 International Journal of Geosciences, 2011, 2, 274-285 doi:10.4236/ijg.2011.23030 Published Online August 2011 (http://www.SciRP.org/journal/ijg) Copyright © 2011 SciRes. IJG Coupled Effects of Energy Dissipation and Travelling Velocity in the Run-Out Simulation of High-Speed Granular Masses Francesco Federico1, Giuseppe Favata 1University of Rome “Tor Vergata”, Rome, Italy E-mail: fdrfnc@gmail.com Received February 1, 2011; revised April 5, 2011; accepted June 2, 2011 Abstract The run-out of high speed granular masses or avalanches along mountain streams, till their arrest, is analyti- cally modeled. The power balance of a sliding granular mass along two planar sliding surfaces is written by taking into account the mass volume, the slopes of the surfaces, the fluid pressure and the energy dissipation. Dissipation is due to collisions and displacements, both localized within a layer at the base of the mass. The run-out, the transition from the first to the second sliding surface and the final run-up of the mass are de- scribed by Ordinary Differential Equations (ODEs), solved in closed form (particular cases) or by means of numerical procedures (general case). The proposed solutions allow to predict the run-up length and the speed evolution of the sliding mass as a function of the involved geometrical, physical and mechanical parameters as well as of the simplified rheological laws assumed to express the energy dissipation effects. The corre- sponding solutions obtained according to the Mohr-Coulomb or Voellmy resistance laws onto the sliding surfaces are recovered as particular cases. The run-out length of a documented case is finally back analysed through the proposed model. Keywords: Sliding Granular Mass, Granular Temperature, Shear Layer, Excess Interstitial Pressure 1. Introduction Great attention receives in scientific community the study of kinematic mechanisms of the flow of viscous fluid [1] or the chaotic movement of granular masses [2], because their destroying effects, often related to increasing an- thropization of piedmont areas. It is necessary to identify hazardous areas for the propagation of high-speed mov- ing masses. To this purpose, reliable criteria must be for- mulated and applied. Interstitial pressures at the base of the mass can vary from null or hydrostatic value to high values, due to possible water pressure excess, related to very rapid changes of pore volumes, often localized along a thin layer in proximity of the sliding surface [3]. Several models assume the validity of the Mohr-Cou- lomb (M-C) shear resistance criterion [4] along the slid- ing surface of the high-rate moving mass. To match ex- perimental observations of the run-out length with theo- retical results, small shear resistance angles must be assumed. The M-C law usually describes limit equili- brium (static) or simple sliding of blocks along rough surfaces (dynamic condition). More complex resistance laws should be taken into account [5] to describe the rapid sliding of granular masses because high speed relative motion and collisions between solid grains take place within a basal shear layer, causing a fluidification effect coupled with energy dissipations [6]. Therefore, it is not conceptually justifiable the reduction of the shear resistance angle, due to the high mobility of the grains [7] if the corresponding energy dissipation is not taken into account. Moreover, in situ observations show that the run-out length strongly depends on the mobilized volume of the mass [8-11]. In the paper, the rapid sliding of a granular mass along two planar surfaces is analytically modelled by account- ing for the effects of grain collisions. In section 2 the main features of the model and the assumed simplifying hypotheses are introduced; the go- verning equations are formulated (section 3), by intro- ducing the parameters which take into account the gra- nular temperature and the collisional dissipated energy. 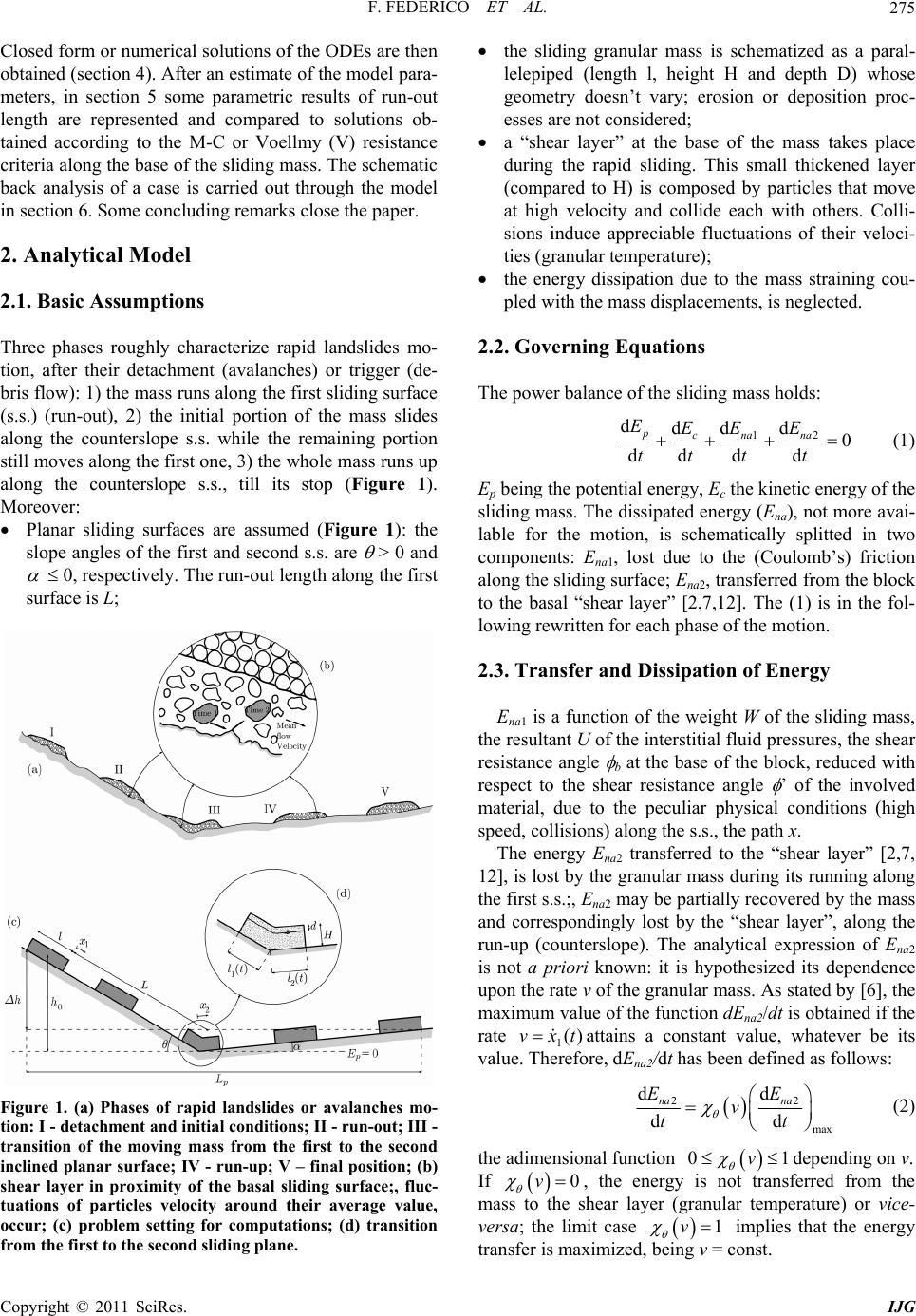 F. FEDERICO ET AL.275 Closed form or numerical solutions of the ODEs are then obtained (section 4). After an estimate of the model para- meters, in section 5 some parametric results of run-out length are represented and compared to solutions ob- tained according to the M-C or Voellmy (V) resistance criteria along the base of the sliding mass. The schematic back analysis of a case is carried out through the model in section 6. Some concluding remarks close the paper. 2. Analytical Model 2.1. Basic Assumptions Three phases roughly characterize rapid landslides mo- tion, after their detachment (avalanches) or trigger (de- bris flow): 1) the mass runs along the first sliding surface (s.s.) (run-out), 2) the initial portion of the mass slides along the counterslope s.s. while the remaining portion still moves along the first one, 3) the whole mass runs up along the counterslope s.s., till its stop (Figure 1). Moreover: Planar sliding surfaces are assumed (Figure 1): the slope angles of the first and second s.s. are > 0 and 0, respectively. The run-out length along the first surface is L; Figure 1. (a) Phases of rapid landslides or avalanches mo- tion: I - detachment and initial conditions; II - run-out; III - transition of the moving mass from the first to the second inclined planar surface; IV - run-up; V – final position; (b) shear layer in proximity of the basal sliding surface;, fluc- tuations of particles velocity around their average value, occur; (c) problem setting for computations; (d) transition from the first to the second sliding plane. the sliding granular mass is schematized as a paral- lelepiped (length l, height H and depth D) whose geometry doesn’t vary; erosion or deposition proc- esses are not considered; a “shear layer” at the base of the mass takes place during the rapid sliding. This small thickened layer (compared to H) is composed by particles that move at high velocity and collide each with others. Colli- sions induce appreciable fluctuations of their veloci- ties (granular temperature); the energy dissipation due to the mass straining cou- pled with the mass displacements, is neglected. 2.2. Governing Equations The power balance of the sliding mass holds: 12 ddd d0 dd dd pcna na EEE E tt tt (1) Ep being the potential energy, Ec the kinetic energy of the sliding mass. The dissipated energy (Ena), not more avai- lable for the motion, is schematically splitted in two components: Ena1, lost due to the (Coulomb’s) friction along the sliding surface; Ena2, transferred from the block to the basal “shear layer” [2,7,12]. The (1) is in the fol- lowing rewritten for each phase of the motion. 2.3. Transfer and Dissipation of Energy Ena1 is a function of the weight W of the sliding mass, the resultant U of the interstitial fluid pressures, the shear resistance angle b at the base of the block, reduced with respect to the shear resistance angle ’ of the involved material, due to the peculiar physical conditions (high speed, collisions) along the s.s., the path x. The energy Ena2 transferred to the “shear layer” [2,7, 12], is lost by the granular mass during its running along the first s.s.;, Ena2 may be partially recovered by the mass and correspondingly lost by the “shear layer”, along the run-up (counterslope). The analytical expression of Ena2 is not a priori known: it is hypothesized its dependence upon the rate v of the granular mass. As stated by [6], the maximum value of the function dEna2/dt is obtained if the rate )( 1txv attains a constant value, whatever be its value. Therefore, dEna2/dt has been defined as follows: 2 max dd dd na na EE v tt 2 (2) the adimensional function depending on v. 0v 1 If 0v , the energy is not transferred from the mass to the shear layer (granular temperature) or vice- versa; the limit case 1v implies that the energy transfer is maximized, being v = const. Copyright © 2011 SciRes. IJG  F. FEDERICO ET AL. 276 H 2.4. Effects of Interstitial Pressures The interstitial pressurew(x) at the base of the mass affects the run-out length; w(x) simply assumes the constant value (nil value as limit case) through the relation: ww (Figure 1), w being the spe- cific weight of the water; d = 0 if the whole mass is saturated; d = H if the mass is dry; wmay exceed the hydrostatic value due to the mechanical effects associ- ated with the rapid change of intergranular volumes of the voids and the corresponding growth of interstitial water pressures excess [3,6]. To simulate this effect, d < 0 values must be assigned. The length d thus lies in the range: p Hd p w p p p min max ddd (3) If the sliding granular mass always transmits positive normal stresses to the s.s., through the shear layer, the minimum value min can be deduced by imposing the equilibrium along the direction orthogonal to the sliding plane: d min mincos1 ;cos1 tt ww dH H (4) t being the unit weight of the sliding mass and dmin a negative real number. 2.5. Sliding along the First Slope The potential energy E in the power balance (1) is rewritten in function of the abscissa x1 (Figure 1) as fol- lows: 01 sin p Emghx (5) h0 being the initial elevation of the centre of mass with respect to a reference plane; g the gravity acceleration and m the mass of the sliding granular body. The dissipated energy 11na Ex is then rewritten as follows: 1 11 0 1 costan d costan x na b b ExW Us WUx (6) U < Wcos being the global force associated with the pressure wat the base of the mass, W the mass weight and b the reduced shear resistance angle at the base of the mass. p The dissipated energy Ena2 (2) depends upon the rate v of the granular mass. According to (5), (6), the equation (1) is rewritten as: 2 1 1 2 1 d 1 sin 2 d +costand na b xt mgx tmdtE WUxt t (7) The maximum value for dEna2/dt is gained if 1 vxt assumes a constant value [6]. It may be writ- ten: 2 1 max dsincos tan d na b EWWUx t t (8) Recalling the (2), dEna2/dt becomes: 2 1 dsincos tan d na b EvWW Uxt t (9) the function 0v 1 being previously introduced. By replacing the (9) in (7), it is obtained: 2 1 1 1 2 sincostan 1 b dx t dt U vxt W (10) The ratio U/W is rewritten as: 1 ww tt HdlD Ud WHlD H (11) So, the Equation (11) becomes: 2 1 1 1 2 tan tantan11( ) cos wb bt dx t dt d vxt H (12) Let be ,, 11 cos w t d RR dH (13) The derivative of equation (12) gets: 1cos tantan1 b tg Rv (14) According to the assumed hypotheses, the time deriva- tive of the energy component Ena2, for unit mass, is: 2 dcos tantan d na b E Rv t (15) Through the (15), the discriminant value * for which dEna2/dt = 0 may be determined, by solving the equation: * ** cos tantan0 b gR v (16) If the slope angle < *, dEna2/dt < 0: the sliding mass receives energy from the shear layer. If > *, dEna2/dt > 0: the sliding mass provides energy to the shear layer. Being interesting only the conditions and * cos 0 *0v , according to the (13), the (16) becomes: Copyright © 2011 SciRes. IJG  F. FEDERICO ET AL.277 * * tan1tan 0 cos b (17) Through the (17), * is obtained: * 2 2424 2 tan arccos cottan1(tan ) (tan )(tan )(tan ) 1(tan ) b bb b bb b b (18) 1 wt dH (19) In the simple case d = H (no interstitial fluid pressure), it results = 0 and the equation (18) gets * = b. The sign of the derivative dEna2/dt depends on the sign of the expression tantan b R , the other terms being positive. This sign is positive along the first planar s.s. (otherwise, the motion cannot take place), while is negative along the second s.s., because we must replace > 0 with < * (reduced slope) or ≤ 0 (counter- slope). 2.6. Sliding along the Counterslope Surface The motion law along the counterslope s.s. is obtained by substituting in the (14) the angle > 0 with ≤ 0; cor- respondingly, the function (v) must be replaced by (v): 2cos tantan1 b tg Rv (20) where: 11 cos w t d R 0 (21) The ODE (20) must be solved taking into account the following initial conditions: 22 00; 0 xv v0 being the velocity of the mass after the full transition from the first to the second sliding planar surface. 2.7. Transition from the First to the Second Slope By neglecting the additional lost of energy coupled with peculiar strains associated with the slope change of the s.s., the ODE expressing the motion during the transition phase may be approximated through the linear combina- tion of (14) and (20): 12 1 12 2 cos tantan1 cos(tantan)10 b b xt gRv lt xt gRv lt (22) l1(t) being the length of the portion of the granular mass resting on the first surface and l2(t) = x12(t) the length of the remaining part running up along the second plane (run-up). So, l1(t) + l2(t) = l, neglecting second or- der geometrical aspects and accounting for the consider- able length of the sliding granular mass (Figure 1(d)). After some algebra, Eqution (22) can be written as: 12 12 12 cos tantan1 cos tantan1 b b g tRvl l gRvxt l xt (23) The second term figuring in the expressions R and R represents the contribution due to interstitial pressures; it is always positive because d H. By decreasing d (the free surface moves towards the top of the mass) R and R decrease; the terms tantan b R and tantan b R consequently increase. So, all other factors assuming constant values, the acceleration will be as greater as smaller is d. 2.8. Acceleration and limit rate Referring to the acceleration along each sliding surface, equations (14) and (20) can be rewritten as follows: cos tantan1 b tg Rv (24) where: 11 cos w t d R (25) 0 for 0 0 for L Ll (26) The term cos 1rv gv 01v is always posi- tive along both sliding surfaces (). If the increase of the function (v) with the rate v of the mass is assumed, the function r(v) will decrease if v increases. Equation (24) can be thus rewritten as: tantan b xt rvR (27) Coefficient 1R is equal to one if the interstitial pressures are equal to zero. Along the first surface, tan tanR 0 b , otherwise, the initial conditions 11 00,x00x would not allow the motion begin- ning; thus, the acceleration will be positive, the sliding rate will increase, r(v) will decrease and, consequently, a decrease of acceleration, always positive, will occur along the path. The acceleration will vanish if the rate approaches its limit value, for which , or lim 0rv lim 1v . Copyright © 2011 SciRes. IJG  F. FEDERICO ET AL. 278 Along the second inclined plane, tantan0 b R : therefore, the acceleration now assumes negative values, the sliding rate will decrease, r(v) will increase and, consequently, the absolute value of acceleration (which is, however, negative) will increase. 3. Mathematical Model 3.1. The (v) Function The function (v) governs both transfer and dissipation of energy taking place near the sliding surfaces, due to multiple collisions between particles, as well as rotations of each particle around an axis [6]. The function 0,1v has been analytically represented through a second order, rate increasing polynomial function: 2 0 vv v (28) 0 being an adimensional constant; and are con- stants whose dimensions are the inverse of velocity and the inverse of square velocity, respectively ( = or ). If , it is obtained . The limit value of the rate corresponding to of the slid- ing mass may be obtained by imposing: lim 1v 10xt 10xt 2 0lim lim 1vv (29) The (29) gets: 2 0 lim 41 2 v (30) The negative solution of (30) is not significant. Coefficients 0, and cannot assume arbitrary values; they must respect the conditions deriving from the inequalities as well as from the definition domains of the integration constants (see sections 3.3 and 3.4), re- ported in Table 1. 3.2. Equations of Motion After substitution of (28) in (14), (20) and (22), the equa- tions of motion, are written as follows: Table 1. Imposed conditions on the coefficients of the model, (v) being expressed by (28). Condition 0 2 0 41 0 0 2 0 21 41 v 2 111 0xtABxtCx t (31) 2 222 0xt DExt Fxt (32) 1212 1212 2 12 1212 1212 2 12 1212120 A tABxt Cxtxt l BCD tx txtxx t lll EF xtxt xtxt ll (33) where 0 cos tantan1 b Ag R (34a) costantan b Bg R (34b) costantan b Cg R (34c) 0 cos tantan1 b DgR (34d) costantan b Eg R (34e) costantan b Fg R (34f) 3.3. Analytical Solution: Sliding along the First Slope The integration of Equation (31) gets: 2 12 2 1 14 2 4 tanh2 xtBCCB AC C BACCCt C (35) 2 112 2 2 1 12 2 4 2lncosh2 xtBC CtCC C BACCCt CC (36) The unknown constants C1 and C2 are determined through the initial conditions: 11 00, 00xx 122 2arctanh 44 CB CBAC BAC (37a) 222 2 arctanh 44 11 4 ln2 BB CCBACBAC BAC CAC (37b) 3.4. Analytical Solution: Sliding along the Second Slope The analytical integration of (32) (counterslope) gets: Copyright © 2011 SciRes. IJG  F. FEDERICO ET AL.279 2 22 2 3 14 2 4 tanh2 xtEFFEDF F EDFCFt F (38) 2 23 2 2 3 12 2 4 2lncosh 2 xtEC FtFC F EDFCFt FF 4 0 (39) By imposing the conditions: 22 00, 0 xv the unknown constants are determined: 0 322 2 2arctanh 44 vE F CEDF EDF (40a) 0 422 2 2 2 0 2 arctanh 44 11 4 ln242 Fv E E CFEDFe DF EDF FEDFFvE (40b) 3.5. Transition from the First to the Second Slope The integration of (33) is carried out by means of a nu- merical procedure, by assigning initial conditions: 1212 1 00, 0 xv v1f being the rate of the sliding granular mass at the end of the first inclined planar s.s. To this aim, the fourth order Runge-Kutta method with adaptive step size has been implemented in MathCad. It is worth observing that the proposed analytical solu- tions have been found referring to the trinomial formula (v) (28). If (v) is simply expressed by assuming (v) = 0 or (v) = 0 or both, it is possible to express the ana- lytical solution in closed form, also for the transition from the first towards the second s.s. 4. Characterization of the (v) function 4.1. Premise The limits of the function (v) (Eqution (20)) are the same as those assumed for the function (v). Part of the energy is given back to the sliding mass by the shear layer, whose granular temperature gradually decreases, due to the corresponding decrease of the average run-up rate. If the inequalities are taken into account, the maximum negative variation of lost energy, as well as the maximum variation of energy recovered by the sliding granular mass, cannot exceed the maximum value corresponding to the limit case v = cost. The time variation of energy lost due to granular temperature then assumes negative values along the second sliding surface; thus, the granular mass recovers energy by the shear layer. The function (v) modulates the part of energy unavailable for the motion; it incorporates the effects due to granular temperature and collisional dissipations along the first inclined plane; (v), the part of energy given back to the sliding granular mass, net collisional dissipa- tions; then, (v) cannot be equal to (v): the inequality 0v 1 v v must always hold. 4.2. Coefficients To estimate the parameters 0, , (function (v)), it is first analyzed the simpler case 0 . is linearly related to the sliding rate and it is roughly correlated to the macro-viscous regime [14,15] that takes place only for small velocities of the granular mass; for a long and rapid sliding path, it does not seem prevalent. Attention is so focused to , by assuming that 0 as- sumes the same value along both the sliding surfaces. cannot assume the same value along the two s.s. Along the first surface ( = ), modulates the power subtracted to the granular mass, not available for the mo- tion. A part, here defined , is stored as power related to granular temperature; the remaining part, , is lost due to the collisions associated to the granular temperature. Therefore, analytically expresses the sum of the pow- ers related both to the granular temperature and colli- sional dissipation: 1 (41) Along the counterslope plane ( = ), the “stored” power is partly given back to the sliding mass ( and partly dissipated through collisions. Therefore, represents the power given back to the granular mass; it must express the difference between the power previ- ously “stored” ( ) and the power again dissipated ( ): 1 (42) / represents the ratio between the powers (Ecoll) lost due to collisions and (Egt) stored through the granular temperature: coll t E kE (43) Copyright © 2011 SciRes. IJG  F. FEDERICO ET AL. 280 To better express the ratio / , the additional hy- nstant average mass potheses of binary collisions and co mg of the grains composing the sliding mass are assumed. It 13]: is possible to express Ecoll as [ 22 11e 4 collg c EmNv (44) between two colliding v is the relative velocitygrains, e is their restitution coefficient, falling in the and Nc is the number of collisions. range 0 - 1, The energy related to the granular temperature can be expressed, in turn, as [12]: 2 2 gt g EmNv 1 (45) N, number of grains, v, average value of the modulus of the velocity fluctuation vector. If all gr N/2; v and the relative velocity v may be related each ains collide, Nc = other through the relation: vv (46) being 02 ; if = 0, the relative velocities of all grains are null: therefore, no collisi contrary, = 2 means that, for ea g grains ons take place. On the ch collision, the two collidin, moving along the same direction, as- sume opposite velocity vectors; their relative velocity doubles the absolute velocity of each grain. By further assuming 0 c NN , (43) becomes: 22 11e k4 (47) parameter ( Figure 2). Theref is obtained: ]1,0[k ore, it k (48) thssumed if = , while the negative one if = . The ratio r ≥ 1 1 e positive sign must be a is finally defined: 1 1 k rk (49) If energy dissipation after collisions doe place (k = 0), along the whole path, it To estimate parameters 0, , it may be observed that, if s not take results r = 1. 0 , the limit rate along the first s.s. is: 0 lim 1 v (50) Let us consider the high speed granula terized by typical maximum velocitie preliminary range for parameters 0, r mass charac- s 20 - 40 m/s; a Figure 2. Parameter k vs. coefficient e, for some values of . χ 0 Figure 3. Couples values, vs. k; vlim∈[20,40] m/s. ;Figure 4. Range of admissible values for 0 andk=0 or k=1; 20 ≤vlim≤40. zed volume V, the ratio f(V) = h/Lp. Through an empirical relationship, for a given sliding ry kn through the empirical criteria, which express, as a func- tion of the mobili corresponding to these values of limit velocity is below obtained (Fig- ure 3 and 4): 43 510 10 , 00.20.4 . The mobilized friction angle mob cae estimated n b volume, it is possible to find the ratio f(V) and the total sliding length path LT. Being the problem geomet own, the values of L (run-out length along the first Copyright © 2011 SciRes. IJG  F. FEDERICO ET AL.281 sliding surface), (corresponding slope angle), x2f the run-up length along the counterslope surface, l (length of the mass), LT will depend upon , as follows: 2 sin cos cos sin Tf Ll f LLlx Lf (51) By this way, at the base of the sliding granular m simultaneously frictional and collisional dissipation last ones are represented by the term r ) occur. obtained ac sliding mass. em sures at the base of ncepally ad- m Ta ob ined through the Corominas’ relation f(V) = 10 ass, s (the It is possible to relate to each value of f(V), computed through an empirical criterion, a couple of values r, b, allowing to estimate the total run-out length cording to the empirical criterion. Referring to Coro- minas’ criterion [8], b values are reported in Table 2 for given r , angles , mobilized volume V. The limit value r = 1 gets conventional run-out lengths values according to the Mohr-Coulomb shear resistance law b(r = 1) at the base of the If r >1, energy dissipation, due to collisions localized in the basal shear layer [2,7,12], occurs. To recover the run-out length estimated through the pirical law, it is necessary to assign a reduced friction angle, also depending by interstitial pres the mass (not considered in the empirical criterion). For high values of r (e.g. r= 3), a friction angle al- lowing to estimate the same length forecasted by the em- pirical relationship cannot be determined. Therefore, the mobilized friction angle b, smaller than the shear resistance angle ’ (static or almost static conditions), at the base of the mass, is cotu issible only if, contextually, collisional dissipations, due to granular temperature, are taken into account. Values of b, for some r and values and dry (d/H = 1) or saturated (d/H = 0) conditions, are drawn in Figure 5. ble 2. Reduced shear resistance angle b values vs angle , for assigned r allowing to estimate the same run-out length ta –0.85logV+0.047; V = 106 m3, = 30˚, L = 1000 m, l = 100 m, t = 20 kN/m3, = 10–3 s2/m2, = 0, 0 = 0.2. b[˚] [°]LT[m] r d/H = 1 d/H = 0 0 1645 Figure 5. Values of reduced shear resistance angle acting at the base of the block with the a-dimensional factor r. It is possible to highlight the existence of b ranges for different r values. It is worth observing that high cou 5. .1 = 3.75; further, for each case, n- terslope values (e.g. = –15˚) narrow the range of b(r ); small r variations cause appreciable b variations. Results The run-out length, velocity and dissipated energy along the path, computed through the model (r = 1, r =1 and r 0 , 0 , 00.2 ), ar g values obtained e compared in Figure 6to the correspond- according to thehr-C th e tha obta ss. If or criterion (two values of turbulence coeffi- ci Moinoulomb (M-C) or Voellmy (V) resistance criterion at the base of the mass, neglecting the granular temperature effects. The proposed model gets a run-out lengqual tot one inable if the M-C resistance criterion is assumed at the base (r = 1); conversely, by assuming r = 3.7, the computed run-out length is equal to the one estimated if the V criterion is applied at the base of the sliding ma r = 1.1, an intermediate run-out length is obtained. For both cases, the sliding rate obtained through the model is smaller than the ones computed through M-C or V criteria; if r = 1 the rate computed through the model is almost constant along an appreciable length of the path. 1 19.2 8 37.5 15.7 1.5 3 6 11.8 –5 1516 1 1.5 3 19.4 5.5 2.6 38.2 10.7 5.4 –10 1433 1 1.5 3 19.7 0.2 – 38.7 5.8 – Computed rate and dissipated energy, for three val- ues, by assuming r = 1.5, are reported in Figure 7. The same values of the rate are compared with those ones obtained by assuming the M-C (three different friction angle) V ent ) at the base of the mass. If the M-C-criterion is applied, high run-out distances (particularly for small b), but excessive rate values, are obtained. Instead, if the V criterion acts, although obtained rate values are accept- able, small run-out lengths are obtained, because the hard –15 1375 1 1.5 3 19.8 0.2 – 39.5 0.5 – Copyright © 2011 SciRes. IJG 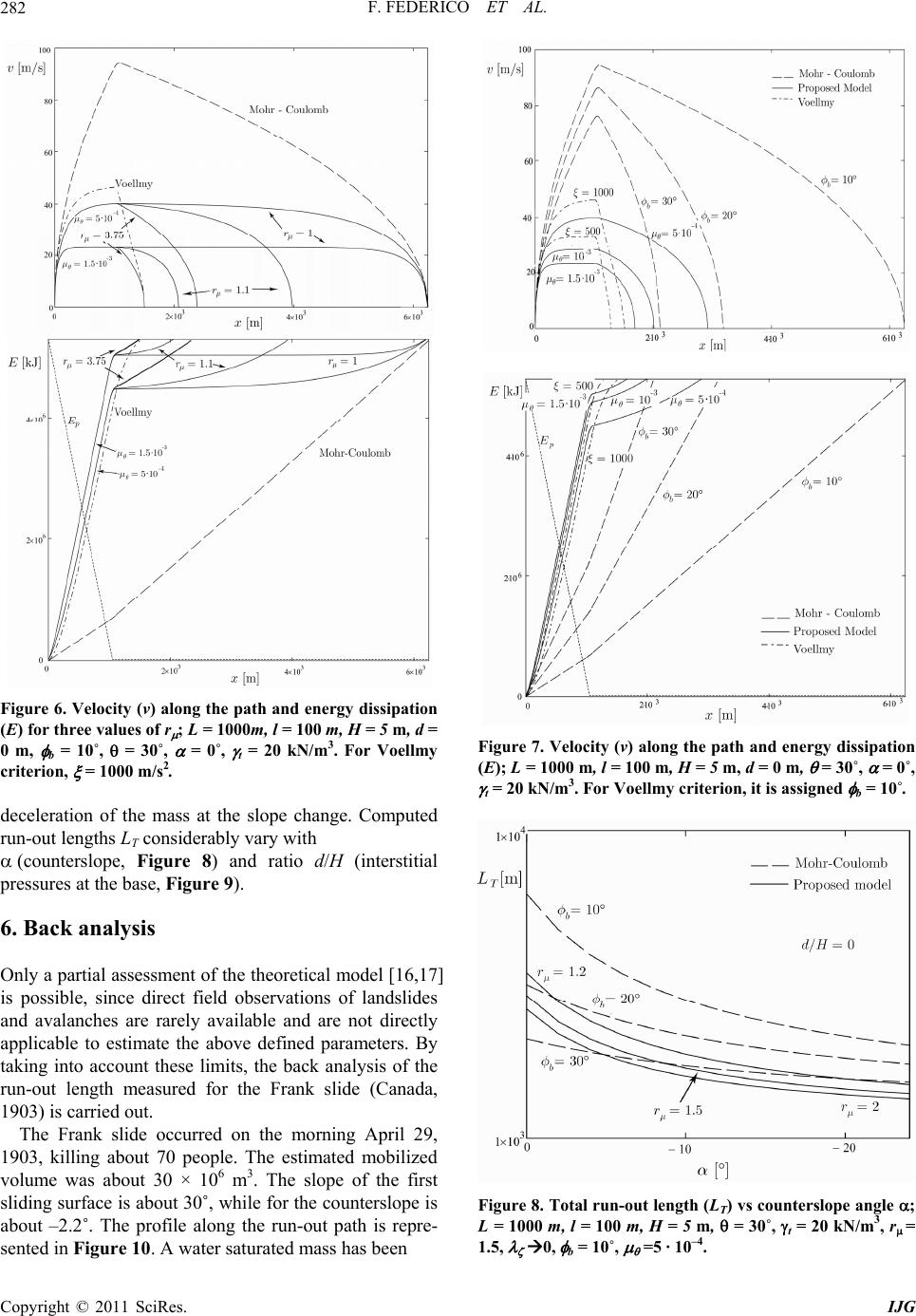 F. FEDERICO ET AL. 282 Figure 6. Velocity (v) along the path and energy dissipation (E) for three values of r ; L = 1000m, l = 100 m, H = 5 m, d = 0 m, b = 10˚, = 30˚, = 0˚, t = 20 kN/m3. For Voellmy criterion, = 1000 m/s2. deceleration of the mass at the slope change. Computed . Back analysis l model [16,17] ble and are not directly pplicable to estimate the above defined parameters. By ese limits, the back analysis of the n-out length measured for the Frank slide (Canada, water saturated mass has been run-out lengths LT considerably vary with counterslope, Figure 8 and ratio d/H (interstitial pressures at the base, Figure 9). 6 Only a partial assessment of the theoretica is possible, since direct field observations of landslides and avalanches are rarely availa a taking into account th ru 1903) is carried out. The Frank slide occurred on the morning April 29, 1903, killing about 70 people. The estimated mobilized volume was about 30 × 106 m 3. The slope of the first sliding surface is about 30˚, while for the counterslope is about –2.2˚. The profile along the run-out path is repre- sented in Figure 10. A Figure 7. Velocity (v) along the path and energy dissipation (E); L = 1000 m, l = 100 m, H = 5 m, d = 0 m, = 30˚, = 0˚, t = 20 kN/m3. For Voellmy criterion, it is assigned b = 10˚. Figure 8. Total run-out length (LT) vs counterslope angle ; L = 1000 m, l = 100 m, H = 5 m, = 30˚, t = 20 kN/m3, r= 1.5, 0, b = 10˚, =5 · 10–4. Copyright © 2011 SciRes. IJG 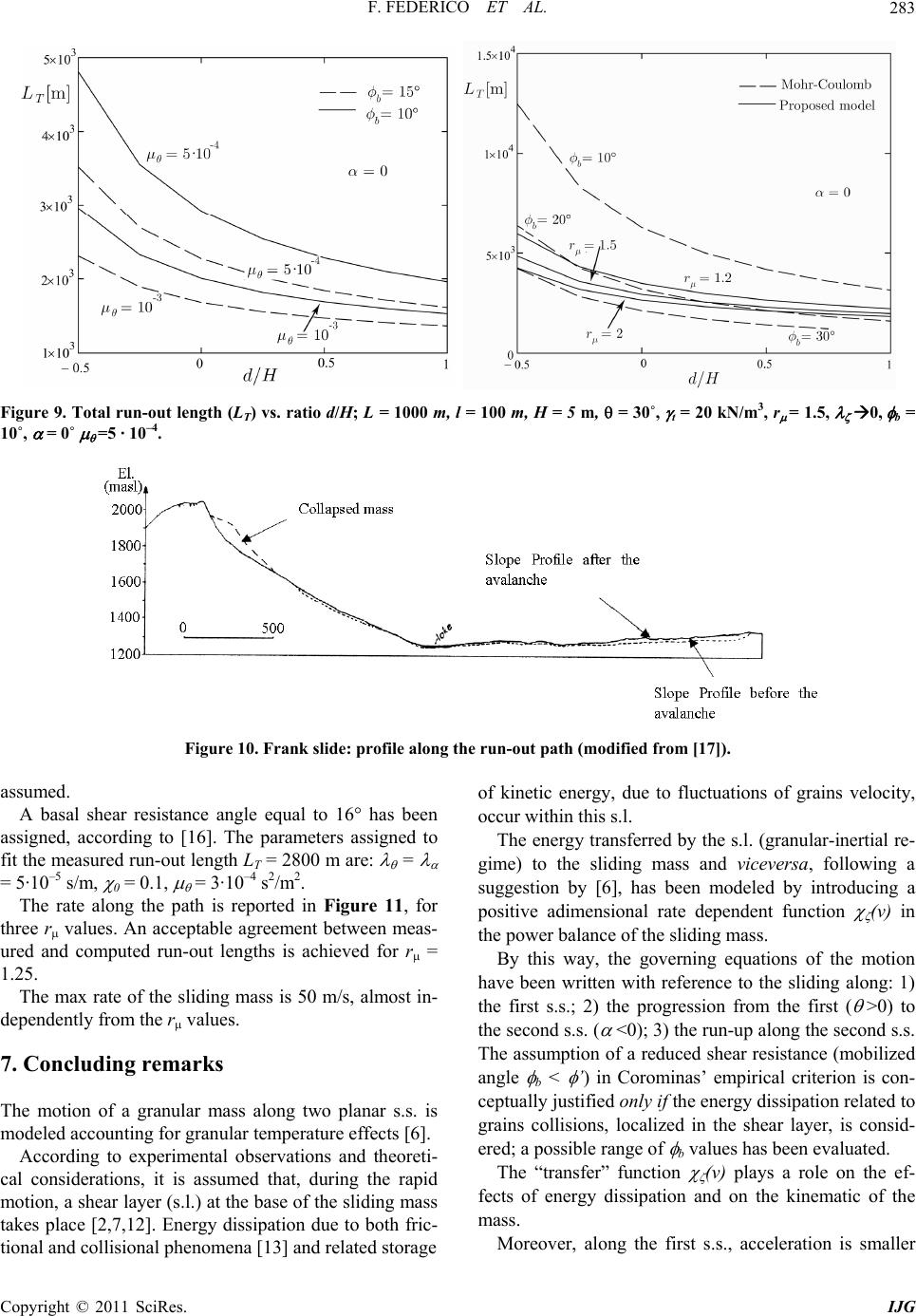 F. FEDERICO ET AL. Copyright © 2011 SciRes. IJG 283 Figure 9. Total run-out length (LT) vs. ratio d/H; L = 1000 m, l = 100 m, H = 5 m, = 30˚, t = 20 kN/m3, r = 1.5, 0, b = 10˚, = 0˚ =5 · 10–4. Figure 10. Frank slide: profile along e run-out path (modified from [17]). A basal shear resistance angle equal to 16° has been assigned, according to [16]. The parameters assigned to fit the measured run-out length LT = 2800 m are: = = 5·10–5 s/m, 0 = 0.1, = 3·10–4 s2/m2. The rate along the path is reported in Figure 11, for three r values. An acceptable agreement between meas- ured and computed run-out lengths is achieved for r = 1.25. The max rate of the sliding mass is 50 m/s, almost in- dependently from the r values. 7. Concluding remarks The motion of a granu odeled accounting for granular temperature effects [6]. g to experimental observations and theoreti- ca related storage of kinetic energy, due to fluctuations of grains velocity, occur within this s.l. The energy transferred by the s.l. (granular-inertial re- gime) to the sliding mass and viceversa, following a suggestion by [6], has been modeled by introducing a positive adimensional rate dependent function (v) in the power balance of the sliding mass. By this way, the governing equations of the motion have been written with reference to the sliding along: 1) the first s.s.; 2) the progression from the first ( >0) to the second s.s. ( <0); 3) the run-up along the second s.s. The assumption of a reduced shear resistance (mobilized angle b < ’) in Corominas’ empirical criterion is con- dissipation related to er th assumed. lar mass along two planar s.s. is ceptually justified only if the energy grains collisions, localized in the shear layer, is consid- med; a possible range of b values has been evaluated. The “transfer” function (v) plays a role on the ef- fects of energy dissipation and on the kinematic of the mass. Accordin l considerations, it is assumed that, during the rapid motion, a shear layer (s.l.) at the base of the sliding mass takes place [2,7,12]. Energy dissipation due to both fric- tional and collisional phenomena [13] andMoreover, along the first s.s., acceleration is smaller 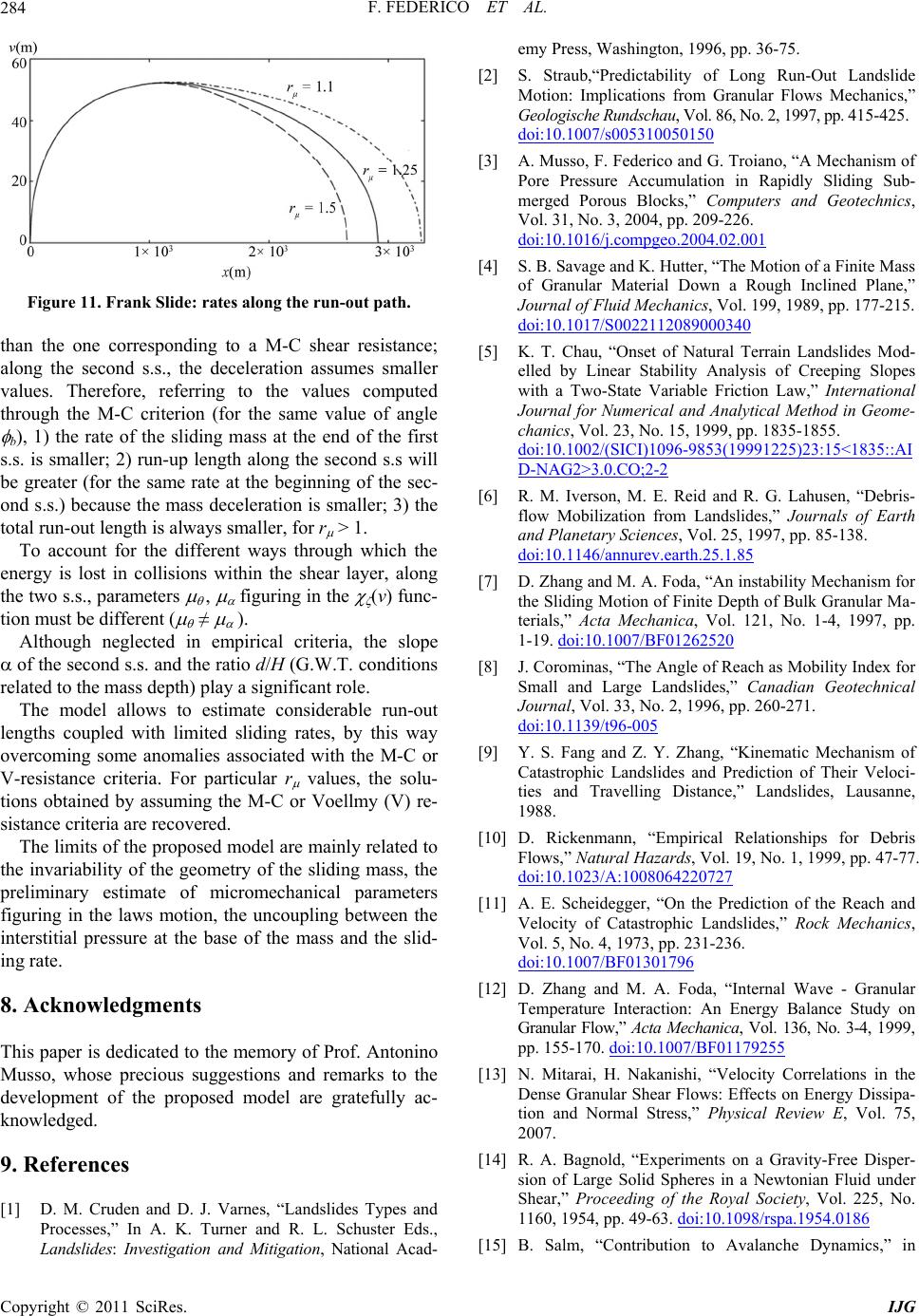 F. FEDERICO ET AL. 284 Figure 11. Frank Slide: rates along the run-out path. th t ns re coupled with limited sliding rates, by this ov V-resistance criteria. For particular r values, the solu- tions obtained by assuming the M-C or Voellmy (V) re- sistance criteria are recovered. The limits of the proposed model are mainly related to the invariability of the geometry of the sliding mass, the preliminary estimate of micromechanical param figuring in the laws motion, the uncoupling between interstitial pressure at the base of the mass and the slid- ing rate. 8. Acknowledgments his paper is dedicated to the memory of Prof. Antonino 9 Landslides: Investigation and Mitigation, National A [2] an the one corresponding to a M-C shear resistance; along the second s.s., the deceleration assumes smaller values. Therefore, referring to the values computed through the M-C criterion (for the same value of angle b), 1) the rate of the sliding mass at the end of he first s.s. is smaller; 2) run-up length along the second s.s will be greater (for the same rate at the beginning of the sec- ond s.s.) because the mass deceleration is smaller; 3) the total run-out length is always smaller, for r > 1. To account for the different ways through which the energy is lost in collisions within the shear layer, along the two s.s., parameters , figuring in the (v) func- tion must be different ( ≠ ). Although neglected in empirical criteria, the slope of the second s.s. and the ratio d/H (G.W.T. conditio lated to the mass depth) play a significant role. The model allows to estimate considerable run-out lengths way ercoming some anomalies associated with the M-C or eters the T Musso, whose precious suggestions and remarks to the development of the proposed model are gratefully ac- knowledged. . References [1] D. M. Cruden and D. J. Varnes, “Landslides Types and Processes,” In A. K. Turner and R. L. Schuster Eds., emy Press, Washington, 1996, pp. 36-75. ca d- S. Straub,“Predictability of Long Run-Out Landslide Motion: Implications from Granular Flows Mechanics,” Geologische Rundschau, Vol. 86, No. 2, 1997, pp. 415-425. doi:10.1007/s005310050150 [3] A. Musso, F. Federico and G. Troiano, “A Mechanism of Pore Pressure Accumulation in Rapidly Sliding Sub- merged Porous Blocks,” Computers and Geotechnics, Vol. 31, No. 3, 2004, pp. 209-226. doi:10.1016/j.compgeo.2004.02.001 [4] S. B. Savage and K. Hutter, “The Motion of a Finite Mass of Granular Material Down a Rough Inclined Plane,” Journal of Fluid Mechanics, Vol. 199, 1989, pp. 177-215. doi:10.1017/S0022112089000340 [5] K. T. Chau, “Onset of Natural Terrain Landslides Mod- elled by Linear Stability Analysis of Creeping Slopes with a Two-State Variable Friction Law,” International Journal for Numerical and Analytical Method in Geome- chanics, Vol. 23, No. 15, 1999, pp. 1835-1855. doi:10.1002/(SICI)1096-9853(19991225)23:15<1835::AI D-NAG2>3.0.CO;2-2 6] R. M[. Iverson, M. E. Reid and R. G. Lahusen, “Debris- Landslides,” Journals of Earth ol. 25, 1997, pp. 85-138. doi:10.1146/annurev.earth.25.1.85 flow Mobilization from and Planetary Sciences, V 10.1007/BF01262520 [7] D. Zhang and M. A. Foda, “An instability Mechanism for the Sliding Motion of Finite Depth of Bulk Granular Ma- terials,” Acta Mechanica, Vol. 121, No. 1-4, 1997, pp. 1-19. doi: ]J. Corominas, “The Angle of Reach as Mobility Index for rge Landslides,” Canadian Geotechnical , No. 2, 1996, pp. 260-271. [8 Small and La Journal, Vol. 33 doi:10.1139/t96-005 [9] Y. S. Fang and Z. Y. Zhang, “Kinematic Mechanism of Catastrophic Landslides and Prediction of Their Veloci- ties and Travelling Distance,” Landslides, Lausanne, 7 1988. [10] D. Rickenmann, “Empirical Relationships for Debris Flows,” Natural Hazards, Vol. 19, No. 1, 1999, pp. 47-77. doi:10.1023/A:100806422072 [11] A. E. Scheidegger, “On the Prediction of the Reach and Velocity of Catastrophic Landslides,” Rock Mechanics, Vol. 5, No. 4, 1973, pp. 231-236. doi:10.1007/BF01301796 [12] D. Zhang and M. A. Foda, “Internal Wave - Granular Temperature Interaction: An Energy Balance Study on Granular Flow,” Acta Mechanica, Vol. 136, No. 3-4, 1999, pp. 155-170. doi:10.1007/BF01179255 [13] N. Mitarai, H. Nakanishi, “Velocity Correlations in the doi:10.1098/rspa.1954.0186 Dense Granular Shear Flows: Effects on Energy Dissipa- tion and Normal Stress,” Physical Review E, Vol. 75, 2007. [14] R. A. Bagnold, “Experiments on a Gravity-Free Disper- sion of Large Solid Spheres in a Newtonian Fluid under Shear,” Proceeding of the Royal Society, Vol. 225, No. 1160, 1954, pp. 49-63. [15] B. Salm, “Contribution to Avalanche Dynamics,” in Copyright © 2011 SciRes. IJG 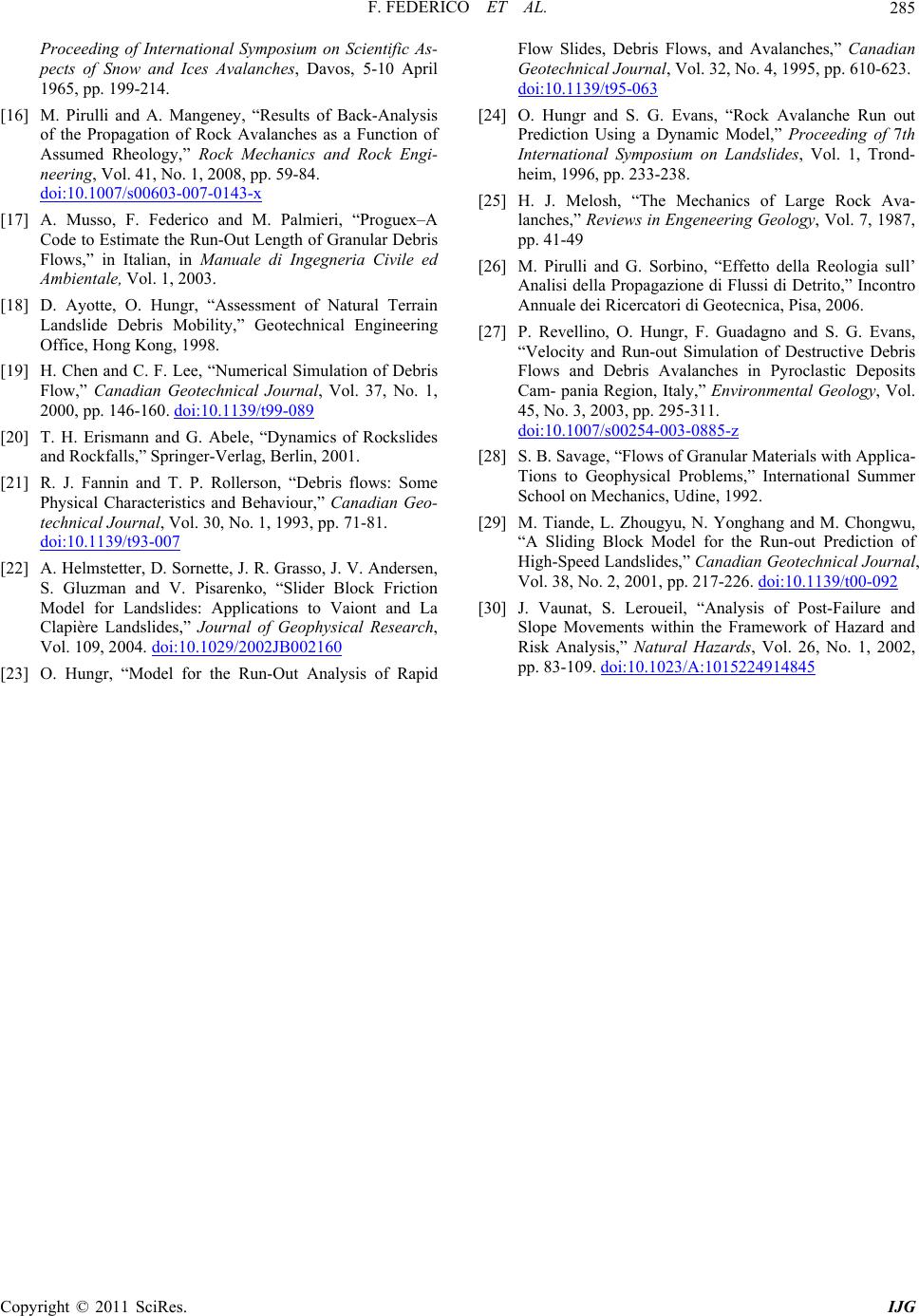 F. FEDERICO ET AL. Copyright © 2011 SciRes. IJG 285 April . 59-84. Proceeding of International Symposium on Scientific As- pects of Snow and Ices Avalanches, Davos, 5-10 1965, pp. 199-214. [16] M. Pirulli and A. Mangeney, “Results of Back-Analysis of the Propagation of Rock Avalanches as a Function of Assumed Rheology,” Rock Mechanics and Rock Engi- neering, Vol. 41, No. 1, 2008, pp doi:10.1007/s00603-007-0143-x [17] A. Musso, F. Federico and M. Palmieri, “Proguex–A Code to Estimate the Run-Out Length of Gra Flows,” in Italian, in nular Debris Manuale di Ingegneria Civile ed Hong Kong, 1998. 99-089 Ambientale, Vol. 1, 2003. [18] D. Ayotte, O. Hungr, “Assessment of Natural Terrain Landslide Debris Mobility,” Geotechnical Engineering Office, [19] H. Chen and C. F. Lee, “Numerical Simulation of Debris Flow,” Canadian Geotechnical Journal, Vol. 37, No. 1, 2000, pp. 146-160. doi:10.1139/t “Debris flows: Some d Behaviour,” Canadian Geo- [20] T. H. Erismann and G. Abele, “Dynamics of Rockslides and Rockfalls,” Springer-Verlag, Berlin, 2001. [21] R. J. Fannin and T. P. Rollerson, Physical Characteristics an technical Journal, Vol. 30, No. 1, 1993, pp. 71-81. doi:10.1139/t93-007 [22] A. Helmstetter, D. Sornette, J. R. Grasso, J. V. Andersen, S. Gluzman and V. Pisarenko, “Slider Block Friction Model for Landslides: Applications to Vaiont and La Clapière Landslides,” Journal of Geophysical Research, Vol. 109, 2004. doi:10.1029/2002JB002160 [23] O. Hungr, “Model for the Run-Out Analysis of Rapid 32, No. 4, 1995, pp. 610-623. Flow Slides, Debris Flows, and Avalanches,” Canadian Geotechnical Journal, Vol. doi:10.1139/t95-063 [24] O. Hungr and S. G. Evans, “Rock Avalanche Run out Prediction Using a Dynamic Model,” Proceeding of 7th rbino, “Effetto della Reologia sull’ tic Deposits International Symposium on Landslides, Vol. 1, Trond- heim, 1996, pp. 233-238. [25] H. J. Melosh, “The Mechanics of Large Rock Ava- lanches,” Reviews in Engeneering Geology, Vol. 7, 1987, pp. 41-49 [26] M. Pirulli and G. So Analisi della Propagazione di Flussi di Detrito,” Incontro Annuale dei Ricercatori di Geotecnica, Pisa, 2006. [27] P. Revellino, O. Hungr, F. Guadagno and S. G. Evans, “Velocity and Run-out Simulation of Destructive Debris Flows and Debris Avalanches in Pyroclas Cam- pania Region, Italy,” Environmental Geology, Vol. 45, No. 3, 2003, pp. 295-311. doi:10.1007/s00254-003-0885-z [28] S. B. Savage, “Flows of Granular Materials with Applica- for the Run-out Prediction of Tions to Geophysical Problems,” International Summer School on Mechanics, Udine, 1992. [29] M. Tiande, L. Zhougyu, N. Yonghang and M. Chongwu, “A Sliding Block Model High-Speed Landslides,” Canadian Geotechnical Journal, Vol. 38, No. 2, 2001, pp. 217-226. doi:10.1139/t00-092 [30] J. Vaunat, S. Leroueil, “Analysis of Post-Failure and Slope Movements within the Framework of Hazard and Risk Analysis,” Natural Hazards, Vol. 26, No. 1, 2002, pp. 83-109. doi:10.1023/A:1015224914845
|