 Applied Mathematics, 2011, 2, 890-898 doi:10.4236/am.2011.27119 Published Online July 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM A Hybrid Optimization Technique Coupling an Evolutionary and a Local Search Algorithm for Economic Emission Load Dispatch Problem A. A. Mousa, Kotb A. Kotb Department of Mathematics and Statistics, Faculty of sciences, Taif University, Taif, El-Haweiah, Kingdom of Saudi Arabia (KSA) E-mail: a_mousa15@yahoo .com Received May 13, 2011; revised May 24, 2011; accepted May 27, 2011 Abstract This paper presents an optimization technique coupling two optimization techniques for solving Economic Emission Load Dispatch Optimization Problem EELD. The proposed approach integrates the merits of both genetic algorithm (GA) and local search (LS), where it maintains a finite-sized archive of non-dominated solutions which gets iteratively updated in the presence of new solutions based on the concept of ε-dominance. To improve the solution quality, local search technique was applied as neighborhood search engine, where it intends to explore the less-crowded area in the current archive to possibly obtain more non- dominated solutions. TOPSIS technique can incorporate relative weights of criterion importance, which has been implemented to identify best compromise solution, which will satisfy the different goals to some extent. Several optimization runs of the proposed approach are carried out on the standard IEEE 30-bus 6-genrator test system. The comparison demonstrates the superiority of the proposed approach and confirms its potential to solve the multiobjective EELD problem. Keywords: Economic Emission Load Dispatch, Evolutionary Algorithms, Multiobjective Optimization, Local Search 1. Introduction The purpose of EELD problem is to figure out the opti- mal amount of the generated power for the fossil-based generating units in the system by minimizing the fuel cost and emission level simultaneously, subject to vari- ous equality and inequality constraints including the se- curity measures of the power transmission/distribution. Different techniques have been reported in the litera- ture pertaining to economic emission load dispatch pro- blem. In [1,2] the problem has been reduced to a single objective problem by treating the emission as a con- straint with a permissible limit. This formulation, how- ever, has a severe difficulty in getting the trade-off rela- tions between cost and emission. Alternatively, minimiz- ing the emission has been handled as another objective in addition to usual cost objective. A linear programming based optimization procedures in which the objectives are considered one at a time was presented in [3]. Un- fortunately, the EELD problem is a highly nonlinear and a multimodal optimization problem. Therefore, conven- tional optimization methods that make use of derivatives and gradients, in general, not able to locate or identify the global optimum. On the other hand, many mathe- matical assumptions such as analytic and differential ob- jective functions have to be given to simplify the prob- lem. Furthermore, this approach does not give any in- formation regarding the trade-offs involved. In other research direction, the multiobjective EELD problem was converted to a single objective problem by linear combination of different objectives as a weighted sum [4-7]. The important aspect of this weighted sum method is that a set of Pareto-optimal solutions can be obtained by varying the weights. Unfortunately, this re- quires multiple runs as many times as the number of de- sired Pareto-optimal solutions. Furthermore, this method cannot be used to find Pareto-optimal solutions in prob- lems having a nonconvex Pareto-optimal front. In addi- tion, there is no rational basis of determining adequate weights and the objective function so formed may lose  A. A. MOUSA ET AL.891 significance due to combining noncommensurable objec- tives. To avoid this difficulty, the -constraint method for multiobjective optimization was presented in [8,9]. This method is based on optimization of the most pre- ferred objective and considering the other objectives as constraints bounded by some allowable levels. These levels are then altered to generate the entire Pareto-optimal set. The most obvious weaknesses of this approach are that it is time-consuming and tends to find weakly non- dominated solutions. Goal programming method was also proposed for mul- tiobjective EELD problem [10]. In this method, a target or a goal to be achieved for each objective is assigned and the objective function will then try to minimize the distance from the targets to the objectives. Although the method is computationally efficient, it will yield an infe- rior solution rather than a noninferior one if the goal point is chosen in the feasible domain. Hence, the main drawback of this method is that it requires a priori know- ledge about the shape of the problem search space. Heuristic algorithms such as genetic algorithm have been recently proposed for solving OPF problem [11-13]. The results reported were promising and encouraging for further research. Moreover the studies on heuristic algo- rithms over the past few years, have shown that these methods can be efficiently used to eliminate most of dif- ficulties of classical methods [14-18]. Since they are population-based techniques, multiple Pareto-optimal solutions can, in principle, be found in one single run. In this paper a hybrid multiobjective approach is pro- posed, which based on concept of co-evolution and re- pair algorithm for handing constraints. ε-Dominance con- cept was implemented to maintains a finite-sized archive of non-dominated solutions which gets iteratively up- dated according to the chosen ε-vector. TOPSIS [19] approach has been implemented to select best compro- mise solution, which will satisfy the different goals to some extent. Also, LS method was introduced as neigh- borhood search engine where it intends to explore the less-crowded area in the current archive to possibly ob- tain more nondominated solutions. 2. Multiobjective Optimization Multiobjective optimization [11] differs from the single objective case in several ways: The usual meaning of the optimum makes no sense in the multiple objective case because the solution opti- mizing all objectives simultaneously is, in general, impractical; instead, a search is launched for a feasi- ble solution yielding the best compromise among ob- jectives on a set of, so called, efficient solutions; The identification of a best compromise solution re- quires taking into account the preferences expressed by the decision-maker; The multiple objectives encountered in real-life pro- blems are often mathematical functions of contrasting forms. A key element of a goal programming model is the achievement function; that is, the function that meas- ures the degree of minimization of the unwanted de- viation variables of the goals considered in the model. A general multiobjective optimization problem is ex- pressed by: T 12 T 12 min ,,, s.t. ,,, m n xfxfxfx xS xxx x where 12 ,,, m xfxfxare the m objectives func- tions, 12 ,,, n xx n SR are the n optimization parameters, and is the solution or parameter space. Definition 1. (Pareto optimal solution ): * is said to be a Pareto optimal solution of MOP if there exists no other feasible (i.e., S ) such that, * jj xfx for all 1, ,jm2, and j * j xfx for at least one objective function . Definition 2 [20]. (ε-dominance) Let :m xR and ,ab X . Then is said to ε-dominate for some ε > 0, denoted as , if and only if for ab ab im1, , 1ii afb According to Definition 2, the ε value stands for a relative “tolerance” allowed for the objective values which declared in Figure 1. This is especially important in higher dimensional objective spaces, where the con- cept of ε-dominance can reduce the required number of solutions considerably. Also, the use of -dominance also makes the algorithms practical by allowing a deci- sion maker to control the resolution of the Pareto set ap- proximation by choosing an appropriate value. 3. Economic Emission Load Dispatch (EELD) The economic emission load dispatch involves the si- multaneous optimization of fuel cost and emission object- Figure 1. Graphs visualizing the concepts of dominance (left) and ε-dominance (right). Copyright © 2011 SciRes. AM  A. A. MOUSA ET AL. 892 tives which are conflicting ones. The deterministic prob- lem is formulated as described below. 3.1. Objective Functions Fuel Cost Objective. The classical economic dispatch problem of finding the optimal combination of power generation, which minimizes the total fuel cost while satisfying the total required demand can be mathemati- cally stated as follows [9]: 2 11 ()$ hr nn tiGi iiGiiGi ii fC CPabPcP where : total fuel cost ($/hr), : is fuel cost of generator ,,: fuel cost coefficients of generator , i iii CC abc i i : power generated (.)by generator , : number of generator. Gi Ppu n i Emission Objective. The emission function can be presented as the sum of all types of emission considered, such as O ,2 SO , thermal emission, etc., with suitable pricing or weighting on each pollutant emitted. In the present study, only one type of emission O is taken into account without loss of generality. The amount of O emission is given as a function of generator output, that is, the sum of a quadratic and exponential function: 2 22 1 () 10expton hr x NO n iiGi iGiiiGi i fE PP P where, ,,,, iiiii : coefficients of the i th genera- tor’s O emission characteristic. 3.2. Constraints The optimization problem is bounded by the following constraints: Power balance constraint. The total power gener- ated must supply the total load demand and the transmission losses. 1 0 n Gi D Loss i PPP where P: total load demand (p.u.), and : trans- mission losses (p.u.). loss P The transmission losses are given by [21]: 11 nn Lossij ijijijijij ii PAPPQQBQPP Q where , Q, Acos, Bsin iGi DiiGiDi ij ij ijij ijij ij ij PP PQQ RR VV VV n: number of buses ij R V : series resistance connecting buses i and j i: voltage magnitude at bus i i : voltage angle at bus i i Q P: real power injection at bus i : reactive power injection at bus i Maximum and Minimum Limits of Power Gen- eration. The power generated Gi P by each generator is constrained between its minimum and maximum limits, i.e., minmax minmax min max , , , 1,, GiGi GiGiGiGi iii PPP QQQ VVVi n where minGi : minimum power generated, and : maximum power generated. PmaxGi P Security Constraints. A mathematical formulation of the security constrained EELD problem would re- quire a very large number of constraints to be consid- ered. However, for typical systems the large propor- tion of lines has a rather small possibility of becom- ing overloaded. The EELD problem should consider only the small proportion of lines in violation, or near violation of their respective security limits which are identified as the critical lines. We consider only the critical lines that are binding in the optimal solution. The detection of the critical lines is assumed done by the experiences of the DM. An improvement in the security can be obtained by minimizing the following objective function. max 1 k GijGj j SfPTP T where, G TP is the real power flow is the maximum limit of the real power flow of the jth line and k is the number of monitored lines. The line flow of the jth line is expressed in terms of the control variables Gs, by utilizing the generalized generation distribution fac- tors (GGDF) [22] and is given below. max j T P 1 n Gji i TP DP Gi where, i is the generalized GGDF for line j, due to generator i. D For secure operation, the transmission line loading is restricted by its upper limit as l S max ,1,,SS n where is the number of transmission line. n 3.3. Multiobjective Formulation of EELD Problem The multiobjective EELD optimization problem [11] is Copyright © 2011 SciRes. AM  A. A. MOUSA ET AL.893 therefore formulated as: 1 2 1 2 22 1 1 max () $ () 10exp s.t. 0, , x t n iiGiiGi i NO n iiGi iGiiiGi i n Gi D Loss i MinfxC abP cPhr Min fE PPPton hr PPP SS min max min max min max 1,,, 1,, 1,, 1,, Line GiGi Gi GiGi Gi iii n PPPi n QQQi n VVVi n 4. The Proposed Algorithm Recently, the studies on evolutionary algorithms have shown that these algorithms can be efficiently used to eliminate most of the difficulties of classical methods which can be summarized as: An algorithm has to be applied many times to find multiple Pareto-optimal solutions. Most algorithms demand some knowledge about the problem being solved. Some algorithms are sensitive to the shape of the Pareto-optimal front. The spread of Pareto-optimal solutions depends on efficiency of the single objective optimizer. It is worth mentioning that the goal of a multiobjective optimization problem is not only guide the search to- wards Pareto-optimal front but also maintain population diversity. 4.1. Initialization Stage The algorithm uses two separate population [11], the first population consists of the individuals which ini- tialized randomly satisfying the search space (The lower and upper bounds), while the second population consists of reference points which satisfying all con- straints. However, in order to ensure convergence to the true Pareto-optimal solutions, we concentrated on how elitism could be introduced in the algorithm. So, we pro- pose an archiving/selection [20] strategy that guarantees at the same time progress towards the Pareto-optimal set and a covering of the whole range of the non-dominated solutions. The algorithm maintains an externally fi- nite-sized archive t P t R t of non-dominated solutions which gets iteratively updated in the presence of new solutions based on the concept of -dominance. 4.2. Repair Algorithm The idea of this technique [11] is to separate any feasible individuals in a population from those that are infeasible by repairing infeasible individuals. This approach co- evolves the population of infeasible individuals until they become feasible. Repair process works as follows. As- sume, there is a search point S rS (where is the feasible space). In such a case the algorithm selects one of the reference points (Better reference point has better chances to be selected), say and creates random points S from the segment defined between , r , but the segment may be extended equally on both sides de- termined by a user specified parameter 0, 1. Thus, a new feasible individual is expressed as: 12 1, 1zrz r where 12 and 0, 1 is a random generated number 4.3. LS Stage In this stage, we present modified local search technique (MLS) [23] to improve the solution quality and to ex- plore the less-crowded area in the external archive to possibly obtain more nondominated solutions nearby. We propose a MLS, which is a modification of Hooke and Jeeves method [24] to be suitable for MOP. The general procedure of the MLS techniques can be de- scribed by the following steps. Step 1. Start with an arbitrarily chosen point n m t E , and the prescribed step lengths i in each of the coordinate directions i Set m = 0, assume that m is the size of . ,1,2,,ui t .n E Step 2. Set m = m + 1, and k = 1 where k is number of trial (s.t., max 1, ,kk ) to obtain preferred solution than m . Step 3. The variable i is perturbed about the current temporary base point m to obtain the new temporary base point m as : 1,2,, m mii mii m X Xxuifff Xxuiffffi Xiffff n where, m ffX , mii fX xu , and mii fX xu . Assume is the evaluation of the objective functions at a point. Step 4. If the point m unchanged. While the number of trial k not satisfied, reduce the step length i . The following dynamic equation is presented to reduce i , Copyright © 2011 SciRes. AM  A. A. MOUSA ET AL. 894 max 1, 0,1 k k ii xx rr and go to step 3. Step 5. Else, if m is preferred than m (i.e., mm XfX ) ,then m is the new base point. Step 6. With the help of the base points m m and , blish a pattern direction S as esta mm SX X and find a point m as λS mm XX , where is the step length, (taken as 1). Step 7. If mm XfX set mm X , mm X , and go to 6. Step 8. If mm XfX set mm X , and go to 4. These steps is implemented on all nondominated solu- tions in t to get the true Pareto optimal solution and to explore the less-crowded area in the external archive. Figure 2 shows the pseudo code of the MLS algorithm. 4.4. Identifying a Best Compromise Solution Optimization of the above-formulated objective func- tions [11] yields not a single optimal solution, but a set of Pareto optimal solutions, in which one objective can- not be improved without sacrificing other objectives. For practical applications, however, we need to select one solution, which will satisfy the different goals to some extent. Such a solution is called best compromise solu- tion. TOPSIS method given by Yoon and Hwang [19] has the ability to identify the best alternative from a fi- nite set of alternatives quickly. It stands for “Technique for Order Preference by Similarity to the Ideal Solution” which based upon the concept that the chosen alternative should have the shortest distance from the positive ideal solution and the farthest from the negative ideal solution. MLS technique Start with t m XE Generate m X While ( m fX fX m stopped criterion satisfied) DO If mm XX Reduce Generate i x m X End Establish a pattern direction Generate Sm X If mm XfX , set , mm XX mm XX Set Generate Sm X Else if mm XfX mm XX End End Figure 2. The pseudo code of the MLS algorithm. TOPSIS can incorporate relative weights of criterion importance. The idea of TOPSIS can be expressed in a series of steps. Step1: Obtain performance data for n alternatives over M criteria ij 1, ,,1, ,injM. Step2: Calculate normalized rating (vector normaliza- tion is used) . ij Step3: Develop a set of importance weights r W, for each of the criteria. The basis for these weights can be anything, but, usually, is adhoc reflective of relative im- portance. ijj ij Vwr Step4: Identify the ideal alternative (extreme per- formance on each criterion) . S 1 12 ,,,, max, min,1,, jm ij ij Sv v v vj Jvj Jin where! is a set of benefit attributes and2 is a set of cost attributes. Step5: Identify the nadir alternative (reverse extreme performance on each criterion) . S 1 12 ,,,, min ,max ,1,, jm ij ij Sv v v vj Jvj Jin Step6: Develop a distance measure over each criterion to both ideal (D ) and nadir (). D _ 22 , i ijji ijj jj DvvDvv Step7: For each alternative, determine a ratio R equal to the distance to the nadir divided by the sum of the distance to the nadir and the distance to the ideal, D RDD Step8: Rank alternative according to ratio R (in Step 7) in descending order, recommend the alternative with the maximum ratio. The pseudo code of the proposed algo- rithm are shown in Figure 3. 4.5. Basic Algorithm It uses two separate population, the first population 0t P (where t is the iteration counter) consists of the individuals which initialized randomly satisfying the search space, while the second population consists of reference points which satisfying all constraints. Also, it stores initially the Pareto-optimal solutions externally in a finite sized archive of non-dominated solutions t R 0 . We use cluster algorithm to create the next population Copyright © 2011 SciRes. AM  A. A. MOUSA ET AL.895 1. A,x 2. DxA:boxxboxx 3. if D 4. \ 5. : 6. {}\ 7. :(()()) 8. {} 9. 10. 11. 12. INPUT then AA xD else ifxboxxboxxxxthen AAxx else ifxboxxboxxthen AAx else AA endif OUTPUT A Figure 3. Algorithm of select operator. 1t P, if t PAt (i.e., the size of the population greater than the size of archive ) then new population consists of all individual from t P()t A 1t P t and the population are considered for the clustering procedure to complete , if t P 1t P t At P then P solutions are picked up at random from t and di- rectly copied to the new population . 1t P Since our goal is to find new nondominated solutions, one simple way to combine multiple objective functions into a scalar fitness function is the following weighted sum approach: 11 1 m mmj j j xwfxwfxwfx where x is a string (i.e., individual), x is a com- bined fitness function, i x is the ith objective function. When a pair of strings is selected for a crossover operation, we assign a random number to each weight as follows. 1 ., 1,2,, . i im j j random wi random m Calculate the fitness value of each string using the ran- dom weights i. Select a pair of strings from the current population according to he following selection probabil- ity w oing x in the population t P f a str min min , t t t xP fx fP x fx fP min where min| tt fP fxxP This step is repeated for selecting 2P Paris of strings from the current populations. For each selected pair apply crossover operation to generate two new strings, for each strings generated by crossover operation, apply a mutation operator with a pre-specified mutation prob- ability. The system also includes the survival of some of the good individuals without crossover or selection. This method seems to be better than the others if applied con- stantly. Algorithm in Figure 4, shows the proposed algorithm. The purpose of the function generate is to generate a new population in each iteration t, possibly using the contents of the old population and the old archive set 1t P 1t in associated with variation (recombination and mutation). The function update gets the new popula- tion and the old archive set t P 1t and determines the updated one, namely t as indicated in Figure 3. The function Ls is to explore the less-crowded area in the current archive to possibly obtain more nondominated solutions which declared in pseudo code in Figure 2. The algorithm maintains a finite-sized archive of non- dominated solutions which gets iteratively updated in the presence of a new solutions based on the concept of -dominance, such that new solutions are only accepted in the archive if they are not -dominated by any other element in the current archive (Figure 3), The use of -dominance also makes the algorithms practical by allowing a decision maker to control the resolution of the Pareto set approximation by choosing an appropriate value. 5. Implementation of the Proposed Approach The described methodology is applied to the standard IEEE 30-bus 6-generator test system to investigate the effectiveness of the proposed approach. The values of fuel cost and emission coefficients are given in Table 1. For comparison purposes with the reported results, the system is considered as losses and the security constraint is released. The techniques used in this study were de- veloped and implemented on 1.7-MHz PC using MAT- LAB environment. Table 2 lists the parameter setting used in the algorithm for all runs. 00 0(0) 11 1 () 1. t0 2. Create , 3. nondominated 3. terminate (,) do 4. 1 5. generate(,) 6. update(,) 7. 8. () 9. Output: 10. Identify Best comprom t ttt ttt tt t PR AP whileA tfalse tt PAP AAP end while ALSA A ize Solution Figure 4. Algorithm of the proposed algorithm. Copyright © 2011 SciRes. AM 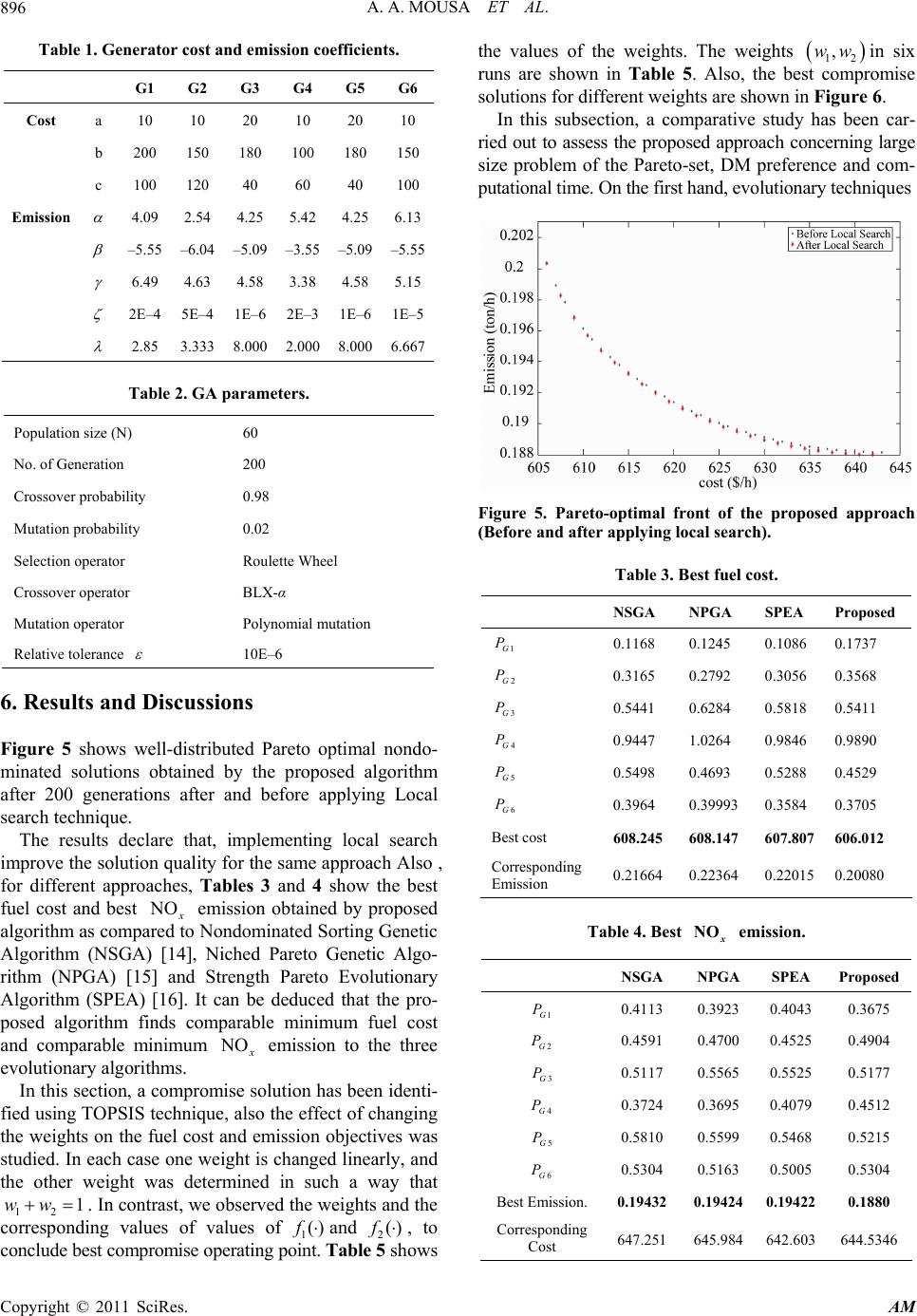 A. A. MOUSA ET AL. 896 Table 1. Generator cost and emission coefficients. G1 G2 G3 G4 G5 G6 Cost a 10 10 20 10 20 10 b 200 150 180 100 180 150 c 100 120 40 60 40 100 Emission 4.09 2.54 4.25 5.42 4.25 6.13 –5.55 –6.04 –5.09 –3.55 –5.09 –5.55 6.49 4.63 4.58 3.38 4.58 5.15 2E–4 5E–4 1E–6 2E–3 1E–6 1E–5 2.85 3.333 8.000 2.000 8.000 6.667 Table 2. GA parameters. Population size (N) 60 No. of Generation 200 Crossover probability 0.98 Mutation probability 0.02 Selection operator Roulette Wheel Crossover operator BLX-α Mutation operator Polynomial mutation Relative tolerance 10E–6 6. Results and Discussions Figure 5 shows well-distributed Pareto optimal nondo- minated solutions obtained by the proposed algorithm after 200 generations after and before applying Local search technique. The results declare that, implementing local search improve the solution quality for the same approach Also , for different approaches, Tables 3 and 4 show the best fuel cost and best O emission obtained by proposed algorithm as compared to Nondominated Sorting Genetic Algorithm (NSGA) [14], Niched Pareto Genetic Algo- rithm (NPGA) [15] and Strength Pareto Evolutionary Algorithm (SPEA) [16]. It can be deduced that the pro- posed algorithm finds comparable minimum fuel cost and comparable minimum O emission to the three evolutionary algorithms. In this section, a compromise solution has been identi- fied using TOPSIS technique, also the effect of changing the weights on the fuel cost and emission objectives was studied. In each case one weight is changed linearly, and the other weight was determined in such a way that 12. In contrast, we observed the weights and the corresponding values of values of1and 2 1ww ()f () , to conclude best compromise operating point. Table 5 shows the values of the weights. The weights in six runs are shown in Table 5. Also, the best compromise solutions for different weights are shown in Figure 6. 12 ,ww In this subsection, a comparative study has been car- ried out to assess the proposed approach concerning large size problem of the Pareto-set, DM preference and com- putational time. On the first hand, evolutionary techniques Figure 5. Pareto-optimal front of the proposed approach (Before and after applying local search). Table 3. Best fuel cost. NSGA NPGA SPEA Proposed 1G P 0.1168 0.1245 0.1086 0.1737 2G P 0.3165 0.2792 0.3056 0.3568 3G P 0.5441 0.6284 0.5818 0.5411 4G P 0.9447 1.0264 0.9846 0.9890 5G P 0.5498 0.4693 0.5288 0.4529 6G P 0.3964 0.39993 0.3584 0.3705 Best cost 608.245 608.147 607.807 606.012 Corresponding Emission 0.21664 0.22364 0.22015 0.20080 Table 4. Best emission. NOx NSGA NPGA SPEA Proposed 1G P 0.4113 0.3923 0.4043 0.3675 2G P 0.4591 0.4700 0.4525 0.4904 3G P 0.5117 0.5565 0.5525 0.5177 4G P 0.3724 0.3695 0.4079 0.4512 5G P 0.5810 0.5599 0.5468 0.5215 6G P 0.5304 0.5163 0.5005 0.5304 Best Emission. 0.194320.19424 0.19422 0.1880 Corresponding Cost 647.251645.984 642.603 644.5346 Copyright © 2011 SciRes. AM 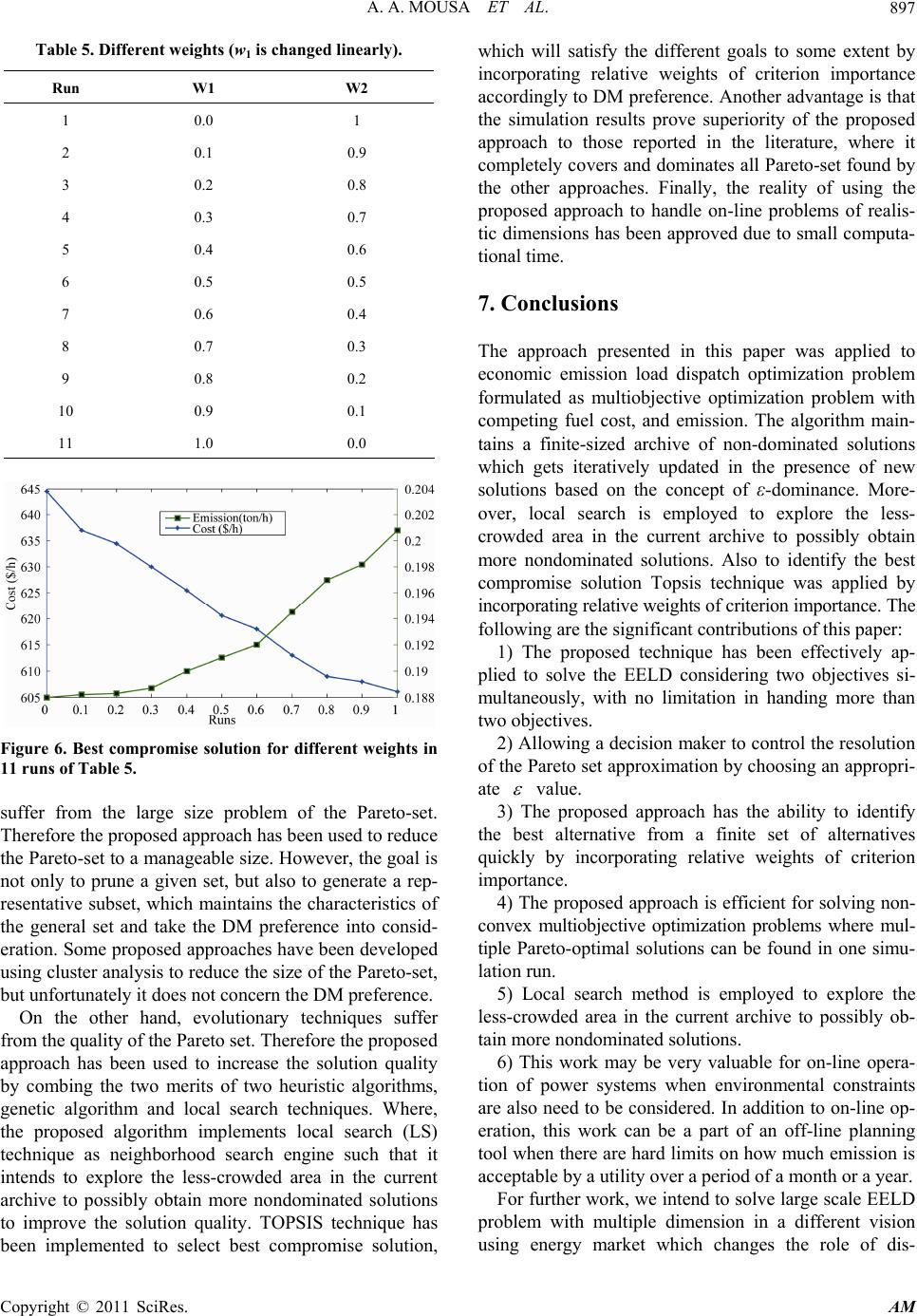 A. A. MOUSA ET AL.897 Table 5. Different weights (w1 is changed linearly). W2 W1 Run 1 0.0 1 0.9 0.1 2 0.8 0.2 3 0.7 0.3 4 0.6 0.4 5 0.5 0.5 6 0.4 0.6 7 0.3 0.7 8 0.2 0.8 9 0.1 0.9 10 0.0 1.0 11 Figure 6. Best compromise solution for different weights in 11 runs of Table 5. suffer from the large size problem of the Pareto-set. Therefore the proposed approach has been used to reduce the Pareto-set to a manageable size. However, the goal is not only to prune a given set, but also to generate a rep- resentative subset, which maintains the characteristics of the general set and take the DM preference into consid- eration. Some proposed approaches have been developed using cluster analysis to reduce the size of the Pareto-set, but unfortunately it does not concern the DM preference. On the other hand, evolutionary techniques suffer from the quality of the Pareto set. Therefore the proposed approach has been used to increase the solution quality by combing the two merits of two heuristic algorithms, genetic algorithm and local search techniques. Where, the proposed algorithm implements local search (LS) technique as neighborhood search engine such that it intends to explore the less-crowded area in the current archive to possibly obtain more nondominated solutions to improve the solution quality. TOPSIS technique has been implemented to select best compromise solution, which will satisfy the different goals to some extent by incorporating relative weights of criterion importance accordingly to DM preference. Another advantage is that the simulation results prove superiority of the proposed approach to those reported in the literature, where it completely covers and dominates all Pareto-set found by the other approaches. Finally, the reality of using the proposed approach to handle on-line problems of realis- tic dimensions has been approved due to small computa- tional time. 7. Conclusions The approach presented in this paper was applied to economic emission load dispatch optimization problem formulated as multiobjective optimization problem with competing fuel cost, and emission. The algorithm main- tains a finite-sized archive of non-dominated solutions which gets iteratively updated in the presence of new solutions based on the concept of ε-dominance. More- over, local search is employed to explore the less- crowded area in the current archive to possibly obtain more nondominated solutions. Also to identify the best compromise solution Topsis technique was applied by incorporating relative weights of criterion importance. The following are the significant contributions of this paper: 1) The proposed technique has been effectively ap- plied to solve the EELD considering two objectives si- multaneously, with no limitation in handing more than two objectives. 2) Allowing a decision maker to control the resolution of the Pareto set approximation by choosing an appropri- ate value. 3) The proposed approach has the ability to identify the best alternative from a finite set of alternatives quickly by incorporating relative weights of criterion importance. 4) The proposed approach is efficient for solving non- convex multiobjective optimization problems where mul- tiple Pareto-optimal solutions can be found in one simu- lation run. 5) Local search method is employed to explore the less-crowded area in the current archive to possibly ob- tain more nondominated solutions. 6) This work may be very valuable for on-line opera- tion of power systems when environmental constraints are also need to be considered. In addition to on-line op- eration, this work can be a part of an off-line planning tool when there are hard limits on how much emission is acceptable by a utility over a period of a month or a year. For further work, we intend to solve large scale EELD problem with multiple dimension in a different vision using energy market which changes the role of dis- Copyright © 2011 SciRes. AM  A. A. MOUSA ET AL. Copyright © 2011 SciRes. AM 898 patcher. 8. Acknowledgements The authors are grateful to the anonymous reviewers for their valuable comments and helpful suggestions which greatly improved the paper’s quality. 9. References [1] S. F. Brodesky and R. W. Hahn, “Assessing the Influence of Power Pools on Emission Constrained Economic Dis- patch,” IEEE Transactions on Power Systems, Vol. 1, No. 1, 1986, pp. 57-62. doi:10.1109/TPWRS.1986.4334844 [2] G. P. Granelli, M. Montagna, G. L. Pasini and P. Ma- rannino, “Emission Constrained Dynamic Dispatch,” Electric Power Systems Research, Vol. 24, 1992, pp. 56- 64. doi:10.1016/0378-7796(92)90045-3 [3] A. Farag, S. Al-Baiyat and T. C. Cheng, “Economic Load Dispatch Multiobjective Optimization Procedures Using Linear Programming Techniques,” IEEE Transactions on Power Systems, Vol. 10, No. 2, 1995, pp. 731-738. doi:10.1109/59.387910 [4] C. S. Chang, K. P. Wong and B. Fan, “Security-Cons- trained Multiobjective Generation Dispatch Using Bicri- terion Global Optimization,” IEE Proceedings Genera- tion, Transmission & Distribution, Vol. 142, No. 4, 1995, pp. 406-414. doi:10.1049/ip-gtd:19951806 [5] J. S. Dhillon, S. C. Parti and D. P. Kothari, “Stochastic Economic Emission Load Dispatch,” Electric Power Sys- tem Research, Vol. 26, 1993, pp. 179-186. doi:10.1016/0378-7796(93)90011-3 [6] J. X. Xu, C. S. Chang and X. W. Wang, “Constrained Multiobjective Global Optimization of Longitudinal In- terconnected Power System by Genetic Algorithm,” IEE Proceedings Generation, Transmission & Distribution, Vol. 143, No. 5, 1996, pp. 435-446. doi:10.1049/ip-gtd:19960418 [7] J. Zahavi and L. Eisenberg, “Economic-Environmental Power Dispatch,” IEEE Transactions on Systems, Man, and Cybernetics, Vol. 5, No. 5, 1985, pp. 485-489. doi:10.1109/TSMC.1975.5408370 [8] Y. T. Hsiao, H. D. Chiang, C. C. Liu and Y. L. Chen, “A Computer Package for Optimal Multi-Objective VAR Planning in Large Scale Power Systems,” IEEE Transac- tions on Power Systems, Vol. 9, No. 2, 1994, pp. 668-676. doi:10.1109/59.317676 [9] R. Yokoyama, S. H. Bae, T. Morita and H. Sasaki, “Mul- tiobjective Generation Dispatch Based on Probability Se- curity Criteria,” IEEE Transactions on Power Systems, Vol. 3, No. 1, 1988, pp. 317-324. doi:10.1109/59.43217 [10] B. S. Kermanshahi, Y. Wu, K. Yasuda and R. Yokoyama, “Environmental Marginal Cost Evaluation by Non- Inferiority Surface,” IEEE Transactions on Power Sys- tems, Vol. 5, No. 4, 1990, pp. 1151-1159. doi:10.1109/59.99365 [11] M. Azzam and A. A. Mousa, “Using Genetic Algorithm and Topsis Technique for Multiobjective Reactive Power Compensation,” Electric Power Systems Research, Vol. 80, No. 6, 2010, pp. 675-681. doi:10.1016/j.epsr.2009.10.033 [12] M. S. Osman, M. A. Abo-Sinna and A. A. Mousa, “A Solution to the Optimal Power Flow Using Genetic Algo- rithm,” Mathematics & Computation, Vol. 155, No. 2, 2004, pp. 391-405. [13] M. S. Osman, M. A. Abo-Sinna and A. A. Mousa, “Epsi- lon-Dominance Based Multiobjective Genetic Algorithm for Economic Emission Load Dispatch Optimization Problem,” Electric Power Systems Research, Vol. 79, No. 11, 2009, pp. 1561-1567. doi:10.1016/j.epsr.2009.06.003 [14] M. A. Abido, “A Novel Multiobjective Evolutionary Algorithm for Environmental/Economic Power Dispatch,” Electric Power Systems Research, Vol. 65, No. 1, 2003, pp. 71-81. doi:10.1016/S0378-7796(02)00221-3 [15] M. A. Abido, “A Niched Pareto Genetic Algorithm for Multiobjective Environmental/Economic Dispatch,” Electri- cal Power and Energy Systems, Vol. 25, No. 2, 2003, pp. 97-105. doi:10.1016/S0142-0615(02)00027-3 [16] M. A. Abido, “Environmental/Economic Power Dispatch using Multiobjective Evolutionary Algorithms,” IEEE Transactions on Power Systems, Vol. 18, No. 4, 2003, pp. 1529-1537. doi:10.1109/TPWRS.2003.818693 [17] K. Deb, “Multi-Objective Optimization Using Evolution- ary Algorithms,” Wiley, New York, 2001. [18] C. M .Fonseca and P. J. Fleming, “An Overview of Evo- lutionary Algorithms in Multiobjective Optimization,” Evolutionary Computation, Vol. 3, No. 1, 1995, pp. 1-16. doi:10.1162/evco.1995.3.1.1 [19] D. L. Olson, “Comparison of Weights in TOPSIS Mod- els,” Mathematical and Computer Modelling, Vol. 40, No. 7-8, 2004, pp. 721-727. doi:10.1016/j.mcm.2004.10.003 [20] M. Laumanns, L. Thiele, K. Deb and E. Zitzler, “Archiving with Guaranteed Convergence and Diversity in Multi-Objective Optimization,” GECCO 2002: Pro- ceedings of the Genetic and Evolutionary Computation Conference, Morgan Kaufmann Publishers, New York, July 2002, pp. 439-447. [21] D. Hazarika and P. K. Bordoloi, “Modified Loss Coeffi- cients in the Determination of Optimum Generation Scheduling,” IEE Proceedings, Vol. 138, No. 2, 1991, pp. 166-172 [22] W. Y. Ng, “Generalized Generation Distribution Factors for Power System Security Evaluations,” IEEE Transac- tions on Power Apparatus and Systems, Vol. 100, 1981, pp. 1001-1005. doi:10.1109/TPAS.1981.316635 [23] A. A. Mousa, R. M. Rizk-Allah and W. F. A. El-Wahed, “A Hybrid Ant Colony Optimization Approach Based Local Search Scheme Formultiobjective Design Optimi- zations,” Electric Power Systems Research, Vol. 81, No. 4, 2011, pp. 1014-1023. doi:10.1016/j.epsr.2010.12.005 [24] R. Hooke and T. A. Jeeves, “Direct Search Solution of Numerical and Statistical Problems,” Journal of the ACM, Vol. 8, No. 2, 1961, pp. 212-229. doi:10.1145/321062.321069
|