 Advances in Pure Mathematics, 2011, 1, 238-242 doi:10.4236/apm.2011.14042 Published Online July 2011 (http://www.SciRP.org/journal/apm) Copyright © 2011 SciRes. APM Analytical Solution of Two Extended Model Equations for Shallow Water Waves by Adomian’s Decomposition Method Mehdi Safari Islamic Azad University, Aligoodarz Branch, Department of Mechanical En gineering, Aligoodarz, Iran E-mail: ms_safari2005@yahoo.com Received May 22, 2011; revised June 26, 2011; accepted July 5, 2011 Abstract In this paper, we consider two extended model equations for shallow water waves. We use Adomian’s de- composition method (ADM) to solve them. It is proved that this method is a very good tool for shallow water wave equations and the obtained solutions are shown graphically. Keywords: Adomian’s Decomposition Method, Shallow Water Wave Equation 1. Introduction Clarkson et al [1] investigated the generalized short wa- ter wave (GSWW) equation d t uxu0 x txxtt xx uuuu u (1) where and are non-zero constants. Ablowitz et al. [2] studied the specific case 4 and 2 where Equation (1) is reduced to 42 d0 x txxtt xtx uuuuu uxu 33 d0 x txxt txt x uuuuxu (2) This equation was introduced as a model equation which reduces to the KdV equation in the long small amplitude limit [2,3].However, Hirota et al. [3] exam- ined the model equation for shallow water waves uu (3) obtained by substituting 3 in (1). Equation (2) can be transformed to the bilinear forms 23 10 3 xt txxtsx DD DDDDDDff 30 x DDD ff 20 tx x D Dff (4) where s is an auxiliary variable, and f satisfies the bilin- ear equation xs (5) However, Equation (3) can be transfo rmed to the bilinear form xt DD D (6) where the solution of the equation is ,2ln x uxt f (7) , xt 1 ,1 , nn n is given by the perturbation expansion where xtf xt (8) is a bookkeeping non-small parameter, and where , nxt 1, 2,,nn, are unknown functions that will be determined by substituting the last equation into the bilinear form and solving the resulting equations by equating different powers of to zero. The customary definition of the Hirota’s bilinear op- erators are given by ,, , nm tx nm DDab axtbxt xxtt tt xx (9) Some of the properties of the D-operators are as follows 23 22 24 22 2 22 2 63 42 2 dd,3 d ,3,ln 15 15 ttx ttxtt xx tx x t xxx Df fDDf f uxxu uxux ff DffDffDDff uuu f ff f Df fuuuu f (10)  M. SAFARI 239 ln, where ,2 x f xt 4 uxt (11) Also extended model of Equation (2) is obtained by the operator D to the bilinear forms (4) and (5) 30 x D ff 23 1 3 xt txxxts DD DDDDDD (12) where s is an auxiliary variable, and satisfies the bi- linear equation 30 x D ff 6 0 xxx x u uu 4 xs DD (13) Using the properties of the D operators given above, and differentiating with respect to x we obtain the ex- tended model for Equation (2) given by 42 d x t xxttx tx uuuuu uxu (14) In a like manner, we extend Equation(3) by adding the operator D 23 0 x D ff 6 0 xxx x u uu Fug t to the bilinear forms (6) to obtain xt txx DD DDD (15) Using the properties of the D operators given above we obtain the extended model for Equation(3) given by 33 d x t xxttx tx uuuuu uxu (16) In this paper, we use the Adomian’s decomposition method (ADM) to obtain the solution of two considered equations above for shallow water waves. Large classes of linear and nonlinear differential equations, both ordi- nary as well as partial, can be solved by the ADM [4-15]. A reliable modification of ADM has been done by Wazwaz [16].The decomposition method provides an effective procedure for analytical solution of a wide and general class of dynamical systems representing real physical problems [4-14].This method efficiently works for initial-value or boundary-value problems and for lin- ear or nonlinear, ordinary or partial differential equations and even for stochastic systems. Moreover, we have the advantage of a single global method for solving ordinary or partial differential equations as well as many types of other equations. 2. Basic idea of Adomian’s Decomposition Method We begin with the equation LuR u (17) where L is the operator of the highest-ordered derivatives with respect to t and R is the remainder of the linear op- erator. The nonlinear term is represented by u. Thus we get LugtR uFu 1 L (18) The inverse is assumed an integral operator given by 1 0 d t t Lt 1 L (19) The operating with the operator on both sides of Equation (18) we have 1 0 ufLgtRuFu 0 (20) is the solution of homogeneous equation where 0Lu (20) involving the constants of integration. The integration constants involved in the solution of homogeneous equa- tion (21) are to be determined by the initial or boundary condition according as the problem is initial-value prob- lem or boundary-value problem. The ADM assumes that the unknown function ,uxt 0 ,, n n uxtu xt can be expressed by an infinite series of the form (22) and the nonlinear operator u 0n n can be decomposed by an infinite series of polynomials given by uA (23) ,uxt nnwill be determined recurrently, and where are the so-called polynomials of uu defined by 01 ,,, n u 00 1d ,0,1,2, !d nii nn AnF un n 42 d 6 x txxttx t xxxx x LuLuuLuLuLux LuL uuLu (24) 3. ADM Implement for First Extended Model of Shallow Water Wave Equation We consider the application of ADM to first extended model of shallow water wave equation. If Equation (14) is dealt with this method, it is formed as (25) where 333 223 ,, , xxt xxxt xxx LLLL x txtx 1 0 d t t Lt (26) If the invertible operator is applied to Equation (25), then Copyright © 2011 SciRes. APM  M. SAFARI 11 6 ttt xxtt x xxxx LLu LLuuLu LuL uuLu Copyright © 2011 SciRes. APM 240 42 d x x t LuLux 2 d x x t Lu Lux 0 ,, n n u xt 0 00 00 , , ,d ,, , n n n n n xt uxt u xtx u xt uxt (27) is obtained. By this 1 ,,0 4 6 txxt t x xxxx uxtuxL LuuLu LuL uuLu (28) is found. Here the main point is that the solution of the decomposition method is in the form of uxt (29) Substituting from Equation (29) in Equation(28), we find 1 0 00 00 ,,0 4, 2, 6, nt xxtn n nt nn x xn t nn xn xxx nn nx nn uxtuxL Lu uxtL Lu xtL Lu xtL uxtL (30) is found. According to Equation (19) approximate solution can be obtained as follows: 2 0 1s ec , ch uxt c 11 21 22 cx c (31) 1 3 11 sinh 21 ,11 cosh 21 uxtc c 2 11 1 1 cc xtcc cc xc 1111 1 2d 6d tx x t LuLu x t (32) 21 0 111 ,4 xxt t xxxx x uxtLuuLu LuLuuLu (33) Thus the approximate solution for first extended model of shallow water wave equation is obtained as 2 ,,uxtuxt uxt uxt (34) The terms 012 ,, ,,,uxtuxtuxtin Eq ob (31), (32), (33). d Extended e- x uLu (35) where uation (34), 01 ,, tained from Eqs. 4. ADM Implement for Secon Model of Shallow Water Wave Equation re we consider the application of ADM to second exH tended model of shallow water wave equation. If Equa- tion (16) is dealt with this method, it is formed as 33 d6 x txxttx tx xxx L uLuuLuLuL uxLuLu 33 23 ,, , x xxtxxx L LL tx t L tx (36) If the invertible operator 1 0 d t t Lt is applied to Eq uation (35), then 33 d 6 x tx t xxxx x uuLuLuLux LuL uuLu (37) is obtained. By this 11 tt t xxt LLu LL 133 d 6 x txxttxt xxxx x LLuuLuLuLux LuL uuLu (38) is found. Here the main point is that the solution o 0n (39) Substituting from Equation (39) in Eq fin 1 00 00 00 00 00 ,,0 , 3, , 3, ,d ,, 6, , ntxxtn nn ntn nn x xn tn nn xn xxxn nn nxn nn uxtuxLLuxt uxtLuxt LuxtLuxtx LuxtLuxt uxtL uxt (40) ,,0uxt ux f the decomposition method is in the form of ,, n uxtu xt uation (38), we d 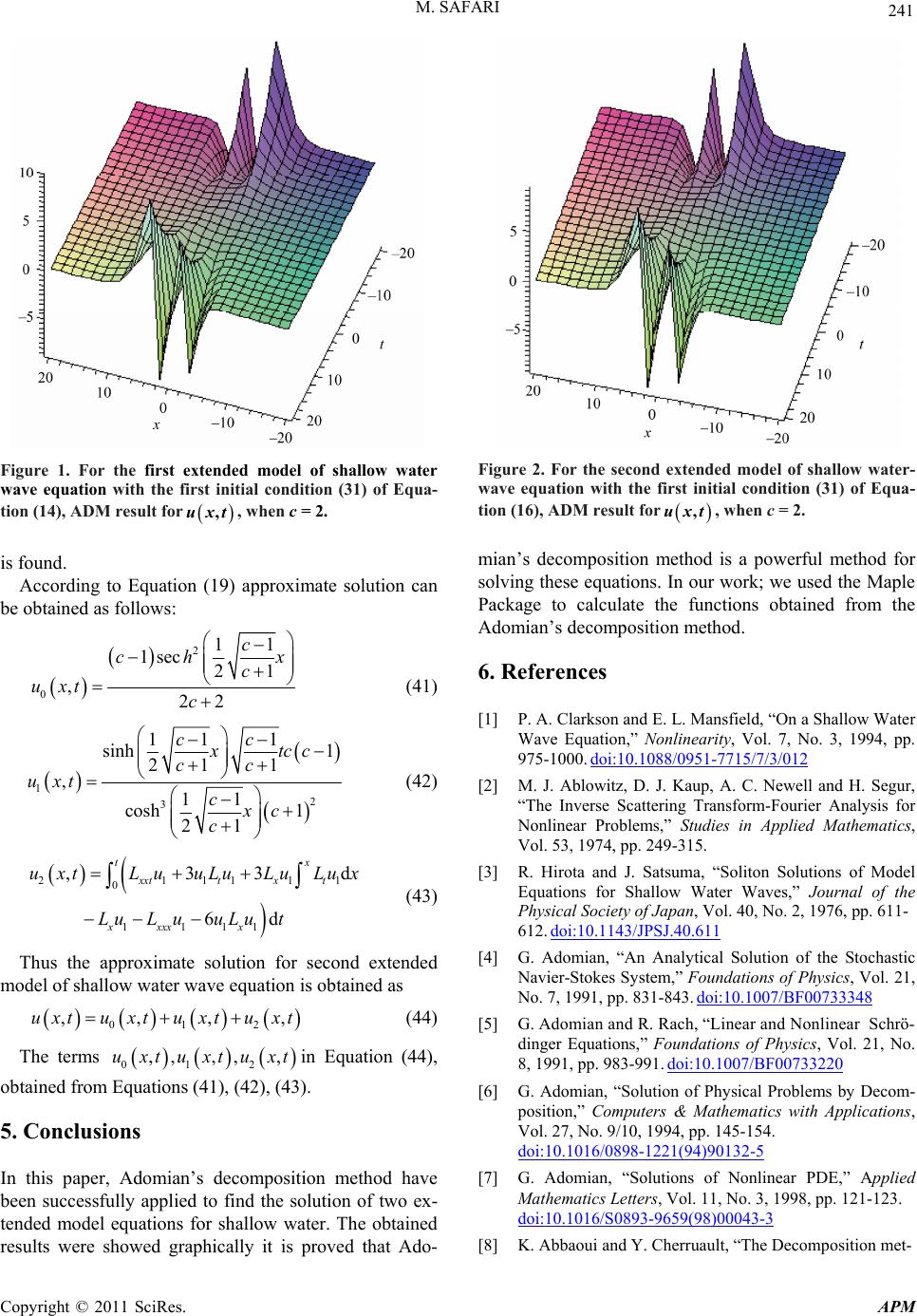 M. SAFARI Copyright © 2011 SciRes. APM 241 Figure 1. For the first extended model of shallow water wave equation with the first initial condition (31) of Equa- tion (14), ADM result for uxt,, when c = 2. is found. According to Equation (19) approximate solution can be obtained as follows: 2 0 1s ec , ch uxt c 11 21 22 cx c (41) 12 311 cosh 1 21 cxc c 11 1 sinh 1 21 1 , cc xtcc cc uxt (42) 1111 3d x x t LuLu x (43) Thus the approximate solution for second extended model of shallow water wave equation is obtained as 2 ,,xtu xt 2 ,, ,xtuxtin Equation (44), obtained from Equations (41), (42), (43). 5. Conclusions In this paper, Adomian’s decomposition method been successfully applied to find the solution of tw tended model equations for shallow water. The obtained results were showed graphically it is proved that Ado- 1 0 ,3 t xxt t uxtLuuLu 11 11 6d xx xx x Lu L uuLut 2 01 ,,uxtuxtu (44) The terms 01 ,,uxtu have o ex- Figure 2. For the second extended model of shallow water- wave equation with the first initial condition (31) of Equa- tion (16), ADM result for uxt,, when c = 2. mian’s decomposition method is a powerful method for solving these equa tions. In our work; we used th e Maple Package to calculate the functions obtained from the Adomian’s decomposition method. 6. References [1] P. A. Clarkson and E. L. Mansfield, “On a Shall ow Wate r Wave Equation,” Nonlinearity, Vol. 7, No. 3, 1994, pp. 975-1000. doi:10.1088/0951-7715/7/3/012 [2] M. J. Ablowitz, D. J. Kaup, A. C. Newell and H. Segur, “The Inverse Scattering Transform-Fourier Analysis for Nonlinear Problems,” Studies in Applied Mathematics, Vol. 53, 1974, pp. 249-315. pan, V [3] R. Hirota and J. Satsuma, “Soliton Solutions of Model Equations for Shallow Water Waves,” Journal of the Physical Society of Jaol. 40, No. 2, 1976, pp. 611- 612.doi:10.1143/JPSJ.40.611 [4] G. Adomian, “An Analytical Solution of the Stochastic Navier-Stokes System,” Foundations of Physics, Vol. 21, No. 7, 1991, pp. 831-843. doi:10.1007/BF00733348 [5] G. Adomian a nd R. Rach, “Linear and Nonl inear Schrö- dinger Equations,” Foundations of Physics, Vol. 21, No. 3-991. doi:10.1007/BF007332208, 1991, pp. 98 Solution of Physical Problems by Decom-[6] G. Adomian, “ position,” Computers & Mathematics with Applications, Vol. 27, No. 9/10, 1994, pp. 145-154. doi:10.1016/0898-1221(94)90132-5 [7] G. Adomian, “Solutions of Nonlinear PDE,” Applied Mathematics Letters, Vol. 11, No. 3, 1998, pp. 121-123. doi:10.1016/S0893-9659(98)00043-3 [8] K. Abbaoui and Y. Cherruault, “The Decomposition met- 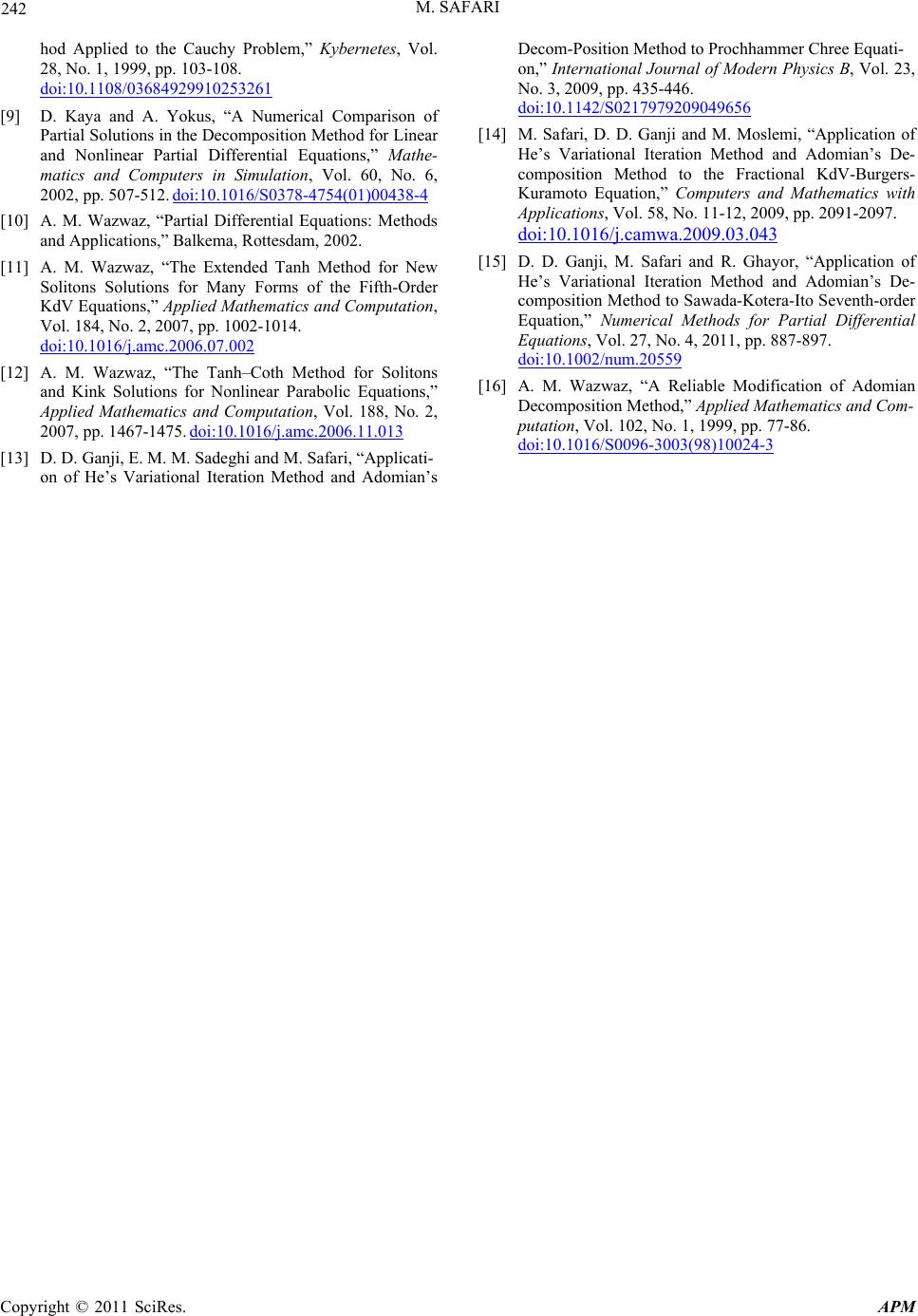 M. SAFARI Copyright © 2011 SciRes. APM 242 hod Applied to the Cauchy Problem,” Kybernetes, Vol. 28, No. 1, 1999, pp. 103-108. doi:10.1108/03684929910253261 [9] D. Kaya and A. Yokus, “A Numerical Comparison of o. 6, Partial Solutions in the Decomposition Method for Linear and Nonlinear Partial Differential Equations,” Mathe- matics and Computers in Simulation, Vol. 60, N 2002, pp. 507-512. doi:10.1016/S0378-4754(01)00438-4 [10] A. M. Wazwaz, “Partial Differential Equations: Methods and Applications,” Balkema, Rottesdam, 2002. [11] A. M. Wazwaz, “The Extended Tanh Method for New Solitons Solutions for Many Forms of the Fifth-Order KdV Equations,” Applied Mathematics Vol. 184, No. 2, 2007, pp. 1002-1014 and Computation, . doi:10.1016/j.amc.2006.07.002 [12] A. M. Wazwaz, “The Tanh–Coth Method for Solitons and Kink Solutions for Nonlinear Pa rabolic Equations,” Applied Mathematics and Computation, Vol. 188, No. 2, 2007, pp. 1467-1475. doi:10.1016/j.amc.2006.11.013 [13] D. D. Ganji, E. M. M. Sadeghi and M. Safari, “Applicati- on of He’s Variational Iteration Method and Adomian’s 6 Decom-Position Method to Prochhammer Chree Equati- on,” International Journal of Modern Physics B, Vol. 23, No. 3, 2009, pp. 435-446. doi:10.1142/S021797920904965 ith [14] M. Safari, D. D. Ganji and M. Moslemi, “Application of He’s Variational Iteration Method and Adomian’s De- composition Method to the Fractional KdV-Burgers- Kuramoto Equation,” Computers and Mathematics w Applications, Vol. 58, No. 11-12, 2009, pp. 2091-2097. doi:10.1016/j.camwa.2009.03.043 [15] D. D. Ganji, M. Safari and R. Ghayor, “Application of He’s Variational Iteration Method and Adomian’s De- composition Method to Saw Equation,” Numerical Methods fo ada-Kotera-Ito Seventh-order r Partial Differential Equations, Vol. 27, No. 4, 2011, pp. 887-897. doi:10.1002/num.20559 [16] A. M. Wazwaz, “A Reliable Modification of Adomian Decomposition Method,” Applied Mathematics and Com- putation, Vol. 102, No. 1, 1999, pp. 77-86. doi:10.1016/S0096-3003(98)10024-3
|