M. HADDAD ET AL.
Copyright © 2011 SciRes. ENG
679
for anisotropic static problems, two example problems,
relevant to plane stress (thin plates) were examined by
using the ET approach and the FEM with different grid
arrangement. The results are in good agreement with the
analytical solutions even in the case of a small number of
nodes (coarse mesh). Most importantly, we have also
noted that these results are very near and even in some
cases better than those predicted by the FEM.
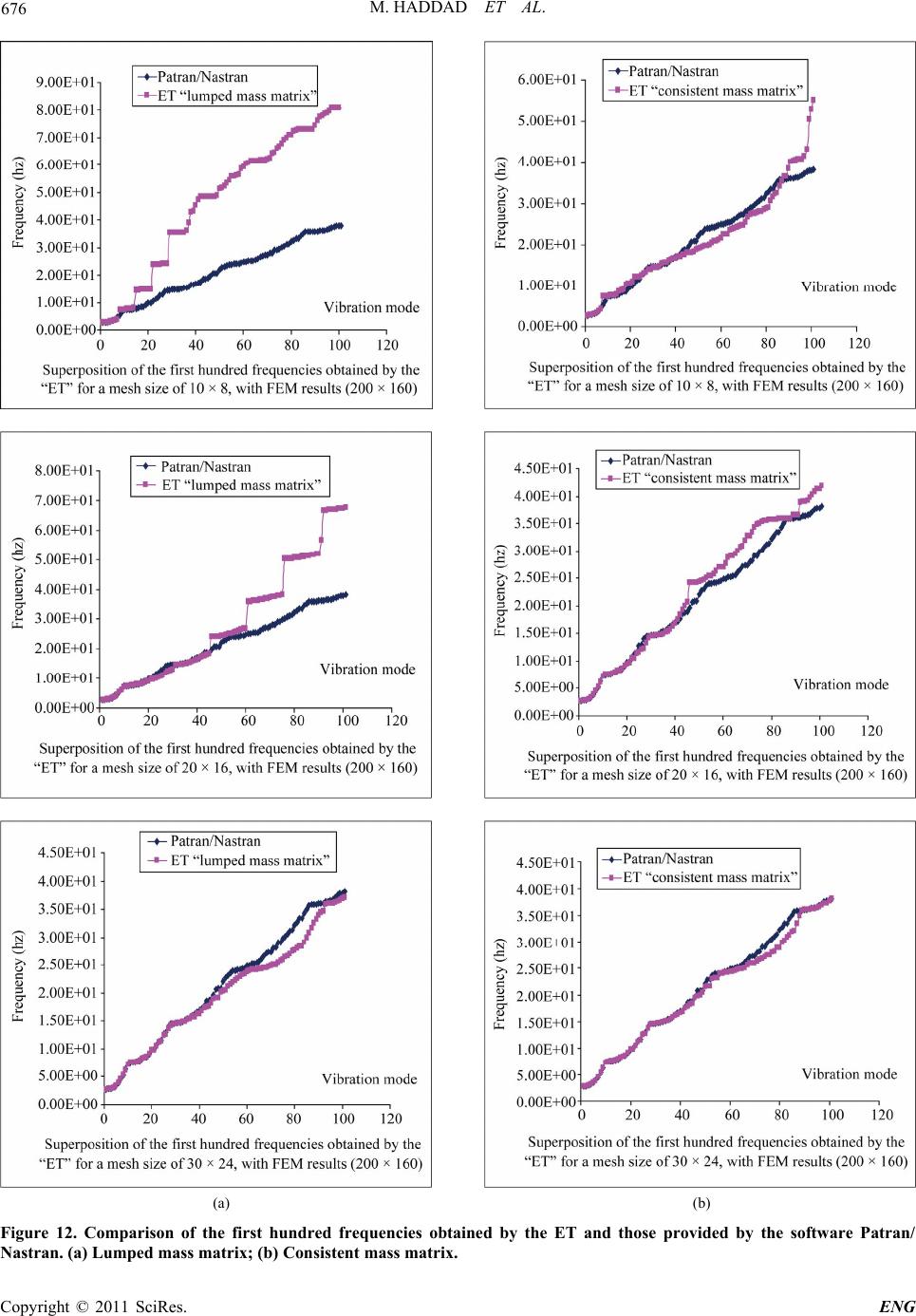
To extend this procedure to dynamics, we have just
formulated in addition a simple mass conservation rule,
and choose a circular form for our beams. In order to
validate this procedure, we compared the results to those
of the FEM with a relatively fine mesh. We have not
made a comparison with analytical solutions because this
latter proposes approximate solutions concerning only
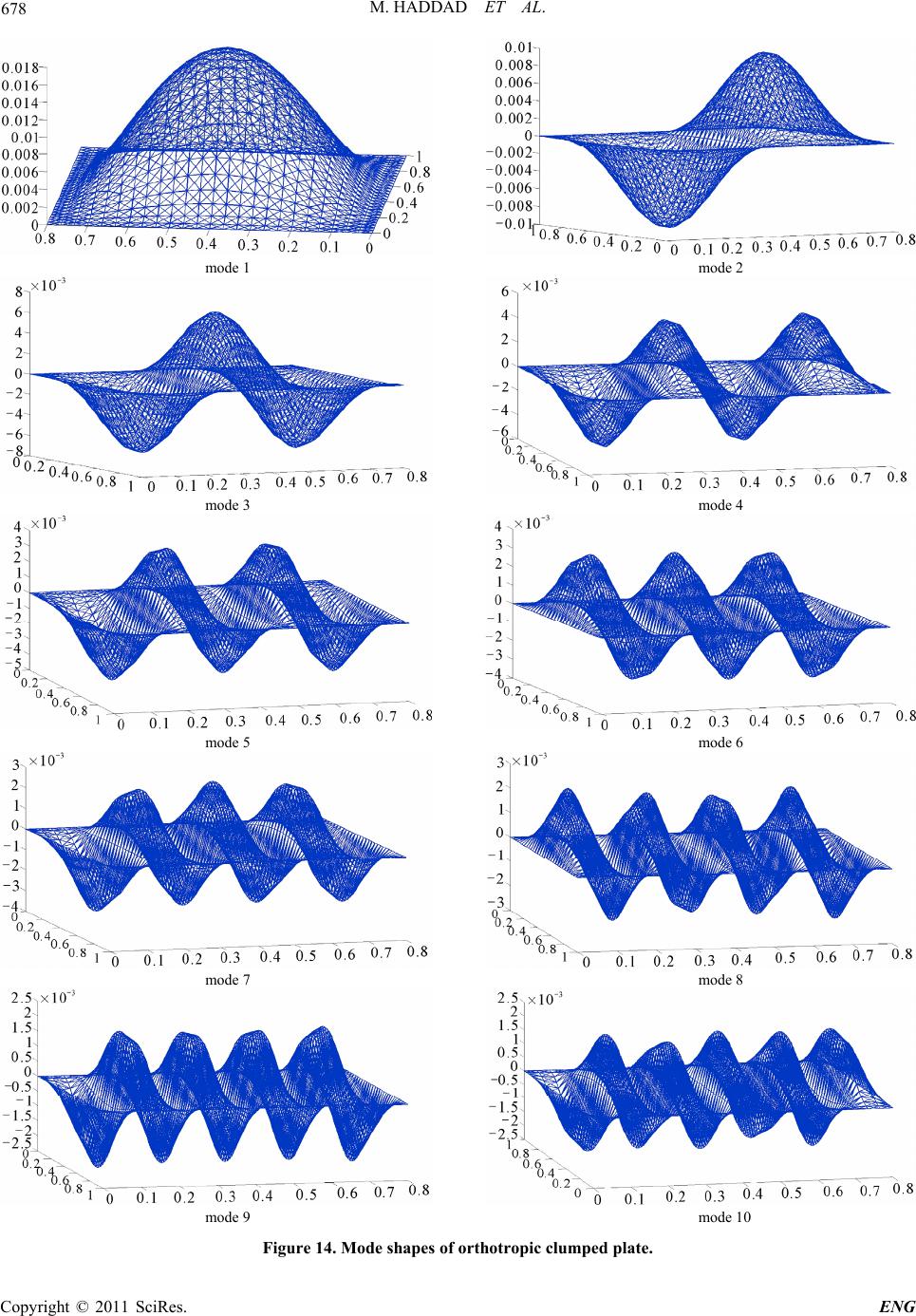
the bending of the plates, while the FEM gives the dif-
ferent vibration modes (bending, torsion, traction…). We
considered the problem of a thin clamped plate, and
found that the results are in good agreement with the
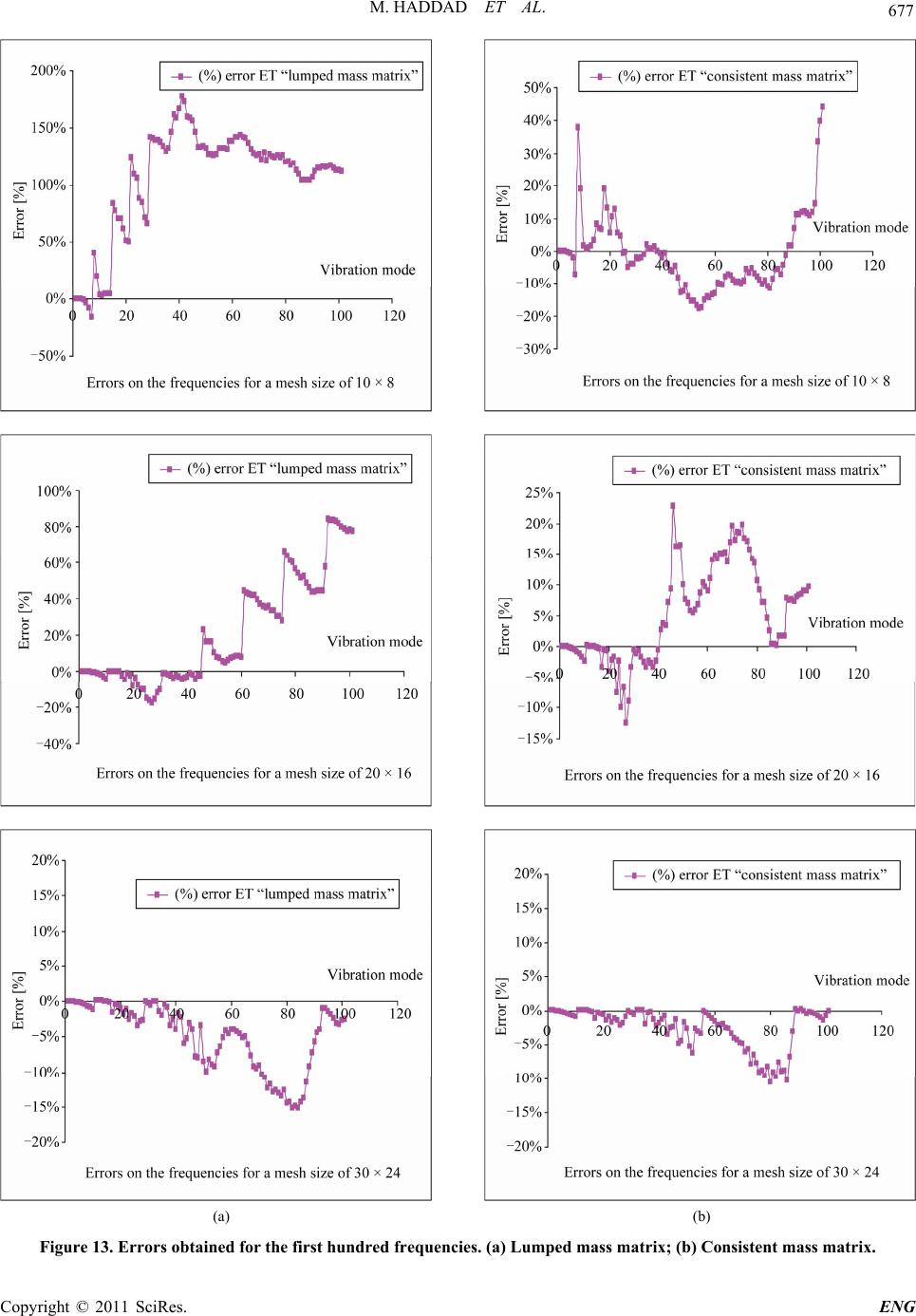
FEM solutions. We note also that the formulation of the
mass as a consistent one gave best results; this results are
explained by the fact that the mass is well distributed in
the ERC and approaches the homogeneous distribution in
the real cell. The lumped representation of the mass is
found to be convenient in the high computational speed,
indeed the mass matrixes are diagonals, and so easier to
invert, moreover we observe that its results remain close
to those of a consistent formulation. Thus the user can be
free to choose between very accurate results and high
computational speed.
A future work could be to deal with 3D problems. We
have created the connectivity table of different 3D
“ERC”, and begin the solving of the problem concerning
the expression of the stiffness matrix in 3D. The analysis
performed for the 2D models can be extended to the 3D
ones and also addresses other problems like fatigue and
blucking.
7. References
[1] E. ABSI, “La Theorie des Equivalences et Son Applica-
tion a l’Etude des Ouvrages d’Art,” Série: Théories et
Méthodes de Calcul, Annales de l’Institut Technique du
Bâtiment et des Travaux Publics, Supplément No. 298,
Octobre 1972.
[2] M. Haddad, “Application de la Methode des Equiva-
lences en Dynamique,” Rapport de Stage Master2 Re-
cherche, l’Institut Supérieur de l’Aéronautique et de
l’Espace (ISAE), Toulouse, 7 February 2010.
[3] S. Vegas, “Application de la Theorie des Equivalences a
l’Etude d’Une Dalle Biaise,” PhD Thesis, University Paul
Sabatier de Toulouse, 11 June 1976.
[4] G. M. Cucchi, “Elastic-Static Analysis of Shear
Wall/Slab-Frame Systems Using the Framework Method,”
Pergamon, 30 June 1993.
[5] S. Timochenko, S. W. Kreiger, “Théorie des Plaques et
Coques,” Librairie Polytechnique CH, Beranger, 1961.
[6] S. Abrate, “Inpact in Composite Structures,” Cambridge
University Press, Cambridge, 1998, pp. 59-61.
doi:10.1017/CBO9780511574504
[7] W. Leissa, “Vibrations of Plates,” Ohio State University
Columbus, Ohio, Edition Scientific and Technical Infor-
mation Division, Office of Technology Utilization, Na-
tional Aeronautics and Space Administration, Washinton,
DC, 1969.