S. K. Shanmugam et al.
4. Conclusion
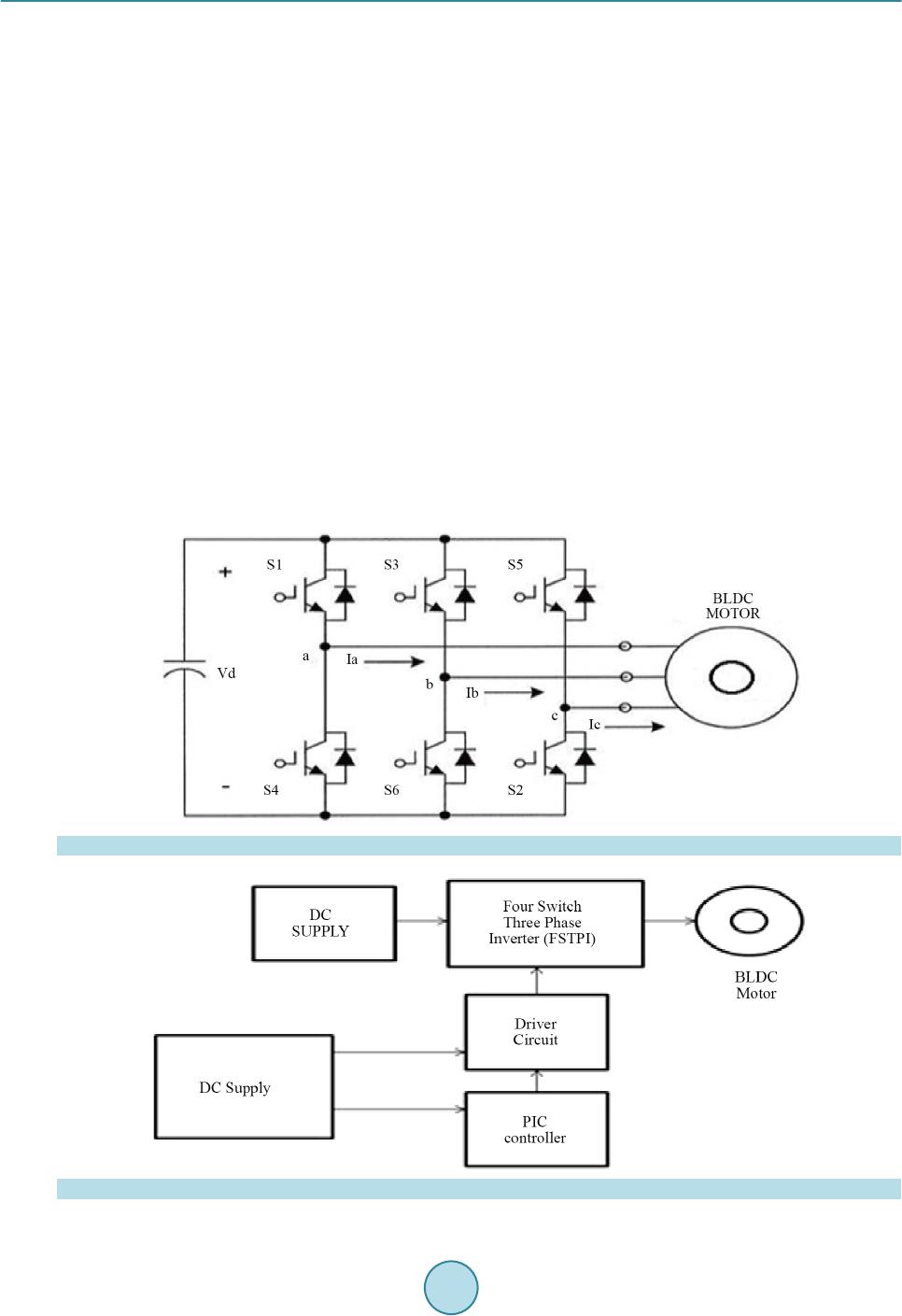
In this research, we significantly use sensorless control so for angle position hall sensing fully avoided. Brush-
less DC drives which is preferable for compact, low maintenance and high reliability system in order to reduce
the mechanical strength so it proposed and convenient simulation results are carried out. The simulation of the
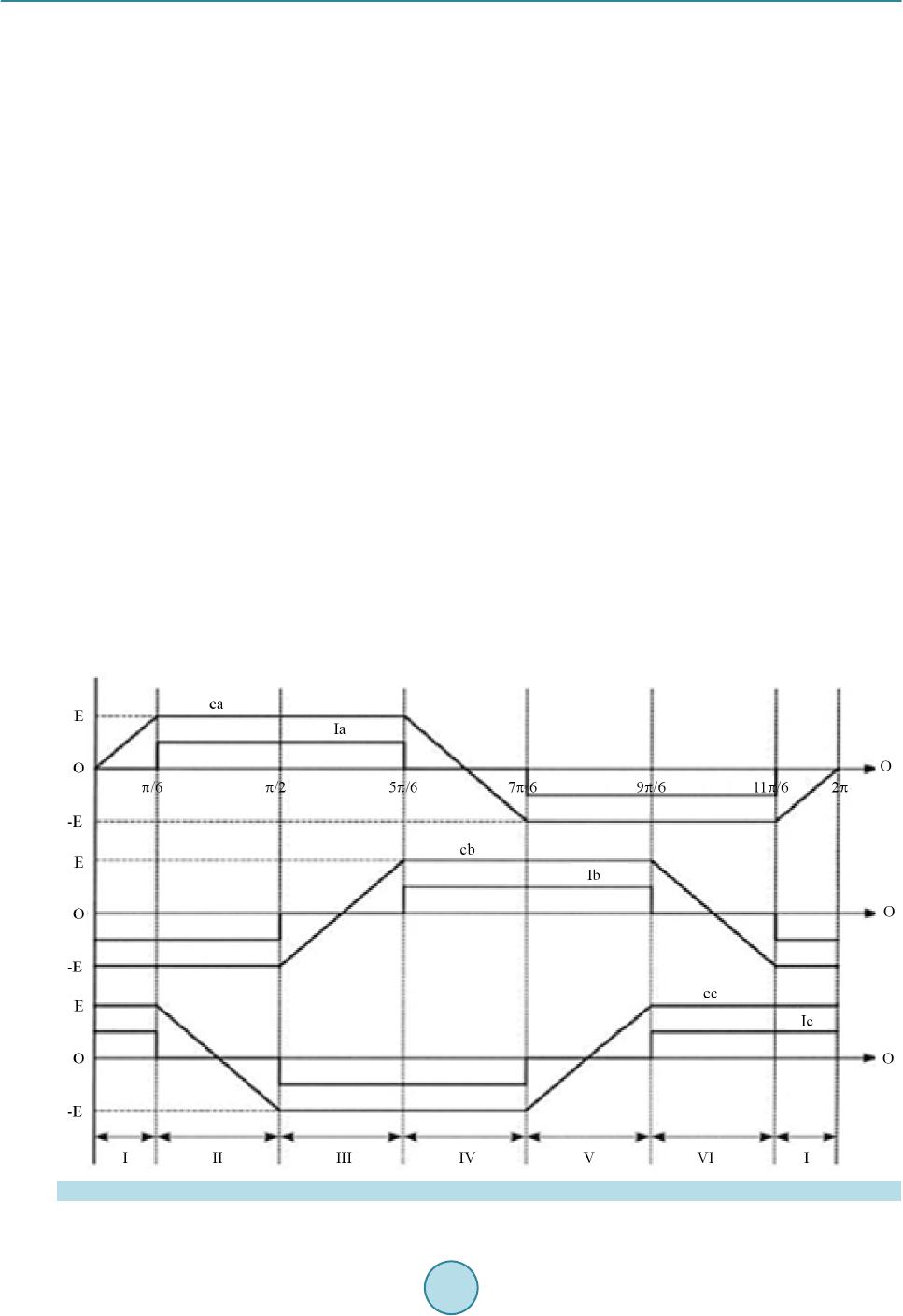
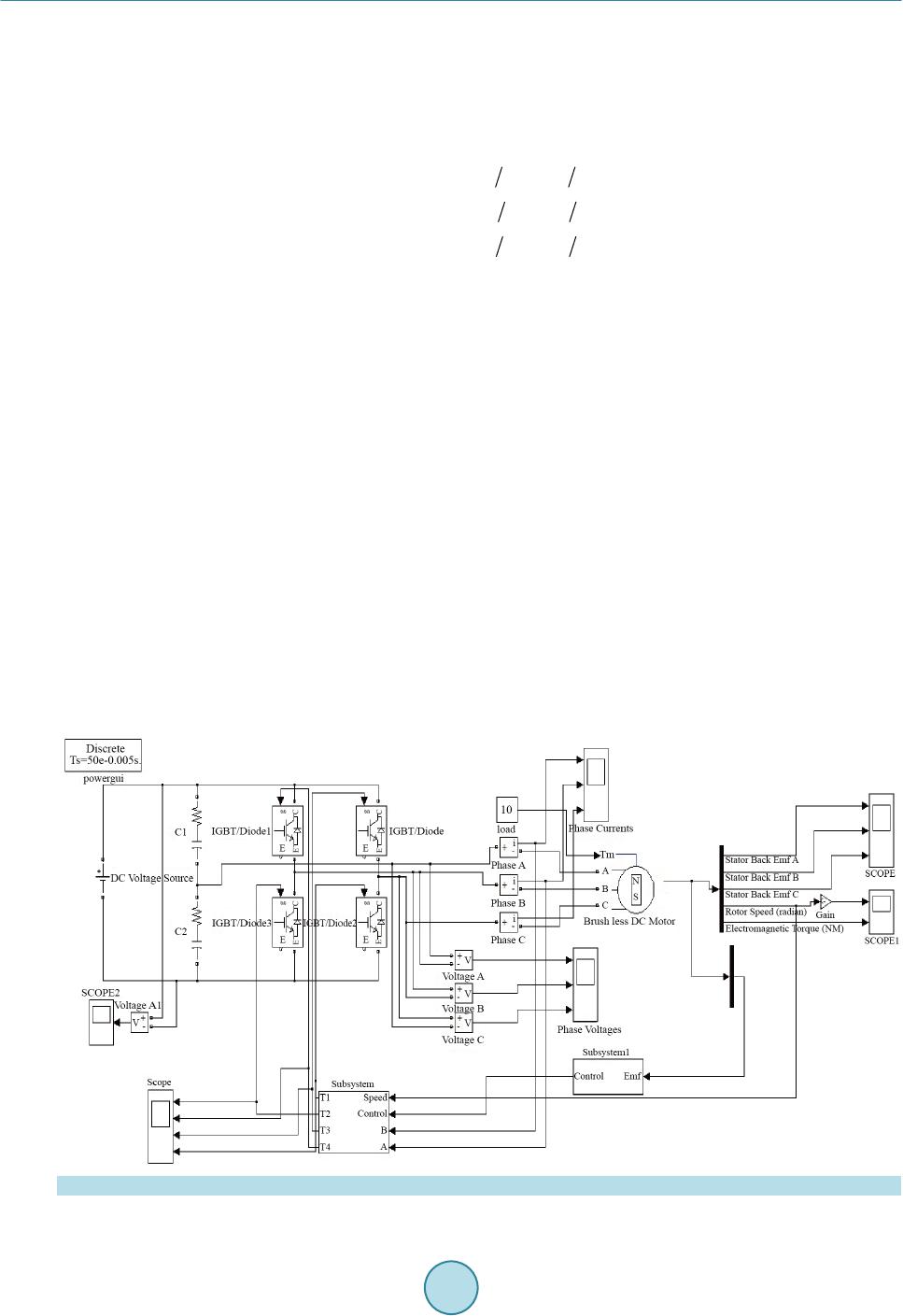
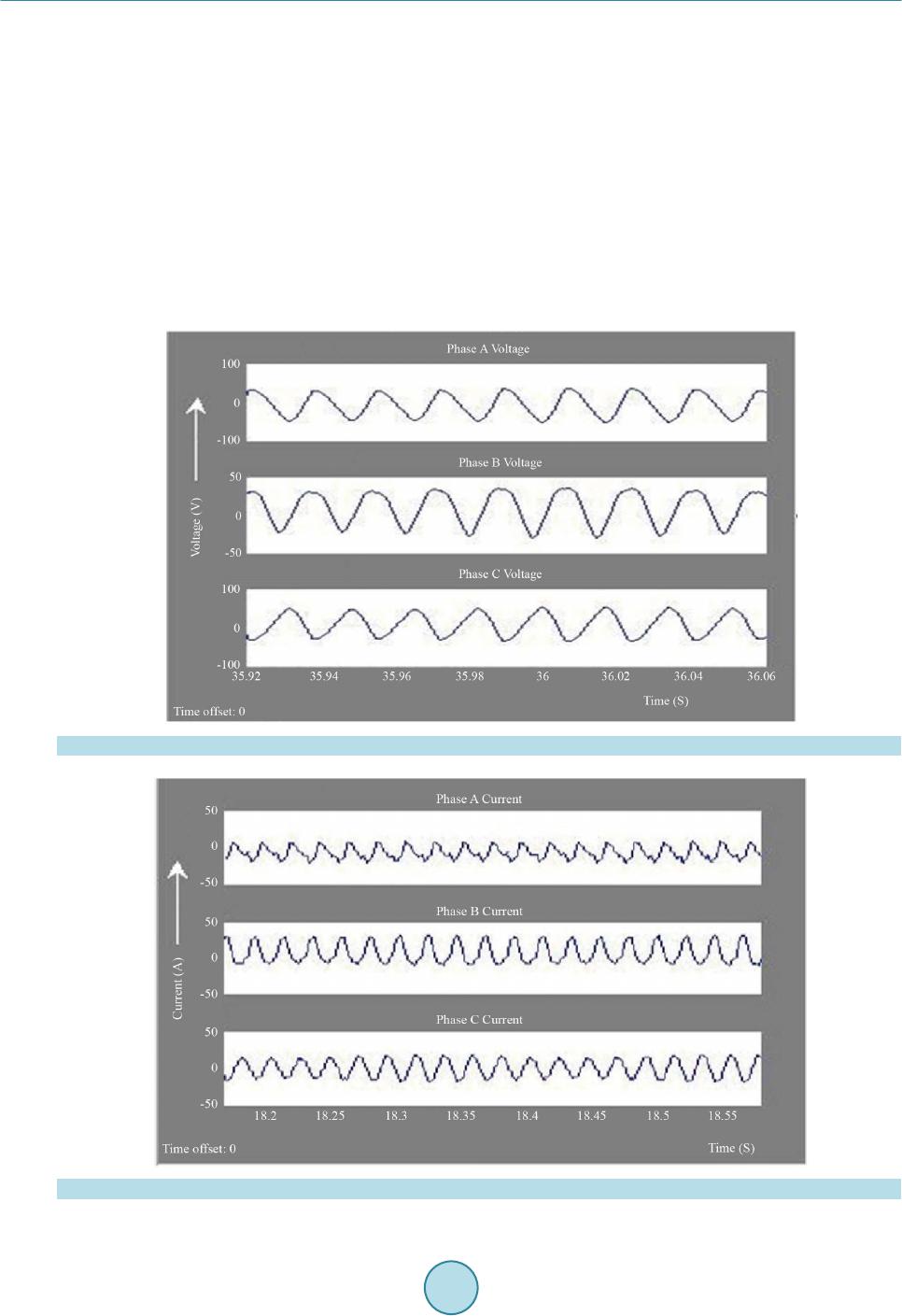
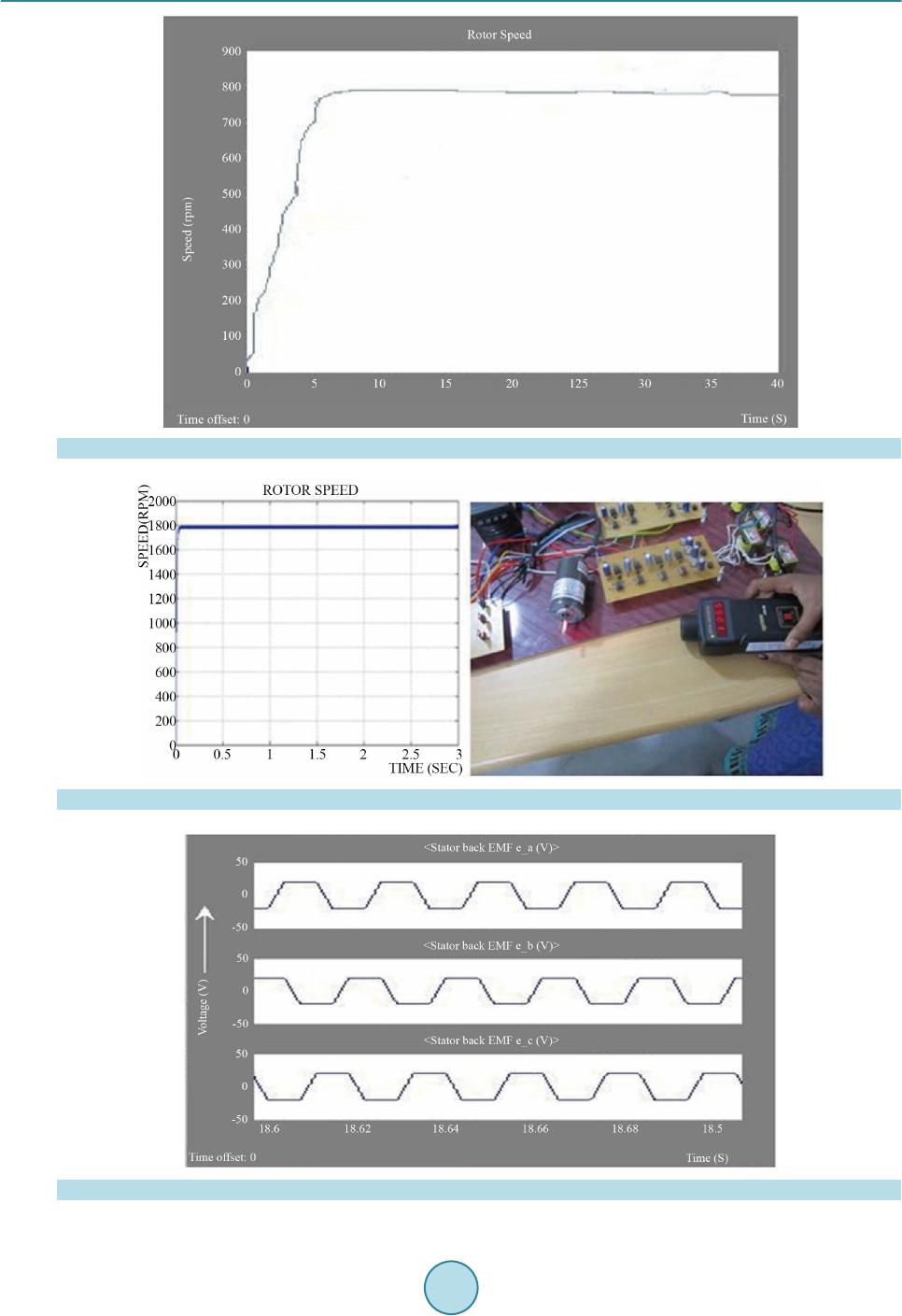
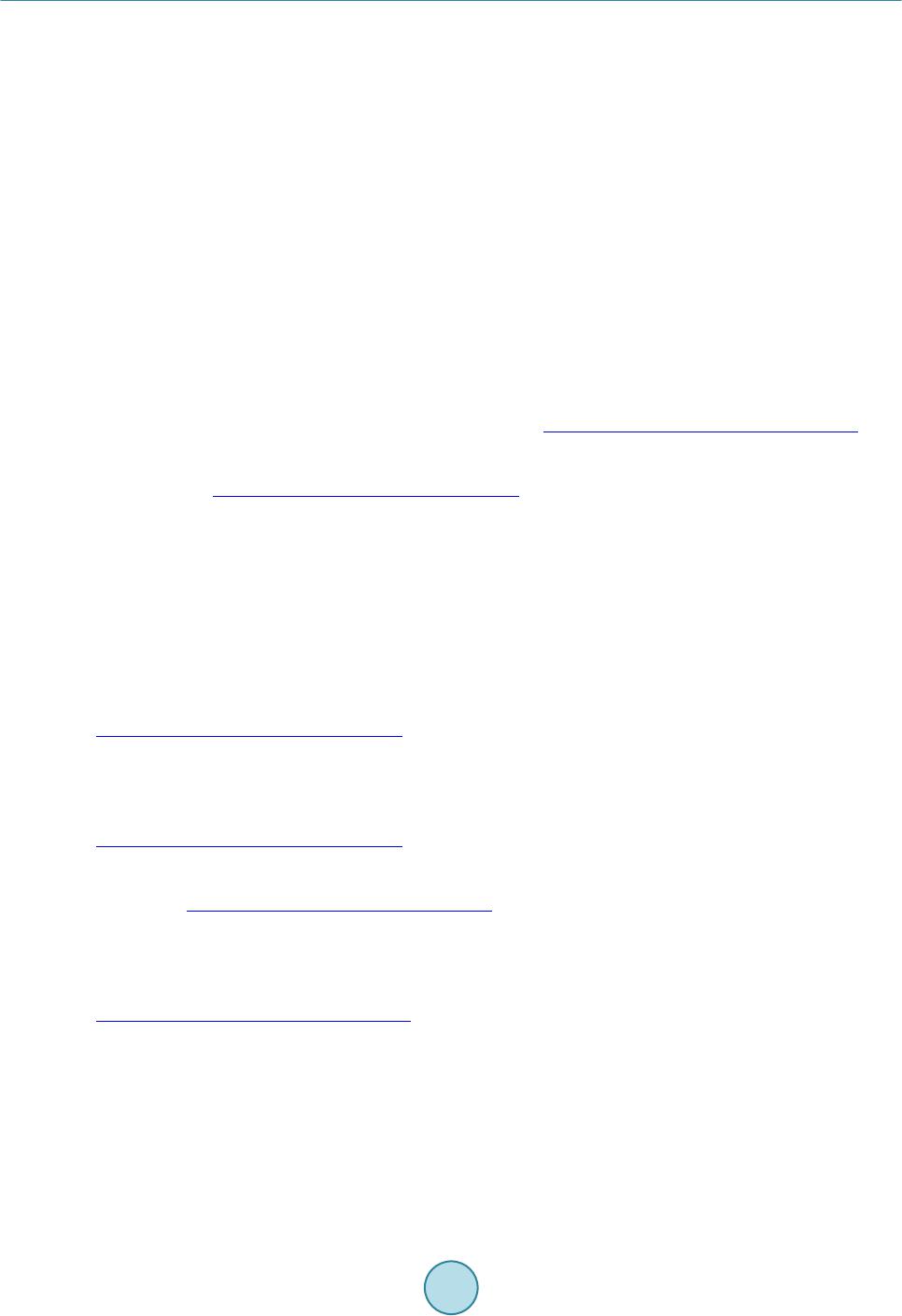
brushless DC motor is done using the software MATLAB/SIMULINK whose back EMF, phase voltage phase
current, rotor speed waveform are analyzed and incorporated the speed of rotor is 800 rpm are analyse d. In this
proposed converter used less number of ins ulated b ipola r switche s whic h e valuate the conve nti o na l co nve rt er . In
this research, the back electromotive force compensating and direct current controlling for brushless DC motor
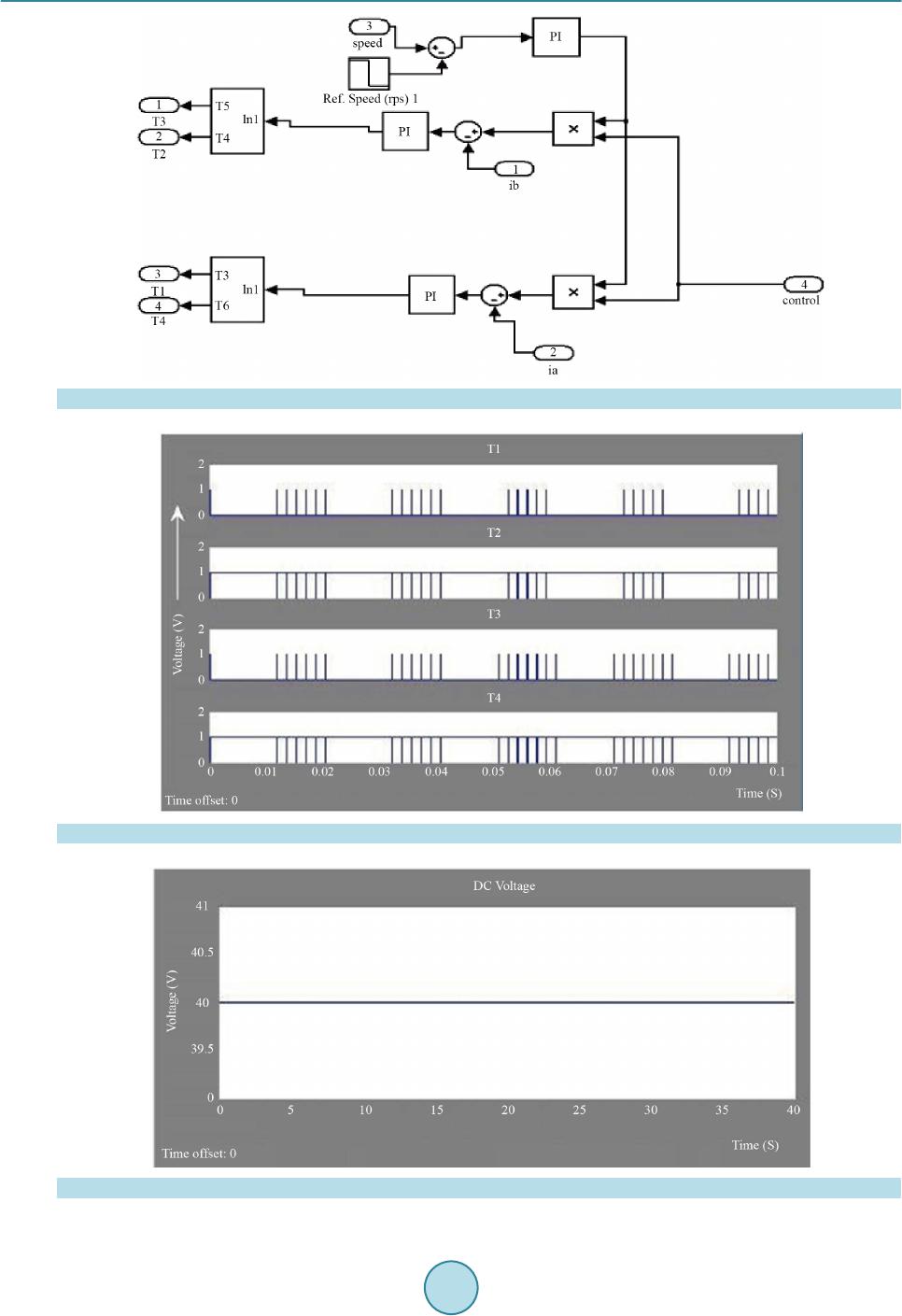
drives analyzed and switch leg failure are avoided. In this s cheme, the pulse width modulation is applied to high
side switches of the converter. This pulse width modulation scheme can eradicate the offset voltage in the back
electromotive force signal caused by the voltage drop of the insulated b ipolar ins ulator an d also increa se syste m
efficiency by reducing the conduction loss is achieved. This proposed converter used sensorless control opera-
tion. There are no hall sensors, therefore, the system becomes robust, optimized design of the brushless DC mo-
tor achieves higher efficiency and better speed, current is formulated.
References
[1] Bo lfazl, H.N. (2008) A Novel Position Sensorless Control of a Four-Switch, Brushless DC Motor Drive without Phase
Shifter. IEEE Transactions on Power Electronics, 23, 3079-3087. http://dx.doi.org/10.1109/TPEL.2008.2002084
[2] Young-Kuk, L., Tae-Hyung, K. and Ehsani, M. (2003) On the Feasibility of Four-Switch Three-Phase Brushless DC
Motor Drives for Lo w Cost Co mmercial Appl ications : Topology and Control. IEEE Transactions on Power Electron-
ics, 18, 164-172. http://dx.doi.org/10.1109/TPEL.2002.807125
[3] Lin, C.-K., Yu, J.-T., Fu, L.-C. and Liu, T.-H. (2012) A Sensorless Position Control for Four-Switch Three-Phase In-
verter-Fed Interior Permanent Magnet Synchronous Motor Drive Systems. Proceeding of the IEEE/ASME Internation-
al Conference on Advanced Intelligent Mechatronics (AIM), 1036-1041.
[4] Adaur ia, Y., Patel, A.N., Patel, V. and Patel, J. ( 20 12) Simulation and Analysis of Three Phas e Voltage So urce Inverter
Using Four Semiconductor Swi t ches. Proceeding of the Engineering Nirma University International Conference on
Engineering (NUiCONE), Ahmedabad, 1-1 4.
[5] An, Q.T., Sun, L., Zhao, K. and Jahns, T.M. (2010) Scalar PWM Algorithms for Four-Switch Three-Phase Inverters.
Electro nics Lett ers , 46, 900 -902.
[6] Elt rao de Ro ssiter Correa, M ., Jacobin a, C.B., Cabr al da Silva, E.R. and Lima, A.M.N. (2006) A General PWM Strat-
egy for Four-Switch Thre e-Phase Inverters. IEEE Trans ac tions on Pow e r Ele c t roni c s , 21, 1618-1627.
http://dx.doi.org/10.1109/TPEL.2006.882964
[7] Xia, H.L., Li, Z.Q. and S hi, T.N. (2009) A Control Strategy for Four-Switch Thre e-Phase Bru shless DC Motor Using
Single Current Sensor. IEEE Transactions on Power Electronics, 56, 2058-2066.
[8] Lin, H.-T., Hung, C.-W. and Liu, C.-W. (2008) Position Sensor Less Control for Four-Switch Three-Phase Brushless
DC Motor Drives. IEEE Tr ansact ions on Pow e r Ele c t ronics, 23, 438-444.
http://dx.doi.org/10.1109/TPEL.2007.911782
[9] Damodharan, P. and Vasudevan, K. (2010) Sensor Less Brushless DC Mo tor Dri ve Based on the Zero -C rossin g Detec-
tion of Back Electromot ive Fo rce (E MF) from the Lin e V oltage Di fferen ce. IEEE Transactions on Energy Conversion,
25, 661-668. http://dx.doi.org/10.1109/TEC.2010.2041781
[10] Jung, D.-H. and Ha, I.-J. (2000) Low-Cost Sensor Less Control of Brushless DC Motors Using a Frequency-Inde-
pendent Phase Shifter. IEEE Transactions on Power Electronics, 15, 748-752.
[11] El Badsi, B., Bouzidi, B. and Masmoudi, A. (2013) DTC Scheme for a Four-Switch Inverter-Fed Induction Motor
Emulating the Six-Switch Inverter Operation. IEEE Transactions on Power Electronics, 28, 3528-3538.
http://dx.doi.org/10.1109/TPEL.2012.2225449
[12] Geethu, J. and Radhakrishnan, K. (2013) Simulation of Four Switch Brushless DC Motor Drive. International Journal
of Latest Trends in Engi ne e r ing and Techno logy, 2, 100-106.
[13] Rajasek aran, P . and Van chinathan, K. (2013) Improved Performance of Four Switch Three Phase Bru shless DC Motor
Using Speed-Current Control Algorithm. International Journal of Computer Applications, 68.
[14] Hoseinpour, A. (2010) Three Phase Active Filter with Four Switching Inverter and Variable Index Modulation. Pro-
cee di ng of t he 1st Power Quality Conference (PQC), Tehran , 1-7.