 Applied Mathematics, 2011, 2, 953-958 doi:10.4236/am.2011.28131 Published Online August 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Application of He’s Variational Iteration Method and Adomian Decomposition Method to Solution for the Fifth Order Caudrey-Dodd-Gibbon (CDG) Equation Mehdi Safari Department of Mechanical Engineering, Aligoodarz Branch, Islamic Azad University, Aligoodarz, Iran E-mail: ms_safari2005@yahoo.com Received June 14, 2010; revised June 26, 2011; accepted July 4, 2011 Abstract In this work we use the He’s variational iteration method and Adomian decomposition method to solution N-soliton solutions for the fifth order Caudrey-Dodd-Gibbon (CDG) Equation. Keywords: Variation Iteration Method, Adomian Decomposition Method, Caudrey-Dodd-Gibbon (CDG) Equation 1. Introduction The theory of solitary waves has attracted much interest in recent years for treatment of PDEs describing nonlin- ear and evolution concepts. Nonlinear phenomena appear in many areas of scientific fields such as solid state physics, plasma physics, fluid dynamics, mathematical biology and chemical kinetics. The nonlinear problems are characterized by dispersive effects, dissipative effects, convection-advection, and diffusion process. A broad class of analytical solutions methods, such as inverse scattering method, Ba¨cklund transformation method, Hirota’s bilinear scheme [1-6], Hereman’s method [7,8], pseudo spectral method, Jacobi elliptic method, Painleve´ analysis [9], and other methods, were used to handle these problems. However, some of these analyti- cal solutions methods are not easy to use because of the tedious work that it requires. This paper is concerned with the multiple-soliton solutions of the fifth order non- linear Caudrey-Dodd-Gibbon (CDG) equation [10,11] 2 30 30 1800 txxxxxxxxx xxx uuuu uuuu (1) with is a sufficiently often differentiable func- tion. It is well-known that this equation is completely integrable. This means that it has multiple-soliton solu- tions. The CDG equation possesses the Painleve´ prop- erty as proved by Weiss in [9]. A useful study is intro- duced in [9] using the Painleve´ property and the Ba¨cklund transformation in handling the CDG equation and other equations as well. It was found in [9] that the CDG Equation (1) has the Backlund transformation ,uxt 2 2 2lnu x u (2) where satisfies the CDG equation, and 2 u 1 26 xx u (3) and 22 2;4; t x xx x 0 (4) The last two equations can be expressed as the Lax pair 62 0 xxx xxx u (5) 2 22 186 620 txxx x uuuxx (6) The objective of this work is to further complement other studies related to the CDG equation. The tanh method [12-17], and the tanh-coth method [18,19] will be used to stress its power in the determination of single- soliton solution and other travelling wave solutions. We aim to use Adomian decomposition method and variation iteratin method to solve this equation. 2. Basic Idea of He’s Variational Iteration Method To clarify the basic ideas of VIM, we consider the fol-  954 M. SAFARI lowing differential equation: LuNug t (7) where is a linear operator, a nonlinear operator and L N t an inhomogeneous term. According to VIM, we can write down a correction functional as follows: 10d t nnn n ututLu Nu g (8) where is a general Lagrangian multiplier which can be identified optimally via the variational theory. The subscript indicates the nth approximation and is considered as a restricted variation nn u 0 n u . a. VIM Implement f or this Equa tion: We first consider the application of VIM Caudrey- Dodd-Gibbon(CDG) equ a tion: 2 30 30 1800 txxxxxxxxx xxx uuuu uuuu (9) with the initial conditions of: 22 0,secuxth x (10) To earn general Lagrangian multiplier () we put coeficient of tor u u equal zero.where prime indicates a differential with respect to x and dot denotes a differen- tial with respect to t. We earn respect to . After some calculations, we obtain the following stationary conditions in Equations(10a) and (10b): t 1 t 0 (10a) 1 (10b) Its correction variational functional in x and t can be expressed, respectively, as follows: 5 15 0 2 2 32 3 ,, , 30,, 30, ,180,,d t nnnn nn n nnn uxtuxtu xtu xt x uxt uxtuxt xx uxtuxt uxt x x , (9) We start with the initial approximation of ,0ux given by Equation (4). Using the above iteration formu- las (9), we can directly obtain the other components as follows: 25 13 cosh+32 tsinh ,cosh x uxt x (11) 8 2 210 7 5 5 15 3 3 15 3 2 20 4 4 20 420 4 15 3 8 10 210 2 1 ,(coshx cosh x +32sinhxtcoshx +163840sinhxt coshx 614400sinhxt coshx 7372800t coshx + 2949120tcoshx+ 4423680t + 491520sinhxtcoshx +512t coshx768tcosh uxt μμ μ μμ μ μμ μ μμ μ μμ μμ μ μμ μ μμμ 6 xμ (13) and continue then we show the last result in Figure 1(a). 3. Basic Idea of Adomian Decomposition Method We begin with the equation LuRuFugt (14) where L is the operator of the highest-ordered derivatives with respect to t and R is the remainder of the linear op- erator. The nonlinear term is represented by u. Thus we get Lug tR uFu (15) The inverse 1 L is assumed an integral operator given by 1 0d t L t (16) The operating with the operator on both sides of Equation (15) we have 1 L 1 0 uf LgtRuFu (17) where 0 is the solution of homogeneous equation 0Lu (18) involving the constants of integration. The integration constants involved in the solution of hom ogeneous Eq ua- tion (18) are to be determined by the initial or boundary condition according as the problem is initial-value prob- lem or boundary-value problem. The ADM assumes that the unknown function ,uxt Copyright © 2011 SciRes. AM 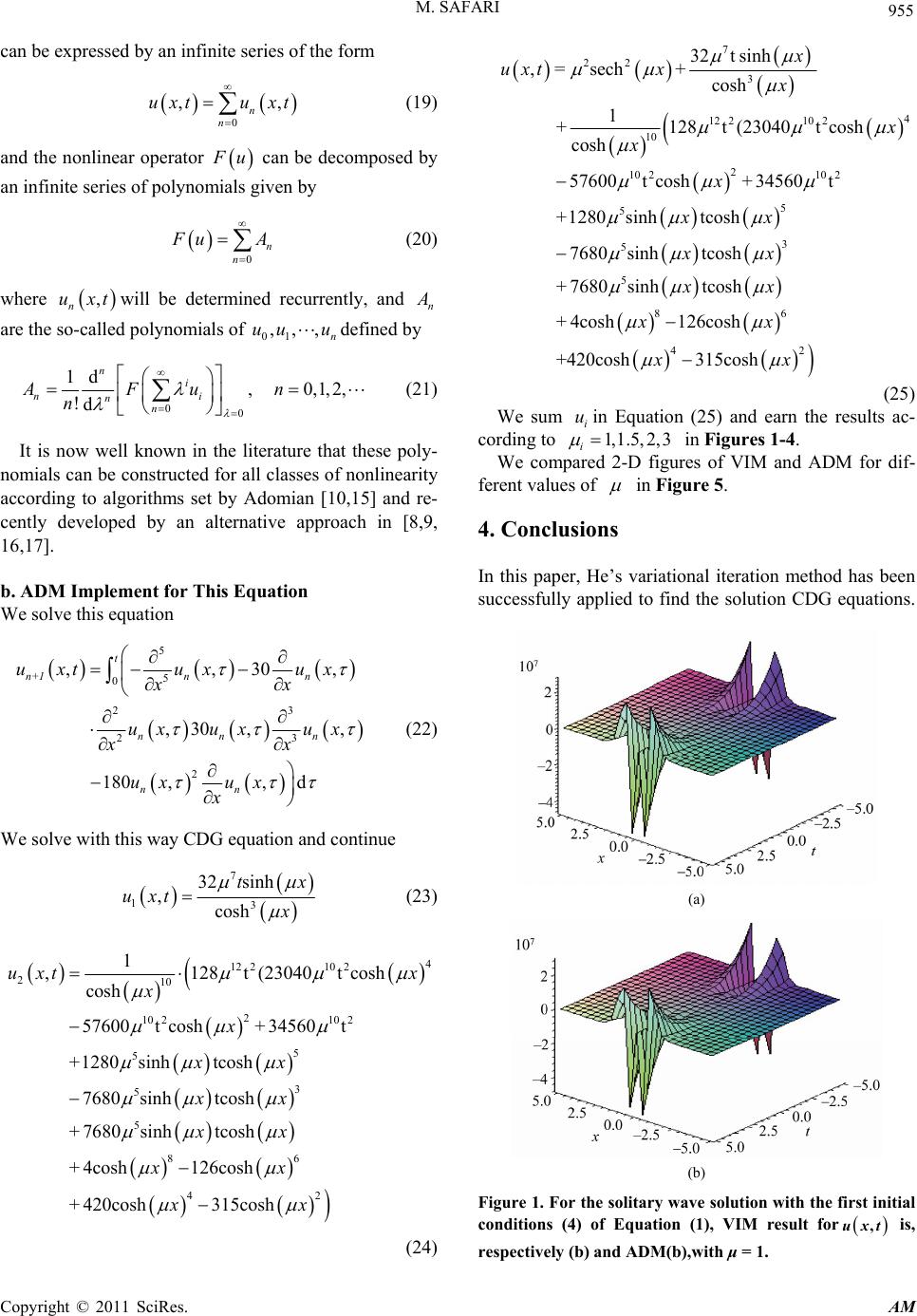 M. SAFARI 955 , can be expressed by an infinite series of the form 0 , n n uxtu xt (19) and the nonlinear operator u can be decomposed by an infinite series of polynomials given by 0n n u A (20) where will be determined recurrently, and , n uxt n are the so-called polynomials of defined by 01 ,,, n uu u 00 1d ,0,1,2, !d n i ni n n AFun n (21) It is now well known in the literature that these poly- nomials can be constructed for all classes of nonlinearity according to algorithms set by Adomian [10,15] and re- cently developed by an alternative approach in [8,9, 16,17]. b. ADM Implement for This Equation We solve this equation 5 5 0 23 23 2 ,,30 ,30 ,, 180,, d t n+1n n nn n nn uxtux ux x x ux uxux xx ux ux x , (22) We solve with this way CDG equation and continue 7 13 32 sinh ,cosh tx uxt (23) 4 12 210 2 210 2 10 210 2 5 5 3 5 5 86 42 1 ,128t(23040t cosh cosh 57600 tcosh+34560 t +1280 sinhtcosh 7680 sinhtcosh +7680 sinhtcosh + 4cosh126cosh + 420cosh315cosh uxt x x x xx xx xx xx xx (24) 7 22 3 4 12 210 2 10 2 10 210 2 5 5 3 5 5 86 4 32t sinh ,sech+ cosh 1 +128t(23040tcosh cosh 57600t cosh+34560t +1280sinhtcosh 7680 sinhtcosh +7680 sinhtcosh +4cosh 126cosh +420cosh 315co x uxt= xx x x xx xx xx xx x 2 sh x (25) We sum in Equation (25) and earn the results ac- cording to i u i1,1.5,2, 3 in Figures 1-4. We compared 2-D figures of VIM and ADM for dif- ferent values of in Figure 5. 4. Conclusions In this paper, He’s variational iteration method has been successfully applied to find the solution CDG equations. (a) (b) Figure 1. For the solitary wave solution with the first initial conditions (4) of Equation (1), VIM result for uxt, is, respectively (b) and ADM(b),with μ = 1. Copyright © 2011 SciRes. AM 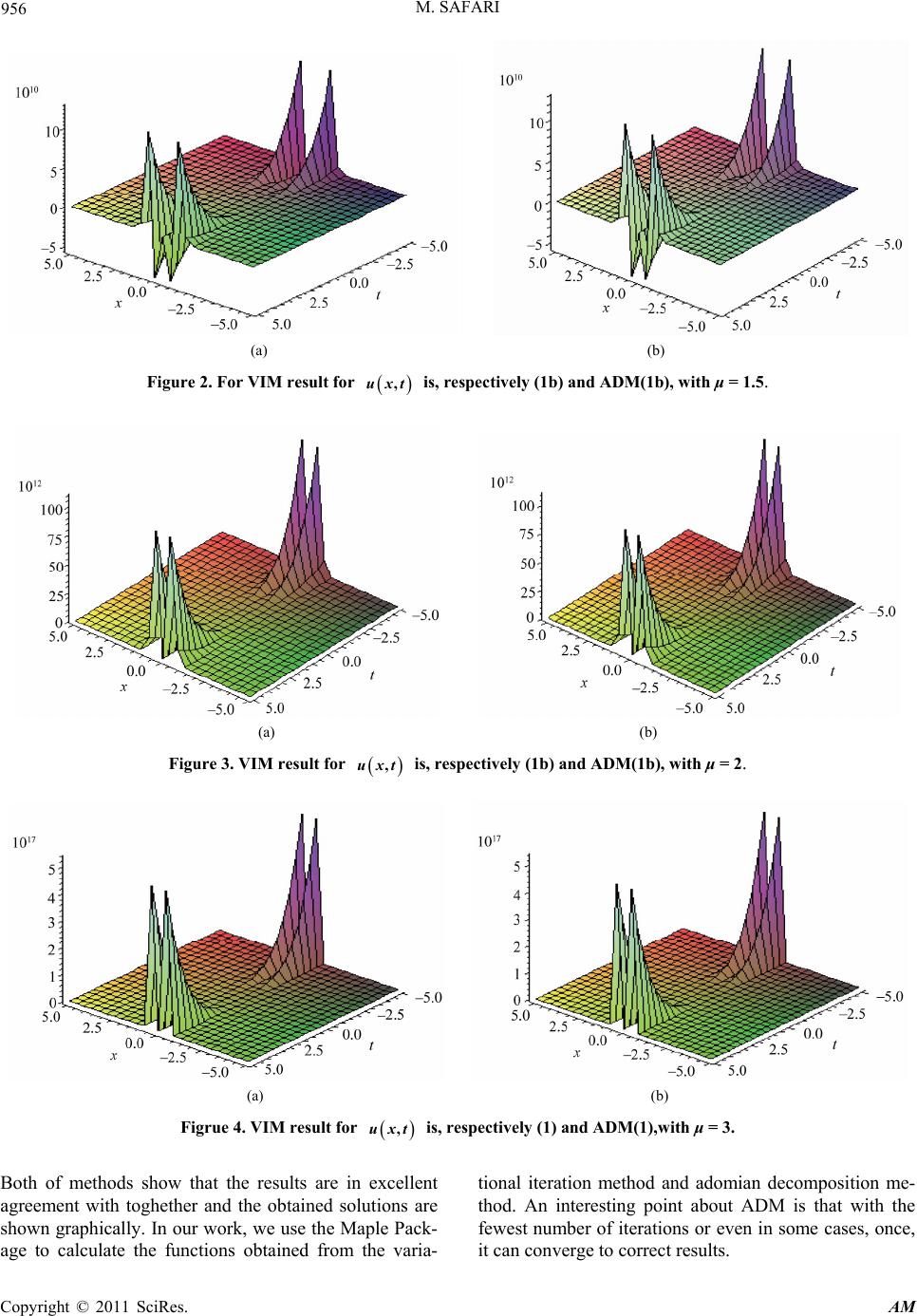 M. SAFARI Copyright © 2011 SciRes. AM 956 (a) (b) Figure 2. For VIM result for uxt, is, respectively (1b) and ADM(1b), with μ = 1.5. (a) (b) Figure 3. VIM result for uxt, is, respectively (1b) and ADM(1b), with μ = 2. (a) (b) Figrue 4. VIM result for uxt, is, respectively (1) and ADM(1),with μ = 3. Both of methods show that the results are in excellent agreement with toghether and the obtained solutions are shown graphically. In our work, we use the Maple Pack- age to calculate the functions obtained from the varia- tional iteration method and adomian decomposition me- thod. An interesting point about ADM is that with the fewest number of iterations or even in some cases, once, it can converge to correct results. 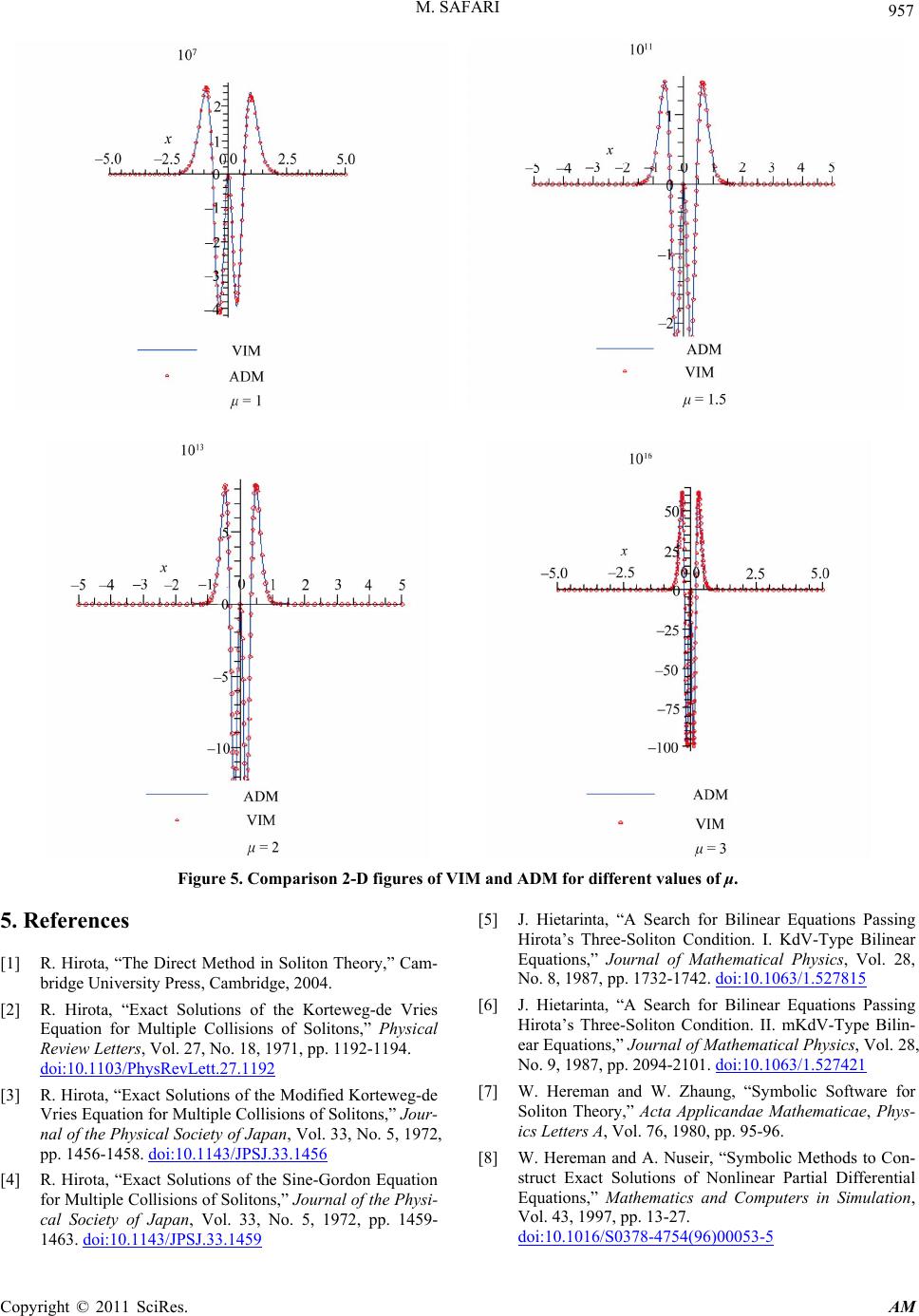 M. SAFARI 957 Figure 5. Comparison 2-D figures of VIM and ADM for different values of μ. 5. References [1] R. Hirota, “The Direct Method in Soliton Theory,” Cam- bridge University Press, Cambridge, 2004. [2] R. Hirota, “Exact Solutions of the Korteweg-de Vries Equation for Multiple Collisions of Solitons,” Physical Review Letters, Vol. 27, No. 18, 1971, pp. 1192-1194. doi:10.1103/PhysRevLett.27.1192 [3] R. Hirota, “Exact Solutions of the Modified Korteweg-de Vries Equation for Multiple Collisions of Solitons,” Jour- nal of the Physical Society of Japan, Vol. 33, No. 5, 1972, pp. 1456-1458. doi:10.1143/JPSJ.33.1456 [4] R. Hirota, “Exact Solutions of the Sine-Gordon Equation for Multiple Collisions of Solitons,” Journal of the Physi- cal Society of Japan, Vol. 33, No. 5, 1972, pp. 1459- 1463. doi:10.1143/JPSJ.33.1459 [5] J. Hietarinta, “A Search for Bilinear Equations Passing Hirota’s Three-Soliton Condition. I. KdV-Type Bilinear Equations,” Journal of Mathematical Physics, Vol. 28, No. 8, 1987, pp. 1732-1742. doi:10.1063/1.527815 [6] J. Hietarinta, “A Search for Bilinear Equations Passing Hirota’s Three-Soliton Condition. II. mKdV-Type Bilin- ear Equations,” Journal of Mathematical Physics, Vol. 28, No. 9, 1987, pp. 2094-2101. doi:10.1063/1.527421 [7] W. Hereman and W. Zhaung, “Symbolic Software for Soliton Theory,” Acta Applicandae Mathematicae, Phys- ics Letters A, Vol. 76, 1980, pp. 95-96. [8] W. Hereman and A. Nuseir, “Symbolic Methods to Con- struct Exact Solutions of Nonlinear Partial Differential Equations,” Mathematics and Computers in Simulation, Vol. 43, 1997, pp. 13-27. doi:10.1016/S0378-4754(96)00053-5 Copyright © 2011 SciRes. AM  958 M. SAFARI [9] J. Weiss, “On Classes of Integrable Systems and the Painleve´ Property,” Journal of Mathematical Physics, Vol. 25, No. 1, 1984, pp. 13-24. doi:10.1063/1.526009 [10] P. J. Caudrey, R. K. Dodd and J. D. Gibbon, “A New Heirarchy of Korteweg-de Vries Equations,” Proceedings of the Royal Society A, Vol. 351, 1976, pp. 407-422. doi:10.1098/rspa.1976.0149 [11] R. K. Dodd and J. D. Gibbon, “The Prolongation Struc- ture of a Higher Order Korteweg-de Vries Equations,” Proceedings of the Royal Society A, Vol. 358, 1977, pp. 287-300. [12] W. Malfliet, “The Tanh Method: A Tool for Solving Cer- tain Classes of Nonlinear Evolution and Wave Equa- tions,” Journal of Computational and Applied Mathe- matics, Vol. 164-165, 2004, pp. 529-541. doi:10.1016/S0377-0427(03)00645-9 [13] W. Malfliet, “Solitary Wave Solutions of Nonlinear Wave Equations,” American Journal of Physics, Vol. 60, No. 7, 1992, pp. 650-654. doi:10.1119/1.17120 [14] W. Malfliet and W. Hereman, “The Tanh Method: I. Ex- act Solutions of Nonlinear Evolution and Wave Equa- tions,” Physica Scripta, Vol. 54, 1996, pp. 563-568. doi:10.1088/0031-8949/54/6/003 [15] W. Malfliet and W. Hereman, “The Tanh Method: II. Perturbation Technique for Conservative Systems,” Phy- sica Scripta, Vol. 54, 1996, pp. 569-575. doi:10.1088/0031-8949/54/6/004 [16] A. M. Wazwaz, “The Tanh Method for Travelling Wave Solutions of Nonlinear Equations,” Applied Mathematics and Computation, Vol. 154, No. 3, 2004, pp. 713-723. doi:10.1016/S0096-3003(03)00745-8 [17] A. M. Wazwaz, “Partial Differential Equations: Methods and Applications,” Balkema Publishers, The Netherlands, 2002. [18] A. M. Wazwaz, “The Extended Tanh Method for New Solitons Solutions for Many Forms of the Fifth-Order KdV Equations,” Applied Mathematics and Computation, Vol. 184, No. 2, 2007, pp. 1002-1014. doi:10.1016/j.amc.2006.07.002 [19] A. M. Wazwaz, “The Tanh-Coth Method for Solitons and Kink Solutions for Nonlinear Parabolic Equations,” Ap- plied Mathematics and Computation, Vol. 188, 2007, pp. 1467-1475. doi:10.1016/j.amc.2006.11.013 Copyright © 2011 SciRes. AM
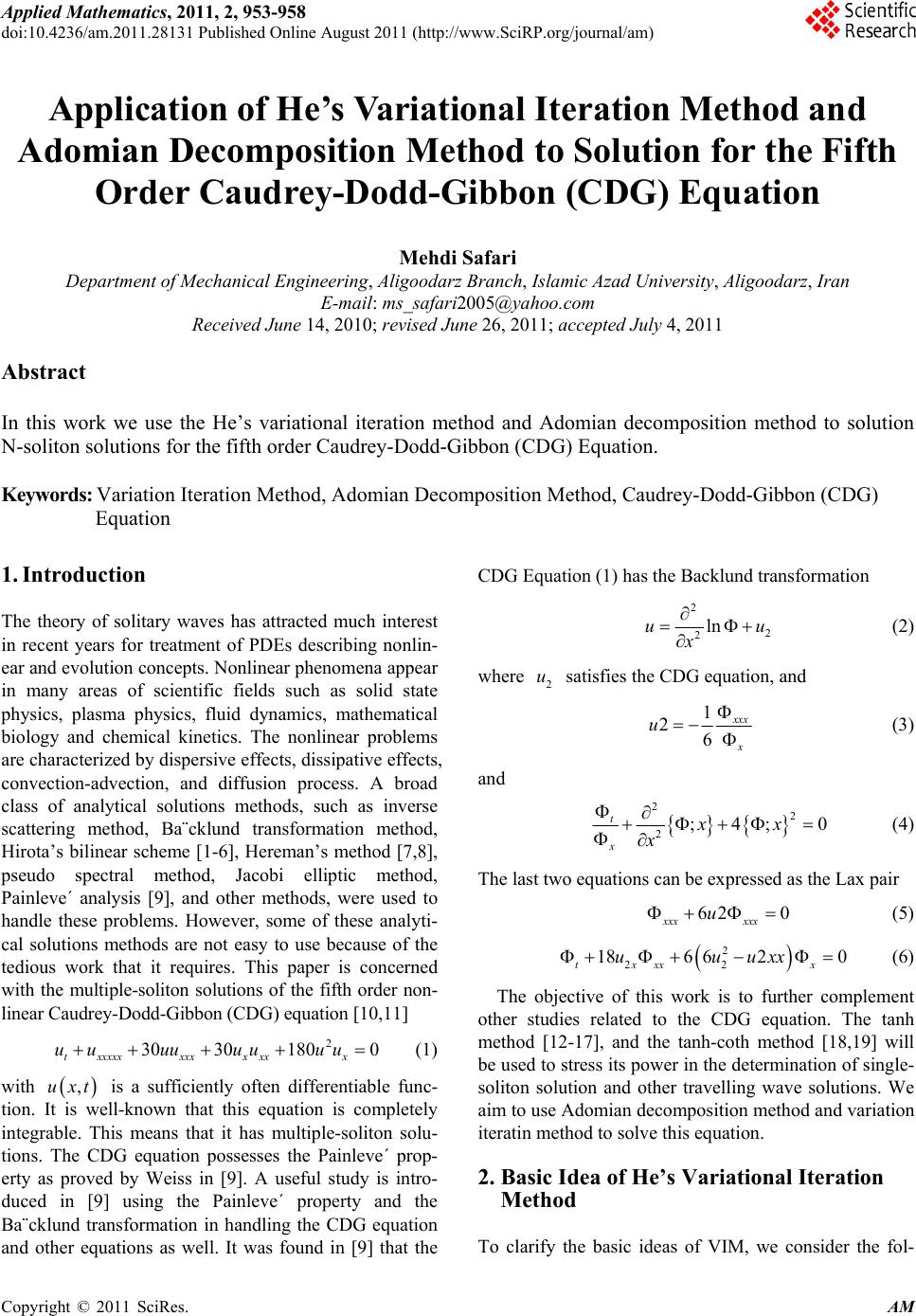
|