B. HAMED ET AL.
Copyright © 2011 SciRes. ICA
240
7. References control the speed of DC motor due to its advantages over
the traditional PID controller. The control scheme was
modeled and designed in VHDL. It was simulated and
synthesized using the Xilinx Foundation package and
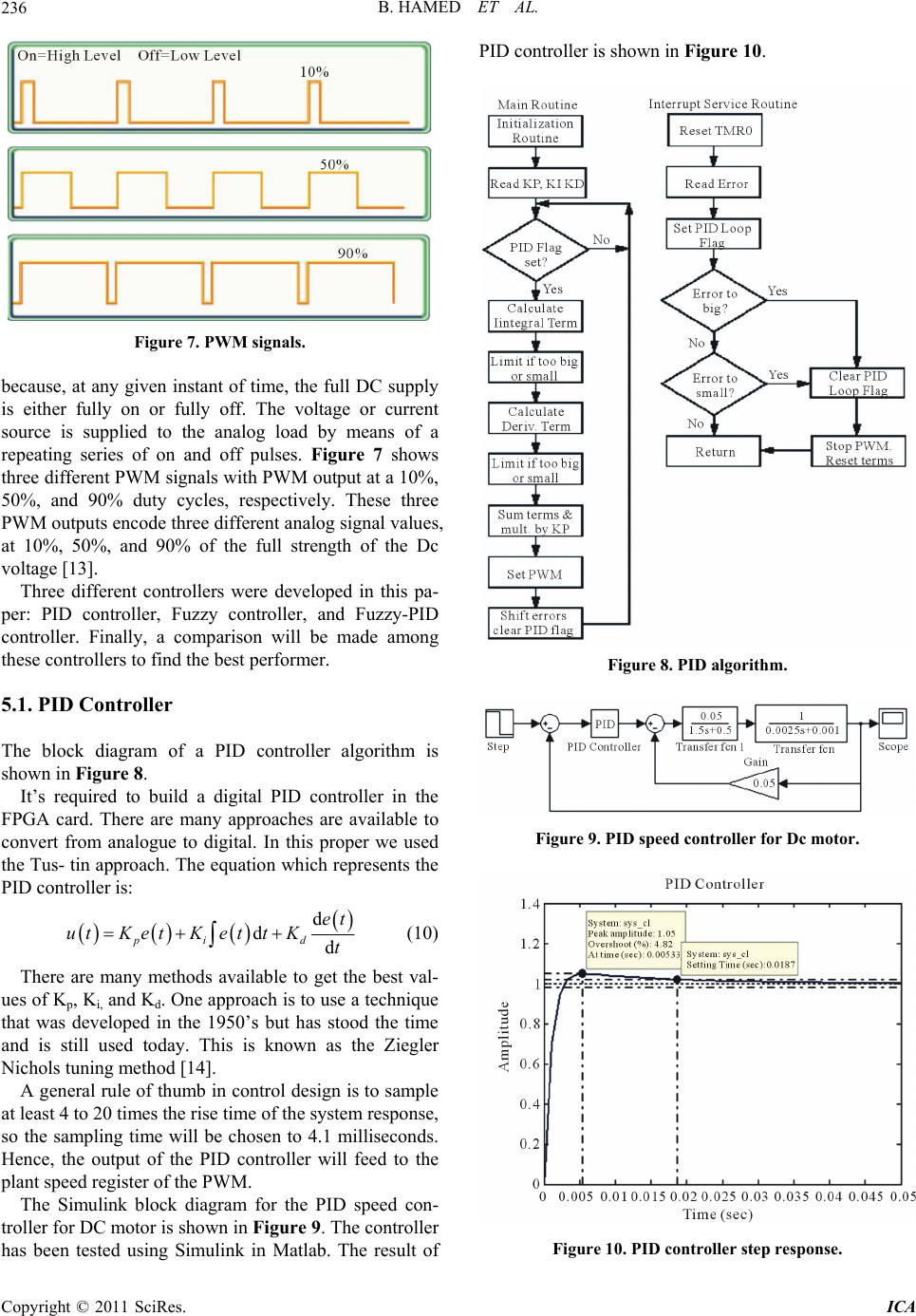
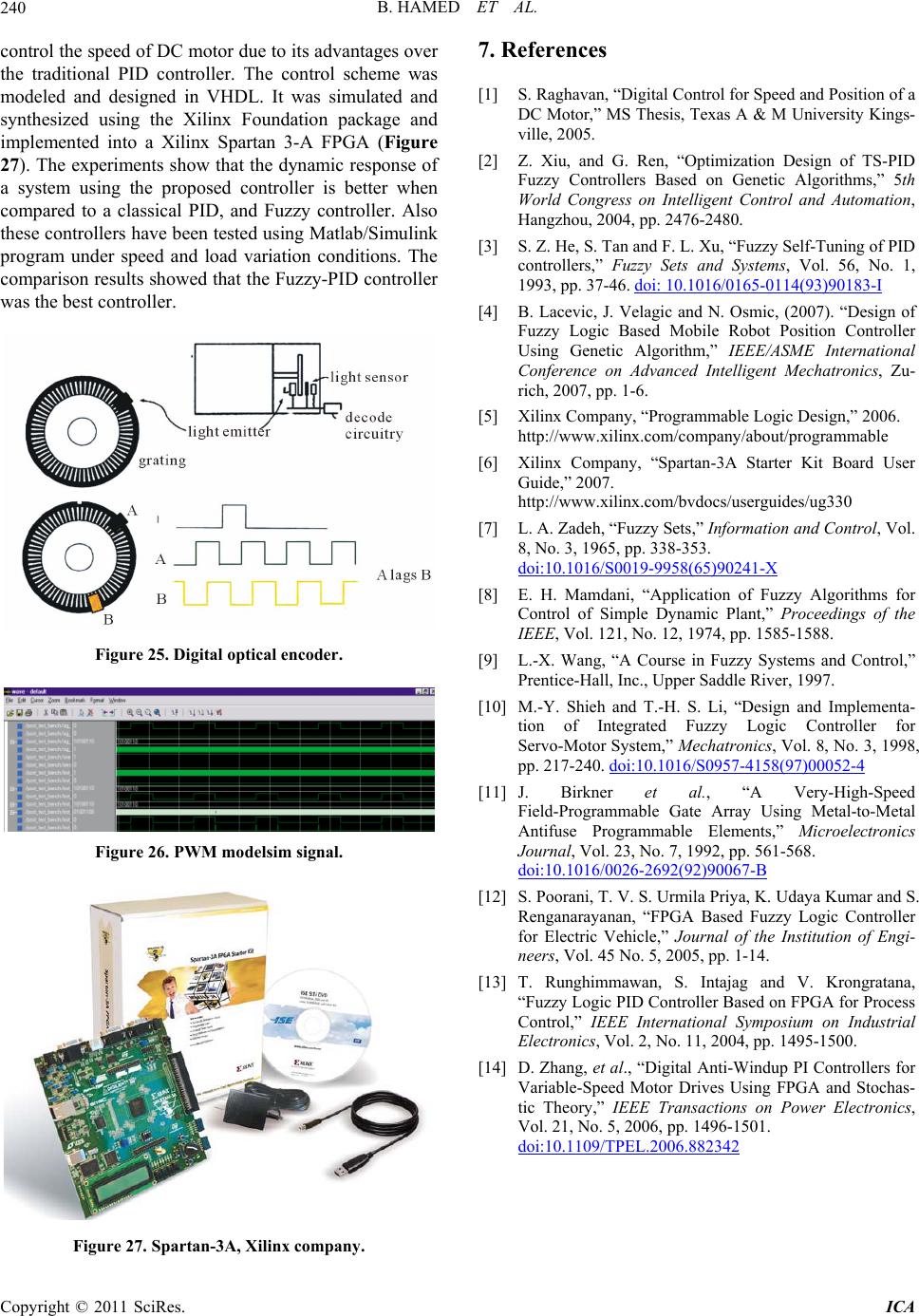
implemented into a Xilinx Spartan 3-A FPGA (Figure
27). The experiments show that the dynamic response of
a system using the proposed controller is better when
compared to a classical PID, and Fuzzy controller. Also
these controllers have been tested using Matlab/Simulink
program under speed and load variation conditions. The
comparison results showed that the Fuzzy-PID controller
was the best controller.
[1] S. Raghavan, “Digital Control for Speed and Position of a
DC Motor,” MS Thesis, Texas A & M University Kings-
ville, 2005.
[2] Z. Xiu, and G. Ren, “Optimization Design of TS-PID
Fuzzy Controllers Based on Genetic Algorithms,” 5th
World Congress on Intelligent Control and Automation,
Hangzhou, 2004, pp. 2476-2480.
[3] S. Z. He, S. Tan and F. L. Xu, “Fuzzy Self-Tuning of PID
controllers,” Fuzzy Sets and Systems, Vol. 56, No. 1,
1993, pp. 37-46. doi: 10.1016/0165-0114(93)90183-I
[4] B. Lacevic, J. Velagic and N. Osmic, (2007). “Design of
Fuzzy Logic Based Mobile Robot Position Controller
Using Genetic Algorithm,” IEEE/ASME International
Conference on Advanced Intelligent Mechatronics, Zu-
rich, 2007, pp. 1-6.
[5] Xilinx Company, “Programmable Logic Design,” 2006.
http://www.xilinx.com/company/about/programmable
[6] Xilinx Company, “Spartan-3A Starter Kit Board User
Guide,” 2007.
http://www.xilinx.com/bvdocs/userguides/ug330
[7] L. A. Zadeh, “Fuzzy Sets,” Information and Control, Vol.
8, No. 3, 1965, pp. 338-353.
doi:10.1016/S0019-9958(65)90241-X
[8] E. H. Mamdani, “Application of Fuzzy Algorithms for
Control of Simple Dynamic Plant,” Proceedings of the
IEEE, Vol. 121, No. 12, 1974, pp. 1585-1588.
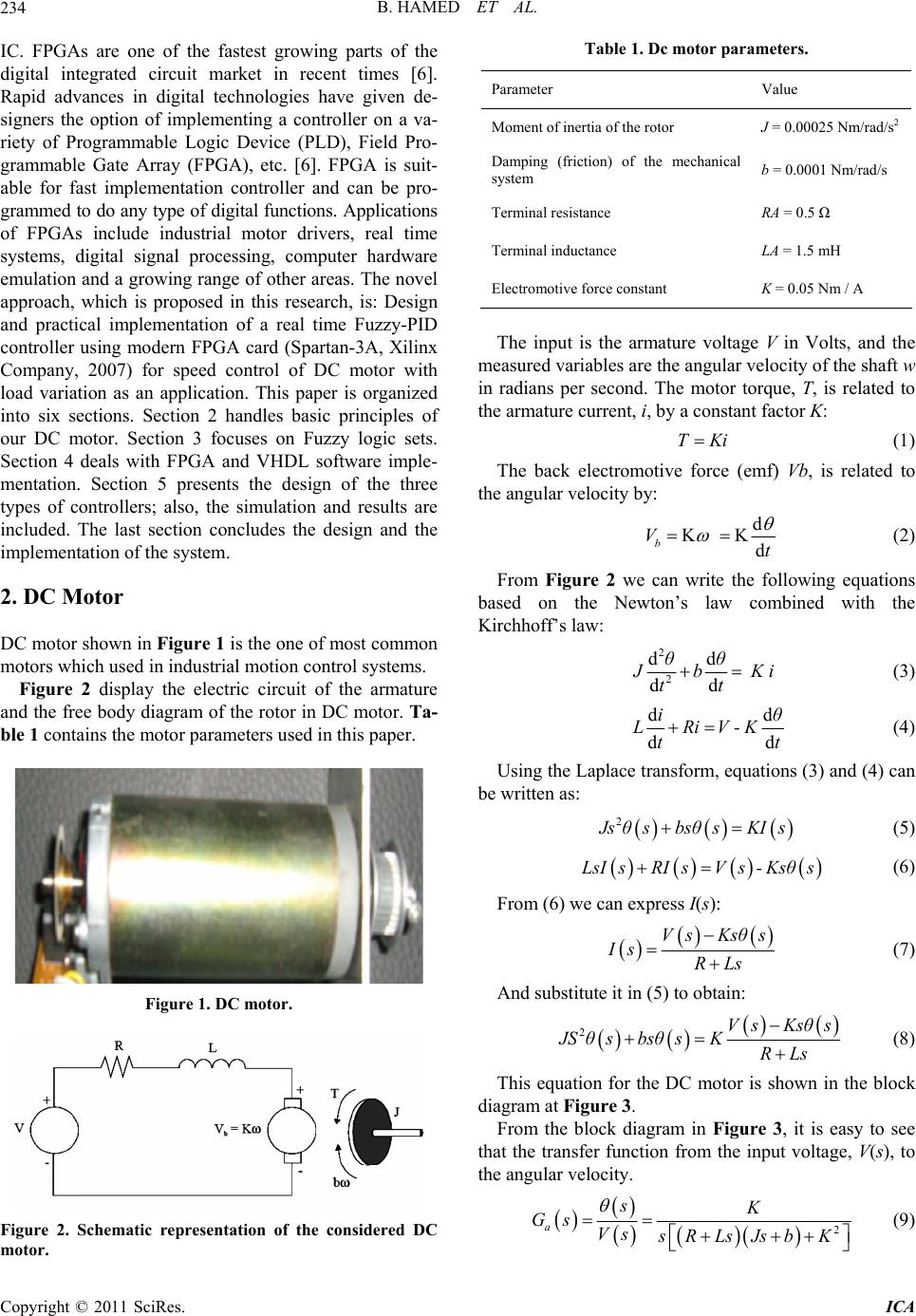
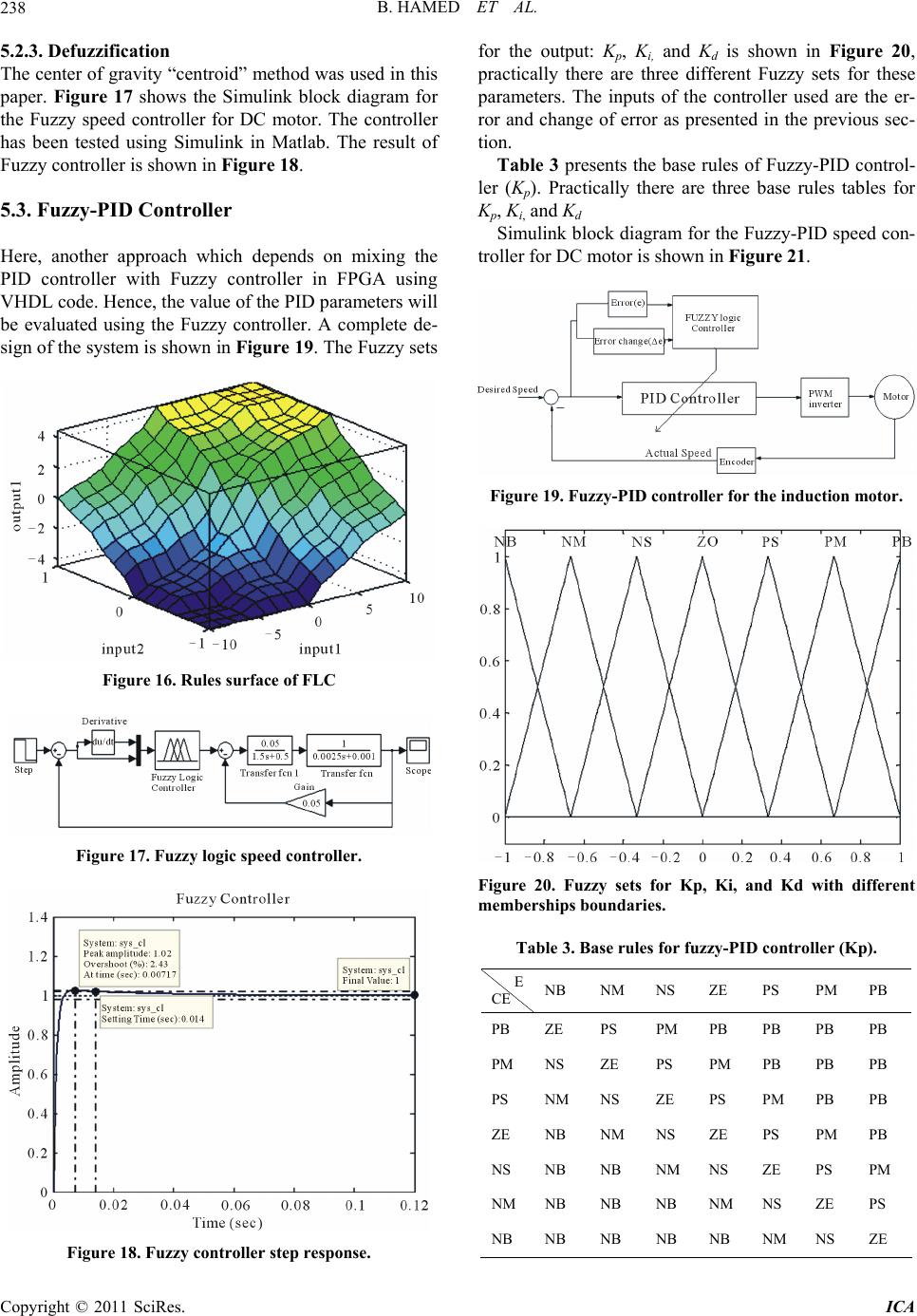
Figure 25. Digital optical encoder. [9] L.-X. Wang, “A Course in Fuzzy Systems and Control,”
Prentice-Hall, Inc., Upper Saddle River, 1997.
[10] M.-Y. Shieh and T.-H. S. Li, “Design and Implementa-
tion of Integrated Fuzzy Logic Controller for
Servo-Motor System,” Mechatronics, Vol. 8, No. 3, 1998,
pp. 217-240. doi:10.1016/S0957-4158(97)00052-4
, 1992, pp. 561-568.
[11] J. Birkner et al., “A Very-High-Speed
Field-Programmable Gate Array Using Metal-to-Metal
Antifuse Programmable Elements,” Microelectronics
Journal, Vol. 23, No. 7
doi:10.1016/0026-2692(92)90067-B
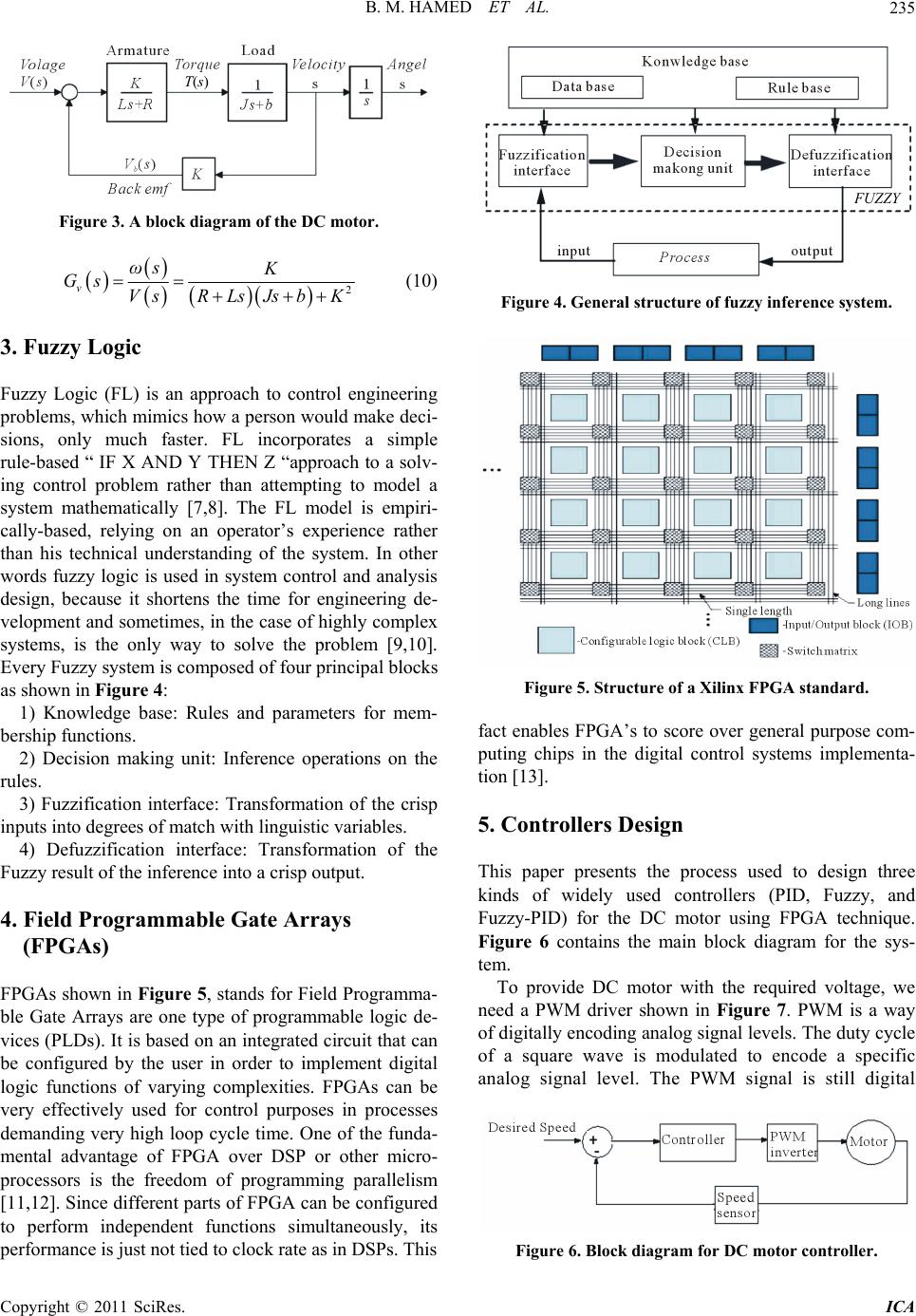
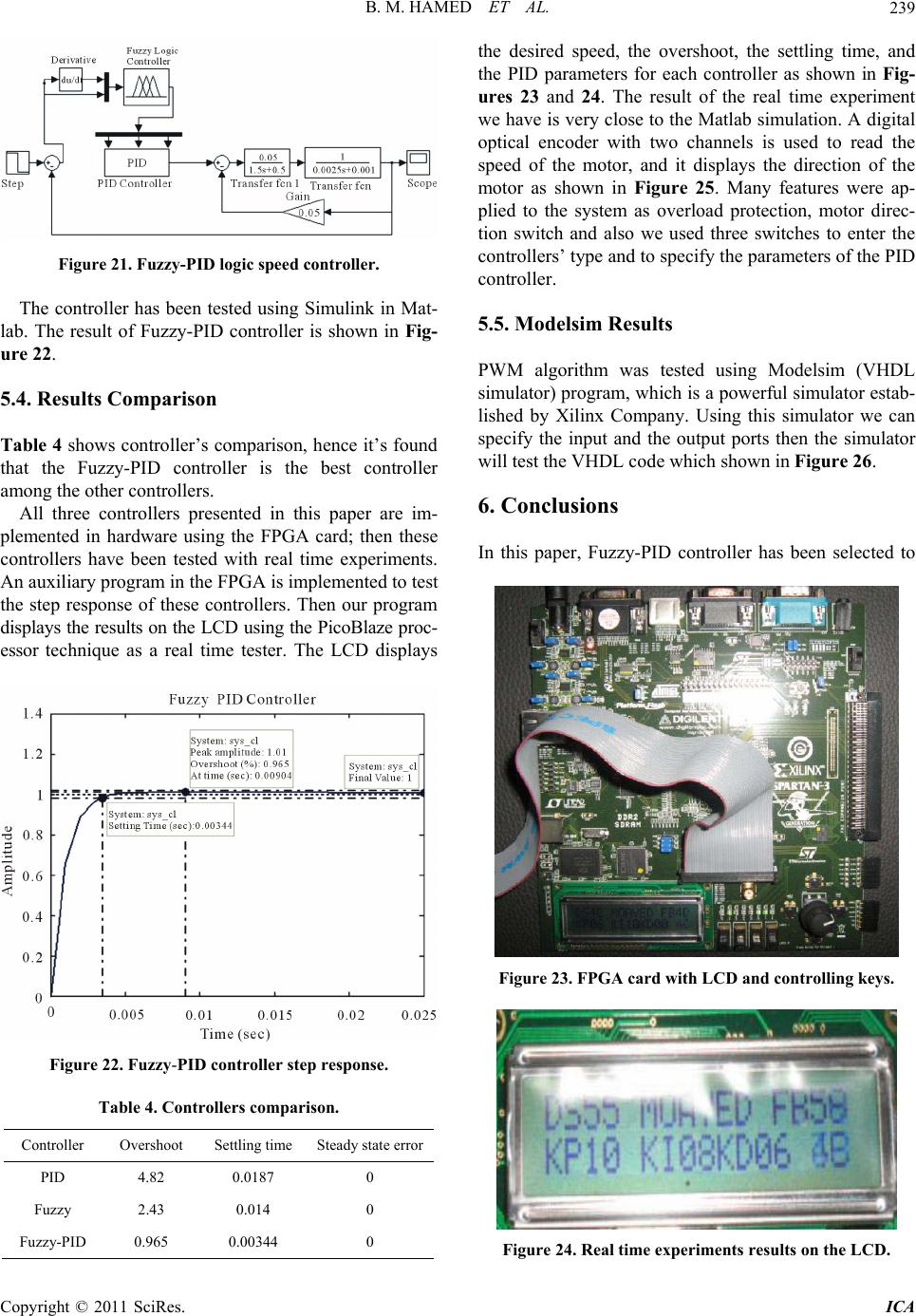
Figure 26. PWM modelsim signal.
[12] S. Poorani, T. V. S. Urmila Priya, K. Udaya Kumar and S.
Renganarayanan, “FPGA Based Fuzzy Logic Controller
for Electric Vehicle,” Journal of the Institution of Engi-
neers, Vol. 45 No. 5, 2005, pp. 1-14.
[13] T. Runghimmawan, S. Intajag and V. Krongratana,
“Fuzzy Logic PID Controller Based on FPGA for Process
Control,” IEEE International Symposium on Industrial
Electronics, Vol. 2, No. 11, 2004, pp. 1495-1500.
[14] D. Zhang, et al., “Digital Anti-Windup PI Controllers for
Variable-Speed Motor Drives Using FPGA and Stochas-
tic Theory,” IEEE Transactions on Power Electronics,
Vol. 21, No. 5, 2006, pp. 1496-1501.
doi:10.1109/TPEL.2006.882342
Figure 27. Spartan-3A, Xilinx company.