variables of the machine. These good performances are obtained with the help of a control signal. This control signal evolution is actually suitable and satisfactory.
. On these curves, in fact, one can perceive an obvious improvement of the performances of the processes, especially from the point of view of the decrease of the oscillatory mode and the speed of the convergence of the different variables of the machine. These good performances are obtained with the help of a control signal. This control signal evolution is actually suitable and satisfactory.
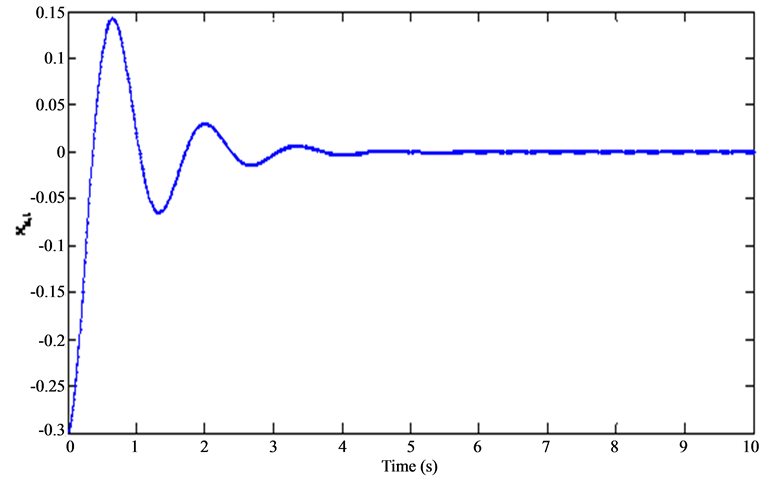
Figure 1. Evolution of the state .
.
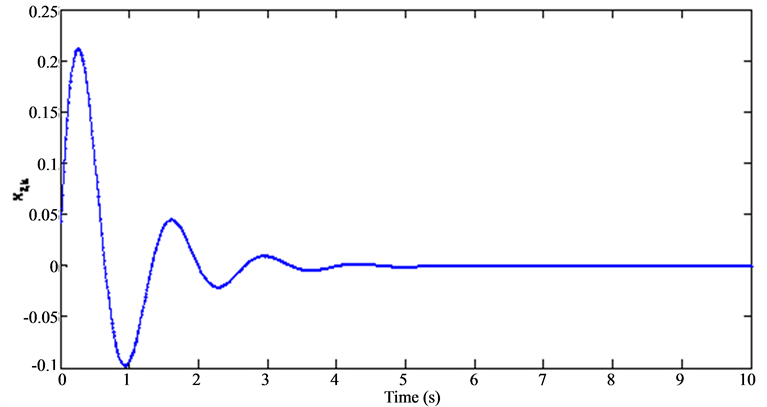
Figure 2. Evolution of the state .
.
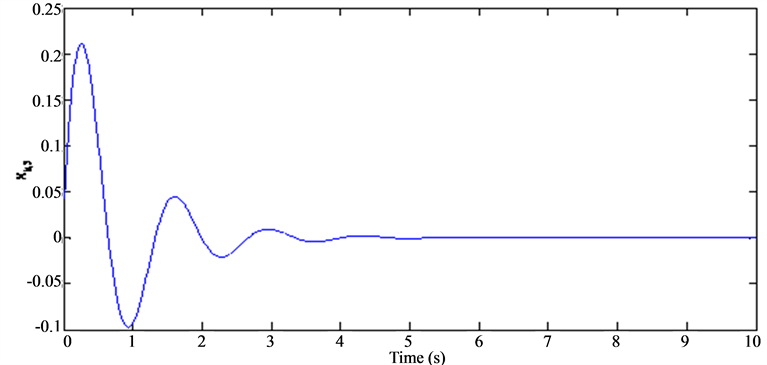
Figure 3. Evolution of the state .
.

Figure 4. Evolution of control .
.
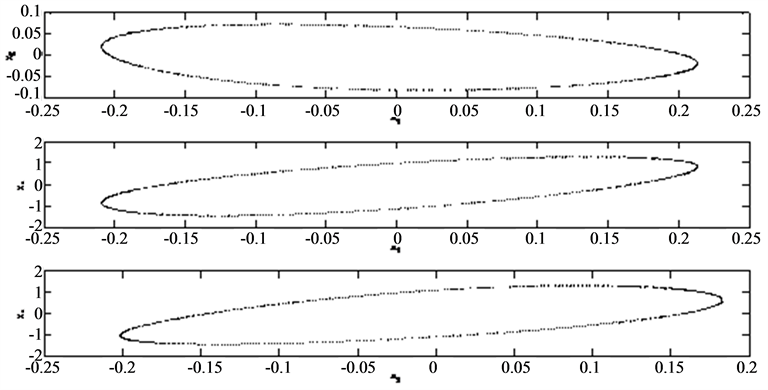
Figure 5. Aymptotic stability region of two Axes.
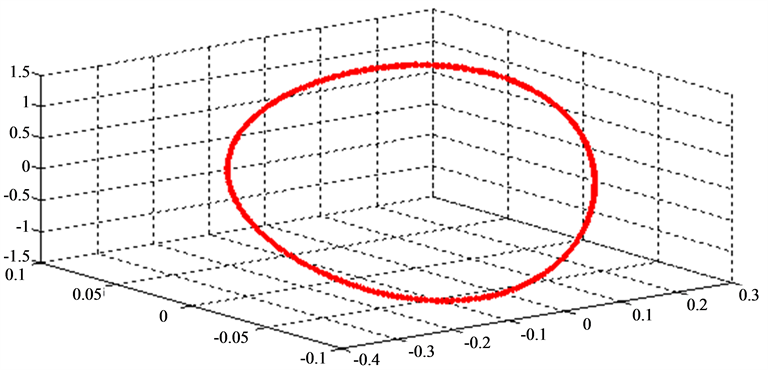
Figure 6. Asymptotic stability region of the synchronous generator.
Indeed, we may notice that the variables quickly return to the origin and that the recorded excesses remain within the tolerated limits. The same conclusion can be drawn to the control signal which permits to ensure this powerful regulation.
The discrete Reverse Trajectory Method (RTM) is theoretically exploitable for any locally stable nonlinear system. Moreover, it proves its effectiveness through the advantage of being numerically implementable for high order systems. What is more, one may also note that the performance of this method largely depends on the determination of an asymptotic initial region which will be used as an initial field for integration in opposite direction. We apply RTM so as to determine an Asymptotic Stability Region (ASR). The results of this step are given in Figure 5 and Figure 6.
We notice, in Figure 5 and Figure 6, the method remains applicable to the systems of order higher than two.
References
- Camilli, F. and Loreti, P. (2006) A Zubov’s Method for Stochastic Differential Equations. Nonlinear Differential Equations and Applications, 13, 205-222. http://dx.doi.org/10.1007/s00030-005-0036-1
- Lyapunov, A.M. (1892) The General Problem of the Stability of Motion. Kharkov Mathematical Society, Kharkov.
- Zubov, V.I. (1964) Methods of A. M. Lyapunov and Their Application. Noordho.
- Chesi, G., Garulli, A., Tesi, A. and Vicino, A. (2005) LMI-Based Computation of Optimal Quadratic Lyapunov Functions for Odd Polynomial Systems. International Journal of Robust and Nonlinear Control, 15, 35-49.http://dx.doi.org/10.1002/rnc.967
- Chesi, G., Garulli, A., Tesi, A. and Vicino, A. (2004) Robust Analysis of LFR Systems through Homogeneous Polynomial Lyapunov Functions. IEEE Transactions on Automatic Control, 49, 1211-1216.http://dx.doi.org/10.1109/TAC.2004.831152
- Hu, T. and Lin, Z. (2003) Composite Quadratic Lyapunov Functions for Constrained Control Systems. IEEE Transactions on Automatic Control, 48, 440-450. http://dx.doi.org/10.1109/TAC.2003.809149
- Benhadj Braiek, N. (1996) Determination of a Stability Radius for Discrete Nonlinear Systems. Journal of Systems Analysis Modelling and Simulation, 22, 315-322.
- Cao, Y. and Lin, Z. (2003) Stability Analysis of Discrete-Time Systems with Actuator Saturation by a Saturation-Dependent Lyapunov Function. Automatica, 39, 1235-1241. http://dx.doi.org/10.1016/S0005-1098(03)00072-4
- Coutinho, D.F., Fu, M. and Trofino, A. (2004) Robust Analysis and Control for a Class of Uncertain Nonlinear Discrete-Time Systems. Systems and Control Letters, 53, 377-393. http://dx.doi.org/10.1016/j.sysconle.2004.05.015
- Diblik, J. (2004) Anti-Lyapunov Method for Systems of Discrete Equations. Nonlinear Analysis: Theory, Methods and Applications, 57, 1043-1057.
- Charfeddine, S. and Jerbi, H. (2013) A Survery of Non Linear Gain Scheduling Design Control of Continuous and Discrete Time Systems. International Journal Modelling, Identification and Control, 19, 203-216.http://dx.doi.org/10.1504/IJMIC.2013.055427
- Charfeddine, S., Jerbi, H. and Sbita, L. (2013) NonLinear Dicsrete-Time Gain Scheduling Control for Affine Non Linear Polynomial Systems. International Review on Modelling and Simulations, 6, 1031-1041.
- Charfeddine, S. and Jerbi, H. (2012) Synthesis of a Polynomial Discrete Time Control Approach for Nonlinear Systems. 17th International Conference on Methods & Models in Automation & Robotics, Poland, 391-396.
- Tababe, K. (1985) Global Analysis of Continuous Analogs of the Levenberg-Marquardt and New-Raphson Methods for Solving Nonlinear Equation. Annual Institution Statistic Mathematic B, 37, 189-203.
- Tababe, K. (1979) Continuous Newton-Raphson Method for Solving an Underdetermined System of Nonlinear Equations. Journal Nonlinear Analysis, Theory Methods Application, 3, 495-503.http://dx.doi.org/10.1016/0362-546X(79)90064-6
- Isurugy, Y. and Shina, M. (1995) Discretisation of Continuous Time Control Laws for Nonlinear Systems with Computational Delay. Proceedings of the 3rd European Control Conference, Rome, 1995.
- Cao, Y. and Lin, Z. (2003) Stability Analysis of Discrete-Time Systems with Actuator Saturation by a Saturation-Dependent Lyapunov Function. Automatica, 39, 1235-1241. http://dx.doi.org/10.1016/S0005-1098(03)00072-4
- Jerbi, H. and Benhadj Braiek, N. (1999) On the Design of Linearizing Controller for Nonlinear Discrete Systems. IEEE SMC’99 International Conference Proceedings, Tokyo, 12-15 October 1999, 33-37.
- McNichols, K.H. and Fadli, M.S. (2003) Selecting Operating Points for Discrete Time Gain Scheduling. Computers and Electrical Engineering, 29, 289-301. http://dx.doi.org/10.1016/S0045-7906(01)00031-3
- McConley, M.W., Appleby, B.D., Dahleh, M.A. and Feron, E. (2000) A Computationally Efficient Lyapunov-Based Scheduling Procedure for Control of Nonlinear Systems with Stability Guarantees. IEEE Transactions on Automatic Control, 45, 33-49. http://dx.doi.org/10.1109/9.827354
- Rotella, F. and Borne, P. (1989) Explicit Solution of Sylvester and Lyapunov Equation. Mathematic and Computers in Simulation, 31, 271-281. http://dx.doi.org/10.1016/0378-4754(89)90163-8
- Bacha, A., Jerbi, H. and Benhadj Braiek, N. (2007) On the Synthesis of a Combined Discrete Reversing Trajectory Method for the Asymptotic Stability Region Estimation of Nonlinear Polynomial Systems. Proceedings of 13th IEEE IFAC, International Conference on Methods, Models in Automation and Robotics, IEEE Conference Number 12469, Szczecin, 27-30 August 2007, 243-248.
- Bacha, A., Jerbi, H. and Benhadj Braiek, N. (2008) Technique of Stability Domain Determination of Nonlinear Discreet Polynomial System. Proceedings of the 17th World Congress the International Federation of Automatic Control, Seoul, June 2008, 8690-8694.
- Bacha, A., Jerbi, H. and Benhadj Braiek, N. (2008) Backward Iteration Approaches for the Stability Domain of Estimation of Discrete Nonlinear Polynomial Systems. International Journal of Modelling, Identification and Control, 5, 313-319. http://dx.doi.org/10.1504/IJMIC.2008.023516
- BenHadj Braiek, N., Jerbi, H. and Bacha, A. (2008) Technique of Stability Domain Determination for Nonlinear Discrete Polynomial Systems. Proceedings of IFAC08, Seoul.
- Bacha, A., Jerbi, H. and Benhadj Braiek, N. (2007) A Comparative Stability Study between Two New Backward Iteration Approaches of Discrete Nonlinear Polynomial Systems. 4th International Multi-Conferences on Systems, Signals and Devices I.
- Bacha, A., Jerbi, H. and Benhadj Braiek, N. (2006) An Approach of Asymptotic Stability Domain Estimation of Discrete Polynomial Systems. Mathematical Modelling, Identification and Similation, CESA 2006 World Congress I.
- Jouili, K., Jerbi, H. and Benhdaj Braiek, N. (2010) An Advanced Fuzzy Logic Gain Scheduling Trajectory Control for Nonlinear Systems. Journal of Process Control, 20, 426-440. http://dx.doi.org/10.1016/j.jprocont.2010.01.001
- Kujundzic, S.M. (2004) Methods and Models for Stability, Controllability and Reliability Analysis of Systems Motion. M. Fizmatlit.
- Qi, R., Cook, D., Kliemann, W. and Vittal, V. (2000) Visualization of Stable Manifolds and Multidimensional Surfaces in the Analysis of Power System Dynamics. Journal of Nonlinear Sciences, 10, 175-195.http://dx.doi.org/10.1007/s003329910008
- Uemura, K., Matuski, J., Yamada, J. and Tsuji, T. (1972) Approximation of an Energy Function in Transient Stability Analysis of Power Systems. Electrical Engineer Japan, 92, 96-100.
- Williems, J.L. and Williems, J.C. (1971) The Application of Lyapunov Methods to the Computation of Transient Stability Regions for Multimachine Power Systems. IEEE Transactions on Power Apparatus and Systems, 4, 332-341.
- Anderson, P.M. and Fouad, A.A. Power System Control and Stability. The IOWA State University Press.
- Mielczarski, W. and Zajaczkowski, A.M. (1971) Nonlinear Field Voltage Control of Synchronous Generator Using Feedback. Automatica, 30, 1625-1630. http://dx.doi.org/10.1016/0005-1098(94)90102-3
- Jerbi, H. and Benhadj Braiek, N. (1995) Modélisation par Linéarisation et Commande d’un Générateur Synchrone. Congrès Maghrébin de Génie Electrique.