Applied Mathematics
Vol.5 No.9(2014), Article ID:46147,6 pages
DOI:10.4236/am.2014.59130
F-Multiautomata on Join Spaces Induced by Differential Operators
Rajab Ali Borzooei1, Hamid Reza Varasteh2, Abbas Hasankhani3
1Department of Mathematics, Shahid Beheshti University, Tehran, Iran
2Department of Mathematics, Payame Noor University, Tehran, Iran
3Department of Mathematics, Islamic Azad University, Kerman Branch, Kerman, Iran
Email: borzooei@sbu.ac.ir, varastehhamid@gmail.com, abhasan@mail.uk.ac.ir
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


Received 15 February 2014; revised 22 March 2014; accepted 1 April 2014
ABSTRACT
In this paper, we introduce the notion of fuzzy multiautomata and we investigate the hyperstructures induced by the linear second-order differential operators which can be used for construction of fuzzy multiautomata serving as a theoretical background for modeling of processes.
Keywords:Fuzzy Systems, Differential Operators, Hyperalgebraic Structures, Multiautomata

1. Introduction
Hyperstructure theory was born in 1934 when Marty defined hypergroups as a generalization of groups. This theory has been studied in the following decades and nowadays by many mathematicians. The hypergroup theory both extends some well-known group results and introduces new topics, thus leading to a wide variety of applications, as well as to a broadening of the investigation fields. There are applications of algebraic hyperstructures to the following subjects: geometry, hypergraphs, binary relations, lattices, fuzzy sets and rough sets, automata, cryptography, combinatorics, codes, artificial intelligence, and probabilistic. A comprehensive review of the theory of hyperstructures appears in [1] -[3] .
Further, since the beginning of the first decade of this century relationships between ordinary linear differential operators and the hypergroup theory have been studied [4] -[8] .
Zadeh [9] introduced the theory of fuzzy sets and, soon after, Wee [10] introduced
the concept of fuzzy automata. Automata have a long history both in theory and application
and are the prime examples of general computational systems over discrete spaces.
Fuzzy automata not only provide a systematic approach for handling uncertainty in
such systems, but also can be used in continuous spaces [11] . In this paper, we
introduce F-multiautomaton, without output function, where the transition function
or next state function satisfies so called Fuzzy Generalized Mixed Condition (FGMC).These
 -multiautomata are systems that can be used for the
transmission of information of certain type. Then we construct
-multiautomata are systems that can be used for the
transmission of information of certain type. Then we construct
 -multiautomata of commutative hypergroups and join spaces
created from second order linear differential operators.
-multiautomata of commutative hypergroups and join spaces
created from second order linear differential operators.
2. Preliminaries
Let J be an open interval of real numbers, and
 be the group of all continuous functions from J to interval
be the group of all continuous functions from J to interval . In what follows we denote
. In what follows we denote
 that named differential operators of second order. And define
that named differential operators of second order. And define . Recall some basic notions of the hypergroup
theory. A hypergroupoid is a pair
. Recall some basic notions of the hypergroup
theory. A hypergroupoid is a pair
 where
where
 and
and
 is a binary hyperoperation on H. (Here
is a binary hyperoperation on H. (Here
 denotes the system of all nonempty subsets of (H)). If
denotes the system of all nonempty subsets of (H)). If
 holds for all
holds for all
 then
then
 is called a semihypergroup. If moreover, the reproduction axiom (
is called a semihypergroup. If moreover, the reproduction axiom ( , for any element
, for any element ) is satisfied, then the pair
) is satisfied, then the pair
 is called a hypergroup. Join spaces are playing an important role in theories of
various mathematical structures and their applications. The concept of a join space
has been introduced by Prenowitz [12] and used by him and afterwards together with
James Jantoisciak to reconstruct several branches of geometry. In order to define
a join space, we need the following notation: If
is called a hypergroup. Join spaces are playing an important role in theories of
various mathematical structures and their applications. The concept of a join space
has been introduced by Prenowitz [12] and used by him and afterwards together with
James Jantoisciak to reconstruct several branches of geometry. In order to define
a join space, we need the following notation: If
 are elements of a hypergroupoid
are elements of a hypergroupoid
 then we denote
then we denote
 and
and
 we intend the set
we intend the set .
.
Definition 2.1 [12] [13] A commutative hypergroup
 is called a join space (or commutative transposition hypergroup) if the following
condition holds for all elements
is called a join space (or commutative transposition hypergroup) if the following
condition holds for all elements
 of
of![]() :
:
By a quasi-ordered (semi)group we mean a triple
 where
where
 is a (semi) group and binary relation
is a (semi) group and binary relation
![]() is a quasi ordering (i.e. is reflexive and transitive) on the set G such that, for
any triple
is a quasi ordering (i.e. is reflexive and transitive) on the set G such that, for
any triple
 with the property
with the property
 also
also
 and
and
 hold.
hold.
The following lemma is called Ends-Lemma that is proved on [14] [15] .
Lemma 2.2 Let
 be a quasi-ordered semigroup. Define a hyperoperation
be a quasi-ordered semigroup. Define a hyperoperation

For all pairs of elements . Then
. Then
 is a semihypergroup which is commutative if the semigroup
is a semihypergroup which is commutative if the semigroup
 is commutative. If moreover,
is commutative. If moreover,
 is a group, then
is a group, then
 is a transposition hypergroup. Therefore, if
is a transposition hypergroup. Therefore, if
 is a commutative group, then
is a commutative group, then
 is a join space.
is a join space.
Proposition 2.3 For any pair of differential operators
 define a binary operation as below:
define a binary operation as below:

and define a quasi-ordered relation as following:

Then
 is a commutative ordered group with the unit element
is a commutative ordered group with the unit element
 □
□
Now we apply the simple construction of a hypergroup from Lemma 2.2 into this considered concrete case of differential operators:
For arbitrary pair of operators
 we put:
we put:

Then we obtain the following Corollary from Lemma 2. 2 immediately:
Corollary 2.4 For each , if
, if

Then
 is a commutative hypergroup and a join space.
is a commutative hypergroup and a join space.
Definition 2.5 [16] Let
![]() be a non-empty set,
be a non-empty set,
 be a (semi) hypergroup and
be a (semi) hypergroup and
 be a mapping such that, for all
be a mapping such that, for all , and
, and :
:
 (2.1)
(2.1)
Then
 is called a discrete transformation (semi)hypergroup or an action of the (semi)hypergroup
H on the set X. The mapping
is called a discrete transformation (semi)hypergroup or an action of the (semi)hypergroup
H on the set X. The mapping
 is usually said to be simply an action.
is usually said to be simply an action.
Remark 2.6 The condition (2.1) used above is called Generalized Mixed Associativity Condition, shortly GMAC.
Definition 2.7 [6] [7] (Quasi)multiautomaton without output is a triad , where
, where
 is a (semi)hypergroup, S is a non-empty set, and
is a (semi)hypergroup, S is a non-empty set, and
 is a transition map satisfying GMAC condition. The set S is called the state set
of the (quasi)multiautomaton M, the structure
is a transition map satisfying GMAC condition. The set S is called the state set
of the (quasi)multiautomaton M, the structure
 is called a input (semi)- hypergroup of the (quasi)multiautomaton M and
is called a input (semi)- hypergroup of the (quasi)multiautomaton M and
 is called a transition function. Elements of the set S are called states and the
elements of the set H are called input symbols.
is called a transition function. Elements of the set S are called states and the
elements of the set H are called input symbols.
3. (-Multi Automata
Definition 3.1 A fuzzy transformation (semi)hypergroup (or a fuzzy action) of (semi)hypergroup
H on S is a triple
 where
where
 is a non-empty set,
is a non-empty set,
 is a (semi)hypergroup, and
is a (semi)hypergroup, and
![]() is a fuzzy subset of
is a fuzzy subset of
 such that, for all
such that, for all
 and
and :
:
 (3.2)
(3.2)
Remark 3.2 The condition (3.2) used above is called Fuzzy Generalized Mixed Condition, shortly FGMC.
Definition 3.3
 -(quasi) multiautomaton without outputs is a triad
-(quasi) multiautomaton without outputs is a triad , where
, where
 is a (semi)hyper-group,
is a (semi)hyper-group,
 is a non-empty set and
is a non-empty set and
 is a fuzzy transition map satisfying FGMC condition.
is a fuzzy transition map satisfying FGMC condition.
Set S is called the state set and the hyperstructure
 is called the input (semi)hypergroup of the
is called the input (semi)hypergroup of the
 - (quasi)multiautomaton
- (quasi)multiautomaton
 and
and
![]() is called fuzzy transition function. Elements of the set
is called fuzzy transition function. Elements of the set
 are called states and the elements of the set
are called states and the elements of the set
![]() are called input symbols.
are called input symbols.
Definition 3.4
 -(quasi)multiautomaton
-(quasi)multiautomaton
 is said to be abelian (or commutative) if
is said to be abelian (or commutative) if

Example 3.5 Suppose that

 Let hyperoperation
Let hyperoperation
 on H and fuzzy transition function
on H and fuzzy transition function
 are defined as follows:
are defined as follows:
|
* |
a |
B |
|
a |
{a} |
{a,b} |
|
b |
{a,b} |
{b} |
And for all other ordered triples
 we define
we define . Then
. Then
 is a commutative
is a commutative
 - multiautomaton (Figure 1).
- multiautomaton (Figure 1).
4. (-Multi Automata on Join Spaces Induced by Differential Operators
Proposition 4.1: Let
 where, for all
where, for all
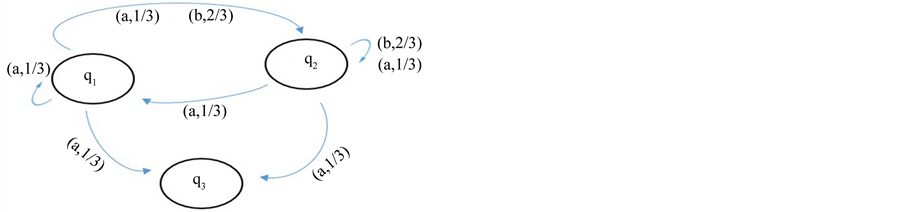
Figure 1. The
![]() -multiautomaton of Example 3.5.
-multiautomaton of Example 3.5.

And define:



Then
 is a commutative
is a commutative
 -multiautomaton.
-multiautomaton.
Proof: By Lemma 2.2 the hypergroupoid
 is a join space. Now, we prove this structure is satisfying FGMC property. Let
is a join space. Now, we prove this structure is satisfying FGMC property. Let
 𝒾
𝒾
and
 , for all
, for all
 and
and .
.
Then
𝒾

Clearly 𝒾 (since we can take
(since we can take
 or
or
 for each
for each ). Then FGMC property holds. Hence
). Then FGMC property holds. Hence
 is a
is a
 -multiautomaton. In addition, since
-multiautomaton. In addition, since , for all
, for all
 then
then
 is commutative. □
is commutative. □
Proposition 4.2: Let
 where hyperoperation
where hyperoperation
![]() was defined in proposition 4.1.
was defined in proposition 4.1.
And define:



Then
 is a commutative
is a commutative
 -multiautomaton.
-multiautomaton.
Proof: By Lemma 2.2 the hypergroupoid
 is a join space. Now, we prove this structure is satisfying FGMC property. Let
is a join space. Now, we prove this structure is satisfying FGMC property. Let
 𝒿
𝒿
and

for all,
 and
and .
.
Then
𝒿

Since
 for all
for all
 then 𝒿
then 𝒿 . Hence FGMC property holds. Therefore
. Hence FGMC property holds. Therefore
 is a
is a
 -multiautomaton. In addition, It is clear that
-multiautomaton. In addition, It is clear that
 is commutative.
is commutative.
Proposition 4.3: Let
 where, for all
where, for all :
:

And define:



Then
 is a commutative
is a commutative
 -multiautomaton.
-multiautomaton.
Proof: According to Corollary 2.4
 is a join space. Now we check the FGMC property for this structure. Let
is a join space. Now we check the FGMC property for this structure. Let

And
 , for all
, for all
 and
and .
.
Then


Since
 for all
for all
 then
then . Hence
. Hence
 is a
is a
 -multiautomaton. It is clear that
-multiautomaton. It is clear that
 is commutative.
□
is commutative.
□
Proposition 4.4: Let , where hyperoperation * was defined
in proposition 3.4.
, where hyperoperation * was defined
in proposition 3.4.
And define:



Then
 is a commutative
is a commutative
 -multiautomaton.
-multiautomaton.
Proof: According to Corollary 2.4
 is a join space. Now, we prove this structure is satisfying FGMC property. Let
is a join space. Now, we prove this structure is satisfying FGMC property. Let
 𝓂
𝓂

for all
 and
and .
.
Then
𝓂

Since
 and
and , for all
, for all
 then 𝓂
then 𝓂 . Hence
. Hence
 is a
is a
 multiautomaton. It is clear that
multiautomaton. It is clear that
 is commutative.
is commutative.
5. Conclusion
In this research, we introduced
 -multistructures which can be used for construction
of
-multistructures which can be used for construction
of
 -multiautomata serving as a theoretical background for
modeling of processes. Then we obtain some
-multiautomata serving as a theoretical background for
modeling of processes. Then we obtain some
 -multiautomata of linear second-order differential operators.
In future work, we can introduce
-multiautomata of linear second-order differential operators.
In future work, we can introduce
 -multiautomaton with output and concrete interpretations
of these structures can be studied.
-multiautomaton with output and concrete interpretations
of these structures can be studied.
References
- Corsini, P. and Leoreanu, V. (2003) Applications of Hyperstructure Theory. Kluwer Academic Publishers, Dordrecht. http://dx.doi.org/10.1007/978-1-4757-3714-1
- Corsini, P. (1993) Prolegomena of Hypergroup Theory. Aviani Editore, Tricesimo.
- Davvaz, B. and Leoreanu, V. (2008) Hyperring Theory and Applications. International Academic Press, USA.
- Chvalina, J. and Rakova, P. (2008) Join Spaces of Smooth Functions and Their Actions on Transposition Hypergroups of Second Order Linear Differential Operators. Journal of Applied Mathematics, 55-63.
- Chvalina, J. and Hoskova, S. (2007) Action of Hypergroups of the First Order Partial Differential Operators. 6th International Conference Aplimat, Department of Mathematics, FME Slovak University of Technology, Bratislava, 177- 184.
- Chvalina, J. (2008) Infinite Multiautomata with Phase Hypergroups of Various Operators. Proceedings of the 10th International Congress on Algebraic Hyperstructures and Applications, University of Defence, Brno, 57-69.
- Chvalina, J. and Chvalina, L. (2009) Action of Join Spaces of Continuous Functions on the Underlying Hypergroups of 2-Dimentional Linear Spaces of Functions. Journal of Applied Mathematics, 2, 24-34.
- Hoskov’a, S. and Chvalina, J. (2008) Multiautomata Formed by First Order Partial Differential Operators. Journal of Applied Mathematics, 1, 423-430.
- Zadeh, L.A. (1965) Fuzzy Sets. Inform and Control, 8, 338-353. http://dx.doi.org/10.1016/S0019-9958(65)90241-X
- Wee, W.G. (1967) On Generalization of Adaptive Algorithm and Application of the Fuzzy Sets Concept to Pattern Classification. Ph.D. Dissertation, Purdue University, West Lafayette.
- Mordeson, J. and Malik, D. (2002) Fuzzy Automata and Languages: Theory and Applications. ACRC Press Company, Boca Raton. http://dx.doi.org/10.1201/9781420035643
- Prenowitz, W. (1943) Projective Geometries as Multigroups. The American Journal of Mathematics, 65, 235-256. http://dx.doi.org/10.2307/2371812
- Prenowitz, W. and Jantosciak, W. (1972) Geometries and Join Spaces. Journal für die Reine und Angewandte Mathematik, 257, 100-128.
- Chvalina, J. (1995) Functional Graphs, Quasi Ordered Sets and Commutative Hypergroups. Masaryk University, Brno.
- Novák, M. (2013) Some Basic Properties of EL-Hyperstructures. European Journal of Combinatorics, 34, 446-459. http://dx.doi.org/10.1016/j.ejc.2012.09.005
- Hoskova, S. and Chvalina, J. (2008) Discrete Transformation Hypergroups and Transformation Hypergroups with Phase Tolerance Space. Discrete Mathematics, 308, 4133-4143. http://dx.doi.org/10.1016/j.disc.2007.08.005