M. JAHANSHAHI
Copyright © 2011 SciRes. IJIS
7
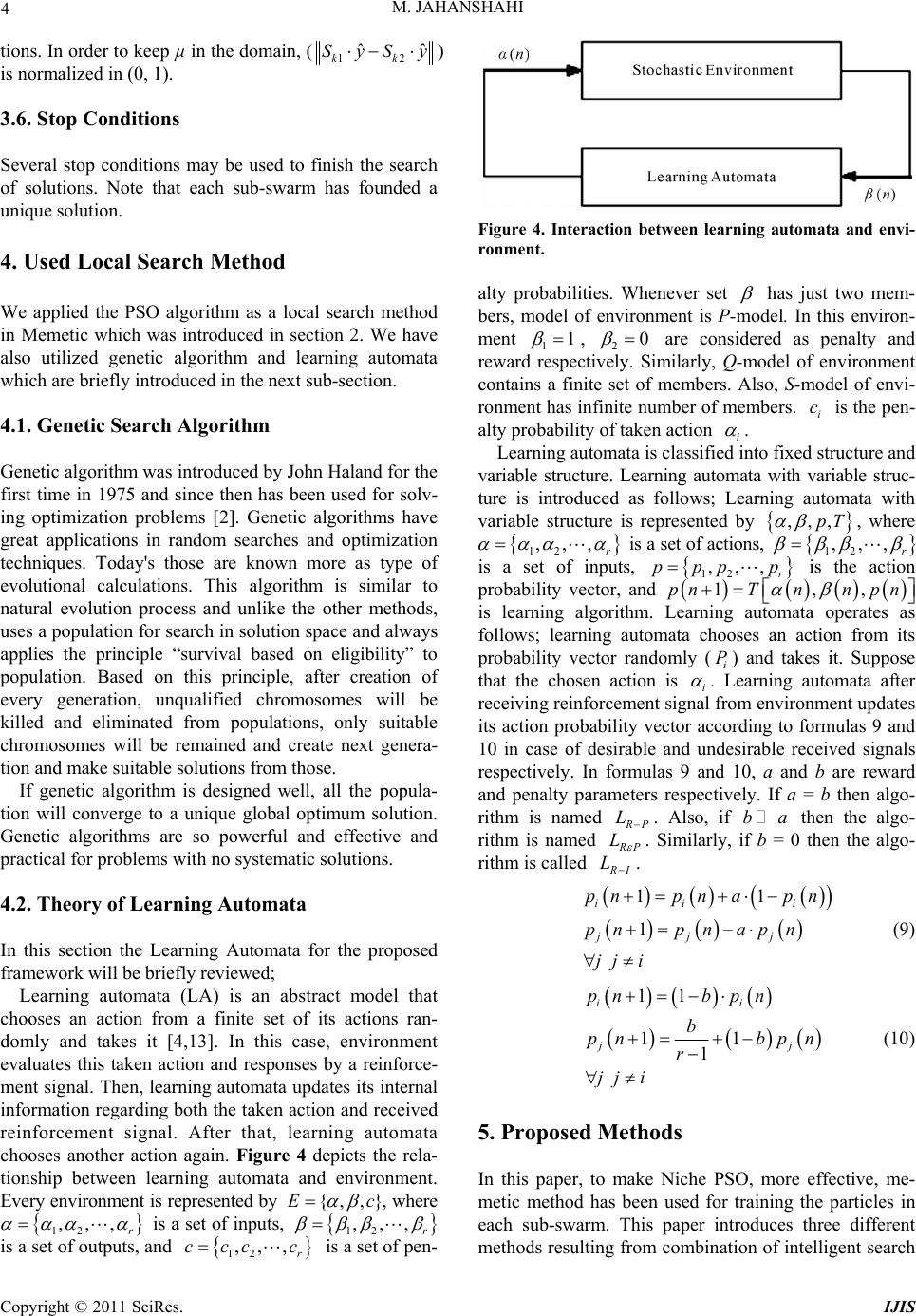
Table 1. Diversity rate of particles in various algorithms in 10 times of simulations.
GA1 GA2 PSO-based Niche PSO
LA (
P
) LA (
I
)
0.0391 0.0309 0.0302 0.0296 0.0331 0.0331
0.0363 0.032 0.0359 0.0284 0.0315 0.0315
0.0311 0.0377 0.0319 0.0321 0.0397 0.0315
0.0299 0.0269 0.031 0.0357 0.0314 0.0314
0.0299 0.0297 0.0315 0.0265 0.0391 0.0329
0.0413 0.0316 0.0267 0.0268 0.0301 0.0301
0.0292 0.0384 0.0329 0.0256 0.0336 0.0336
0.0292 0.0327 0.0267 0.0272 0.0311 0.0397
0.0285 0.0279 0.0272 0.0292 0.0299 0.0329
0.0308 0.0283 0.0397 0.0329 0.0391 0.0317
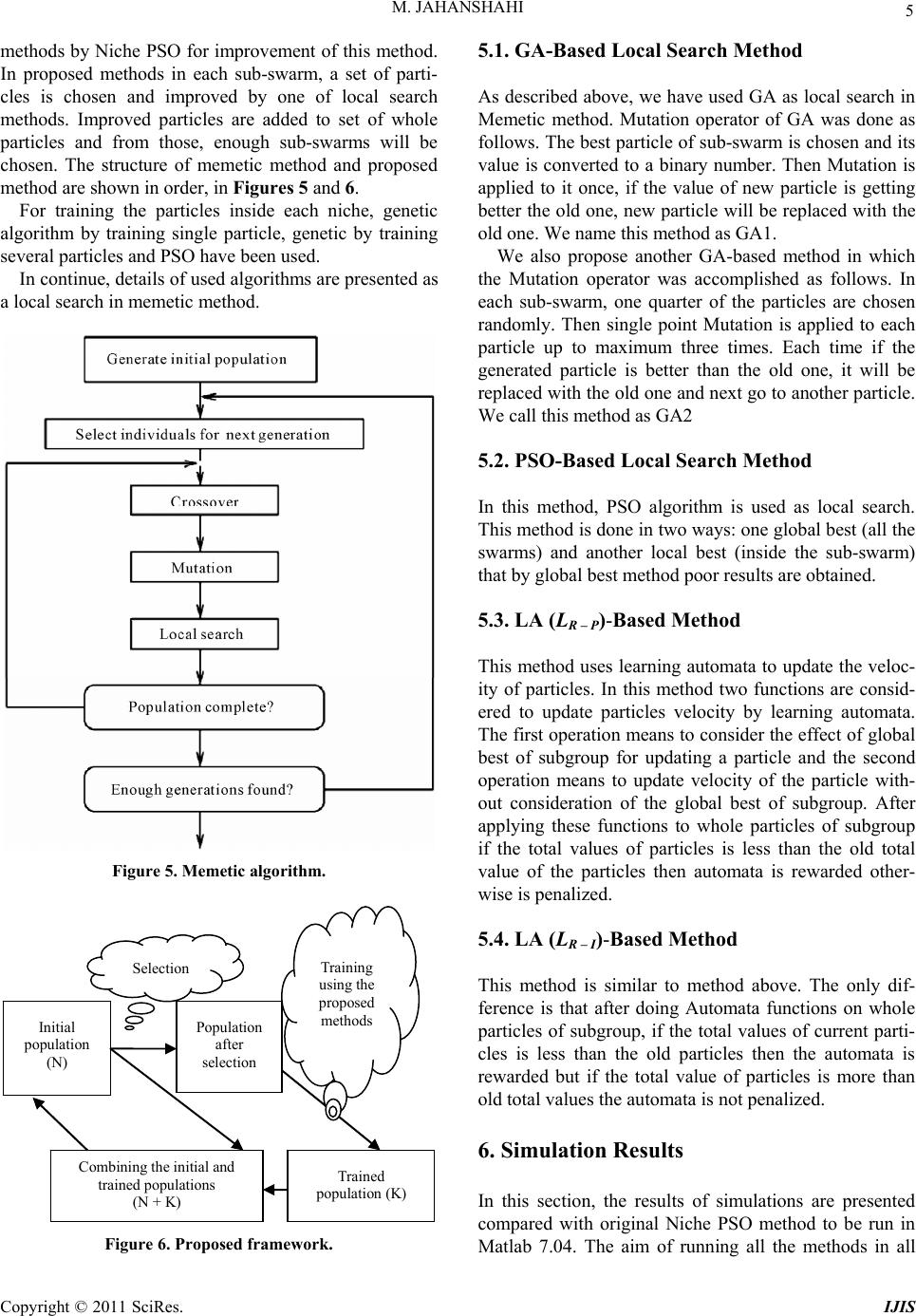
Table 2. Divergence rate of different algorithms.
LA (
I
) LA (
P
) Niche PSO PSO-based GA2 GA1
5 11 12 15 8 12
to raise the diversity of particles and improvement of
convergence of NichePSO as two assessment factors of
search methods. From the results, LA (
P
L)- and LA
(
I
L)-based methods outperform other methods in terms
of diversity and convergence rates, respectively.
8. References
[1] R. Brits, A. P. Engelbrecht and F. van den Bergh, “A
Niching Particle Swarm Optimizer,” Proceedings of the
IEEE Swarm Intelligence Symposium, Indianapolis, 24 -
26 April 2003, pp. 54-59,
[2] P. Moscato, “Genetic Algorithms and Martial Arts to-
wards Memetic Algorithm,” Calteth Concurrent Compu-
tation Program Report 826, Moscato, 1989.
[3] J. Kennedy and R. C. Eberhart, “Particle Swarm Optimi-
zation,” Proceedings of IEEE International Conference
on Neural Networks, Piscataway, 27 November - 1 De-
cember 1995, pp. 1942-1948.
[4] M. A. L. Thathachar and P. S. Sastry, “Varieties of
Learning Automata: An Overview,” IEEE Transaction on
Systems, Man, and Cybernetics-Part B: Cybernetics, Vol.
32, No. 6, 2002, pp. 711-722.
[5] A. Stacey, M. Jancic and I. Grundy, “Particle Swarm
Optimization with Mutation,” Proceedings of the Con-
gress on Evolutionary Computation, Canberra, 8 - 12
December 2003, pp. 1425-1430.
[6] Y. Shi and R. C. Eberhart, “A Modified Particle Swarm
Optimizer,” IEEE International conference on Evolu-
tionary Computation, Anchorage, 4 - 9 May 1998.
[7] M. Clerc, “Discrete Particle Swarm Optimization,” New
Optimization Techniques in Engineering, Springer-Verlag,
New York, 2004.
[8] P. Yin, “A Discrete Particle Swarm Algorithm for Opti-
mal Polygonal Approximation of Digital Curves,” Jour-
nal of Visual Communication and Image Representation,
Vol. 12, No. 2, 2004, 241-260.
[9] G. Venter and J. Sobieszczanski-Sobieski, “Multidisci-
plinary Optimization of a Transport Aircraft Wing Using
Particle Swarm Optimization,” Structural and Multidisci-
plinary Optimization, Vol. 26, No. 1, 2004, pp. 121-131.
[10] G. C. Onwubolu and M. Clerc, “Optimal Path for Auto-
mated Drilling Operations by a New Heuristic Approach
Using Particle Swarm Optimization,” International
Journal of Production Research, Vol. 4, No. 3, 2004, pp.
473-491. doi:10.1080/00207540310001614150
[11] F. Bergh and A. P. Engelbrecht, “A New Locally Con-
vergent Particle Swarm Optimizer,” IEEE International
Conference on Systems, Man and Cybernetics, Tunisia,
2002.
[12] T. I. Zohdi, “Computational Design of Swarms,” Interna-
tional Journal for Numerical Methods in Engineering,
Vol. 57, No. 15, 2003, pp. 2205-2219.
doi:10.1002/nme.762
[13] M. Jahanshahi, M. R. Meybodi and M. Dehghan, “Cellu-
lar Learning Automata Based Scheduling Method for
Wireless Sensor Networks,” Proceedings of the 14th In-
ternational CSI Computer Conference (CSICC’09),
Amirkabir University of Technology, Tehran, October
20-21, 2009, pp. 646-651.