A. SHAHMANSOORIAN
Copyright © 2011 SciRes. ICA
183
fx gxu
(4)
where
R is the state space vector, is the
control input vector and
uR
,
xgx R are smooth.
The question is, “when can the system (1) be stabi-
lized at by a smooth feedback control law?”
0x
It is clear that when the unforced system is GAS, then
the problem is solved. But when the unforced system is
unstable or locally stable, the problem depends on the
roots of the equation . In the next section all
possible situations by using numerical examples will be
presented.
0gx
3. Examples
Example 1:
Consider the following nonlinear system,
31
xx
u (5)
The equation has a root at
0gx1
, but the
unforced system is stable. Thus this system can be stabi-
lized by a continuous control law.
Example 2:
Consider the following nonlinear system,
21
xx
u (6)
Although the equation has a root at
0gx1
,
the unforced system solutions with initial states
converge to the origin.
00x
Hence this system can be stabilized by a continuous
control law.
Example 3:
Consider the following nonlinear system,
31
xx
u (7)
The equation has a root at
0gx1
but the
unforced system solutions with initial states
00x
escape to infinity. For that reason the system can not be
stabilized by a continuous control law.
Example 4:
Consider the following nonlinear system,
22
1
xx
u (8)
The equation
0gx has roots at 1
and
. For the root
1x 1
x
the argument is as example 2,
but for the initial states
00
the unforced system
solutions escape to infinity. Because of that the system
can not be stabilized by a continuous control law.
Example 5:
Consider the following nonlinear system,
32
xxu
(9)
The unforced system is unstable, and the equation
0gx
has the root 0x
. This system can be stabi-
lized by a smooth control law (i.e. ). Actually
when the equation
2u x
0gx
has only the root 0x
,
the system can be stabilized by a control law which is
smooth everywhere except possibly at
0x
Example 6:
Consider the following nonlinear system,
23
xxu
(10)
This system can not be stabilized by a smooth control
law. Nevertheless, this system can be stabilized by a
control law, which is continuous at every nonzero
and is right-continuous at . The control law,
0x
2
11
0
0 0
Sgn xxx
uxx
(11)
globally asymptotically stabilizes the system and this
control law is right-continuous at .
0x
The reason is that the unforced system solution with
initial states
00x is stable.
Example 7:
Consider the following nonlinear system,
2
14
xx xu
(12)
The equation
0gx
has the root . The un-
forced system is unstable, but with the initial states
0x
10x0
0x
the unforced system solutions converge
to the origin. Therefore the system can be stabilized by a
control law, which is continuous at every nonzero x, and
at
is left continuous.
4. The Existence of WCLF
Actually the single input system (1) when the unforced
system is not stable and the equation has real
nonzero root(s) has not CLF and has only WCLF. The
existence of WCLF is not the sufficient condition for the
existence of a globally asymptotic stabilizing control law
which is continuous everywhere except possibly at
0gx
0x
. Furthermore using WCLF in Sontag’s formula
generates a (possibly nonsmooth) control law, which
guarantees asymptotic stability-globally asymptotic sta-
bility need to more investigation.
Example 8:
Consider the following second order nonlinear system,
32
12 1121
3
2122
2
xxxxx
xxxxu
u
2
(13)
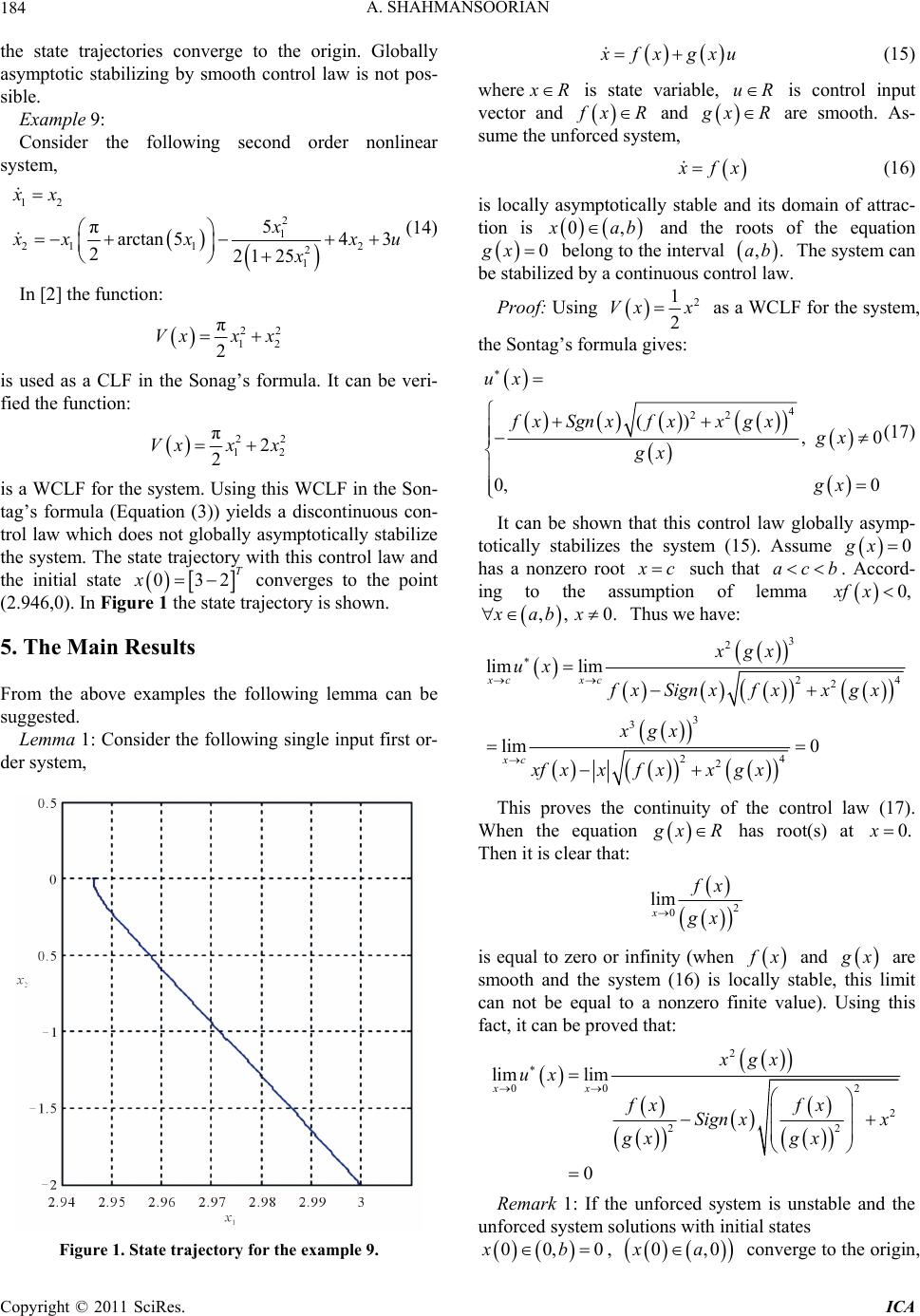
It can be proved that the function 2
is a
WCLF for the system. With all initial states interior the
circle
2
1
Vxx x
22
12
1xx
and a smooth stabilizing control law,