Paper Menu >>
Journal Menu >>
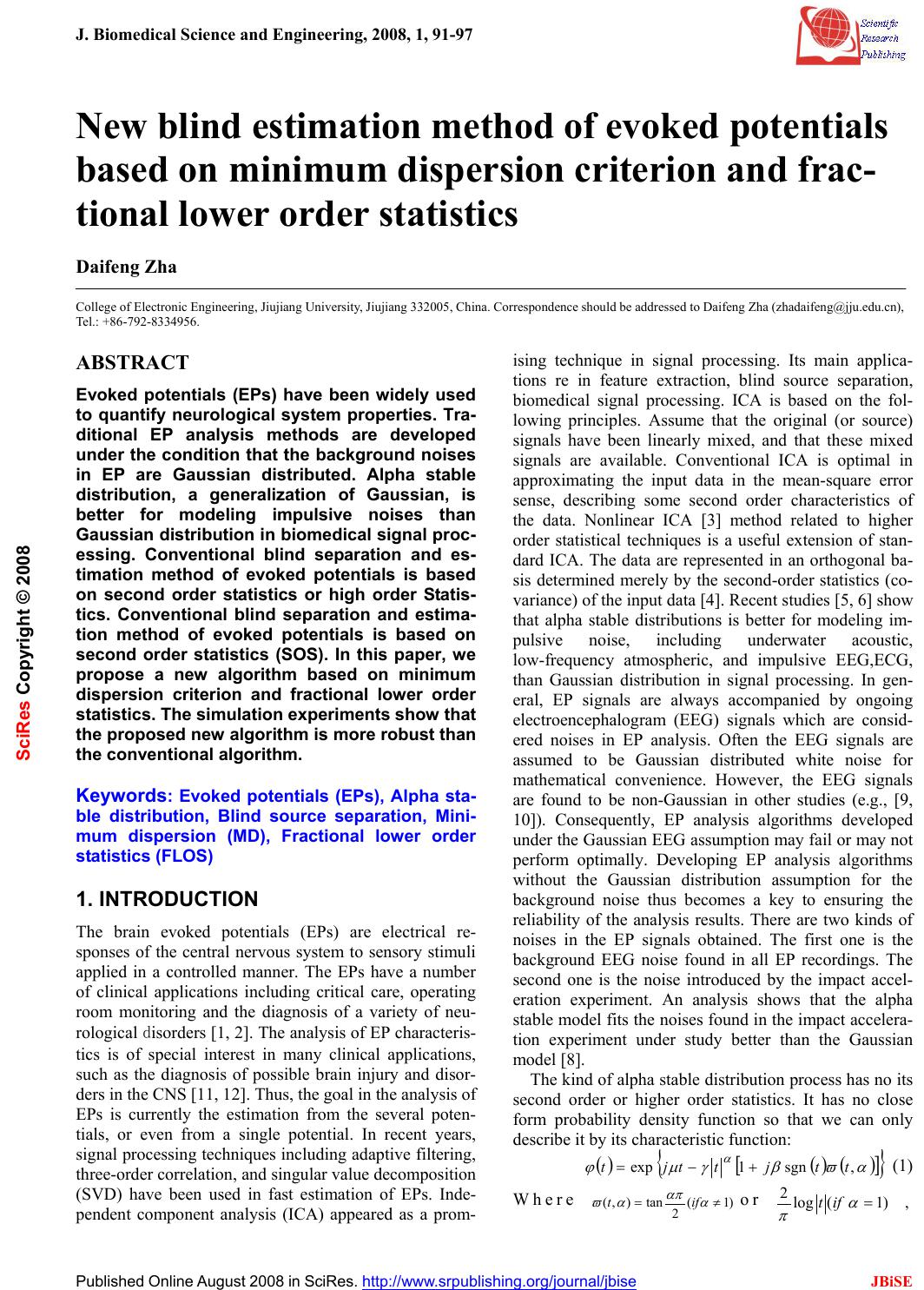 J. Biomedical Science and Engineering, 2008, 1, 91-97 Published Online August 2008 in SciRes. http://www.srpublishing.org/journal/jbise JBiSE New blind estimation method of evoked potentials based on minimum dispersion criterion and frac- tional lower order statistics Daifeng Zha College of Electronic Engineering, Jiujiang University, Jiujiang 332005, China. Correspondence should be addressed to Daifeng Zha (zhadaifeng@jju.edu.cn), Tel.: +86-792-8334956. ABSTRACT Evoked potentials (EPs) have been widely used to quantify neurological system properties. Tra- ditional EP analysis methods are developed under the condition that the background noises in EP are Gaussian distributed. Alpha stable distribution, a generalization of Gaussian, is better for modeling impulsive noises than Gaussian distribution in biomedical signal proc- essing. Conventional blind separation and es- timation method of evoked potentials is based on second order statistics or high order Statis- tics. Conventional blind separation and estima- tion method of evoked potentials is based on second order statistics (SOS). In this paper, we propose a new algorithm based on minimum dispersion criterion and fractional lower order statistics. The simulation experiments show that the proposed new algorithm is more robust than the conventional algorithm. Keywords: Evoked potentials (EPs), Alpha sta- ble distribution, Blind source separation, Mini- mum dispersion (MD), Fractional lower order statistics (FLOS) 1. INTRODUCTION The brain evoked potentials (EPs) are electrical re- sponses of the central nervous system to sensory stimuli applied in a controlled manner. The EPs have a number of clinical applications including critical care, operating room monitoring and the diagnosis of a variety of neu- rological disorders [1, 2]. The analysis of EP characteris- tics is of special interest in many clinical applications, such as the diagnosis of possible brain injury and disor- ders in the CNS [11, 12]. Thus, the goal in the analysis of EPs is currently the estimation from the several poten- tials, or even from a single potential. In recent years, signal processing techniques including adaptive filtering, three-order correlation, and singular value decomposition (SVD) have been used in fast estimation of EPs. Inde- pendent component analysis (ICA) appeared as a prom- ising technique in signal processing. Its main applica- tions re in feature extraction, blind source separation, biomedical signal processing. ICA is based on the fol- lowing principles. Assume that the original (or source) signals have been linearly mixed, and that these mixed signals are available. Conventional ICA is optimal in approximating the input data in the mean-square error sense, describing some second order characteristics of the data. Nonlinear ICA [3] method related to higher order statistical techniques is a useful extension of stan- dard ICA. The data are represented in an orthogonal ba- sis determined merely by the second-order statistics (co- variance) of the input data [4]. Recent studies [5, 6] show that alpha stable distributions is better for modeling im- pulsive noise, including underwater acoustic, low-frequency atmospheric, and impulsive EEG,ECG, than Gaussian distribution in signal processing. In gen- eral, EP signals are always accompanied by ongoing electroencephalogram (EEG) signals which are consid- ered noises in EP analysis. Often the EEG signals are assumed to be Gaussian distributed white noise for mathematical convenience. However, the EEG signals are found to be non-Gaussian in other studies (e.g., [9, 10]). Consequently, EP analysis algorithms developed under the Gaussian EEG assumption may fail or may not perform optimally. Developing EP analysis algorithms without the Gaussian distribution assumption for the background noise thus becomes a key to ensuring the reliability of the analysis results. There are two kinds of noises in the EP signals obtained. The first one is the background EEG noise found in all EP recordings. The second one is the noise introduced by the impact accel- eration experiment. An analysis shows that the alpha stable model fits the noises found in the impact accelera- tion experiment under study better than the Gaussian model [8]. The kind of alpha stable distribution process has no its second order or higher order statistics. It has no close form probability density function so that we can only describe it by its characteristic function: () () () [] { } αϖβγμϕ α ,sgn1exp ttjttjt +−= (1) Where )1( 2 tan),( ≠= α απ αϖ ift or ,)1(log 2= α π ift SciRes Copyright © 2008 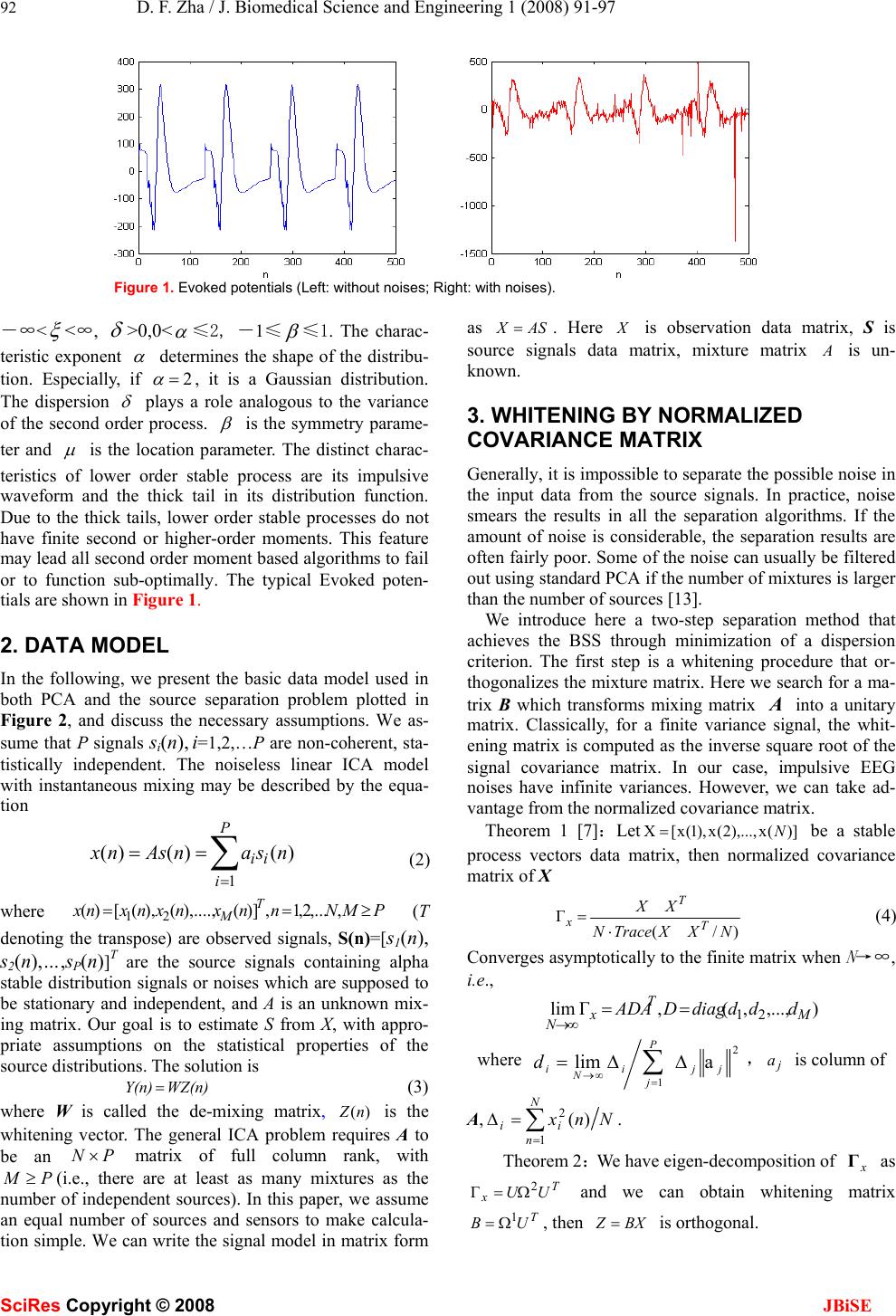 92 D. F. Zha / J. Biomedical Science and Engineering 1 (2008) 91-97 SciRes Copyright © 2008 JBiSE Figure 1. Evoked potentials (Left: without noises; Right: with noises). -∞< ξ <∞, δ >0,0< α ≤2, -1≤ β ≤1. The charac- teristic exponent α determines the shape of the distribu- tion. Especially, if 2= α , it is a Gaussian distribution. The dispersion δ plays a role analogous to the variance of the second order process. β is the symmetry parame- ter and μ is the location parameter. The distinct charac- teristics of lower order stable process are its impulsive waveform and the thick tail in its distribution function. Due to the thick tails, lower order stable processes do not have finite second or higher-order moments. This feature may lead all second order moment based algorithms to fail or to function sub-optimally. The typical Evoked poten- tials are shown in Figure 1. 2. DATA MODEL In the following, we present the basic data model used in both PCA and the source separation problem plotted in Figure 2, and discuss the necessary assumptions. We as- sume that P signals si(n), i=1,2,…P are non-coherent, sta- tistically independent. The noiseless linear ICA model with instantaneous mixing may be described by the equa- tion ∑ = == P i ii nsanAsnx 1 )()()( (2) where PMNnnxnxnxnx T M≥== ,,...2,1,)](),....,(),([)( 21 (T denoting the transpose) are observed signals, S(n)=[s1(n), s2(n),…,sP(n)]T are the source signals containing alpha stable distribution signals or noises which are supposed to be stationary and independent, and A is an unknown mix- ing matrix. Our goal is to estimate S from X, with appro- priate assumptions on the statistical properties of the source distributions. The solution is WZ(n)Y(n)= (3) where W is called the de-mixing matrix, )(nZ is the whitening vector. The general ICA problem requires A to be an PN × matrix of full column rank, with P M ≥(i.e., there are at least as many mixtures as the number of independent sources). In this paper, we assume an equal number of sources and sensors to make calcula- tion simple. We can write the signal model in matrix form as ASX = . Here X is observation data matrix, S is source signals data matrix, mixture matrix A is un- known. 3. WHITENING BY NORMALIZED COVARIANCE MATRIX Generally, it is impossible to separate the possible noise in the input data from the source signals. In practice, noise smears the results in all the separation algorithms. If the amount of noise is considerable, the separation results are often fairly poor. Some of the noise can usually be filtered out using standard PCA if the number of mixtures is larger than the number of sources [13]. We introduce here a two-step separation method that achieves the BSS through minimization of a dispersion criterion. The first step is a whitening procedure that or- thogonalizes the mixture matrix. Here we search for a ma- trix B which transforms mixing matrix A into a unitary matrix. Classically, for a finite variance signal, the whit- ening matrix is computed as the inverse square root of the signal covariance matrix. In our case, impulsive EEG noises have infinite variances. However, we can take ad- vantage from the normalized covariance matrix. Theorem 1 [7]:Let )](x),...,2(x),1(x[X N= be a stable process vectors data matrix, then normalized covariance matrix of X )/( Γ NXXTraceN XX T T x⋅ = (4) Converges asymptotically to the finite matrix when N →∞, i.e., ),...,,(,Γlim 21 M T x N ddddiagDADA == ∞→ where 2 1 alim jj P j i N i dΔΔ=∑ = ∞→ ,j a is column of A,∑ = =Δ N n ii Nnx 1 2)(. Theorem 2:We have eigen-decomposition of x Γ as T xUU2 ΓΩ= and we can obtain whitening matrix T UB1 Ω= , then B X Z = is orthogonal.  D. F. Zha / J. Biomedical Science and Engineering 1 (2008) 91-97 93 SciRes Copyright © 2008 JBiSE Figure 2. Data and system model. Proof: TT x TTT/N)BTrace(XXNBΓBBXXZZ ⋅== I/N)Trace(XXN )(ΩIΩIΩ/N)Trace(XXN )(ΩUUUΩUΩ/N)Trace(XXN BUUΩB/N)Trace(XXN T T-12-1T T-1T2T-1T TT2T ⋅⋅= ⋅⋅⋅⋅⋅⋅⋅= ⋅⋅⋅⋅⋅= ⋅⋅⋅⋅= So we can write I))(BAD(BADBBADABBΓT1/21/2TTT x=== and thus the whitening of x(n) isBx(n)z(n) =. 4. DEMIXING ALGORITHM The core part and most difficult task in BSS is learning of the separating matrix W. During the last years, many neu- ral blind separation algorithms have been proposed. In the following, we discuss and propose separation algorithms which are suitable for alpha stable noise environments in PCA-type networks. Let us consider ith output weight vector PiWi...2,1, = , standard PCA is based on second order statistics and maximize the output variances E{|yi(n)|2}=E{|Wi TZ(n)|2} subject to orthogonal constraintsPii IWW= T. As lower order alpha stable distribution noise has no second order moment, we must select appropriate optimal criterion. FLOS and related other statistics are clearly defined in [5, 6]. So we must use fractional lower order statistics (FLOS) [5, 6], that is to say, the PCA problem corresponding to p-order moment maximization is solution to optimization problem. For each PiWi...2,1, = ) (}|W)(Z| 1 {maxarg T WP T ii p i opt iIWWn p EW i == (5) Let objective function be ∑≠= +−+= P ijj jiijiiii p ii n p EJ ,1 TT TWW 2 1 )1WW( 2 1 }|W)(Z| 1 {)W( λλ Here the Lagrange multiplier isij λ , imposed on the or- thogonal constraints. For each neuron, i W is orthogonal to the weight vectorij j≠,W. The estimated gradient of )(i JW with respect to i W is ∑ = −+=∇ P j jiji p ii WWnconjWnnZEWJ 1 T2T )})(Z(|)(Z|)({)( ˆ λ (6) At the optimum, the gradients must vanish for Pi ,...2,1=, and ijj T i WW δ =.These can be taken into ac- count by multiplying (6) by T j Wfrom left. We can ob- tain )}W)(Z(|W)(Z|)(Z{W T2T T i p ijijnconjnnE − −= λ . In- serting these into (6), we can get )}W)(Z(|W)(Z|)(Z{]WWI[)W( ˆT2T 1 T i p i P j jji nconjnnEJ − = ∑ −=∇ (7) A practical gradient algorithm for optimization problem (5) is now obtained by inserting (7) into ))(( ˆ )()()1(nJnnn iii WWW ∇−=+ μ , where )(n μ is the gain parameter. The final algorithm is thus |)(Z])(W)(WI)[()(W)1(W 1 Tnnnnnn P j jjii∑ = −−=+ μ ))(W)(Z(|)(W)(Z T2T nnconjnn i p i − (8) As )()()( Tnnnyii WZ=, (8) can be written as follow ))((|)(|)()(W)1(W 2nyconjnynnn i p iii − −=+ μ ])(W)()(Z[ 1 ∑ = − P j jjnnyn (9) Let )(||)(2tconjttg p− =, then )(tg is appropriate PCA network nonlinear transform function for lower order al- pha stable distribution impulse noises. Considering that during the iteration error item of gra- dient ∑ = − P j T jj nn 1 )()(WWI might be zero instantaneously, we modify (9) in order to improve robustness of algorithm as ])())(()())[(()()()1( 1 ∑ = −−=+ P j jiiiinnygnnygnnn WZWW μ (10) Thus P W,...,W,W 21 can be obtained. Let Y(n)=[y1(n), y2(n), ..., yP(n)]T, W=[W1, W2, …, WP]. For whole network, solution to W and optimization problem is }|W(n)Z| 1 {maxargW T 1 W opt p i P ip E ∑ = = (11) According above derivation, by using )(||)(2tconjttg p− =, the algorithm for learning W is thus ))(Y())](Y()(W)(Z)[()(W)1(W Tngngnnnnn −−=+ μ (12) 5. Performances Analysis Different nonlinear function can be applied to different blind signal separation problem. Many popular functions are g(t)=sign(t) and g(t)=tanh(t) corresponding to thedou- ble exponential distribution |)|exp( 2 1x−and the in- verse-cosine-hyperbolic distribution)cosh( 11 x π , re- specttively. For the class of symmetric normal inverse 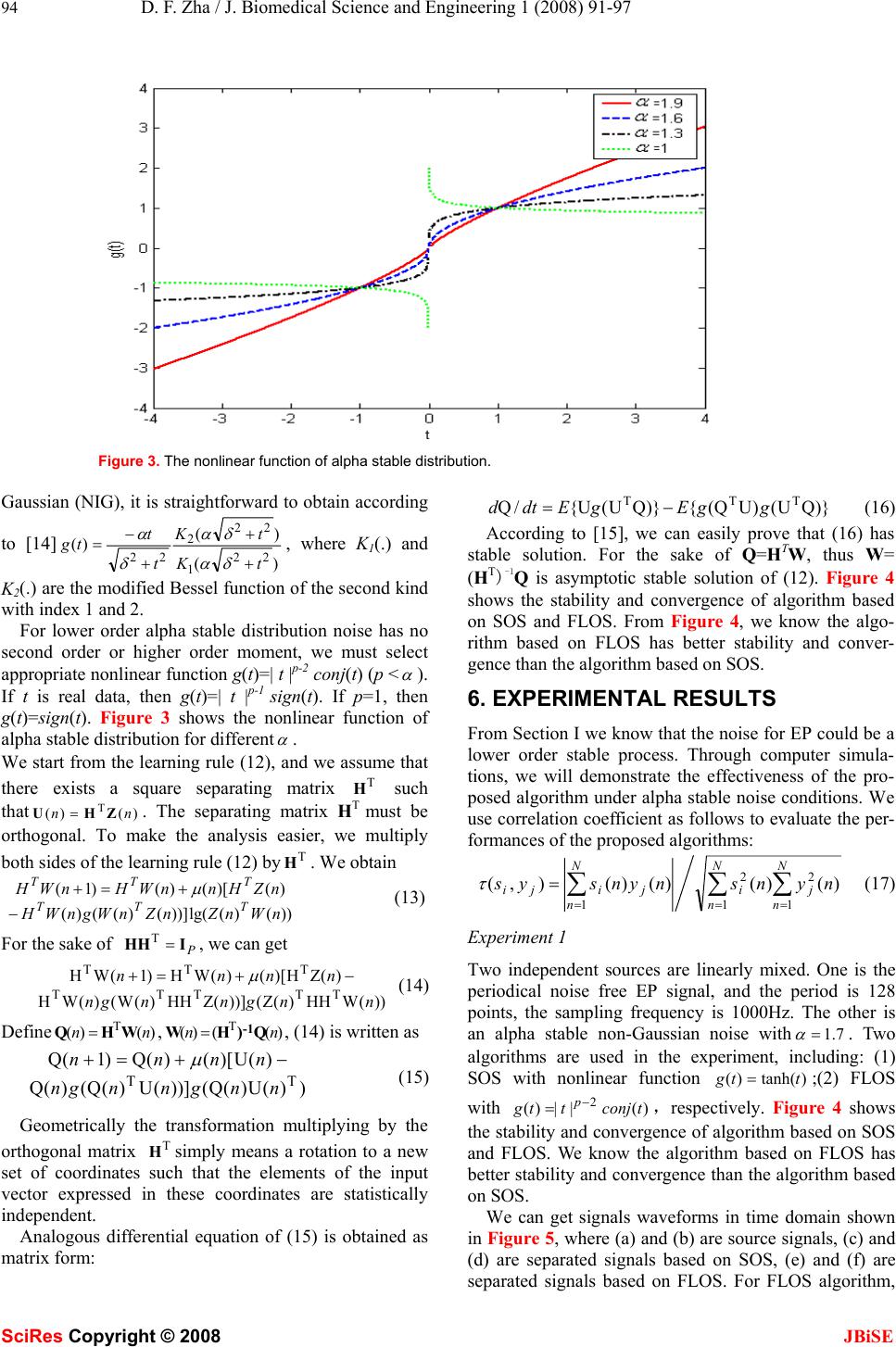 94 D. F. Zha / J. Biomedical Science and Engineering 1 (2008) 91-97 SciRes Copyright © 2008 JBiSE Figure 3. The nonlinear function of alpha stable distribution. Gaussian (NIG), it is straightforward to obtain according to [14] )( )( )( 22 1 22 2 22 tK tK t t tg + + + − = δα δα δ α , where K1(.) and K2(.) are the modified Bessel function of the second kind with index 1 and 2. For lower order alpha stable distribution noise has no second order or higher order moment, we must select appropriate nonlinear function g(t)=| t |p-2 conj(t) (p < α ). If t is real data, then g(t)=| t | p-1 sign(t). If p=1, then g(t)=sign(t). Figure 3 shows the nonlinear function of alpha stable distribution for different α . We start from the learning rule (12), and we assume that there exists a square separating matrix T H such that )()( TnnZHU =. The separating matrix H T must be orthogonal. To make the analysis easier, we multiply both sides of the learning rule (12) byT H. We obtain ))()(lg())]()(()( )()[()()1( nWnZnZnWgnWH nZHnnWHnWH TTT TTT − +=+ μ (13) For the sake of P IHH = T, we can get ))(WHH)(Z())](ZHH)(W()(WH )(ZH)[()(WH)1(WH TTTTT TTT nngnngn nnnn −+=+ μ (14) Define )()(Tnn WHQ =,)(()( Tnn Q)HW-1 =, (14) is written as ))(U)(Q())](U)(Q()(Q )(U)[()(Q)1(Q TT nngnngn nnnn−+=+ μ (15) Geometrically the transformation multiplying by the orthogonal matrix T Hsimply means a rotation to a new set of coordinates such that the elements of the input vector expressed in these coordinates are statistically independent. Analogous differential equation of (15) is obtained as matrix form: )}QU()UQ({)}QU(U{/Q TTT ggEgEdtd−= (16) According to [15], we can easily prove that (16) has stable solution. For the sake of Q=HTW, thus W= (HT)-1Q is asymptotic stable solution of (12). Figure 4 shows the stability and convergence of algorithm based on SOS and FLOS. From Figure 4, we know the algo- rithm based on FLOS has better stability and conver- gence than the algorithm based on SOS. 6. EXPERIMENTAL RESULTS From Section I we know that the noise for EP could be a lower order stable process. Through computer simula- tions, we will demonstrate the effectiveness of the pro- posed algorithm under alpha stable noise conditions. We use correlation coefficient as follows to evaluate the per- formances of the proposed algorithms: ∑∑∑ === = N n j N n i N n jiji nynsnynsys 1 2 1 2 1 )()()()(),( τ (17) Experiment 1 Two independent sources are linearly mixed. One is the periodical noise free EP signal, and the period is 128 points, the sampling frequency is 1000Hz. The other is an alpha stable non-Gaussian noise with7.1 = α . Two algorithms are used in the experiment, including: (1) SOS with nonlinear function )tanh()( ttg =;(2) FLOS with )(||)(2tconjttg p− =,respectively. Figure 4 shows the stability and convergence of algorithm based on SOS and FLOS. We know the algorithm based on FLOS has better stability and convergence than the algorithm based on SOS. We can get signals waveforms in time domain shown in Figure 5, where (a) and (b) are source signals, (c) and (d) are separated signals based on SOS, (e) and (f) are separated signals based on FLOS. For FLOS algorithm,  D. F. Zha / J. Biomedical Science and Engineering 1 (2008) 91-97 95 SciRes Copyright © 2008 JBiSE Figure 4. The stability and convergence. Figure 5. Separating results: (a)-(b) are the source signals. (c)-(d) are the separated signals with SOS. (e)-(f) are the separated signals with FLOS. Figure 6. Separating results: (a)-(b) are the source signals. (c)-(d) are the separated signals with SOS. (e)-(f) are the separated signals with FLOS. 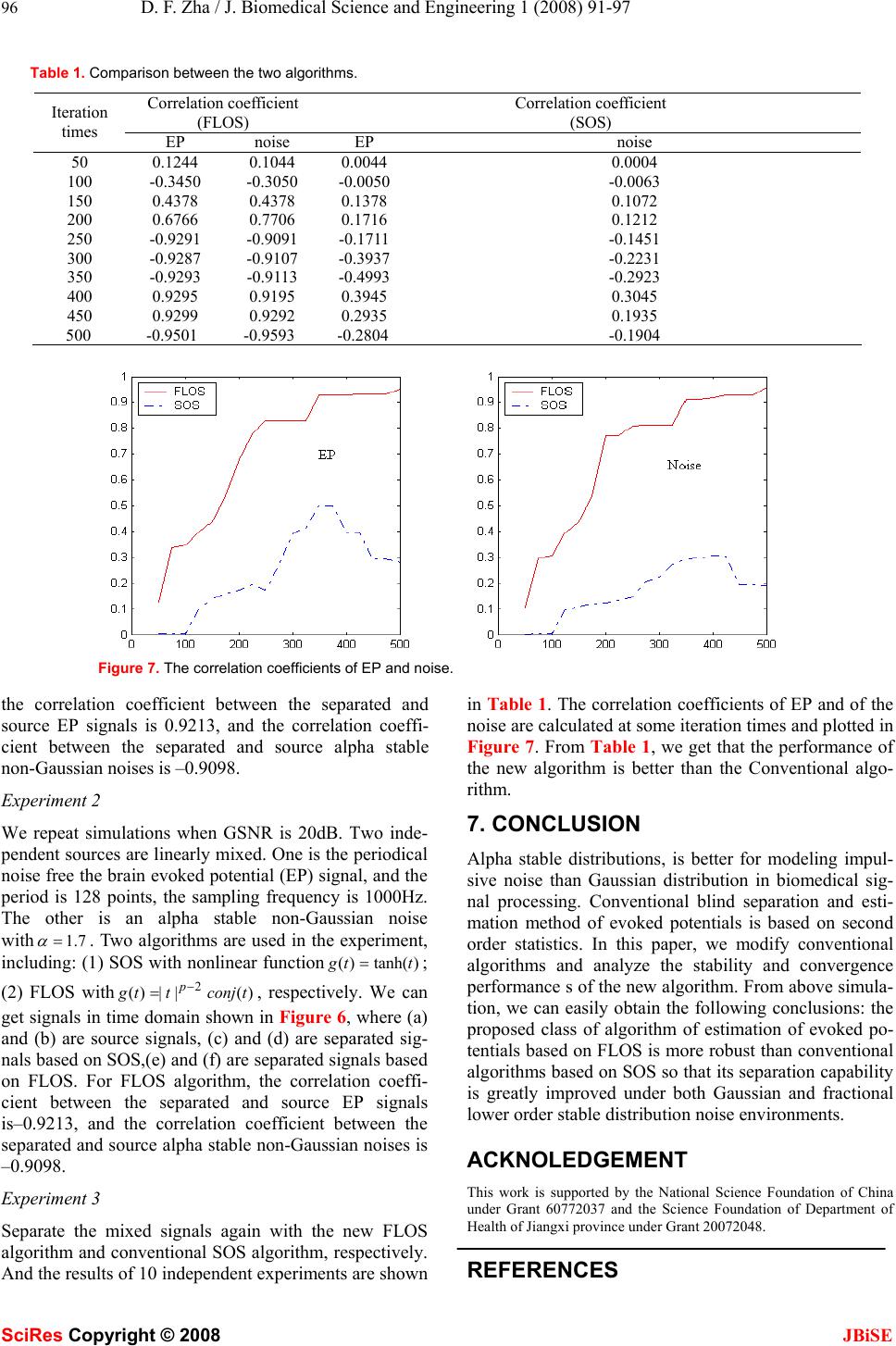 96 D. F. Zha / J. Biomedical Science and Engineering 1 (2008) 91-97 SciRes Copyright © 2008 JBiSE Table 1. Comparison between the two algorithms. Correlation coefficient (FLOS) Correlation coefficient (SOS) Iteration times EP noise EP noise 50 0.1244 0.1044 0.0044 0.0004 100 -0.3450 -0.3050 -0.0050 -0.0063 150 0.4378 0.4378 0.1378 0.1072 200 0.6766 0.7706 0.1716 0.1212 250 -0.9291 -0.9091 -0.1711 -0.1451 300 -0.9287 -0.9107 -0.3937 -0.2231 350 -0.9293 -0.9113 -0.4993 -0.2923 400 0.9295 0.9195 0.3945 0.3045 450 0.9299 0.9292 0.2935 0.1935 500 -0.9501 -0.9593 -0.2804 -0.1904 Figure 7. The correlation coefficients of EP and noise. the correlation coefficient between the separated and source EP signals is 0.9213, and the correlation coeffi- cient between the separated and source alpha stable non-Gaussian noises is –0.9098. Experiment 2 We repeat simulations when GSNR is 20dB. Two inde- pendent sources are linearly mixed. One is the periodical noise free the brain evoked potential (EP) signal, and the period is 128 points, the sampling frequency is 1000Hz. The other is an alpha stable non-Gaussian noise with 7.1= α . Two algorithms are used in the experiment, including: (1) SOS with nonlinear function)tanh()( ttg = ; (2) FLOS with)(||)( 2tconjttg p− =, respectively. We can get signals in time domain shown in Figure 6, where (a) and (b) are source signals, (c) and (d) are separated sig- nals based on SOS,(e) and (f) are separated signals based on FLOS. For FLOS algorithm, the correlation coeffi- cient between the separated and source EP signals is–0.9213, and the correlation coefficient between the separated and source alpha stable non-Gaussian noises is –0.9098. Experiment 3 Separate the mixed signals again with the new FLOS algorithm and conventional SOS algorithm, respectively. And the results of 10 independent experiments are shown in Table 1. The correlation coefficients of EP and of the noise are calculated at some iteration times and plotted in Figure 7. From Table 1, we get that the performance of the new algorithm is better than the Conventional algo- rithm. 7. CONCLUSION Alpha stable distributions, is better for modeling impul- sive noise than Gaussian distribution in biomedical sig- nal processing. Conventional blind separation and esti- mation method of evoked potentials is based on second order statistics. In this paper, we modify conventional algorithms and analyze the stability and convergence performance s of the new algorithm. From above simula- tion, we can easily obtain the following conclusions: the proposed class of algorithm of estimation of evoked po- tentials based on FLOS is more robust than conventional algorithms based on SOS so that its separation capability is greatly improved under both Gaussian and fractional lower order stable distribution noise environments. ACKNOLEDGEMENT This work is supported by the National Science Foundation of China under Grant 60772037 and the Science Foundation of Department of Health of Jiangxi province under Grant 20072048. REFERENCES  D. F. Zha / J. Biomedical Science and Engineering 1 (2008) 91-97 97 SciRes Copyright © 2008 JBiSE [1] R. R. Gharieb, A. Cichocki. (2001) Noise reduction in brain evoked potentials based on third-order correlations. IEEE Transactions on Biomedical Engineering, 48(5): 501-512. [2] C. E. Davila, R. Srebro, and I. A. Ghaleb. (1998) Optimal detection of visual evoked potential. IEEE Transaction on Biomedical Engi- neering, 45(6): 800–803. [3] Yanwu Zhang,Yuanliang Ma (1997) CGHA for principal component extraction in the complex domain. IEEE. Trans. on Neural Net- work,vol 8,No.5. [4] Mutihac, R. Van Hulle, M.M. (2003) PCA and ICA neural imple- mentations for source separation - a comparative study. Proceedings of the International Joint Conference on Neural Networks, Volume: 1 , 20-24. [5] C. L. Nikias and M. shao. (1995) Signal Processing with Al- pha-Stable Distributions and Applications. New York: John Wiley & Sons Inc. [6] M. shao and C. L. Nikias. (1993) Signal Processing with fractional lower order moments: stable processes and their applications. Pro - ceedings of IEEE, Vol.81, No.7, 986-1010. [7] G. Samorodnitsky, M. S. Taqqu. (1994) Stable Non-Gaussian Ran- dom Process: Stochastic Models with Infinite Variance. New York: Chapman and Hall. [8]Xuan Kong,Tianshuang Qiu. (1999) Adaptive Estimation of Latency Change in Evoked Potentials by Direct Least Mean p-Norm Time-Delay Estimation. IEEE Transactions on Biomedical Engi- neering, vol. 46, No. 8, August. [9] N. Hazarika, A. C. Tsoi, and A. A. Sergejew. (1997) Nonlinear considerations in EEG signal classification. IEEE Trans. Signal Processing, vol. 45, pp. 829–936. [10] X. Ma and C. L. Nikias. (1996) Joint estimation of time delay and frequency delay in impulsive noise using fractional lower-order sta- tistics. IEEE Trans. Signal Processing, vol. 44, pp. 2669–2687, Nov. [11] X. Kong and N. V. Thakor. (1996) Adaptive estimation of latency changes in evoked potentials. IEEE Trans. Biomed. Eng., vol. 43, pp. 189–197, Feb. [12] C. A. Vaz and N. V. Thakor. (1989) Adaptive Fourier estimation of time varying evoked potentials. IEEE Trans. Biomed. Eng., vol. 36, pp. 448–455, Apr. [13] Winter, S.; Sawada, H.; Makino, S. (2003) Geometrical under- standing of the PCA subspace method for overdetermined blind source separation.Acoustics, Speech, and Signal Processing. [14] Preben Kidmose. (2001) Blind separation of heavy tail signals. Technical university of denmark ,IMM-Phd, LYNGBY [15] Juha Karhumen;Erkki Oja;Liuyue Wang;Ricardo Vigario;Jyrki Joutsensalo. (1997) A class of neural networks for independent component analysis. IEEE. Trans. on Neural Network,vol 8,No.3. |