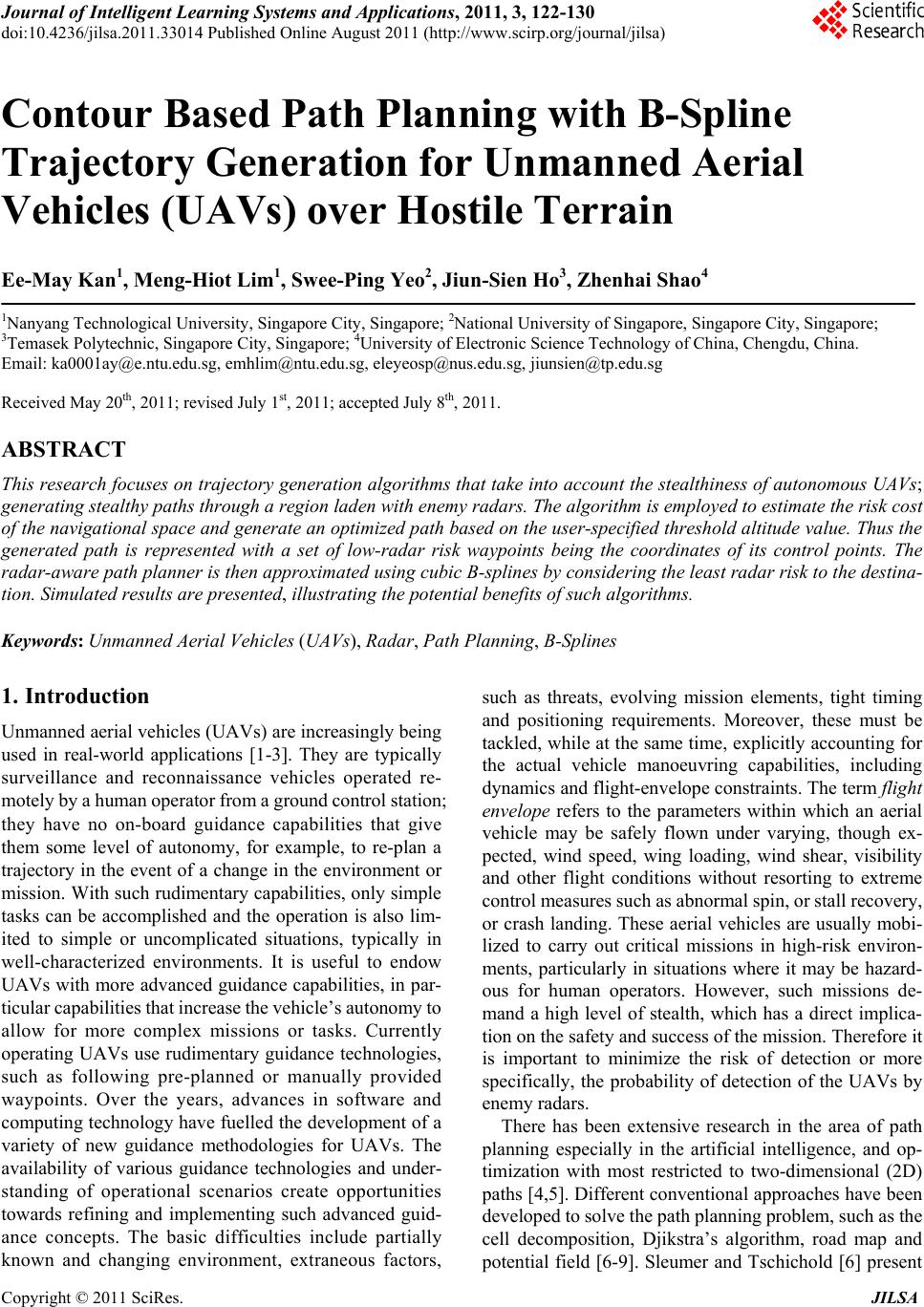
 Journal of Intelligent Learning Systems and Applications, 2011, 3, 122-130 doi:10.4236/jilsa.2011.33014 Published Online August 2011 (http://www.scirp.org/journal/jilsa) Copyright © 2011 SciRes. JILSA Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) over Hostile Terrain Ee-May Kan1, Meng-Hiot Lim1, Swee-Ping Yeo2, Jiu n-Sien Ho3, Zhenhai Shao4 1Nanyang Technological University, Singapore City, Singapore; 2National University of Singapore, Singapore City, Singapore; 3Temasek Polytechnic, Singapore City, Singapore; 4University of Electronic Science Technology of China, Chengdu, China. Email: ka0001ay@e.ntu.edu.sg, emhlim@ntu.edu.sg, eleyeosp@nus.edu.sg, jiunsien@tp.edu.sg Received May 20th, 2011; revised July 1st, 2011; accepted July 8th, 2011. ABSTRACT This research focuses on trajectory generation algorithms that take into account the stealthiness of autonomous UAVs; generating stealthy paths through a region laden with enemy radars. The algorithm is employed to estimate the risk cost of the navigational space and generate an optimized path based on the user-specified threshold altitude value. Thus the generated path is represented with a set of low-radar risk waypoints being the coordinates of its control points. The radar-aware path planner is then approximated using cubic B-splines by considering the least radar risk to the destina- tion. Simulated results are presented, illustrating the potential benefits of such algorithms. Keywords: Unmanned Aerial Vehicles (UAVs), Radar, Path Planning, B-Splines 1. Introduction Unmanned aerial vehicles (UAVs) are increasingly being used in real-world applications [1-3]. They are typically surveillance and reconnaissance vehicles operated re- motely by a human operator from a ground control station; they have no on-board guidance capabilities that give them some level of autonomy, for example, to re-plan a trajectory in the event of a change in the environment or mission. With such rudimentary capabilities, only simple tasks can be accomplished and the operation is also lim- ited to simple or uncomplicated situations, typically in well-characterized environments. It is useful to endow UAVs with more advanced guidance capabilities, in par- ticular capabilities that increase the vehicle’s autonomy to allow for more complex missions or tasks. Currently operating UAVs use rudimentary guidance technologies, such as following pre-planned or manually provided waypoints. Over the years, advances in software and computing technology have fuelled the development of a variety of new guidance methodologies for UAVs. The availability of various guidance technologies and under- standing of operational scenarios create opportunities towards refining and implementing such advanced guid- ance concepts. The basic difficulties include partially known and changing environment, extraneous factors, such as threats, evolving mission elements, tight timing and positioning requirements. Moreover, these must be tackled, while at the same time, explicitly accounting for the actual vehicle manoeuvring capabilities, including dynamics and flight-envelope constraints. The term flight envelope refers to the parameters within which an aerial vehicle may be safely flown under varying, though ex- pected, wind speed, wing loading, wind shear, visibility and other flight conditions without resorting to extreme control measures such as abnormal spin, or stall recovery, or crash landing. These aerial vehicles are usually mobi- lized to carry out critical missions in high-risk environ- ments, particularly in situations where it may be hazard- ous for human operators. However, such missions de- mand a high level of stealth, which has a direct implica- tion on the safety and success of the mission. Therefore it is important to minimize the risk of detection or more specifically, the probability of detection of the UAVs by enemy radars. There has been extensive research in the area of path planning especially in the artificial intelligence, and op- timization with most restricted to two-dimensional (2D) paths [4,5]. Different conventional approaches have been developed to solve the path planning problem, such as the cell decomposition, Djikstra’s algorithm, road map and potential field [6-9]. Sleumer and Tschichold [6] present  Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 123 over Hostile Terrain an algorithm for the automatic generation of a map that describes the operation environment of a building con- sisting of line segments, representing the walls as an input. The algorithm is based on the exact cell decomposition approach and generates a connectivity graph based on cell indices. However, for successful implementation of exact cell decomposition, it is required that the geometry of each cell be simple. Moreover, it is important to test the adjacency of two cells to find a path crossing the portion of the boundary shared by the two cells. Both exact cell decomposition and approximate cell decomposition methods are accurate, yet may be computationally ex- pensive when used in a terrain environment since nu- merous obstacles at varying elevations could be found. They are only effective when the environment contains a countable number of obstacles. Another technique used to effectively represent the al- ternate paths generated by a path planner is to use B- splines. B-splines allow a parametric curved path to be described by only a few control points rather than the entire curve segmented which could be as many as thou- sands of sections, depending on the length and curvature of the path. Recent methods include modelling the tra- jectory using splines based on elastic band theory [10,11], and interactive manipulation of control points for spline trajectory generation [12,13]. A series of cubic splines was employed in [14] to connect the straight line seg- ments in a near-optimal manner, whereas the algorithm presented in [15] yields extremal trajectories that transi- tion between straight-line path segments smoothly in a time-optimal fashion. Previous efforts [16,17] have concentrated on path planning over a hostile radar zonesbased on the amount of energy received by enemy radar at several locations. In this paper, we investigate on the number and place- ment of control points within a hostile region by consid- ering the complexity of the terrain. We take into account the path optimality within a hostile region by considering the complexity of the terrain. We propose an efficient algorithm to identify the waypoints based on the topog- raphic information of the enemy terrain. The waypoint generation process is based on the user-specified thresh- old flying altitude. The threshold altitude to avoid radar detection and terrain collisions is determined based on the knowledge of the enemy terrain. The navigational path between the waypoints is considered when mini- mizing the exposure to a radar source. Additionally, the generated trajectory is of minimal length, subject to the stealthy constraint and satisfies the aircraft’s dynamic constraints. Details on the formulation of the problem are presented in this paper. We model this problem as described in the following section and adopt a heuristic-based approach to solve it. The rest of this paper is organized as follows: Section 2 gives a description of the problem model used for measuring stealth in this work and illustrates the cal- culation of the radar risks. Section 3 demonstrates the details of the problem formulation and Section 4 presents the solution approach of the route planner, substantiated with simulated results. The conclusion and future work are presented in Section 5. 2. Modelling In this section, the model we used throughout this work is presented. The integrated model of the UAV and radar has the following features. The Radar Cross Section (RCS) of the UAV depends on both the aspect and bank angles whereas the turn rate of the UAV is determined by its bank angle. Hence, the RCS and aircraft dynamics are coupled through the aspect and bank angles. 2.1. Measuring Stealth Based on Aircraft Model The bank-to-turn aircraft is assumed to move in a hori- zontal plane at a constant altitude according to the equa- tions [18], cos v , sinyv , u v , uU (1) where and are the Cartesian coordinates of the aircraft, y is the heading angle as shown in Figure 1, is the constant speed, is the input signal and the acceleration is normal to the flight path vector, followed by is the maximum allowable lateral acceleration. Figures 2 and 3 show the dependence of RCS on aspect and bank angles. vu U Let 22 arctan, π, arctan y x z xy (2) Figure 1. Aircraft position, velocity, azimuth, heading, and aspect angles. Copyright © 2011 SciRes. JILSA 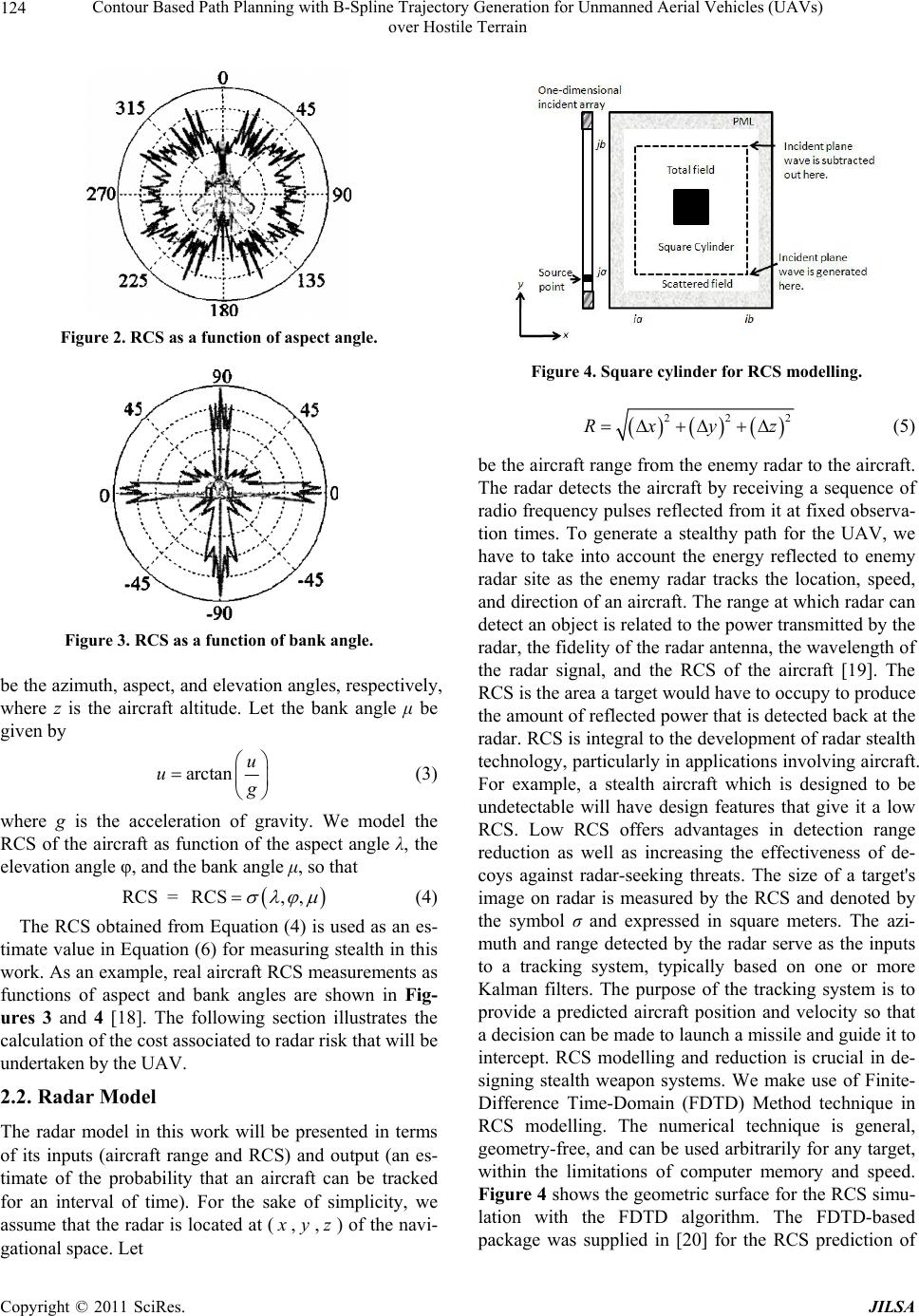 Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 124 over Hostile Terrain Figure 2. RCS as a function of aspect angle. Figure 3. RCS as a function of bank angle. be the azimuth, aspect, and elevation angles, respectively, where z is the aircraft altitude. Let the bank angle μ be given by arctan u u (3) where g is the acceleration of gravity. We model the RCS of the aircraft as function of the aspect angle λ, the elevation angle φ, and the bank angle μ, so that RCS = RCS, , (4) The RCS obtained from Equation (4) is used as an es- timate value in Equation (6) for measuring stealth in this work. As an example, real aircraft RCS measurements as functions of aspect and bank angles are shown in Fig- ures 3 and 4 [18]. The following section illustrates the calculation of the cost associated to radar risk that will be undertaken by the UAV. 2.2. Radar Model The radar model in this work will be presented in terms of its inputs (aircraft range and RCS) and output (an es- timate of the probability that an aircraft can be tracked for an interval of time). For the sake of simplicity, we assume that the radar is located at ( ,, ) of the navi- gational space. Let y z Figure 4. Square cylinder for RCS modelling. 22 Rxyz 2 (5) be the aircraft range from the enemy radar to the aircraft. The radar detects the aircraft by receiving a sequence of radio frequency pulses reflected from it at fixed observa- tion times. To generate a stealthy path for the UAV, we have to take into account the energy reflected to enemy radar site as the enemy radar tracks the location, speed, and direction of an aircraft. The range at which radar can detect an object is related to the power transmitted by the radar, the fidelity of the radar antenna, the wavelength of the radar signal, and the RCS of the aircraft [19]. The RCS is the area a target would have to occupy to produce the amount of reflected power that is detected back at the radar. RCS is integral to the development of radar stealth technology, particularly in applications involving aircraft. For example, a stealth aircraft which is designed to be undetectable will have design features that give it a low RCS. Low RCS offers advantages in detection range reduction as well as increasing the effectiveness of de- coys against radar-seeking threats. The size of a target's image on radar is measured by the RCS and denoted by the symbol σ and expressed in square meters. The azi- muth and range detected by the radar serve as the inputs to a tracking system, typically based on one or more Kalman filters. The purpose of the tracking system is to provide a predicted aircraft position and velocity so that a decision can be made to launch a missile and guide it to intercept. RCS modelling and reduction is crucial in de- signing stealth weapon systems. We make use of Finite- Difference Time-Domain (FDTD) Method technique in RCS modelling. The numerical technique is general, geometry-free, and can be used arbitrarily for any target, within the limitations of computer memory and speed. Figure 4 shows the geometric surface for the RCS simu- lation with the FDTD algorithm. The FDTD-based package was supplied in [20] for the RCS prediction of C opyright © 2011 SciRes. JILSA 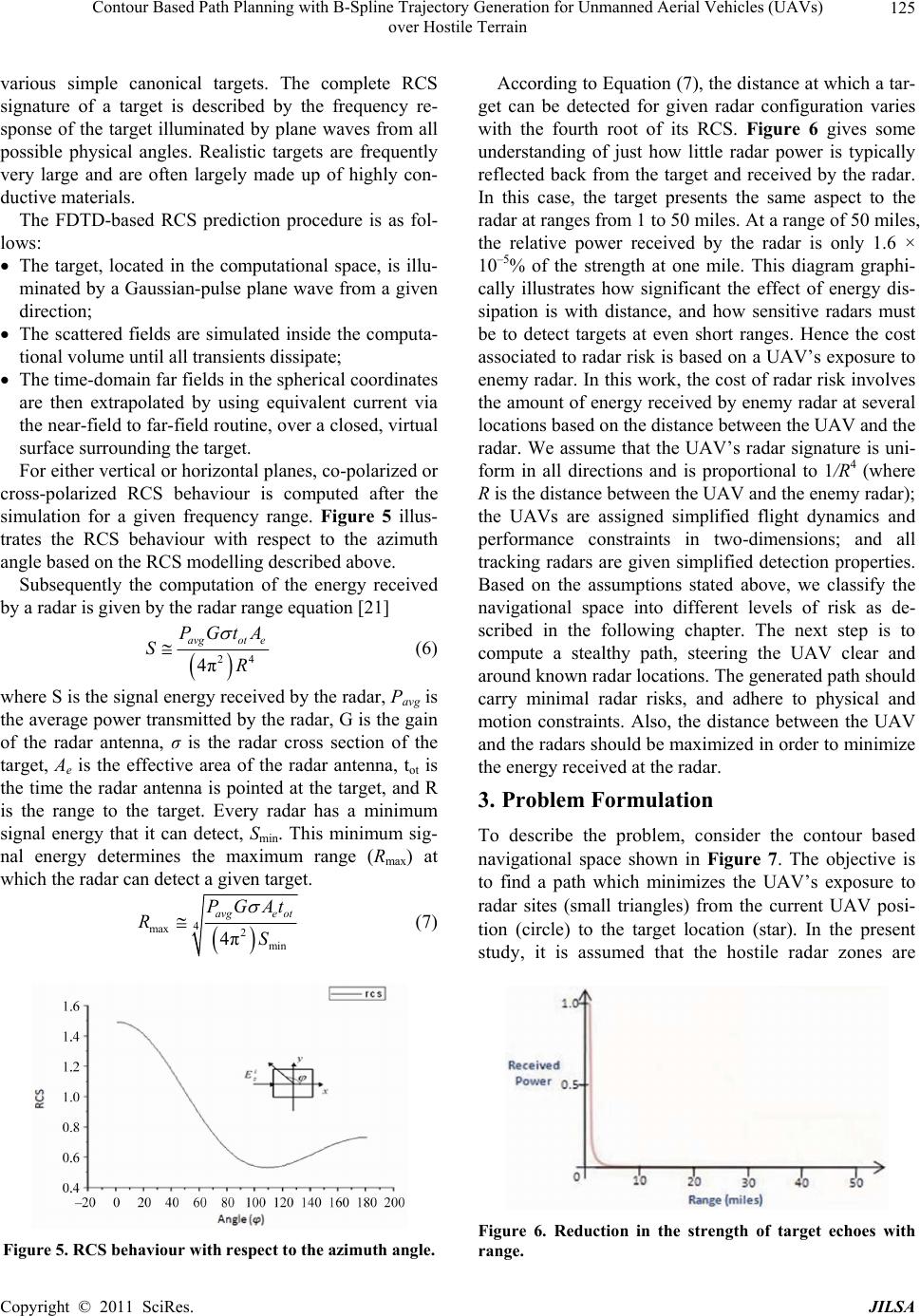 Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 125 over Hostile Terrain various simple canonical targets. The complete RCS signature of a target is described by the frequency re- sponse of the target illuminated by plane waves from all possible physical angles. Realistic targets are frequently very large and are often largely made up of highly con- ductive materials. The FDTD-based RCS prediction procedure is as fol- lows: The target, located in the computational space, is illu- minated by a Gaussian-pulse plane wave from a given direction; The scattered fields are simulated inside the computa- tional volume until all transients dissipate; The time-domain far fields in the spherical coordinates are then extrapolated by using equivalent current via the near-field to far-field routine, over a closed, virtual surface surrounding the target. For either vertical or horizontal planes, co-polarized or cross-polarized RCS behaviour is computed after the simulation for a given frequency range. Figure 5 illus- trates the RCS behaviour with respect to the azimuth angle based on the RCS modelling described above. Subsequently the computation of the energy received by a radar is given by the radar range equation [21] 24 4π avgot e PGtA SR (6) where S is the signal energy received by the radar, Pavg is the average power transmitted by the radar, G is the gain of the radar antenna, σ is the radar cross section of the target, Ae is the effective area of the radar antenna, tot is the time the radar antenna is pointed at the target, and R is the range to the target. Every radar has a minimum signal energy that it can detect, Smin. This minimum sig- nal energy determines the maximum range (Rmax) at which the radar can detect a given target. 4 max 2 min 4π avge ot PGAt RS (7) Figure 5. RCS behaviour with respect to the azimuth angle. According to Equation (7), the distance at which a tar- get can be detected for given radar configuration varies with the fourth root of its RCS. Figure 6 gives some understanding of just how little radar power is typically reflected back from the target and received by the radar. In this case, the target presents the same aspect to the radar at ranges from 1 to 50 miles. At a range of 50 miles, the relative power received by the radar is only 1.6 × 10–5% of the strength at one mile. This diagram graphi- cally illustrates how significant the effect of energy dis- sipation is with distance, and how sensitive radars must be to detect targets at even short ranges. Hence the cost associated to radar risk is based on a UAV’s exposure to enemy radar. In this work, the cost of radar risk involves the amount of energy received by enemy radar at several locations based on the distance between the UAV and the radar. We assume that the UAV’s radar signature is uni- form in all directions and is proportional to 1/R4 (where R is the distance between the UAV and the enemy radar); the UAVs are assigned simplified flight dynamics and performance constraints in two-dimensions; and all tracking radars are given simplified detection properties. Based on the assumptions stated above, we classify the navigational space into different levels of risk as de- scribed in the following chapter. The next step is to compute a stealthy path, steering the UAV clear and around known radar locations. The generated path should carry minimal radar risks, and adhere to physical and motion constraints. Also, the distance between the UAV and the radars should be maximized in order to minimize the energy received at the radar. 3. Problem Formulation To describe the problem, consider the contour based navigational space shown in Figure 7. The objective is to find a path which minimizes the UAV’s exposure to radar sites (small triangles) from the current UAV posi- tion (circle) to the target location (star). In the present study, it is assumed that the hostile radar zones are Figure 6. Reduction in the strength of target echoes with range. Copyright © 2011 SciRes. JILSA 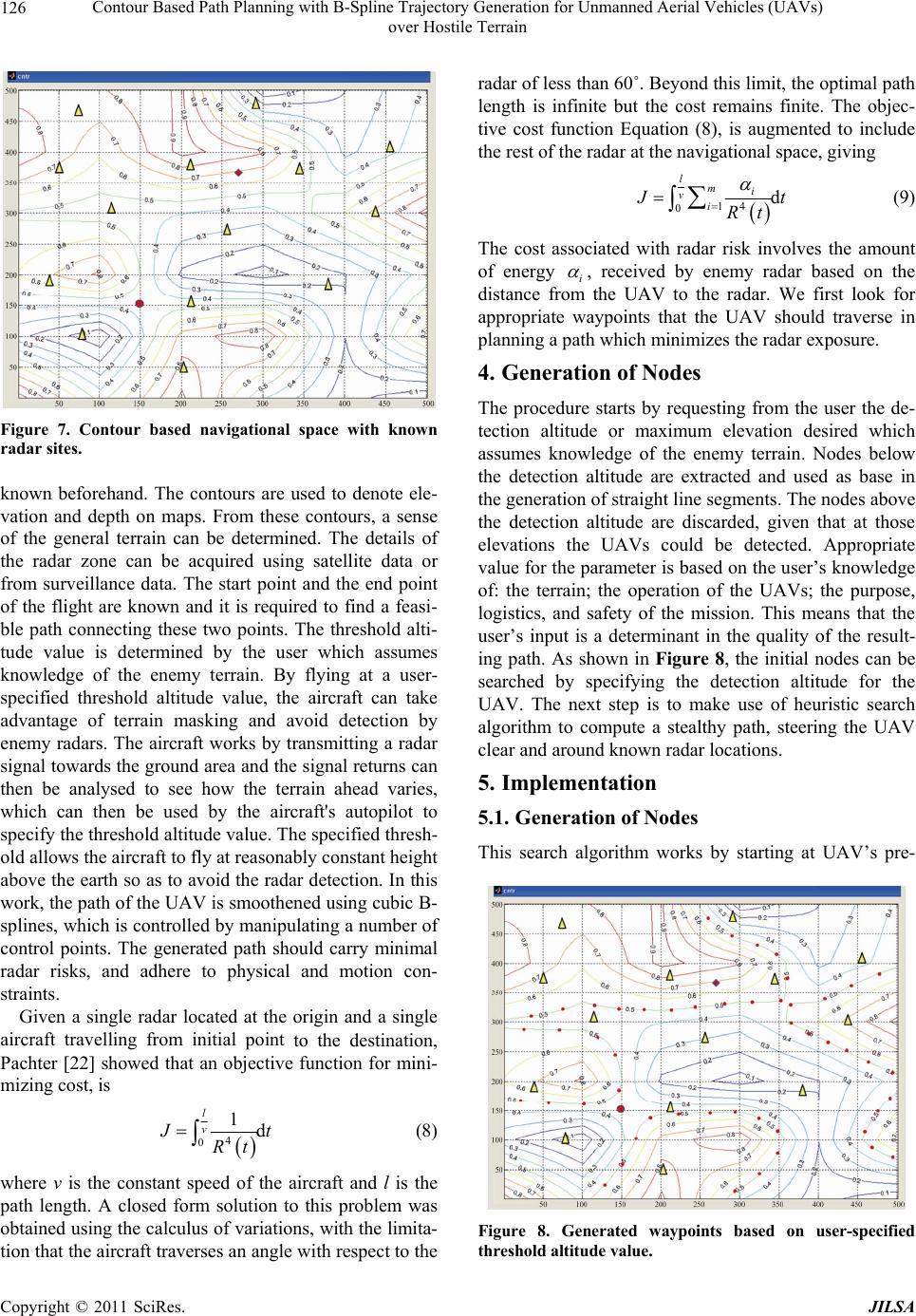 Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 126 over Hostile Terrain Figure 7. Contour based navigational space with known radar sites. known beforehand. The contours are used to denote ele- vation and depth on maps. From these contours, a sense of the general terrain can be determined. The details of the radar zone can be acquired using satellite data or from surveillance data. The start point and the end point of the flight are known and it is required to find a feasi- ble path connecting these two points. The threshold alti- tude value is determined by the user which assumes knowledge of the enemy terrain. By flying at a user- specified threshold altitude value, the aircraft can take advantage of terrain masking and avoid detection by enemy radars. The aircraft works by transmitting a radar signal towards the ground area and the signal returns can then be analysed to see how the terrain ahead varies, which can then be used by the aircraft's autopilot to specify the threshold altitude value. The specified thresh- old allows the aircraft to fly at reasonably constant height above the earth so as to avoid the radar detection. In this work, the path of the UAV is smoothened using cubic B- splines, which is controlled by manipulating a number of control points. The generated path should carry minimal radar risks, and adhere to physical and motion con- straints. Given a single radar located at the origin and a single aircraft travelling from initial point to the destination, Pachter [22] showed that an objective function for mini- mizing cost, is 4 0 1d l v t Rt (8) where v is the constant speed of the aircraft and l is the path length. A closed form solution to this problem was obtained using the calculus of variations, with the limita- tion that the aircraft traverses an angle with respect to the radar of less than 60˚. Beyond this limit, the optimal path length is infinite but the cost remains finite. The objec- tive cost function Equation (8), is augmented to include the rest of the radar at the navigational space, giving 4 1 0d lmi v i t Rt (9) The cost associated with radar risk involves the amount of energy i , received by enemy radar based on the distance from the UAV to the radar. We first look for appropriate waypoints that the UAV should traverse in planning a path which minimizes the radar exposure. 4. Generation of Nodes The procedure starts by requesting from the user the de- tection altitude or maximum elevation desired which assumes knowledge of the enemy terrain. Nodes below the detection altitude are extracted and used as base in the generation of straight line segments. The nodes above the detection altitude are discarded, given that at those elevations the UAVs could be detected. Appropriate value for the parameter is based on the user’s knowledge of: the terrain; the operation of the UAVs; the purpose, logistics, and safety of the mission. This means that the user’s input is a determinant in the quality of the result- ing path. As shown in Figure 8, the initial nodes can be searched by specifying the detection altitude for the UAV. The next step is to make use of heuristic search algorithm to compute a stealthy path, steering the UAV clear and around known radar locations. 5. Implementation 5.1. Generation of Nodes This search algorithm works by starting at UAV’s pre- Figure 8. Generated waypoints based on user-specified threshold altitude value. C opyright © 2011 SciRes. JILSA  Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 127 over Hostile Terrain sent position (red circle). It adds the heuristic function value and determines the expansion order of nodes. We make use of a distance-plus-cost heuristic function, f(n) to determine the order in which the search visits nodes in the space. We assume that the UAV’s radar signature is uniform in all directions and is proportional to 1/R4 where R is the aircraft range. We modify the evaluation function by adding the cost associated with radar risk to the f(n) as follows: 4 0 1mi i i c fnwgnw hnR (10) where w is a value in the range [0, 1]; g(n) is the path- cost function which shows the intensity between the cur- rent node and node n; h(n) is the distance value which is estimated from node n to the goal node; ci is relative to Ri and m is the number of enemy radars located at the navigational space. The h(n) plays a significant role in the search process when w value is smaller; the number of vertices to be explored would be decreased. The choice of w between 0 and 1 gives the flexibility to place weight on exposure to threats or fuel expenditure de- pending on the particular mission scenario. For example when w = 0, the search process would proceed from the starting location to the target location by exploring the least number of vertices. However the generated path is not stealthy and may cause UAV to enter high radar risk region. A w value closer to 0 would result in the shortest paths, with little regard for the exposure to enemy radar, while a value closer to 1 would result in paths that avoid threat exposure at the expense of longer path length. For this case, the cost weighting parameter w was chosen to give a reasonable tradeoff between proximity of the path to threats and the path length. The evaluation function, (10) is tested empirically and compared in terms of the number of nodes visited. During the test, the cost weighting parameter w is varied from 0.0 to 1.0 and the test result is demonstrated in Table 1. The experimen- tally defined value for the w ranges from [0.1, 0.3] in which the generated path is optimal and computationally inexpensive, which is in line with our algorithm objec- tives. The generated path is neither the safest possible path nor the shortest possible path, but represents a com- promise between the two objectives. The algorithm traverses various paths from the starting location to the goal. At the same time, it compares the risk cost of all the vertices. Starting with the initial node, it maintains a priority queue of nodes to be traversed, known as the openQueue (see Listing 1). The lower f(n) for a given node n, the higher its priority. At each step of the algorithm, the node with the lowest f(n) value is re- moved from the queue, the f and h values of its neighbors Table 1. Test results. Cost Weighting Pa- rameter, w Explored Nodes Cost of the Generated Path w is not used 2405 103 0 385 117.5 0.1 369 112.5 0.2 365 110.5 0.3 365 106.5 0.4 468 104 0.5 2405 103 0.6 4975 101 0.7 7073 100.5 0.8 7521 99 0.9 7766 97 1.0 8085 97 The algorithm traverses various paths from the starting location to the goal. At the same time, it compares the risk cost of all the vertices. Starting with the initial node, it maintains a priority queue of nodes to be traversed, known as the openQueue (see Listing 1). The lower f(n) for a given node n, the higher its priority. At each step of the algorithm, the node with the lowest f(n) value is re- moved from the queue, the f and h values of its neighbors are updated accordingly, and these neighbors with the least radar cost are added to the openQueue. The condi- tions of adding a node to the openQueue are as follows: The node is not in high radar risk region; The node is movable and does not exist in the open- Queue; The distance between the starting point and the current node is shorter than the earlier estimated distance; The distance between the starting point and the current node does not violate the pre-specified detection alti- tude. If the four conditions are satisfied, then the current node will be added to the openQueue. The algorithm continues until a goal node has a lower f value than any node in the queue. If the actual optimal path is desired, the algorithm may also update each neighbor with its immediate predecessor in the best path found so far; this information can then be used to reconstruct the path by working backwards from the goal node. The output of this stage is a set of straight line segments connecting a subset of the nodes resulting from the waypoint genera- tion process, as long as the link does not violate the pre-specified detection altitude. The path planning algo- rithm is implemented in a MATLAB environment and a sample of the result can be seen in Figure 9. The pseudo-code for the algorithm is as shown in Listing 1. The next step is to modify the generated path by using a series of cubic splines to optimize the path by moving away from high radar risks and improving the navigabil- ity of the path for the UAV. Copyright © 2011 SciRes. JILSA 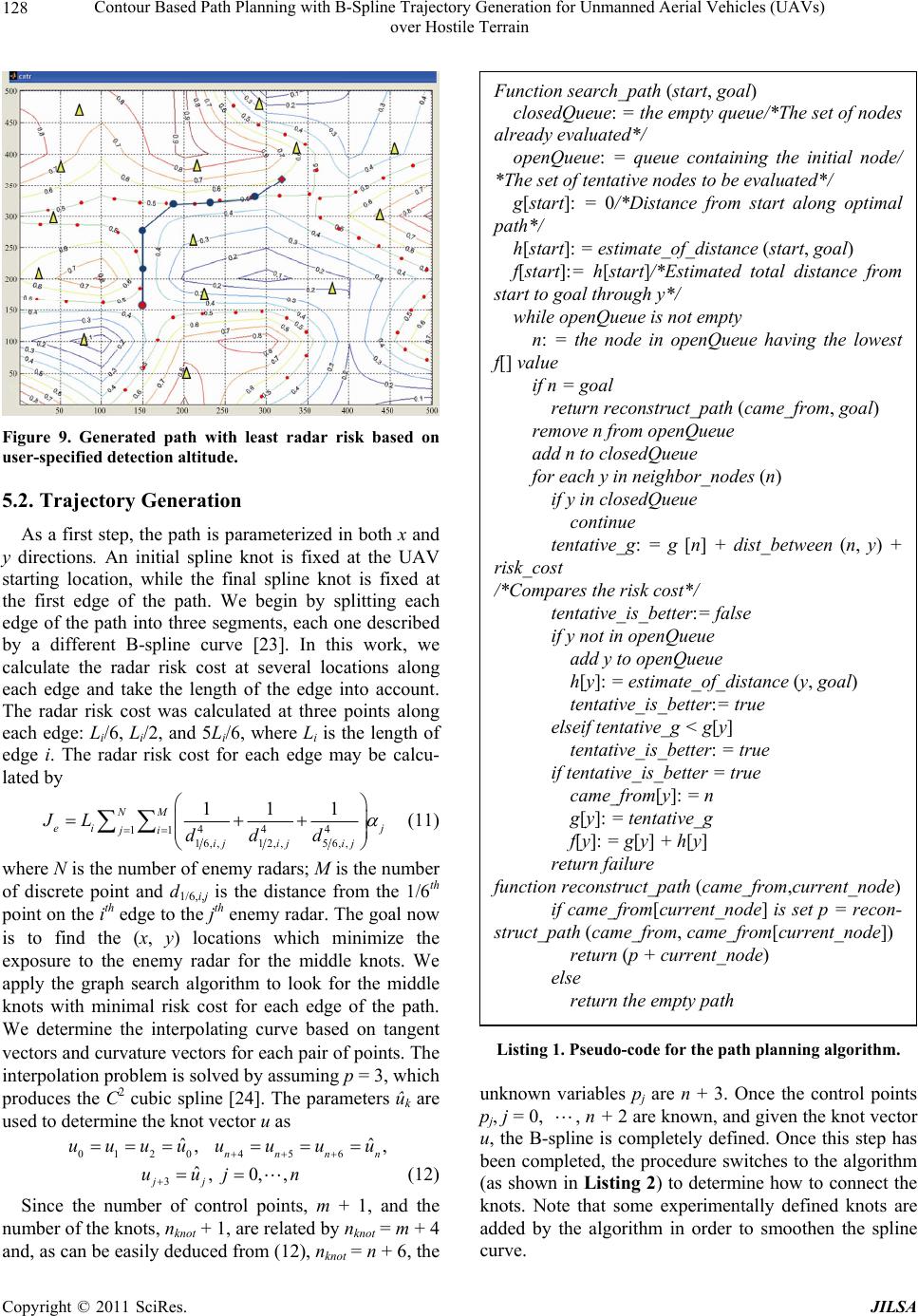 Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 128 over Hostile Terrain Figure 9. Generated path with least radar risk based on user-specified detection altitude. 5.2. Trajectory Generation As a first step, the path is parameterized in both x and y directions. An initial spline knot is fixed at the UAV starting location, while the final spline knot is fixed at the first edge of the path. We begin by splitting each edge of the path into three segments, each one described by a different B-spline curve [23]. In this work, we calculate the radar risk cost at several locations along each edge and take the length of the edge into account. The radar risk cost was calculated at three points along each edge: Li/6, Li/2, and 5Li/6, where Li is the length of edge i. The radar risk cost for each edge may be calcu- lated by 444 11 16,, 12,, 56,, 111 NM ei ji ij ijij JL ddd j (11) where N is the number of enemy radars; M is the number of discrete point and d1/6,i,j is the distance from the 1/6th point on the ith edge to the jth enemy radar. The goal now is to find the (x, y) locations which minimize the exposure to the enemy radar for the middle knots. We apply the graph search algorithm to look for the middle knots with minimal risk cost for each edge of the path. We determine the interpolating curve based on tangent vectors and curvature vectors for each pair of points. The interpolation problem is solved by assuming p = 3, which produces the C2 cubic spline [24]. The parameters ûk are used to determine the knot vector u as 0120 ˆ,uuuu 3ˆ jj uu 456 ˆ, nnn uuuu ,0, ,jn n (12) Since the number of control points, m + 1, and the number of the knots, nknot + 1, are related by nknot = m + 4 and, as can be easily deduced from (12), nknot = n + 6, the Function search_path (start, goal) closedQueue: = the empty queue/*The set of nodes already evaluated*/ openQueue: = queue containing the initial node/ *The set of tentative nodes to be evaluated*/ g[start]: = 0/*Distance from start along optimal path*/ h[start]: = estimate_of_distance (start, goal) f[start]:= h[start]/*Estimated total distance from start to goal through y*/ while openQueue is not empty n: = the node in openQueue having the lowest f[] value if n = goal return reconstruct_path (came_from, goal) remove n from openQueue add n to closedQueue for each y in neighbor_nodes (n) if y in closedQueue continue tentative_g: = g [n] + dist_between (n, y) + risk_cost /*Compares the risk cost*/ tentative_is_better:= false if y not in openQueue add y to openQueue h[y]: = estimate_of_distance (y, goal) tentative_is_better:= true elseif tentative_g < g[y] tentative_is_better: = true if tentative_is_better = true came_from[y]: = n g[y]: = tentative_g f[y]: = g[y] + h[y] return failure function reconstruct_path (came_from,current_node) if came_from[current_node ] is set p = recon- struct_path (came_from, came_from[current_node]) return (p + current_node) else return the empty path Listing 1. Pseudo-code for the path planning algorithm. unknown variables pj are n + 3. Once the control points pj, j = 0, , n + 2 are known, and given the knot vector u, the B-spline is completely defined. Once this step has been completed, the procedure switches to the algorithm (as shown in List ing 2) to determine how to connect the knots. Note that some experimentally defined knots are added by the algorithm in order to smoothen the spline curve. C opyright © 2011 SciRes. JILSA 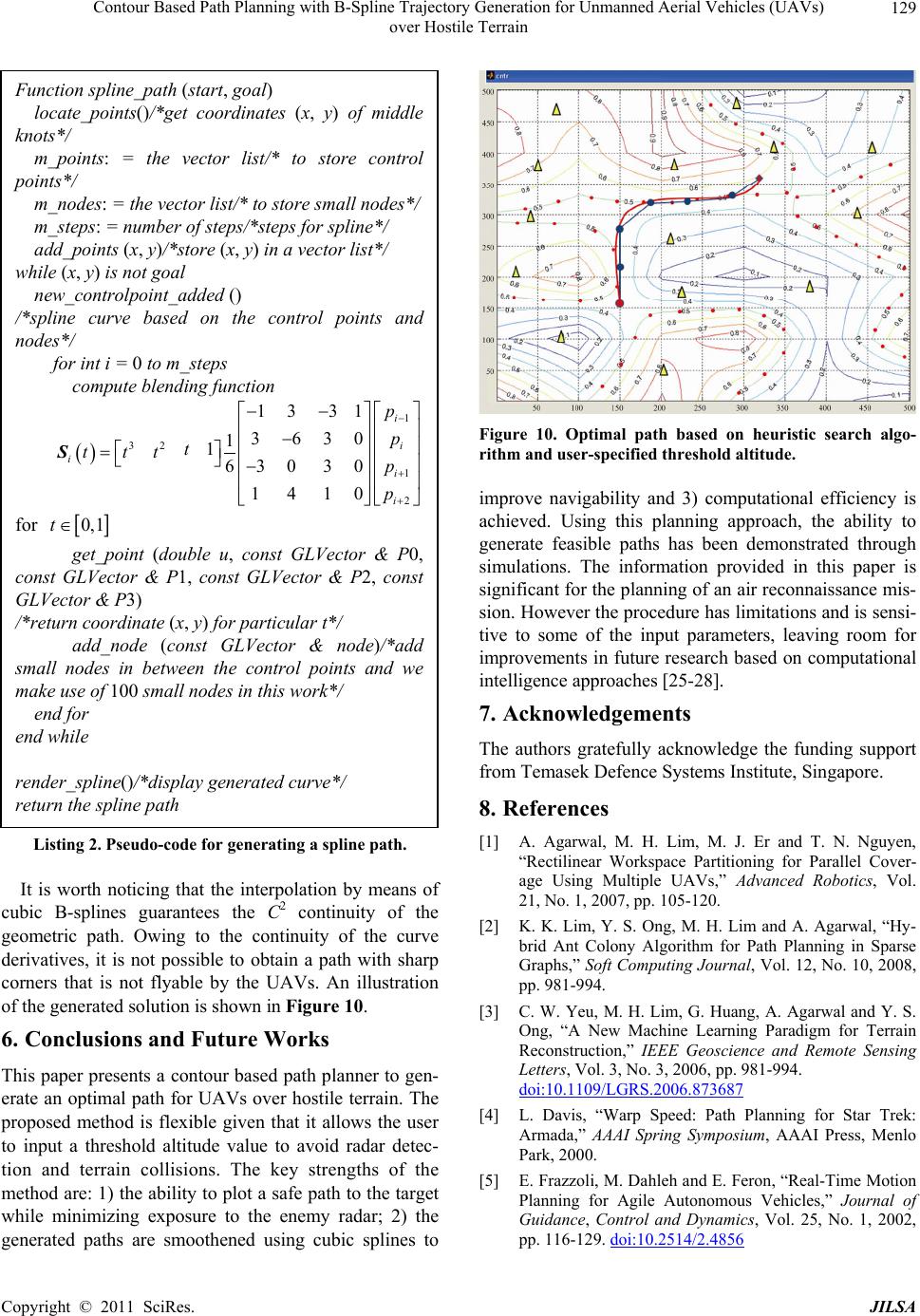 Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) 129 over Hostile Terrain Listing 2. Pseudo-code for generating a spline path. It is worth noticing that the interpolation by means of cubic B-splines guarantees the C2 continuity of the geometric path. Owing to the continuity of the curve derivatives, it is not possible to obtain a path with sharp corners that is not flyable by the UAVs. An illustration of the generated solution is shown in Figure 10. 6. Conclusions and Future Works This paper presents a contour based path planner to gen- erate an optimal path for UAVs over hostile terrain. The proposed method is flexible given that it allows the user to input a threshold altitude value to avoid radar detec- tion and terrain collisions. The key strengths of the method are: 1) the ability to plot a safe path to the target while minimizing exposure to the enemy radar; 2) the generated paths are smoothened using cubic splines to Figure 10. Optimal path based on heuristic search algo- rithm and user-specified threshold altitude. improve navigability and 3) computational efficiency is achieved. Using this planning approach, the ability to generate feasible paths has been demonstrated through simulations. The information provided in this paper is significant for the planning of an air reconnaissance mis- sion. However the procedure has limitations and is sensi- tive to some of the input parameters, leaving room for improvements in future research based on computational intelligence approaches [25-28]. 7. Acknowledgements The authors gratefully acknowledge the funding support from Temasek Defence Systems Institute, Singapore. 8. References Function spline_path (start, goal) locate_points()/*get coordinates (x, y) of middle knots*/ m_points: = the vector list/* to store control points*/ m_nodes: = the vector list/* to store small nodes*/ m_steps: = number of steps/*steps for spline*/ add_points (x, y)/*store (x, y) in a vector list*/ while (x, y) is not goal new_controlpoint_added () /*spline curve based on the control points and nodes*/ for int i = 0 to m_steps compute blending function 1 32 1 2 13 31 3630 1 130 30 6 1410 i i i i i p p t tttp p S for 0, 1t get_point (double u, const GLVector & P0, const GLVector & P1, const GLVector & P2, const GLVector & P3) /*return coordinate (x, y) for particular t*/ add_node (const GLVector & node)/*add small nodes in between the control points and we make use of 100 small nodes in this work*/ end for end while render_spline()/*display generated curve*/ return the spline path [1] A. Agarwal, M. H. Lim, M. J. Er and T. N. Nguyen, “Rectilinear Workspace Partitioning for Parallel Cover- age Using Multiple UAVs,” Advanced Robotics, Vol. 21, No. 1, 2007, pp. 105-120. [2] K. K. Lim, Y. S. Ong, M. H. Lim and A. Agarwal, “Hy- brid Ant Colony Algorithm for Path Planning in Sparse Graphs,” Soft Computing Journal, Vol. 12, No. 10, 2008, pp. 981-994. [3] C. W. Yeu, M. H. Lim, G. Huang, A. Agarwal and Y. S. Ong, “A New Machine Learning Paradigm for Terrain Reconstruction,” IEEE Geoscience and Remote Sensing Letters, Vol. 3, No. 3, 2006, pp. 981-994. doi:10.1109/LGRS.2006.873687 [4] L. Davis, “Warp Speed: Path Planning for Star Trek: Armada,” AAAI Spring Symposium, AAAI Press, Menlo Park, 2000. [5] E. Frazzoli, M. Dahleh and E. Feron, “Real-Time Motion Planning for Agile Autonomous Vehicles,” Journal of Guidance, Control and Dynamics, Vol. 25, No. 1, 2002, pp. 116-129. doi:10.2514/2.4856 Copyright © 2011 SciRes. JILSA  Contour Based Path Planning with B-Spline Trajectory Generation for Unmanned Aerial Vehicles (UAVs) over Hostile Terrain Copyright © 2011 SciRes. JILSA 130 [6] N. H. Sleumer and N. Tschichold-Gürman, “Exact Cell Decomposition of Arrangements Used for Path Planning in Robotics,” Technical Reports 329, ETH Zürich, Insti- tute of Theoretical Computer Science, 1999. [7] J. C. Latombe, “Robot Motion Planning,” Kulwer Aca- demic Publishers, Boston, 1991. [8] T. Lozano-Pyrez and M. A. Wesley, “An Algorithm for Planning Collision-Free Paths among Polyhedral Obsta- cles,” Communications of the ACM, Vo1. 22, No. 10, 1979, pp. 565-570. [9] M. Jun, “Path Planning for Unmanned Aerial Vehicles in Uncertain and Adversarial Environments,” In: S. Butenko, R. Murphey and P. Pardalos, Eds., Cooperative Control: Models, Applicarions and Algorithms, Kluwer, 2003, pp. 95-111. [10] J. Hilgert, K. Hirsch, T. Bertram and M. Hiller, “Emer- gency Path Planning for AutonomousVehicles Using Elastic Band Theory,” Advanced Intelligent Mechatronics, Vol. 2, 2003, pp. 1390-1395. [11] T. Sattel and T. Brandt, “Ground Vehicle Guidance Along Collision-Free Trajectories Using Elastic Bands,” Proceedings of 2005 American Control Conference, Port- la, 2005, pp. 4991-4999. [12] J. Hwang, R. C. Arkin and D. Kwon, “Mobile Robots at Your Fingertip: Bezier Curve On-Line Trajectory Gen- eration for Supervisory Control,” Proceedings of Intelli- gent Robots and Systems (IROS 2003), Las Vegas, Vol. 2, 2003, pp. 1444-1449. [13] J. Aleotti, S. Caselli and G. Maccherozzi, “Trajectory Reconstruction with NURBS Curves for Robot Pro- gramming by Demonstration,” Proceedings of Computa- tional Intelligence in Robotics and Automation, Barce- lona, 2005, pp. 73-78. [14] K. B. Judd and T. W. McLain, “Spline Based Path Plan- ning for Unmanned Air Vehicles,” AIAA Guidance, Navigation, and Control Conference and Exhibit, Mont- real, 2001. [15] E. P. Anderson, R. W. Beard, and T. W. McLain, “Real- Time Dynamic Trajectory Smoothing for Unmanned Air Vehicles,” IEEE Transactions on Control Systems Tech- nology, Vol. 13, No. 3, 2005, pp. 471-477. doi:10.1109/TCST.2004.839555 [16] E. M. Kan, M. H. Lim, S. P. Yeo, S. H. Shao and J. S. Ho, “Radar Aware Path Planning for UAVs,” IEEE Sympo- sium on Intelligent Systems and Applications, Trabzon, June 2009. [17] E. M. Kan, S. P. Yeo, C. S.Tan, S. H. Shao and J. S. Ho, “Stealth Path Planning for UAVs in Hostile Radar Zones,” Proceedings of the 11th IASTED International Conference on Control and Applications, Cambridge, July 2009, pp. 54-60. [18] F. W. Moore, “Radar Cross-Section Reduction via Route Planning and Intelligent Control,” IEEE Transactions on Control Systems Technology, Vol. 10, No. 5, 2002, pp. 696-700. doi:10.1109/TCST.2002.801879 [19] U. F. Knott, “Radar Cross Section Measurements,” Van Nostrand Reinhold, New York, 1993. [20] L. Sevgi, “Complex Electromagnetic Problems and Nu- merical Simulation Approaches,” IEEE Press/John Wiley & Sons, New York, 2003. [21] E. F. Knott, J. F. Shaeffer, and M. T. Tuley, “Radar Cross Section,” 2nd Edition, Artech House, Norwood, 1993, p. 231. [22] M. Pachter, D. R. Jacques and J. M. Hebert, “Minimizing Radar Exposure in Air Vehicle Path Planning,” Proceed- ings of the 41st Israel Annual Conference on Aerospace Sciences, Tel-Aviv, February 2001. [23] M. G. Cox, “The Numerical Evaluation of B-Splines,” IMA Journal of Applied Mathematics, Vol. 10, No. 2, 1972, pp. 134-149. doi:10.1093/imamat/10.2.134 [24] R. H. Bartels, J. C. Beatty and B. A. Barsky, “An Intro- duction to Splines for Use in Computer Graphics and Geometric Modeling,” Morgan Kaufmann Publishers, Massachusetts, 1987. [25] Q. Cao, M. H. Lim, J. H. Li, Y. S. Ong and W. L. Ng, “A Context Switchable Fuzzy Inference Chip,” IEEE Trans- actions on Fuzzy Systems, Vol. 14, No. 4, 2006, pp. 552- 567. doi:10.1109/TFUZZ.2006.876735 [26] M. H. Lim and Y Takefuji, “Implementing Fuzzy Rule- Based Systems on Silicon Chips,” IEEE Expert, Vol. 5, No. 1, 1990, pp. 31-45. doi:10.1109/64.50855 [27] R. Meuth, M. H. Lim, Y. S. Ong and D. C. Wunsh, “A Proposition on Memes and Meta-Memes in Computing for Higher-Order Learning,” Memetic Computing, Vol. 1, No. 2, 2009, pp. 85-100. doi:10.1007/s12293-009-0011-1 [28] M. H. Lim, Q. Cao, J. H. Li and W. L. Ng, “Evolvable Hardware Using Context Switchable Fuzzy Inference Processor,” IEEE Proceedings: Computers and Digital Techniques, Vol. 151, No. 4, 2004, pp. 301-311. doi:10.1049/ip-cdt:20040666
|