Applied Mathematics
Vol.07 No.12(2016), Article ID:69049,14 pages
10.4236/am.2016.712117
Sectorial Approach of the Gradient Observability of the Hyperbolic Semilinear Systems Intern and Boundary Cases
Adil Khazari, Ali Boutoulout
Laboratory of Modeling Analysis & Computer Science (MACS), Department of Mathematics and Computer Science, Faculty of Sciences, Moulay Ismail University, Meknes, Morocco

Copyright © 2016 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 15 May 2016; accepted 23 July 2016; published 26 July 2016
ABSTRACT
The aim of this paper is to study the notion of the gradient observability on a subregion w of the evolution domain W and also we consider the case where the subregion of interest is a boundary part of the system evolution domain for the class of semilinear hyperbolic systems. We show, under some hypotheses, that the flux reconstruction is guaranteed by means of the sectorial approach combined with fixed point techniques. This leads to several interesting results which are performed through numerical examples and simulations.
Keywords:
Distributed Systems, Semilinear Hyperbolic Systems, Boundary Reconstruction, Regional Boundary Gradient Observability, Regional Gradient Observability, Gradient Observability, Fixed Point, Sectorial Operator

1. Introduction
The regional observability is one of the most important notions of systems theory. It consists to reconstruct the trajectory only in a subregion in the whole domain. This concept has been widely developed see [1] [2] . Afterwards, the concept of regional gradient observability for parabolic systems has been developed see [3] - [7] and for hyperbolic systems see [8] [9] , it concerns the reconstruction of the gradient conditions initials only in a critical subregion interior to the system domain without the knowledge of the conditions initials.
The aim of this papers is to study the regional gradient observability of an important class of semilinear hyperbolic systems. For the sake of brevity and simplicity, we shall focus our attention on the case where the dynamic of the system is a sectorial operator linear and generating an analytical semigroup  on the Hilbert space.
on the Hilbert space.
The plan of the paper is as follows: Section 2 is devoted to the presentation of problem of regional gradient of semilinear hyperbolic systems, and then we give definitions and propositions of this new concept. Section 3 concerns the sectorial approach. Section 4 concerns the numerical approach which gives algorithm can simulated by a numerical example.
2. Position of the Problem
Let  be an open bounded subset of
be an open bounded subset of . For
. For , we denote
, we denote ,
,  and we consider the following hyperbolic semi-linear system
and we consider the following hyperbolic semi-linear system
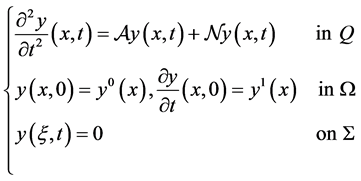 (1)
(1)
and the linear part of the system (1) is
 (2)
(2)
where  is an elliptic and second order operator and
is an elliptic and second order operator and  is a nonlinear operator assumed to be locally Lipschitzian, system (1) is augmented with the output function given by
is a nonlinear operator assumed to be locally Lipschitzian, system (1) is augmented with the output function given by
 (3)
(3)
where  (resp.
(resp.  if the subregion of interest is a boundary part
if the subregion of interest is a boundary part  of the system evolution domain
of the system evolution domain ) is a linear operator, and depends on the number q and the nature of the considered sensors. The observation space is
) is a linear operator, and depends on the number q and the nature of the considered sensors. The observation space is  and assumes that
and assumes that

 .
.
Let 
For  the system (2) is equivalent to
the system (2) is equivalent to
 (4)
(4)
and the system (1) is equivalent to
 (5)
(5)
augmented with the output function
 (6)
(6)
with  the system (4) has a unique solution see [10] - [12] that can be expressed as
the system (4) has a unique solution see [10] - [12] that can be expressed as ,
,
 is the semigroup generated by the operator
is the semigroup generated by the operator .
.
Let’s consider a basis of eigenfunctions of the operator , with the condition of Dirichlet which noted
, with the condition of Dirichlet which noted  and eigenvalues associated are
and eigenvalues associated are  with multiplicity
with multiplicity .
.
We can write for any 

The system (5) has a unique solution that can be expressed as follows see [13]
 (7)
(7)
then the output Equation (6) can be expressed by

Let  be the observation operator defined by
be the observation operator defined by

which is linear and bounded with the adjoint  given by
given by

Consider the operator  given by the formula
given by the formula

where

 (resp.
(resp.  if the subregion of interest is a boundary part
if the subregion of interest is a boundary part  of the system evolution domain
of the system evolution domain .)
.)
 is the adjoint of
is the adjoint of .
.
The initial condition  (initial state
(initial state  and initial speed
and initial speed ) and
) and  its gradient are assumed un- known. For
its gradient are assumed un- known. For  an open subregion of
an open subregion of , consider the restriction operators
, consider the restriction operators


with  is the adjoint of
is the adjoint of  (resp.
(resp.  is the adjoint of
is the adjoint of ).
).
(resp. For , consider
, consider

 and
and 
with  (resp.
(resp.  and
and ) is the adjoint of
) is the adjoint of  (resp.
(resp.  and
and ) which is the restriction operator.
) which is the restriction operator.
The trace operator is defined by

with

and  is the trace operator of order zero which is linear, continuous, and surjective.
is the trace operator of order zero which is linear, continuous, and surjective.  (resp.
(resp. ) denote the adjoint of operator
) denote the adjoint of operator  (resp.
(resp. ).
).
Finally, we reconstruct the operator as follows


Definition 1
・ The system (2) together with the output (3) is said to be exactly (resp. weakly) G-observable in  if
if
 (resp.
(resp. 
・ The system (2) together with the output (3) is said to be exactly (resp. weakly) G-observable in  if
if
 (resp.
(resp. ).
).
Remark 1.
・ If the system (2) together with the output (3) is exactly G-observable on  (resp. in
(resp. in ) then it is weakly G-observable on
) then it is weakly G-observable on .
.
・ For  the system (2) together with the output (3) is exactly (resp. weakly) G-observable on
the system (2) together with the output (3) is exactly (resp. weakly) G-observable on  then it is exactly (resp. weakly) G-observable on
then it is exactly (resp. weakly) G-observable on . see [9] .
. see [9] .
Definition 2 The semilinear system (1) augmented by the output function (3) is said to be gradient observable or G-observable on  (resp. in
(resp. in ) if we can reconstruct the gradient of its state and speed on a subregion
) if we can reconstruct the gradient of its state and speed on a subregion  of
of  (resp. in
(resp. in  of
of ).
).
Let the gradient  of the initial condition
of the initial condition  be decomposed as follows:
be decomposed as follows:
 (8)
(8)
where ,
,  and
and

Problem (*)
Given system (1) augmented by the output (3) on , is it possible to reconstruct
, is it possible to reconstruct  which is the gradient of initial condition of (1) in
which is the gradient of initial condition of (1) in ? (resp. on
? (resp. on .)
.)
3. Sectorial Case
In this section, we study Problem (*) under some supplementary hypothesis on  and the nonlinear operator
and the nonlinear operator .
.
With the same notations as in the previous case, we reconsider the semilinear system described by the Equ- ation (5) augmented by the output (6) where one suppose that the operator  generates an analytic semigroup
generates an analytic semigroup
 in the state space E.
in the state space E.
Let’s consider  such that
such that  with a is a positive real number and
with a is a positive real number and 
denotes the real part of spectrum of . Then for
. Then for , we define the fractional power
, we define the fractional power  as a closed operator with domain
as a closed operator with domain  which is a dense Banach space on E endowed with the graph norm
which is a dense Banach space on E endowed with the graph norm

Let us consider  then the objective is to study the Problem (*) in V endowed with the norm
then the objective is to study the Problem (*) in V endowed with the norm
 (9)
(9)
we have

where c is a constant. For more details, see ( [2] [11] [14] ).
For , assume that
, assume that
 (10)
(10)
and the operator  is well defined and satisfies the following conditions:
is well defined and satisfies the following conditions:
 (11)
(11)
This hypothesis are verified by many important class of semi linear hyperbolic systems. Various examples are given and discussed in ( [14] - [16] ).
We show that there exists a set of admissible initial gradient states and admissible initial gradient speed, admissible in the sense that allows to obtain system (2) weakly G-observable.
Let’s consider

given by

where  is the restriction in
is the restriction in  and
and  is the residual part of the initial gradient condition
is the residual part of the initial gradient condition  given by (8). we assume that
given by (8). we assume that
 (12)
(12)
then we have the following result
Proposition 1 Suppose that the system (2) is weakly G-observable on , and (10), (11) and (12) satisfied, then the following assertion hold:
, and (10), (11) and (12) satisfied, then the following assertion hold:
・ There exists  and
and  such that for all
such that for all  the function
the function  has a unique
has a unique
fixed point  in the ball
in the ball  solution of the system (5).
solution of the system (5).
・ There exist  and
and  such that
such that , the mapping f is Lipschitzian where
, the mapping f is Lipschitzian where

Proof.
・ Since , then there exists
, then there exists  such that
such that

and we have .
.
Let us consider  and
and  in
in  and
and  we have
we have

where

Using Holder’s inequality we take

and using (11), we have

On the other hand, we have

but we have

and

Using Holder’s inequality, we obtain

then we have


and

where .
.
Finally

Let’s consider ,
,
and ,
,  , then
, then .
.
It is sufficient to take  and
and , then for all
, then for all  we have
we have 
・ Let  and
and  be the solution of the system (5) corresponding respectively to the initial gradient condition, we suppose that we have the same residual part (
be the solution of the system (5) corresponding respectively to the initial gradient condition, we suppose that we have the same residual part ( ), then for
), then for  we have
we have

but we have

and we deduce that
 (13)
(13)
Finally, f is Lipschitzian in .
.
Remark 2 The given results show that there exists a set of admissible gradient initial state. If the gradient initial state is taken in , with a bounded residual part then the system (5) has only one solution in
, with a bounded residual part then the system (5) has only one solution in .
.
Here, we show that if the measurements are in , with
, with  is suitably chosen then the gradient initial state can be obtained as a solution of a fixed point problem.
is suitably chosen then the gradient initial state can be obtained as a solution of a fixed point problem.
Let us consider the mapping
 (14)
(14)
and assume that .
.
Then we have the following result.
Proposition 2 Assume that
 (15)
(15)
 (16)
(16)
and if the linear system (2) is weakly G-observable on Γ and (11) holds, then there exists a2 > 0 and , such that for all
, such that for all  , the function (14) admit a unique fixed point in
, the function (14) admit a unique fixed point in  which correspond to the gradient initial condition
which correspond to the gradient initial condition  observed on
observed on . Furthermore, the function
. Furthermore, the function  is Lipschitzian.
is Lipschitzian.
Proof. Let us consider  and
and  in
in , using ((9),(11), (13), (15) and (16)) we have
, using ((9),(11), (13), (15) and (16)) we have

Or , then there exists
, then there exists  such that
such that

and we have .
.
Then we obtain

On the other hand, using the inequalities (11), (15) and (16), we have

Let’s consider .
.
In order to have , it suffices to consider
, it suffices to consider .
.
For , we have
, we have

which gives

Then

which shows that h is Lipschitzian.
Remark 3 We can consider the regional intern problem in a subregion  of
of  (see [17] ).
(see [17] ).
4. Numerical Approach
We show the existence of a sequence of the initial gradient state and initial gradient speed which converges respectively to the regional initial gradient state and initial gradient speed to be observed on .
.
Proposition 3 We suppose that the hypothesis of the proposition (3.2) are verified, then for , the sequence of the initial gradient condition defined in
, the sequence of the initial gradient condition defined in  by
by
 (17)
(17)
converges to  the regional initial gradient condition (the regional initial gradient state
the regional initial gradient condition (the regional initial gradient state  and the regional initial gradient speed
and the regional initial gradient speed ) to be observed on
) to be observed on . where
. where  is the residual part of the initial gradient condition.
is the residual part of the initial gradient condition.
Proof. We have,

or , then
, then 
 ,
, 

Then  is a Cauchy sequence on V and is convergent.
is a Cauchy sequence on V and is convergent.
We consider  and
and  with
with

we have .
.
So

then

which show that the sequence  converges to
converges to  in Y on the other hand, we have
in Y on the other hand, we have

hence  converges to the regional initial gradient
converges to the regional initial gradient  to be observed on
to be observed on .
.
Algorithm
Let’s consider , then we have
, then we have
 and
and .
.
Thus, we obtain the following algorithm:

5. Simulations
In this part, we give a numerical illustrating example and the simulations are related to the choice of the subregion, the sensor location.
5.1. Internal Subregion Target
Consider the one dimensional semilinear hyperbolic system
 (18)
(18)
augmented with the output function described by a pointwise sensor located in  and
and 
 (19)
(19)
where  is a complete set of
is a complete set of . Let’s consider
. Let’s consider

Using the previous algorithm, we obtain the following figures.
・ Figure 1 shows that the estimate gradient state is very close to the real initial gradient state in .
.
・ Figure 2 shows that the estimate gradient speed is very close to the real initial gradient speed in .
.
5.2. Boundary Subregion Target
Consider the two dimensional system described in  by
by
 (20)
(20)
where  is a complete set of
is a complete set of .
.
The system (20) augmented by output function described by a pointwise sensor located in b.
 (21)
(21)

Figure 1. The estimated initial gradient state in .
.

Figure 2. The estimated initial gradient speed in .
.

Figure 3. The estimated initial gradient state on .
.

Figure 4. The estimated initial gradient speed on .
.
with
・  , the sensor located at
, the sensor located at .
.
・  is the intern region.
is the intern region.
・  is the boundary region.
is the boundary region.
・ The initials gradient conditions

to be observed on .
.
Using the previous algorithm, we obtain the following results:
・ Figure 3 shows that the estimate boundary gradient state is very close to the real initial boundary gradient state on .
.
・ Figure 4 shows that the estimate boundary gradient speed is very close to the real initial boundary gradient speed on .
.
6. Conclusion
The question of the regional internal and boundary gradient observability for semilinear hyperbolic systems was discussed and solved using the sectorial approach, which used sectorial properties of dynamical operators, the fixed point techniques and the properties of the linear part of the considered system. Many questions remain open, such as the case of the regional gradient observability of semilinear systems using Hilbert Uniqueness Method (HUM) and the constrained observability of semilinear hyperbolic system.
Cite this paper
Adil Khazari,Ali Boutoulout, (2016) Sectorial Approach of the Gradient Observability of the Hyperbolic Semilinear Systems Intern and Boundary Cases. Applied Mathematics,07,1326-1339. doi: 10.4236/am.2016.712117
References
- 1. Zerrik, E., Bourray, H. and Boutoulout, A. (2002) Regional Boundary Observability, Numerical Approach. International Journal of Applied Mathematics and Computer Science, 12, 143-151.
- 2. Zerrik, E., Bourray, H. and El Jai, A. (2007) Regional Observability for Semilinear Distributed Parabolic Systems. Journal of Dynamical and Control Systems, 3, 413-430.
- 3. Boutoulout, A., Bourray, H. and El Alaoui, F.Z. (2013) Boundary Gradient Observability for Semilinear Parabolic Systems: Sectorial Approach. Mathematical Sciences Letters, 2, 45-54.
http://dx.doi.org/10.12785/msl/020106 - 4. Boutoulout, A., Bourray, H. and El Alaoui, F.Z. (2012) Regional Gradient Observability for Distributed Semilinear Parabolic Systems. Journal of Dynamical and Control Systems, 18, 159-179.
http://dx.doi.org/10.1007/s10883-012-9138-3 - 5. Zerrik, E. and Bourray, H. (2003) Gradient Observability for Diffustion System. International Journal of Applied Mathematics and Computer Science, 13, 139-150.
- 6. Zerrik, E., Bourray, H. and El Jai, A. (2003) Regional Flux Reconstruction for Parabolic Systems. International Journal of Systems Science, 34, 641-650.
http://dx.doi.org/10.1080/00207720310001601028 - 7. Boutoulout, A., Bourray, H., Benhadid, S. and El Alaoui, F.Z. (2014) Regional Gradient Observability for Distributed Semilinear Parabolic Systems. International Journal of Control, 87, 1-13.
- 8. Boutoulout, A. and Khazari, A. (2013) Gradient Observability for Hyperbolic System. International Review of Automatic Control (IREACO), 6, 263-274.
- 9. Boutoulout, A., Bourray, H. and Khazari, A. (2014) Flux Observability for Hyperbolic Systems. Applied Mathematics & Information Sciences, 2, 13-24.
- 10. Pazy, A. (1990) Semigroups of Linear Operators and Applications to Partial Differential Equations. Springer-Verlag, New York.
- 11. Zeidler, E. (1990) Nonlinear Functional Analysis and Its Applications II/A Linear Applied Functional Analysis. Springer, Berlin.
- 12. Curtain, R.F. and Zwart, H. (1995) An Introduction to Infinite Dimensional Linear Systems Theory. Texts in Applied Mathematics, Springer-Verlag, New York, 138.
http://dx.doi.org/10.1007/978-1-4612-4224-6 - 13. Lions, J.L. (1988) Contr?labilité Exacte, Perturbations et Stabilisation de Systèmes Distribués. Tome 1, Masson, Paris.
- 14. Henry, D. (1981) Geometric Theory of Semilinear Parabolic Systems. Lecture Notes in Mathematics 840, Springer-Verlag Berlin Heidelberg New York.
http://dx.doi.org/10.1007/BFb0089647 - 15. Kassara, K. and El Jai, A. (1983) Algorithme pour la commande d'une classe de systmes paramtre rpartis non linaires. Revue Marocaine d’Automatique, d’Informatique et de Traitement de Signal, 1, 3-24.
- 16. Lions, J.L. and Magenes, E. (1968) Problèmes aux limites non homogènes et applications. Vols. 1 et 2, Dunod, Paris.
- 17. Khazari, A. and Boutoulout, A. (2014) Gradient Observability for Semilinear Hyperbolic Systems: Sectorial Approach. Intelligent Control and Automation, 6, 170-181.
http://dx.doi.org/10.4236/ica.2014.53019