M. R. ANSARI ET AL.
374
0510 15
0
1000
2000
3000
4000
5000
6000
7000
8000
time (s)
T (C)
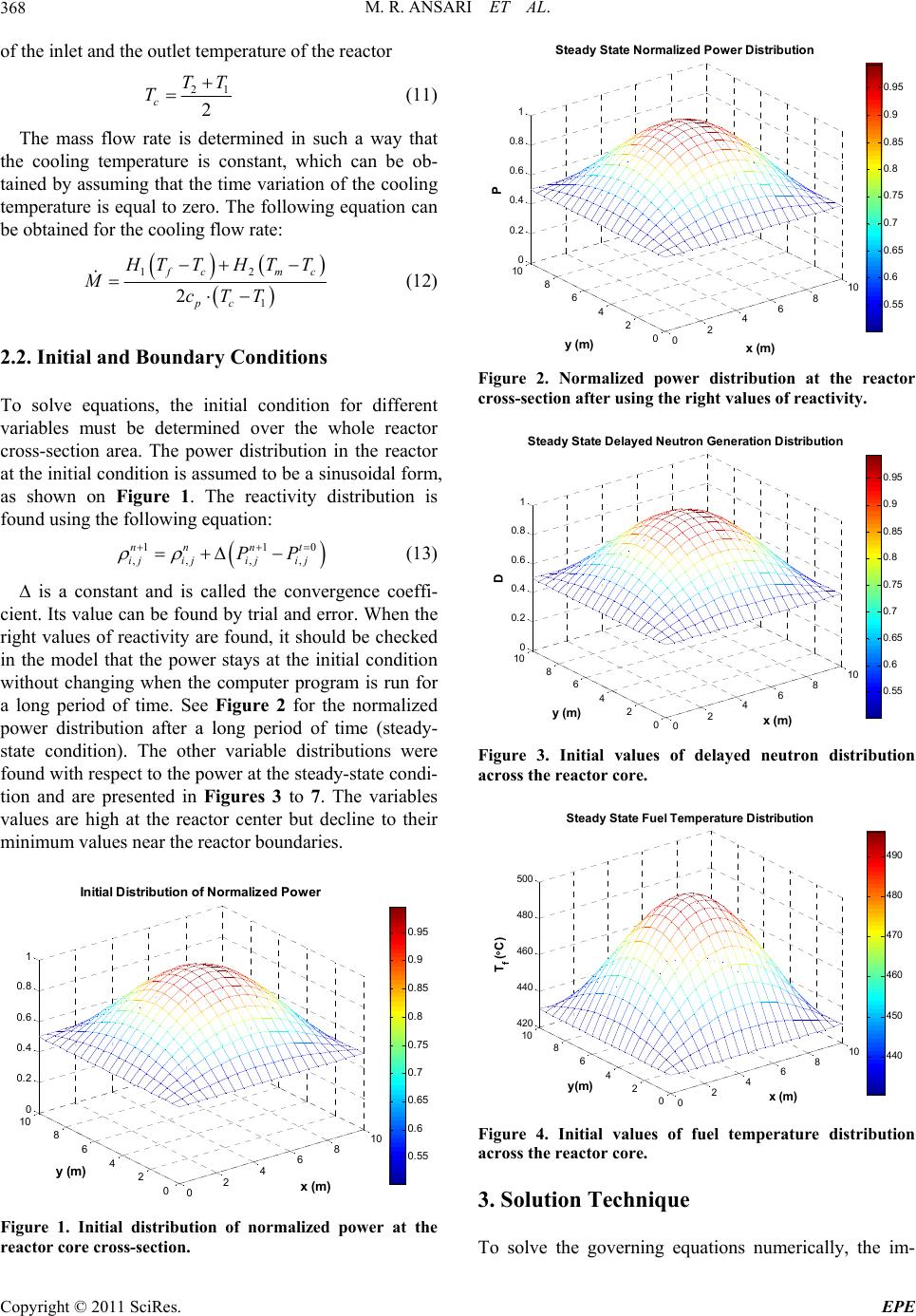
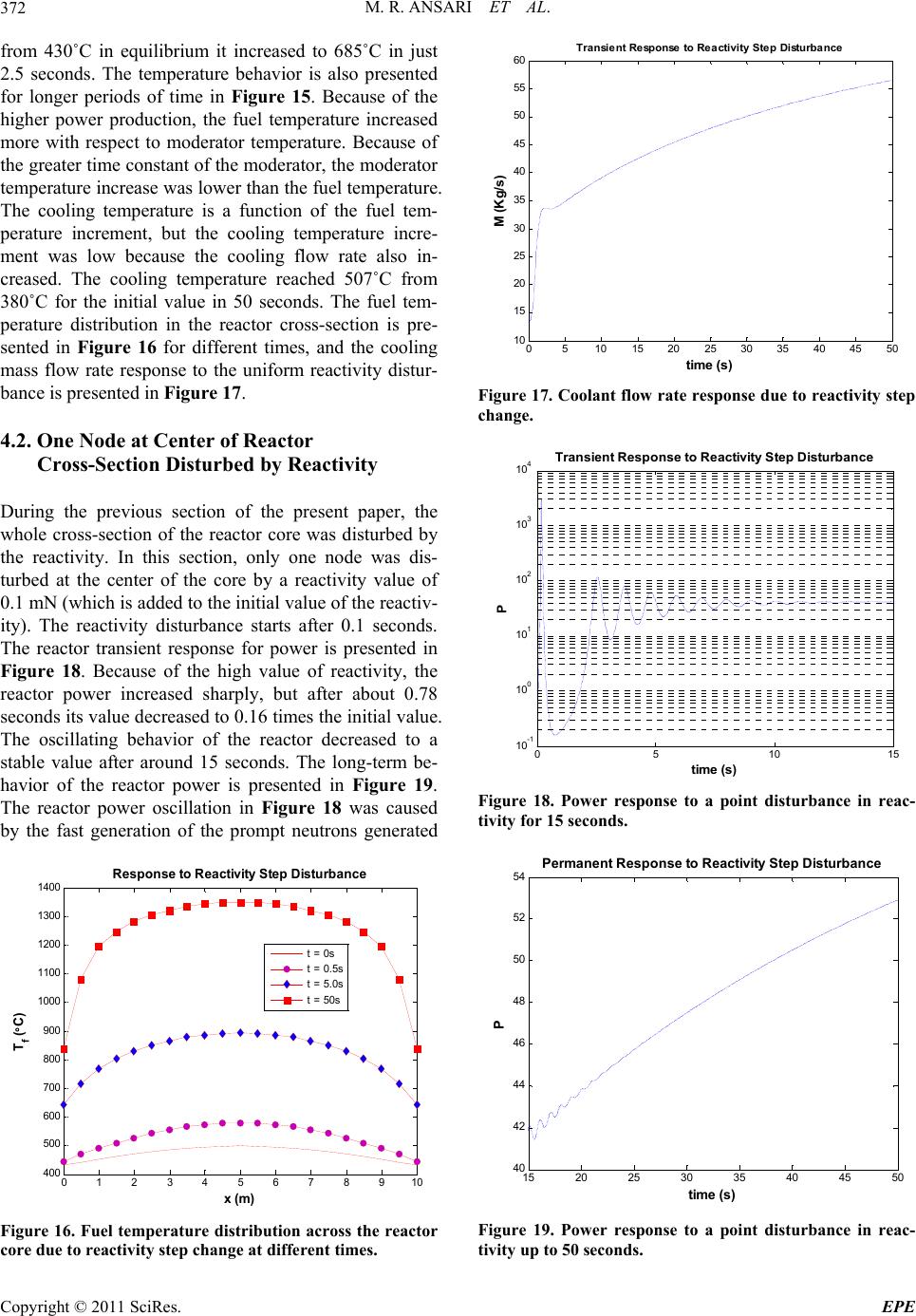
Tra nsient Response to Reactivity Step Disturba nce
T
f
T
c
T
m
Figure 24. Transient behavior of fuel, coolant and modera
tor to symmetric reactivity disturbance at early time. -
15 20 25 30 35 40 45 50
0
1000
2000
3000
4000
5000
6000
7000
time (s)
T (
C)
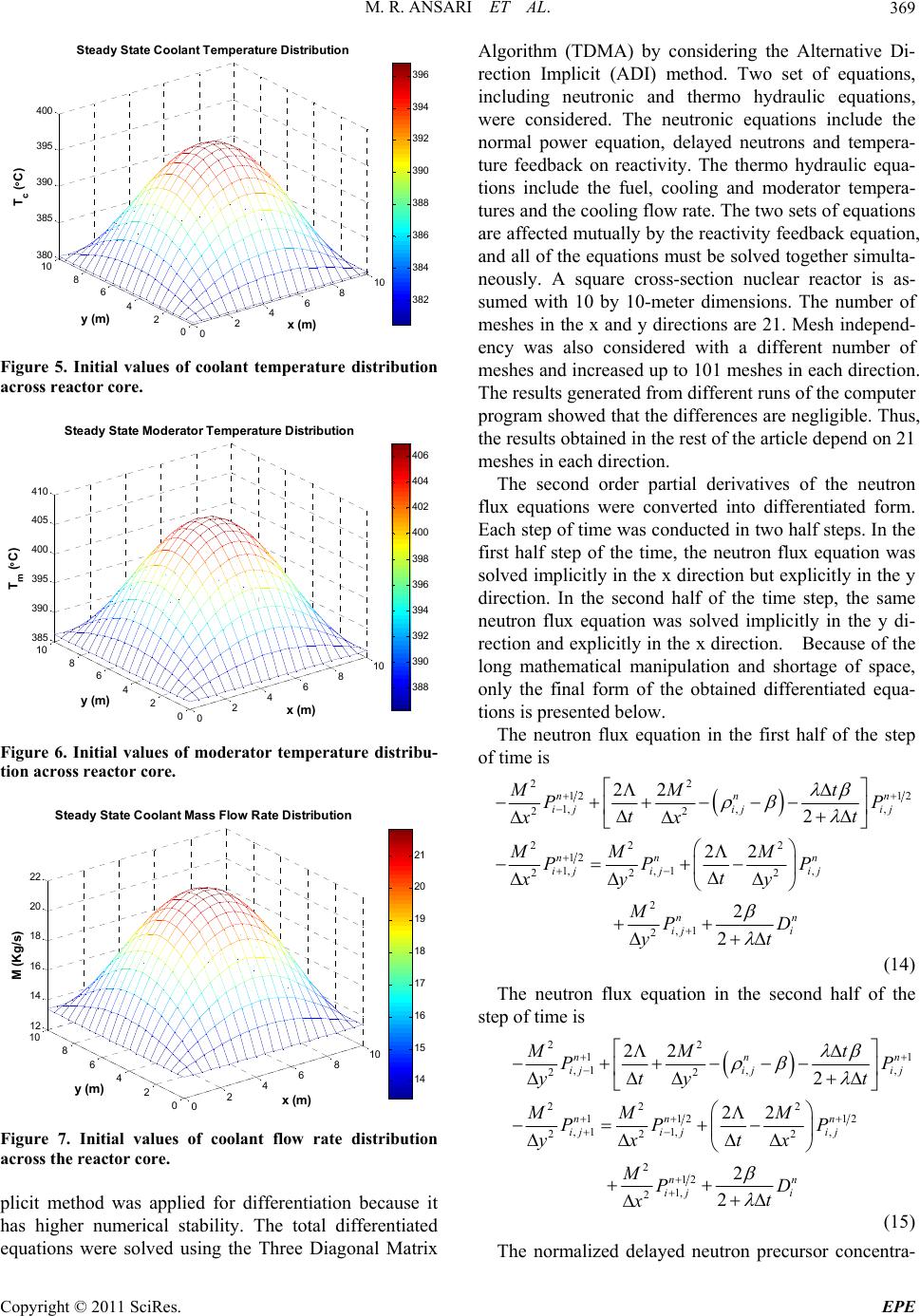
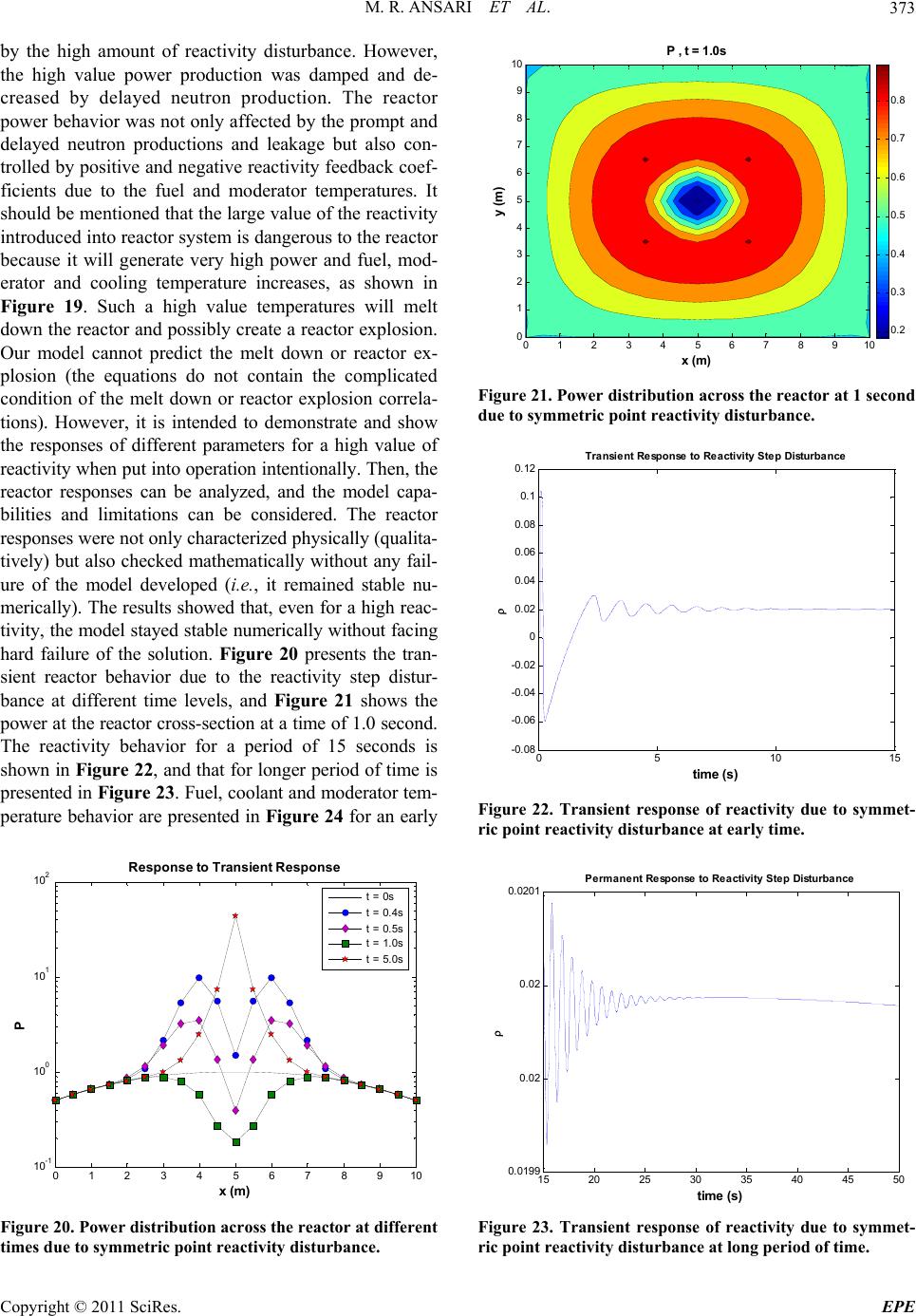
Perm anent Response to Re activity Ste p Disturba nce
T
f
T
c
T
m
VVE
Figure 25. Transient behavior of fuel, coolant and modera
tor to symmetric reactivity disturbance at long period o
nd Figure 25 for a longer period of time.
ime representative equations
ped for future power generation. The model be-
ha
ough the vari-
ab
showed that the
te
jor Systems Codes, Capabilities and Limi-
tations,” EPRI, WS-8-212, 1981.
hase Flow Fundamen-
.2 Model on Trip off One Main Coolant Pump for
-
f
time.
time a
5. Conclusions
wo-dimensional tT
a
were
nalyzed for nuclear power reactor kinetics and thermo
hydraulic behavior for large AGR nuclear power genera-
tion. The governing equations used in modeling of the
reactor included neutron diffusion, delayed neutron pre-
cursor concentration and thermo-hydraulic equations for
fuel, moderator and cooling temperatures. The equations
were solved numerically using the finite difference
method. The reactor transient response was demonstrated
for reactivity disturbances in different conditions. For
this reason, the initial reactivity was established for the
steady-state condition. The initial reactivity values are
the reactivity amounts that do not change the reactor
power and maintain all the variables at steady-state val-
ues. Higher values of the reactivity were imposed as fol-
lows.
1) A nuclear reactor AGR type with 2000 MWe was
develo
ved well physically (qualitatively) and numerically
during critical conditions without failure.
2) The reactivity of all nodes was increased by 0.01.
The reactor response showed that even th
les increased, however, the negative feedback coeffi-
cient and delayed neutron generation prevented the reac-
tor system from the critical condition. Nevertheless, if
this condition were continued, for a reactor without a
control system, the fuel rod temperature would increase,
and the reactor would end with crisis.
Only the center node reactivity disturbance increased
to a value of 0.1. The reactor response
mperature increased to very high values. This behavior
could lead to fuel rod melting and explosion, even
though this model is not prepared to predict these crises.
6. References
[1] W. Wulff, “Ma
[2] DOE/EPRI, “Physical Benchmarking Exercise,” 2nd
International Workshop, of Two-P
tals, Rensselar Polytechnic Institute, Troy, NY, USA,
1987.
[3] P. Groudev and A. Stefanova, “Validation of RELAP5/
MOD3
R 440/V230,” Nuclear Engineering and Design, Vol.
236, No. 12, 2006, pp. 1275-1281.
doi:10.1016/j.nucengdes.2005.11.011
[4] H. Arab-Alibeik and S. Setayeshi, “An Adaptive-Cost-
Function Optimal Controller Design for a PWR Nuclear
Reactor,” Annals of Nuclear Energy, Vol. 30, No. 6, 2003,
pp. 739-754. doi:10.1016/S0306-4549(02)00116-0
[5] H. Arab-Alibeik and S. Setayeshi, “Adaptive Control of a
PWR Core Power Using Neural Networks,” Annals of
Nuclear Energy, Vol. 32, No. 6, 2005, pp. 588-605.
doi:10.1016/j.anucene.2004.11.004
[6] M. Marseguerra, E. Zio and R. Canetta, “Using Gen
Algorithms for Calibrating Simplifie
etic
d Models of Nuclear
Reactor Dynamics,” Annals of Nuclear Energy, Vol. 31,
No. 11, 2004, pp. 1219-1250.
doi:10.1016/j.anucene.2004.03.001
[7] L. Wengfeng, L. Zhengpei, L.
Three-Dimensional Power Distribut
Fu and W. Yaqi, “The
ion Control in Load
Following of the Heating Reactor,” Annals of Nuclear
Energy, Vol. 28, No. 8, 2001, pp. 741-754.
doi:10.1016/S0306-4549(00)00091-8
[8] I. S. Sadek and R. V. Vendetham, “Optima
Distributed Nuclear Reactors with P
l Control of
ointwise Control-
Copyright © 2011 SciRes. EPE