Stability Study and Modelling of a Pilot Controlled Regulator
868
sensing lines, the opening of the antipumping valve. This
feature has been confirmed by measurements and simu-
lations.
5. Conclusions
The final objective o f the study presented in this paper is
to improve the process control of the pressure regulator
that is to define the operating conditions that maintain a
constant set pressure at small enough oscillations within
tolerance field. For that purpose, numerical and experi-
mental approaches have been performed.
The comparison of calculations and measurements, has
confirmed the relevance of the modelling. From a quali-
tative and a quantitative point of view, the calculations
are in good agreement with experiments. Generally, the
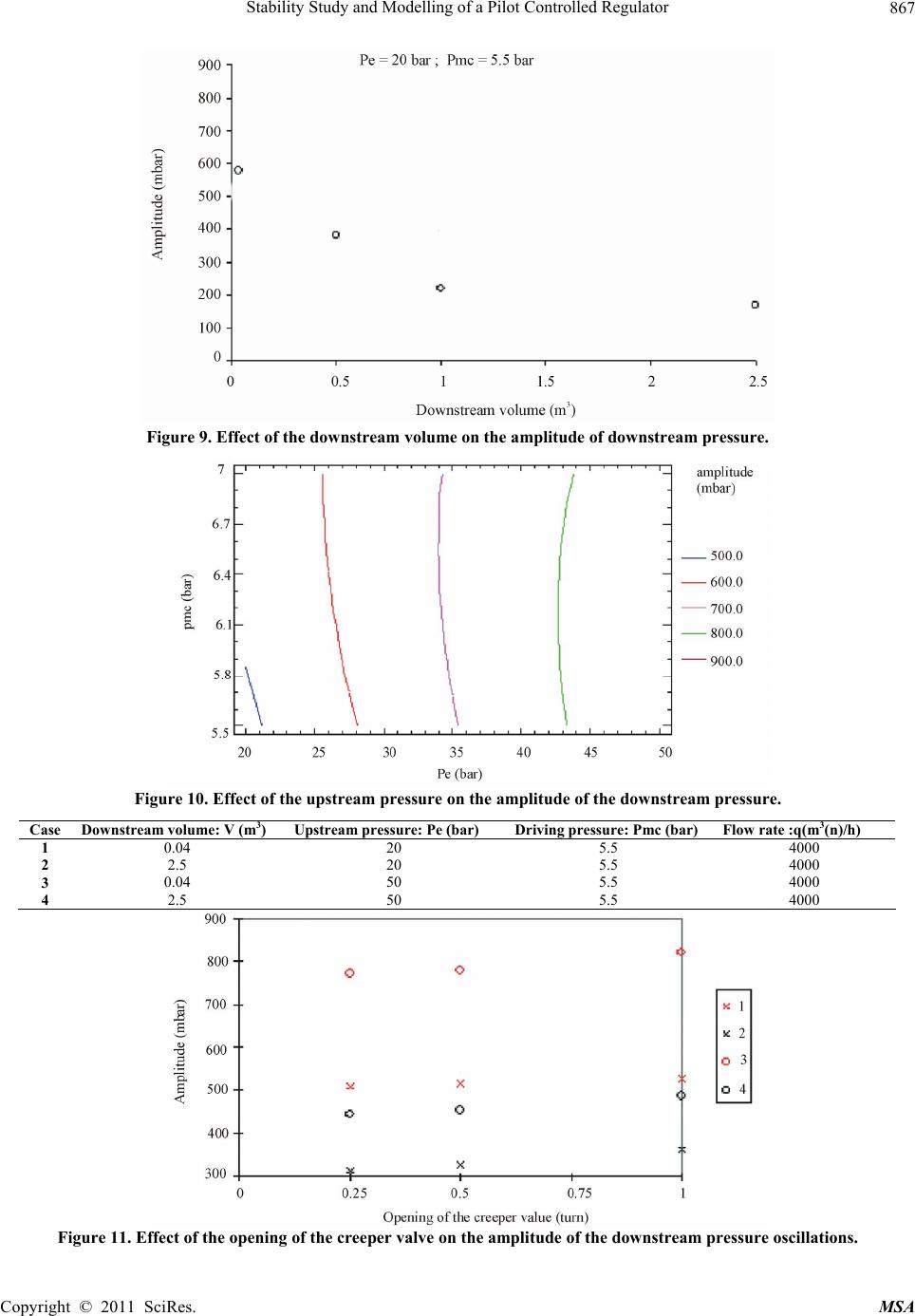
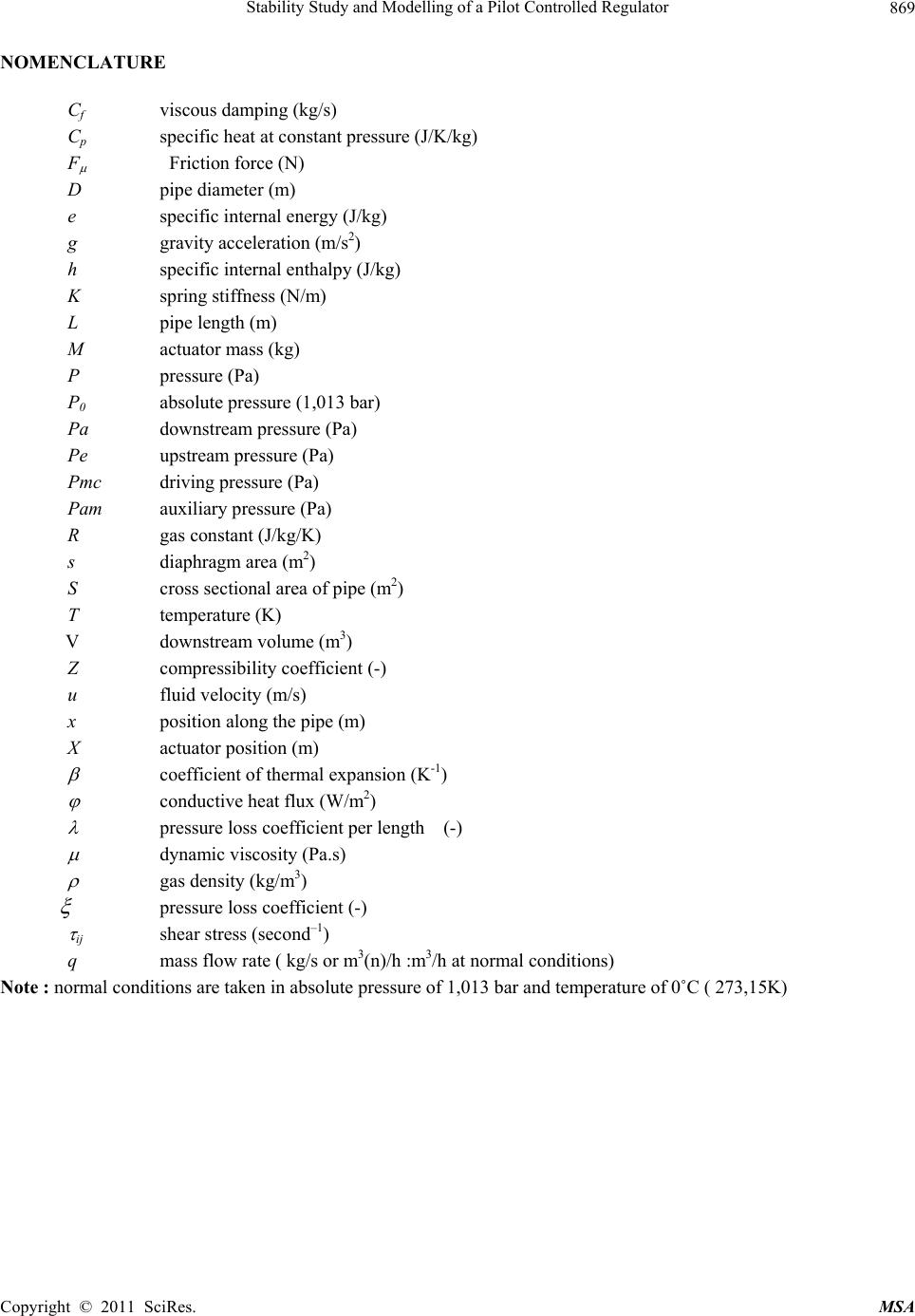
amplitude of oscillations increases dramatically for small
volumes (V = 0.04 m3) and higher upstream pressure. As
regards to the other parameters such as opening of
creeper valve and driving pressure, their influence on the
oscillation downstream pressure is not very sensitive.
Other adjustment parameters such as length of sensing
lines or opening of the antipumping valve, have only
marginal influences on the regulator stability.
6. Acknowledgments
The authors wish to express their indebtedness to Messrs.
MODE Laurent and DELENNE Bruno of the Research
and Development Division of Gaz De France for their
contributions toward the success of this work.
REFERENCES
[1] H. W. Earney, “Causes and Cures of Regulator Instatbil-
ity,” Fisher Controls International, Inc., Marshalltown,
1996.
[2] C. Carmichael, “Gas Regulators Work by Equalizing
Opposing Forces,” Pipe Line & Gas Industry, 1996, pp
29-33.
[3] B. Delenne, L. Mode and M. Blaudez, “Modelling and Si-
mulation of a Gas Pressure Regulator,” European Simula-
tion Symposium, Erlangen, Germany, 26-28 October 1999.
[4] B. Delenne and L. Mode, “Modelling and Simulation of
Pressure Oscillations in a Gas Pressure Regulator,” Pro-
ceedings of American Society of Mechanical Engineers,
Vol. 7, Orlando, 2000.
[5] Association Technique de l’Industrie et du Gaz en France,
Manuel pour le transport et la distribution du gaz, titre V
“Détente et Regulation du Gaz,” 1990.
[6] K. J. Adou, “Etude du Fonctionnement Dynamique des
Régulateurs-Detendeurs Industriels de Gaz,” Ph.D. Thesis,
Université Paris VI, Paris, 1989.
[7] F. Favret, M. Jemmali, J. P. Cornil, F. Deneuve and J. P.
Guiraud, “Stability of Distribution Network Governors
—R&D Forum Osaka Gas,” 1990.
[8] J. Goupy, “Plans D'expériences Pour Surface de Ré-
ponse,” Dunod, Paris, 2000.
[9] J. Goupy, “La Méthode des Plans d'expériences: Optimi-
sation du Choix des Essais et de L’interprétation des
Résultats,” Dunod, Paris, 1988.
[10] J. P. Schlienger and E. Bordenave, “Ecoulement Insta-
tionnaires de Gaz en Conduite,” 11 ème Congrès Interna-
tional du Gaz à Nantes, 1994.
[11] H. Schlichting, “Boundary Layer Theory,” McGraw Hill
Book Company, Auckland, 1979.
[12] Idel'cik, “Spravotchnik po Guidravlitcheskim Soprotiv-
leniam,” Memento des Pertes de charges, Gosenergoizdat,
Moscow, 1960.
[13] J. Taine and J. P. Petit, “Transfert de Chaleur; Thermique;
Ecoulement de Fluide,” Dunod, Paris, 1989.
[14] D. Y. Peng and D. B. Robinson, “A New Two-Constant
Equation of State,” Industrial & Engineering Chemistry
Fundamentals, Vol. 15, No. 1, 1976, pp. 59-64.
doi:10.1021/i160057a011
[15] H. W. Liepmann and A. Roshko, “Elements of Gas Dy-
namics,” John Wiley and Sons Inc., Hoboken, 1962.
[16] A. Jeandel, F. Favret, L. Lapenu and E. Lariviere,
“ALLAN. Simulat Ion, a General Tool for Model De-
scription and Simulation,” International Conference of
the International Building Performance Simulation Asso-
ciation, Adlaide, 16-18 August 1993.
[17] M. Nakhlé, “NEPTUNIX an Efficient tool for Large Size
Systems Simulations,” 2nd Internationnal Conference on
System Simulation, Lieges, Belgium, 3 December 1991.
Copyright © 2011 SciRes. MSA