Paper Menu >>
Journal Menu >>
 Energy and Power En gi neering, 2011, 3, 271-275 doi:10.4236/epe.2011.33034 Published Online July 2011 (http://www.SciRP.org/journal/epe) Copyright © 2011 SciRes. EPE A Control Method for SVG Based on Differential Geometry Nonlinear Control Qi-Yong Pan1, Jin Wu2, Yi-Huai Wang2, Jing-Fei Ni2, Shan Zhong3 1College of Physics & Electronic Engineering, Changshu Institute of Technology, Changshu, China 2College of Computer Science & Technology, Soochow University, Suzhou, China 3 Computer Science and Engineering Colleg e, Changshu Institute of Technology, Changshu, China E-mail: panqiyong_1971@163.com Received April 24, 2011; revised May 10, 2011; accepted May 17, 2011 Abstract The control method for SVG is researched in this paper. Based on the working mechanism of SVG, the logic switch function is introduced to establish the dynamic mathematic model. A differential geometry variable control method is provided and the differential geometry linear theory is used to convert the nonlinear sys- tem to a linear system. Then based on the former work the control of SVG is devised. Finally, the control of SVG is simulated and the result shows the differential geometry nonlinear control is robust and stable com- parative to the traditional PID control method and it is an effective to control the SVG. Keywords: Mathematic Model, Nonlinear, Differential Geometry, Control 1. Introduction Static Var Generator (SVG) as one of the flexible AC transmission systems (FACTS) devices can dynamically compensate the reactive power, and the characters of the smooth reactive power adjusting and the rapid dynamics performance makes it obtained the widely attention from inside and outside of the country [1-3]. The devising of the control model for SVG is the key problem of SVG. In the respective works, the literature [4] established the single nonlinear equivalent circuit model, [5] built the dynamic model of SVG based on the three phase and using the ratio coefficient K to describe the relations of network side voltage and the direct ca- pacity voltage, without the considering of working mechanism and the dynamical behaviors. With the development of the modern control theory, the control method is widely used such as the advanced PID control, the nonlinear robust control, predicting fuzzy control, inverse control and the neutral control [6]. And the above control parameters are generally using the ex- perience, but some parameters of SVG is unpredictable, and sometimes is changed according with the time, so the optimum control parameters is hard to be obtained and the system control quality is also difficult to be satisfied. In order to make the system have the relative perfect compensation performance and the relative high control precise. Through the dynamics of the SVG, the dynamic mathematics of SVG is established, and based on the dynamic mathematics model, the control method based on differential geometry structure and using the differen- tial geometry precise linear theory, the nonlinear system is converted to the linear system, and then the control is devised by applying the nonlinear variable structure con- trol theory exponent tending law. Finally, the control system is analyzed by using the differential geometry control method and improving the control precise. 2. The Dynamic Mathematics of SVG The main circuit structure of SVG is showed as Figure 1, and IGCT [7] is used as the main switch tube of voltage inverter. On suppose of the research precise is not affected, the below condition is assumed: 1) Power switch device is the ideal switch; 2) Grid voltage is the three phase cosine voltage; 3) All the losses of devices including the loss of con- verter itself and the loss of transformer are denoted using equivalent resistance R; 4) The leakage of transformer and the connecting re- actance is using the equivalent inductance L to represent; 5) Ignore the voltage harmonics wave weight of invert AC side.  Q.-Y. PAN ET AL. 272 a e b e c e Figure 1. Circuit configuration of SVG. The three-phase voltage is as Equation (1): cos 2 cos π 3 2 cos π 3 a abc bm c t u uuU t u t (1) In the Equation (1), is the max value of system linear voltage. m U The voltage of inverter AC side is showed as Equation (2): cos 22 cos π 33 2 cos π 3 a abc bdc c t e ee Kut e t (2) In Equation (2), where K is the ratio of inverter output linear voltage with the direct current side voltage, and is the phrase of device voltage and the system voltage. In order to better analyze, the logic switch function is introduced, the states of three bridge arm is using a, b and c to represent, when the condition are turning on the above bridge arm and turning off the be- low bridge arm, the a, b and c are 1, and while the condition are turning off the above bridge arm and turning on the below bridge arm, the , and are 0. i G G GG G GG a Gb Gc G According to the Kirchhoff’s voltage law, the a-phase loop equation is as Equation (3): 0 d d aaaNN i LRiuu t a u (3) When a = 1 then0aNN ; while Guu0 a G then . So Equation (2) can be written as bellow: 0 aN u 0 d d aadcaN i LRiuGu t a u (4) The b and c phase equation also can be obtained, as for the three-phase input, there is no midline, so 0 abc iii , If the three phase power voltage is in balance, then 0 1 3 N abcd uGGG c u (5) The inverter is comprised of six power switch tubes showed in Figure 1, and the on-off rule is as the same bridge arm can be on at the same time. Combined with the above switch function, the three bridge arm just has two states as “1” and “0”. 1, 3 and 5 T forms eight models such as 000, 010, 011, 100, 101, 110 and 111. The switch model of 000 and 111 make the output voltage of invert as 0, so the two switch models is at the state 0. T T The Kirchhoff current rule is applied in direct current side capacitance positive node as Equation (6) d d dc dc dcaa bbcc L uu CiGiGiG tR (6) For the circuit equation, it is very complex at the co- ordinate at a, b and c, the d-q transform is used in the equation of the three-phase voltage current, and the transform matrix is showed as below: 22 cos cosπcos π 33 22 sin sinπsin π 33 22 2 22 2 tt t Ctt t 2 3 (7) Then the mathematics model of SVG in the coordinate d-q is showed as Equation (8): cos dsin d cos sin0 1 0 0 d q dc dc dc dm q dc RK LL iRK i tL uKK CC iU iL u L (8) 3. The Differential Geometry Nonlinear Control of SVG 3.1. The Control Theory of Differential Geometry for Nonlinear System For the given multi-variable nonlinear system: Copyright © 2011 SciRes. EPE  Q.-Y. PAN ET AL.273 i 1 ,1,, m i i jj X fXgX u y hX jm (9) In the Equation (9), X is the local coordinate defined on the n-dimension fluent C M , and are the vector field; is the mapping of C1 , ,,m fg g h in M as : h j M R, and is the output. y If i is the max positive integer satisfied the below conditions, then r 11 1 1 ,,0, ,,0, 1, ii i rr gf igmf i k k gfigmfii i LLhXLLhXX M LLh XLLhXkrXM (10) In the Equation (10), is the 1 i rfi LhX 1 i r order inverse derivative of i to hX f X while is the inverse derivative of 1 i r gm fi LLhX X 1 i rfi Lh to vector field g X, where and DX EX are showed as follows: 1 1 1 1 11 11 1 1 11 ,, ,, m m r r gf gm r r gf mgmm LLhXLL hX DX LLhX LLhX 1 1 m rf rfm Lh X EX Lh X Definition 1. The sufficient and necessary condition for the decoupling of nonlinear system is the matrix is non-singular, and the feedback control rule is as follows: DX 1 1 ][uX XvDXEXDX v (11) So the system is decoupled on M showed as Equa- tion (12) ,1,2,, jj X fXgXx gXXv yhXj m (12) 3.2. The Entire Linearizing of SVG According to the Equation (8), the dynamic model of SVG is the non-linear couple relation. Therefore, the decoupling should be satisfied at first. The state variable is defined as 1d x i, 2q x i and 3dc x u, using T sin cosu yi to control the input, at the same time using 1d and 2q as the out- put. Therefore, the non-linear model of SVG can be rep- resented as the affine non-linear forms: yi 2 1 11 22 ii i X fXgXu yhX yhX (13) In the Equation (13), where 12 3 12 3 33 0 0 0 dc dc RK x xx LL RK fXxx gXx LL KK x x CC The affine non-linear system such as Equation (9), according to the Equation (10), the below equations can be obtained: 110 g LhX ; 210 g LhX; 11fR Lh Xxx L2 ; 113gf K LLh Xx L ; 213gf dc K LLhXx C ; 210 g LhX; 220 g Lh X; 21fR Lh Xxx L 2 ; 123gf K LLhXx L ; 223gf dc K LLhXx C ; From the above equations we can know the matrix DX is not singular and satisfying the conditions for decoupling of input and output. The state equations on the new coordinate are as bel- lows: 12 11 22 11 1 12 22 22 22 2 fgf fgf zz zLhXLLhXu zz zLhX LLhXu (14) Copyright © 2011 SciRes. EPE 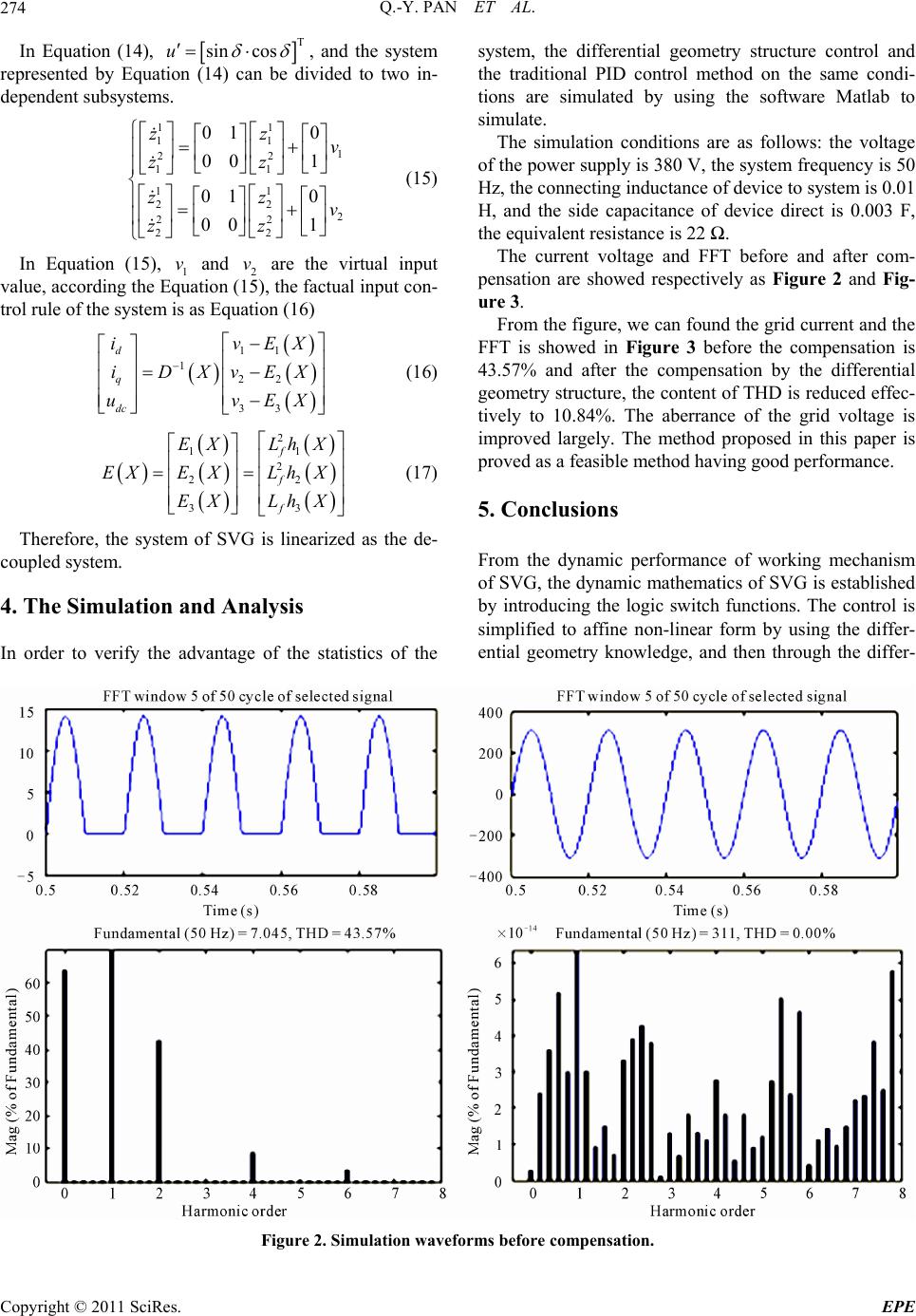 Q.-Y. PAN ET AL. Copyright © 2011 SciRes. EPE 274 In Equation (14), T sin cosu , and the system represented by Equation (14) can be divided to two in- dependent subsystems. system, the differential geometry structure control and the traditional PID control method on the same condi- tions are simulated by using the software Matlab to simulate. 11 11 1 22 11 11 22 2 22 22 01 0 001 01 0 001 zz v zz zz v zz (15) The simulation conditions are as follows: the voltage of the power supply is 380 V, the system frequency is 50 Hz, the connecting inductance of device to system is 0.01 H, and the side capacitance of device direct is 0.003 F, the equivalent resistance is 22 Ω. The current voltage and FFT before and after com- pensation are showed respectively as Figure 2 and Fig- ure 3. In Equation (15), 1 and 2 are the virtual input value, according the Equation (15), the factual input con- trol rule of the system is as Equation (16) v v From the figure, we can found the grid current and the FFT is showed in Figure 3 before the compensation is 43.57% and after the compensation by the differential geometry structure, the content of THD is reduced effec- tively to 10.84%. The aberrance of the grid voltage is improved largely. The method proposed in this paper is proved as a feasible method having good performance. 11 1 22 33 d q dc ivE iDXvEX uvE X X (16) 2 11 2 22 33 f f f EX LhX EXEXLh X EX LhX (17) 5. Conclusions Therefore, the system of SVG is linearized as the de- coupled system. From the dynamic performance of working mechanism of SVG, the dynamic mathematics of SVG is established by introducing the logic switch functions. The control is simplified to affine non-linear form by using the differ- ential geometry knowledge, and then through the differ- 4. The Simulation and Analysis In order to verify the advantage of the statistics of the Figure 2. Simulation waveforms before compensation. 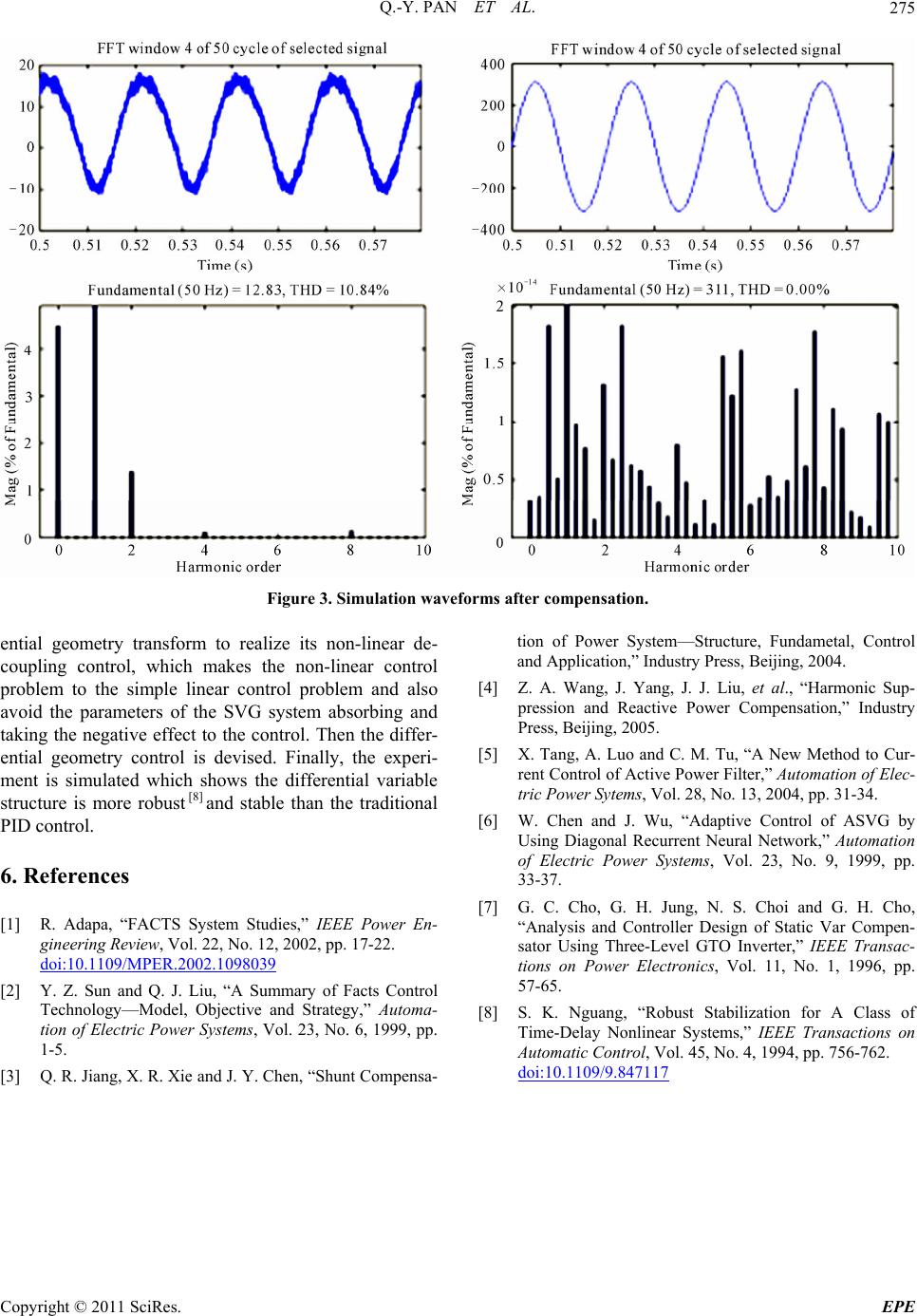 Q.-Y. PAN ET AL.275 Figure 3. Simulation waveforms after compensation. ential geometry transform to realize its non-linear de- coupling control, which makes the non-linear control problem to the simple linear control problem and also avoid the parameters of the SVG system absorbing and taking the negative effect to the control. Then the differ- ential geometry control is devised. Finally, the experi- ment is simulated which shows the differential variable structure is more robust [8] and stable than the traditional PID control. 6. References [1] R. Adapa, “FACTS System Studies,” IEEE Power En- gineering Review, Vol. 22, No. 12, 2002, pp. 17-22. doi:10.1109/MPER.2002.1098039 [2] Y. Z. Sun and Q. J. Liu, “A Summary of Facts Control Technology—Model, Objective and Strategy,” Automa- tion of Electric Power Systems, Vol. 23, No. 6, 1999, pp. 1-5. [3] Q. R. Jiang, X. R. Xie and J. Y. Chen, “Shunt Compensa- tion of Power System—Structure, Fundametal, Control and Application,” Industry Press, Beijing, 2004. [4] Z. A. Wang, J. Yang, J. J. Liu, et al., “Harmonic Sup- pression and Reactive Power Compensation,” Industry Press, Beijing, 2005. [5] X. Tang, A. Luo and C. M. Tu, “A New Method to Cur- rent Control of Active Power Filter,” Automation of Elec- tric Power Sytems, Vol. 28, No. 13, 2004, pp. 31-34. [6] W. Chen and J. Wu, “Adaptive Control of ASVG by Using Diagonal Recurrent Neural Network,” Automation of Electric Power Systems, Vol. 23, No. 9, 1999, pp. 33-37. [7] G. C. Cho, G. H. Jung, N. S. Choi and G. H. Cho, “Analysis and Controller Design of Static Var Compen- sator Using Three-Level GTO Inverter,” IEEE Transac- tions on Power Electronics, Vol. 11, No. 1, 1996, pp. 57-65. [8] S. K. Nguang, “Robust Stabilization for A Class of Time-Delay Nonlinear Systems,” IEEE Transactions on Automatic Control, Vol. 45, No. 4, 1994, pp. 756-762. doi:10.1109/9.847117 Copyright © 2011 SciRes. EPE |